




Optimizing Efficient Wheel-legged Mobile Strategy for Wheel-legged Robot
-
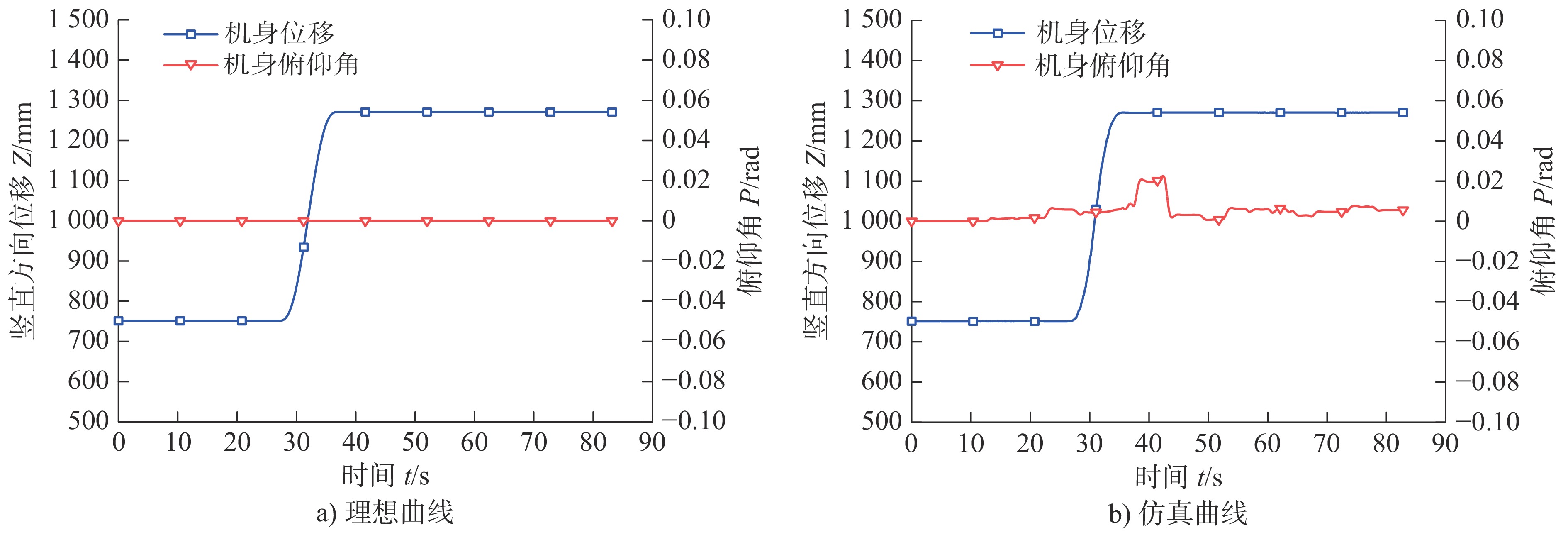
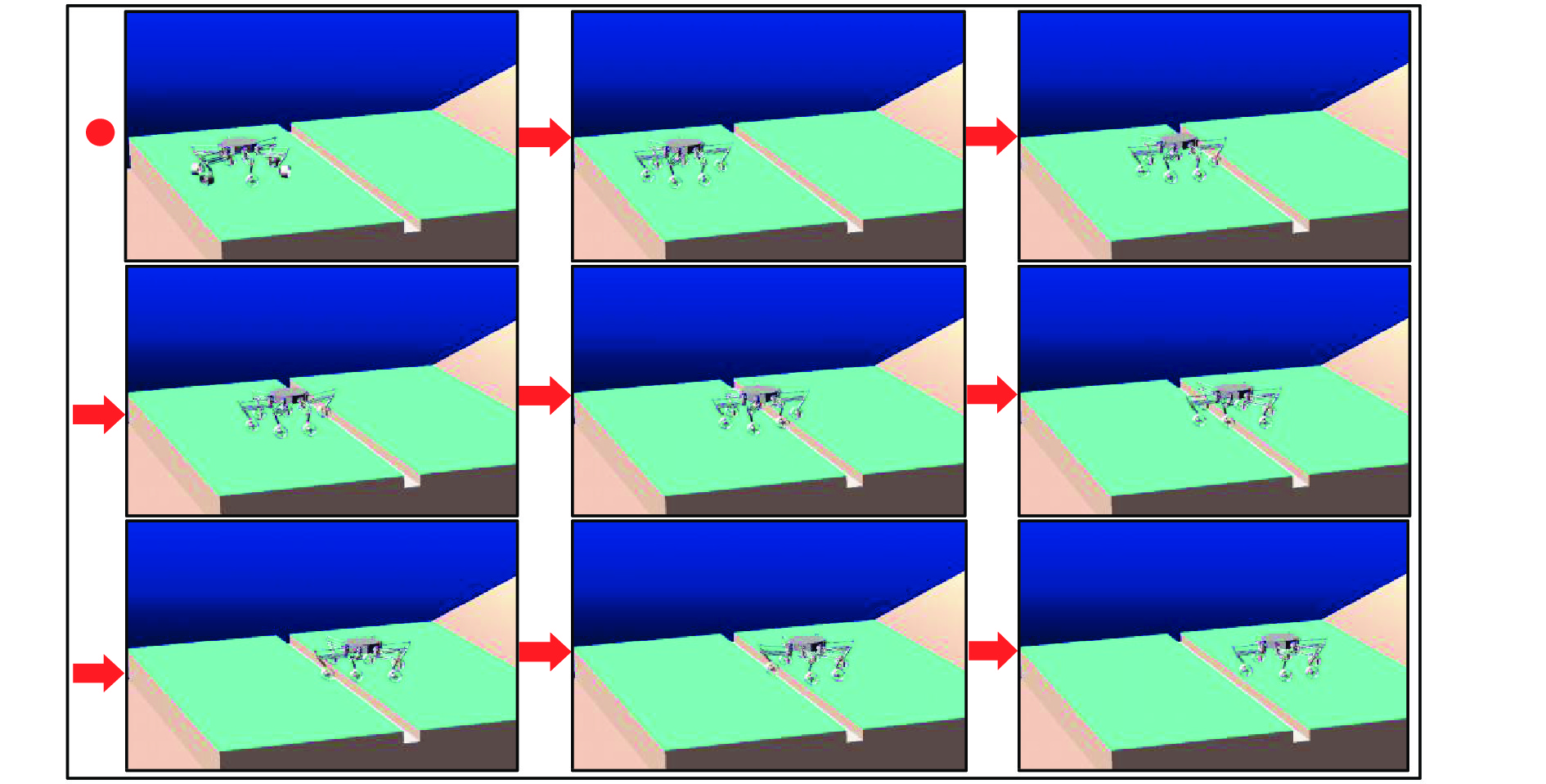
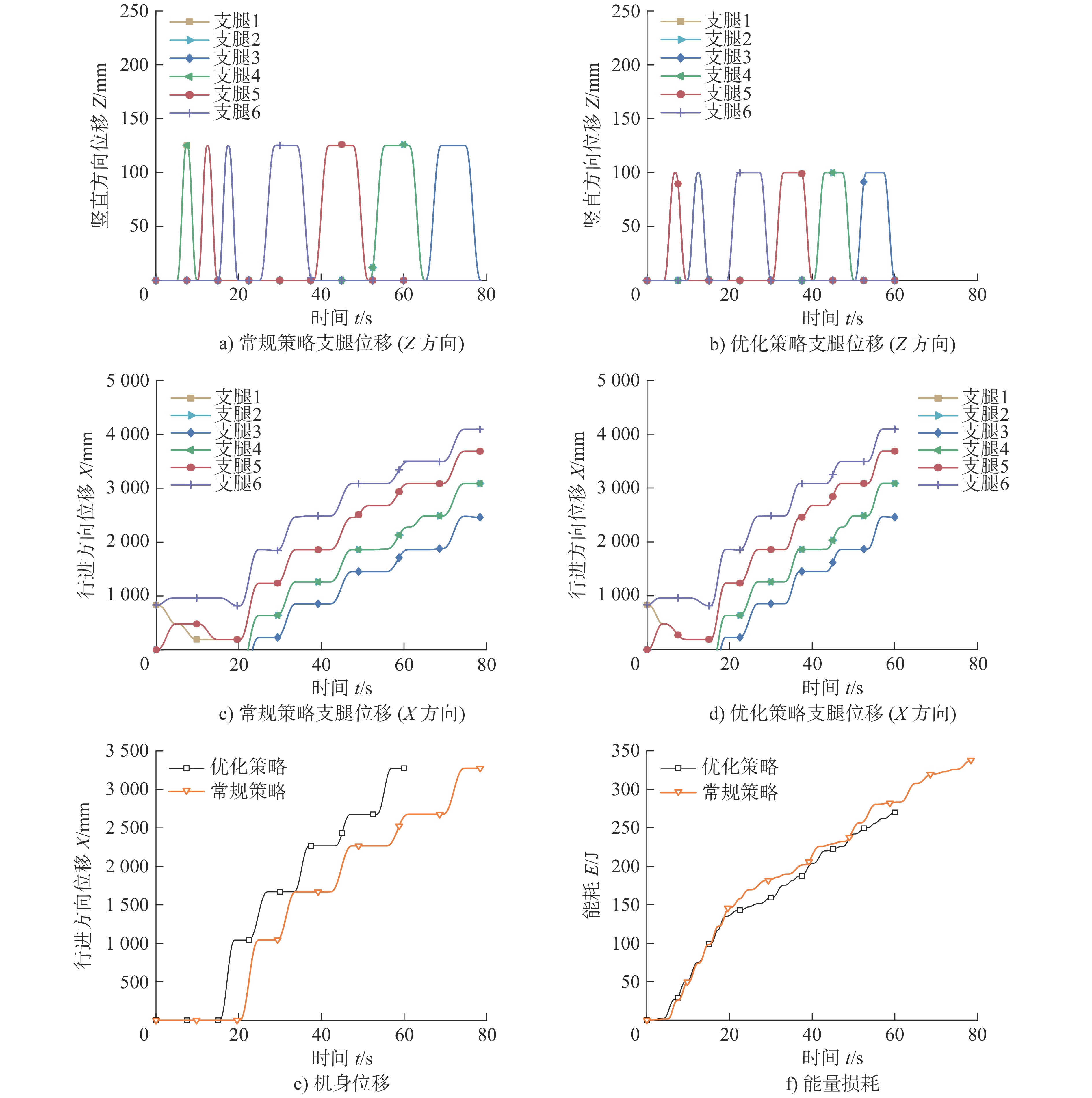
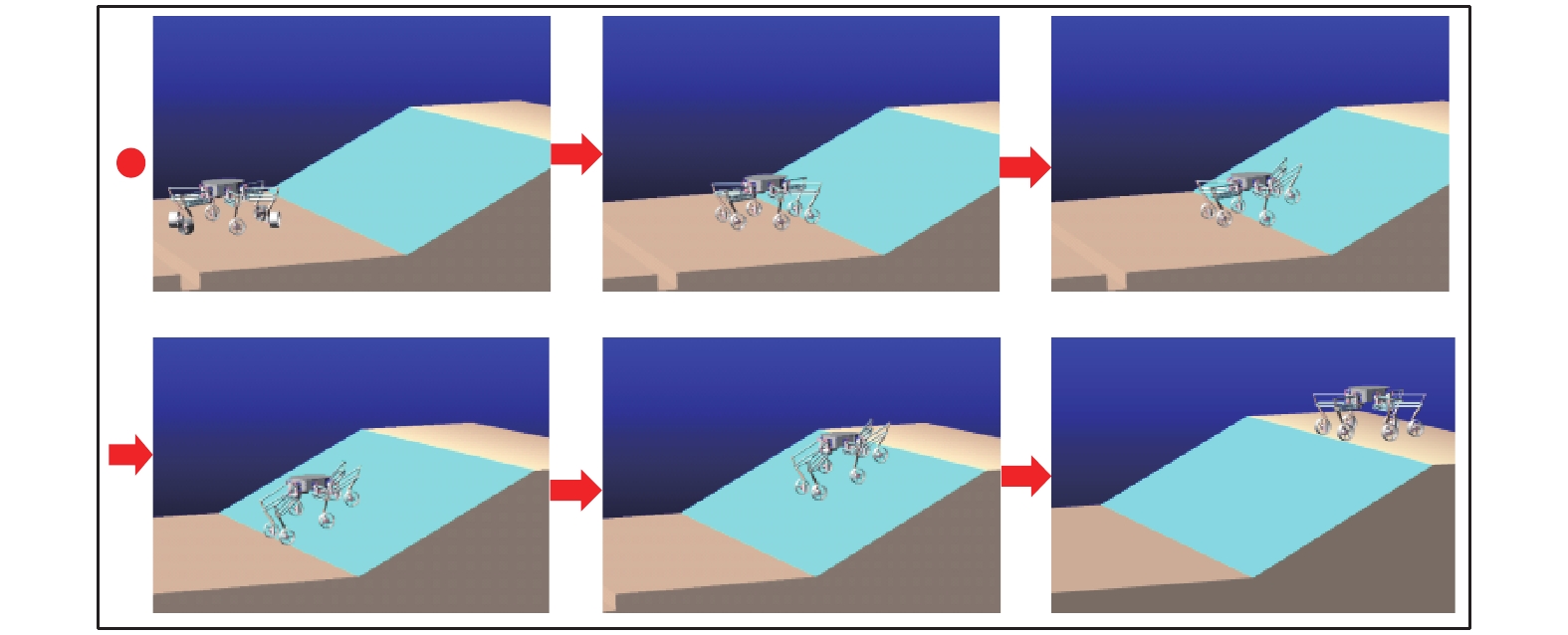
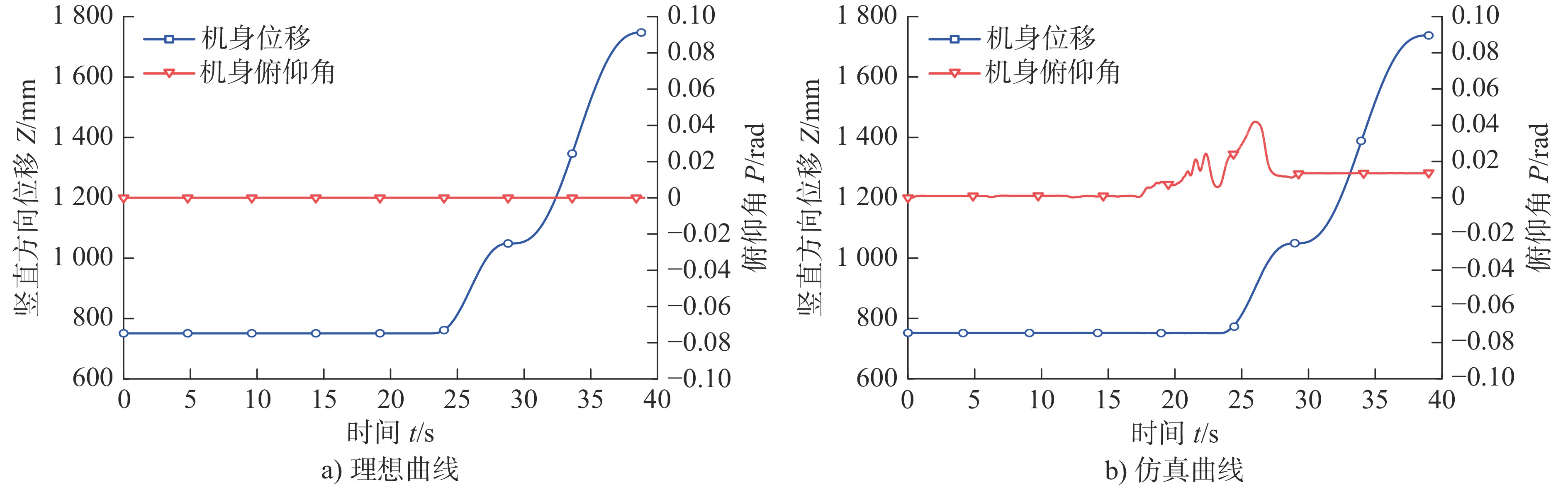
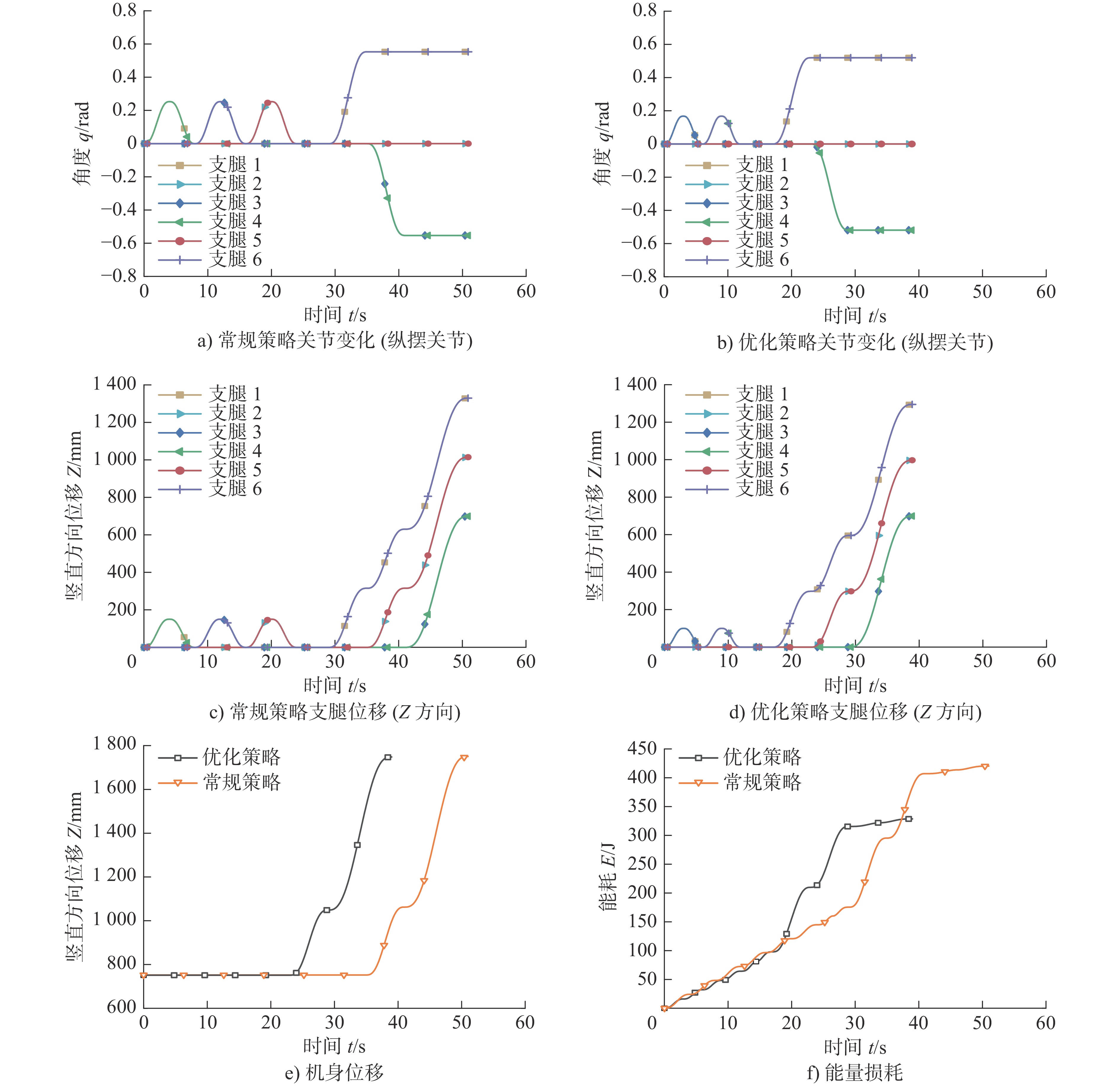
摘要: 复杂地形下的高效移动策略是轮腿式机器人研制过程中的技术难点。本文在常规移动策略的基础上,通过引入关节空间状态量描述支腿相对于机身的位姿,引入位姿转换量描述相邻时序的位姿状态量间的运动过程,进而建立起移动策略与时间和能耗的数学模型,并以移动时间最短和能耗最低为目标,建立了移动策略的优化模型,通过优化迭代形成轮-腿高效移动策略。复杂地形下的越障仿真表明,机器人采用轮-腿高效移动策略可实现越障功能,与常规移动策略相比,移动时间及能耗均明显降低,验证了轮-腿高效移动策略的有效性。Abstract: It is technically difficult to develop a wheel-legged robot in complex terrains with the efficient mobile strategy. Based on the conventional mobile strategy, this paper introduces the number of states of joint space to describe the position and posture of the wheel-legs of the robot relative to its body, and the position and posture conversion amount is introduced to describe the motion process between the numbers of adjacent temporal states. Then, the model of the mobile strategy with time consumption and energy consumption considered is established. Taking the shortest mobile time and the lowest energy consumption as goals, the optimization model of the mobile strategy is established, and the efficient mobile strategy for the wheel-legged robot is developed through optimization iteration. The simulation results on the wheel-legged robot crossing obstacles in complex terrains show that the efficient mobile strategy for the wheel-legged robot can successfully complete its obstacle crossing. Compared with the conventional mobile strategy, the mobile time and energy consumption are significantly reduced, verifying that the efficient mobile strategy is effective.
-
Key words:
- wheel-legged robot /
- efficient mobile strategy /
- moblie time /
- energy consumption
-
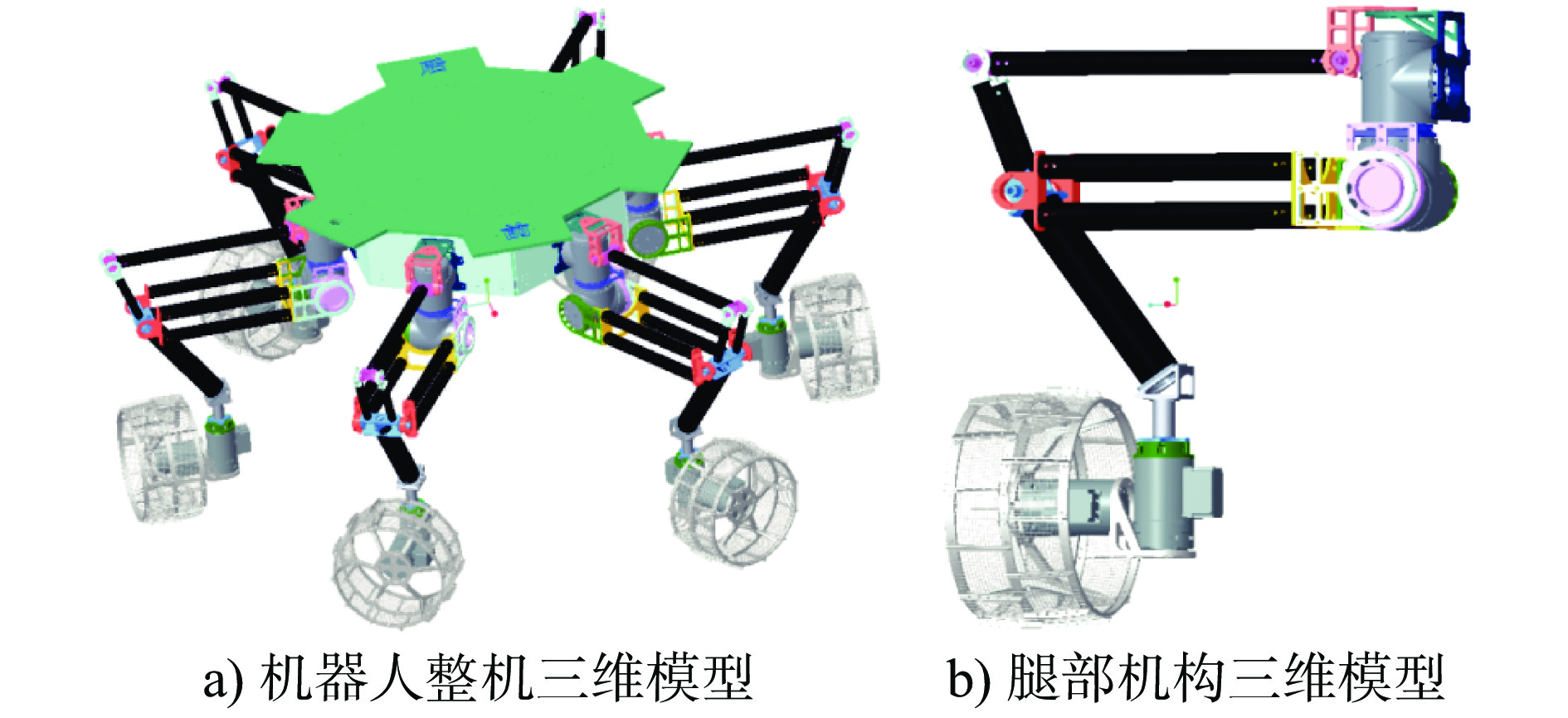
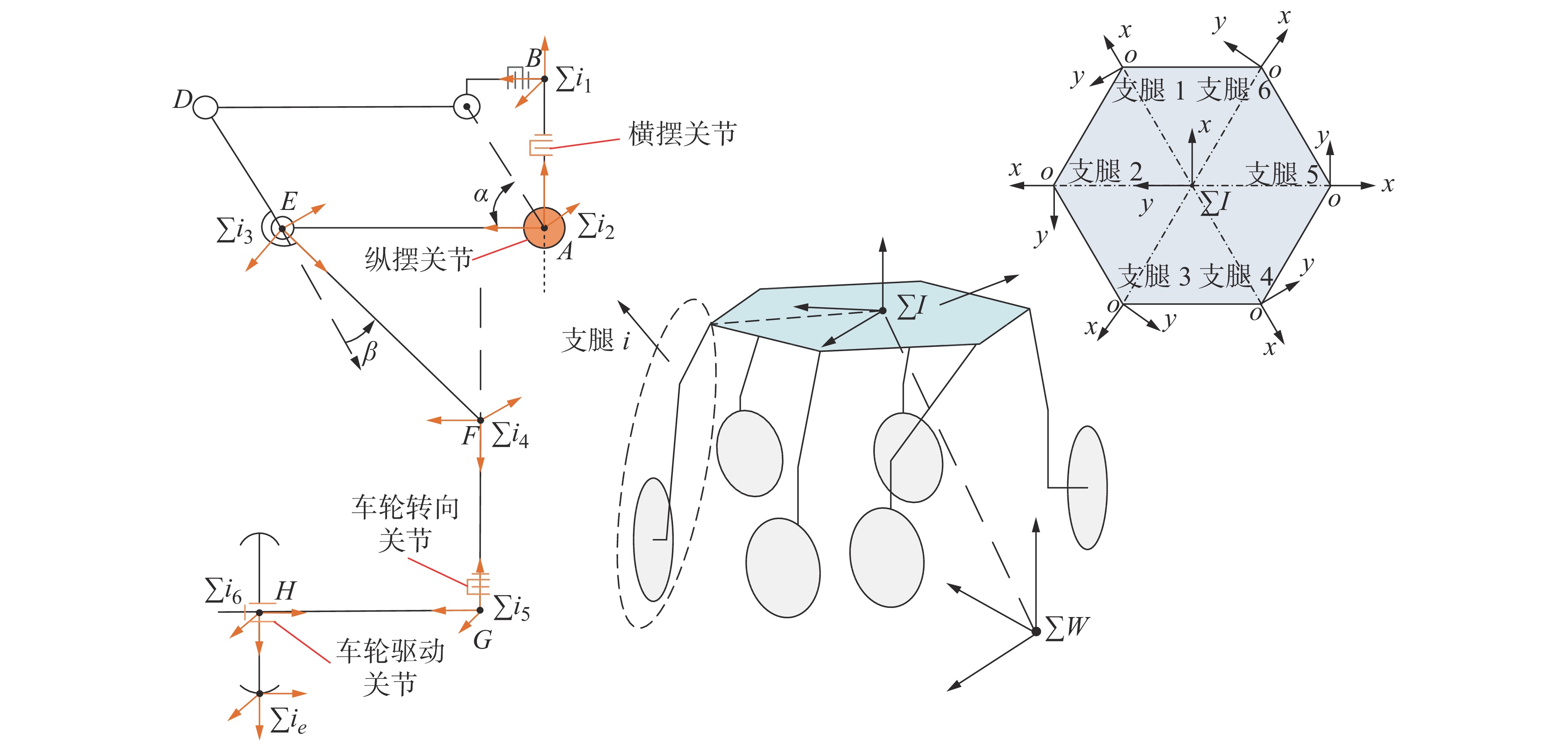
表 1 机器人主要结构参数
参数 数值 参数 数值 LAB 226 mm LGH 142 mm LAC 170 mm $ \alpha $ 1.21 rad LAE 600 mm $ \beta $ 0.256 rad LEF 285 mm Rwheel 140 mm LFG 152 mm Rbody 380 mm  下载: 导出CSV
下载: 导出CSV
-
[1] COMIN F J, SAAJ C M. Models for slip estimation and soft terrain characterization with multilegged wheel-legs[J]. IEEE Transactions on Robotics, 2017, 33(6): 1438-1452. doi: 10.1109/TRO.2017.2723904 [2] LI J, WU Q B, WANG J Z, et al. Neural networks-based sliding mode tracking control for the four wheel-legged robot under uncertain interaction[J]. International Journal of Robust and Nonlinear Control, 2021, 31(9): 3406-4323. [3] XIN Y X, CHAI H, LI Y B, et al. Speed and acceleration control for a two wheel-leg robot based on distributed dynamic model and whole-body control[J]. IEEE Access, 2019, 7: 180630-180639. doi: 10.1109/ACCESS.2019.2959333 [4] 辛鹏飞, 李德伦, 刘鑫, 等. 小型星表探测机器人发展现状与趋势[J]. 航空学报, 2021, 42(1): 117-132.XIN P F, LI D L, LIU X, et al. Development of small-scale planet surface exploration robots: status quo and trend[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 117-132. (in Chinese) [5] 张元勋, 黄靖, 韩亮亮. 星表移动探测机器人研究现状综述[J]. 航空学报, 2021, 42(1): 523909.ZHANG Y X, HUANG J, HAN L L. Research status of planetary surface mobile exploration robots: review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523909. (in Chinese) [6] 刘吉成, 季洪超. 新型轮腿机器人步态规划策略[J]. 中国机械工程, 2019, 30(18): 2257-2262.LIU J C, JI H C. Gait planning strategy for a new type of wheel-legged robot[J]. China Mechanical Engineering, 2019, 30(18): 2257-2262. (in Chinese) [7] 徐坤, 郑羿, 丁希仑. 六轮腿式机器人结构设计与运动模式分析[J]. 北京航空航天大学学报, 2016, 42(1): 59-71.XU K, ZHENG Y, DING X L. Structure design and motion mode analysis of a six wheel-legged robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(1): 59-71. (in Chinese) [8] 郭为忠, 汤耘, 高峰. 轮腿式机器人步态生成的拓扑矩阵方法[J]. 机械工程学报, 2017, 53(21): 1-8. doi: 10.3901/JME.2017.21.001GUO W Z, TANG Y, GAO F. Topology matrix method for gait generation of wheel-legged robots[J]. Journal of Mechanical Engineering, 2017, 53(21): 1-8. (in Chinese) doi: 10.3901/JME.2017.21.001 [9] SUN J Y, YOU Y W, ZHAO X R, et al. Towards more possibilities: motion planning and control for hybrid locomotion of wheeled-legged robots[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3723-3730. doi: 10.1109/LRA.2020.2979626 [10] 张世俊, 邢琰, 胡勇. 障碍地形下的机器人轮足复合越障步态规划方法[J]. 导航与控制, 2019, 18(6): 62-70 + 79.ZHANG S J, XING Y, HU Y. Wheel-legged obstacle negotiating gait planning method for robot under obstacle terrain[J]. Navigation and Control, 2019, 18(6): 62-70 + 79. (in Chinese) [11] 黄晓辰, 张明路, 张小俊, 等. 机器人坐标系建立的改进DH方法[J]. 农业机械学报, 2014, 45(10): 313-318 + 325.HUANG X C, ZHANG M L, ZHANG X J, et al. Improved DH method to build robot coordinate system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 313-318 + 325. (in Chinese) [12] 王晓磊, 金振林, 李晓丹, 等. 串并混联四足仿生机器人动力学建模与分析[J]. 农业机械学报, 2019, 50(4): 401-412.WANG X L, JIN Z L, LI X D, et al. Dynamic modeling and analysis of serial-parallel hybrid quadruped bionic robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 401-412. (in Chinese) [13] 李满宏, 张明路, 张建华, 等. 基于运动相对性的六足机器人机体运动规划[J]. 中国机械工程, 2015, 26(3): 313-318. doi: 10.3969/j.issn.1004-132X.2015.03.006LI M H, ZHANG M L, ZHANG J H, et al. Body motion planning for a hexapod robot based on relative motion[J]. China Mechanical Engineering, 2015, 26(3): 313-318. (in Chinese) doi: 10.3969/j.issn.1004-132X.2015.03.006 [14] 张赫. 具有力感知功能的六足机器人及其崎岖地形步行控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2014ZHANG H. Research on force sensing based hexapod robot and control for walking on uneven terrain[D]. Harbin: Harbin Institute of Technology, 2014. (in Chinese) [15] MESSURI D, KLEIN C. Automatic body regulation for maintaining stability of a legged vehicle during rough-terrain locomotion[J]. IEEE Journal on Robotics and Automation, 1985, 1(3): 132-141. doi: 10.1109/JRA.1985.1087012 [16] 王冠宇, 丁亮, 高海波, 等. 增强爬坡能力的六足机器人分步二次规划足力分配算法及试验验证[J]. 机械工程学报, 2019, 55(21): 11-20.WANG G Y, DING L, GAO H B, et al. Decomposed QP CFDA for hexapod robots to enhance the slope-climbing ability and experimental validation[J]. Journal of Mechanical Engineering, 2019, 55(21): 11-20. (in Chinese) -






 点击查看大图
点击查看大图

图(16) / 表(1)
计量
- 文章访问数: 325
- HTML全文浏览量: 117
- PDF下载量: 75
- 被引次数: 0
