




Kinematics Analysis and Performance Optimization of a New 2T1R Parallel Robot with Pa Pairs in Branch Chain
-
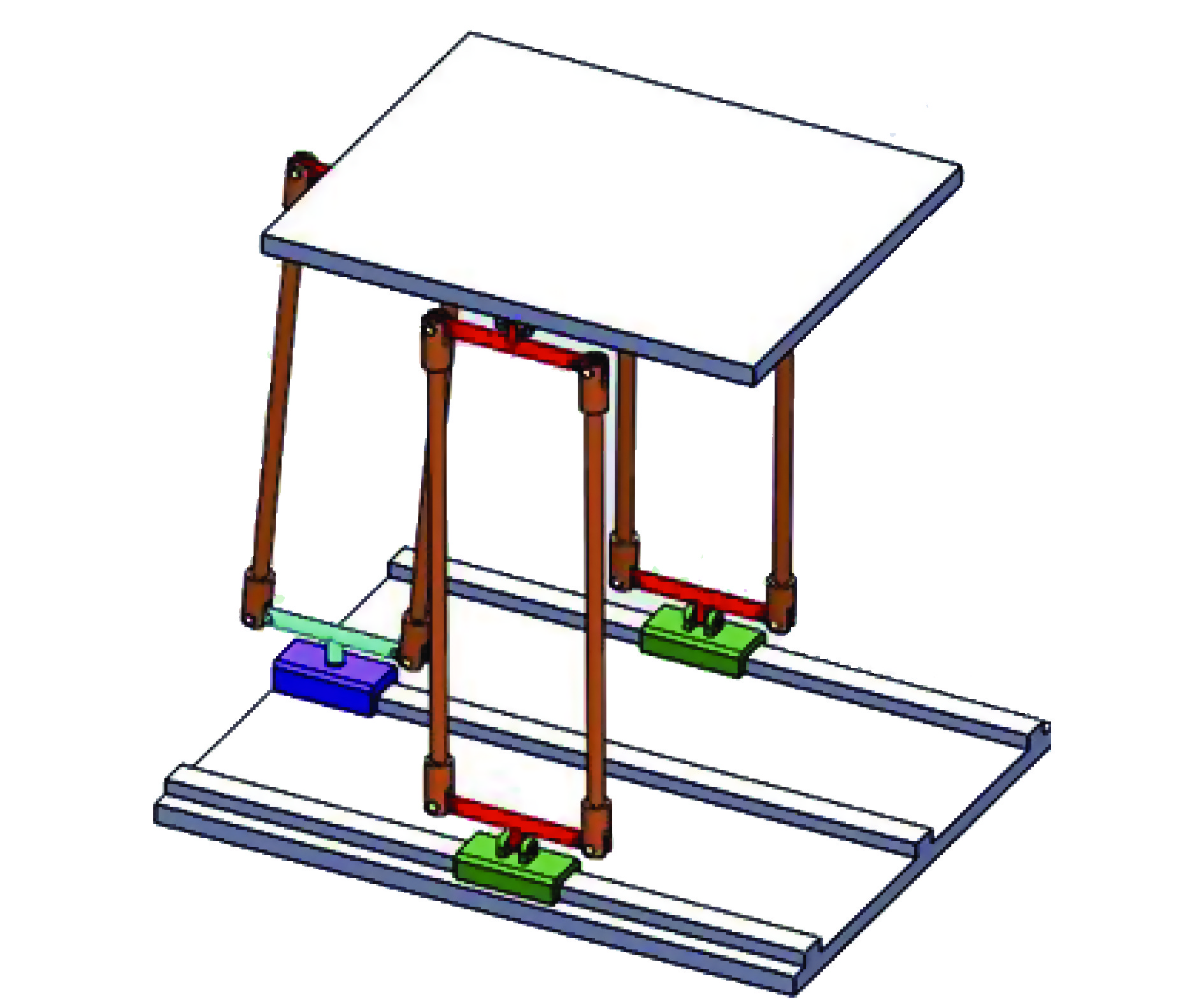
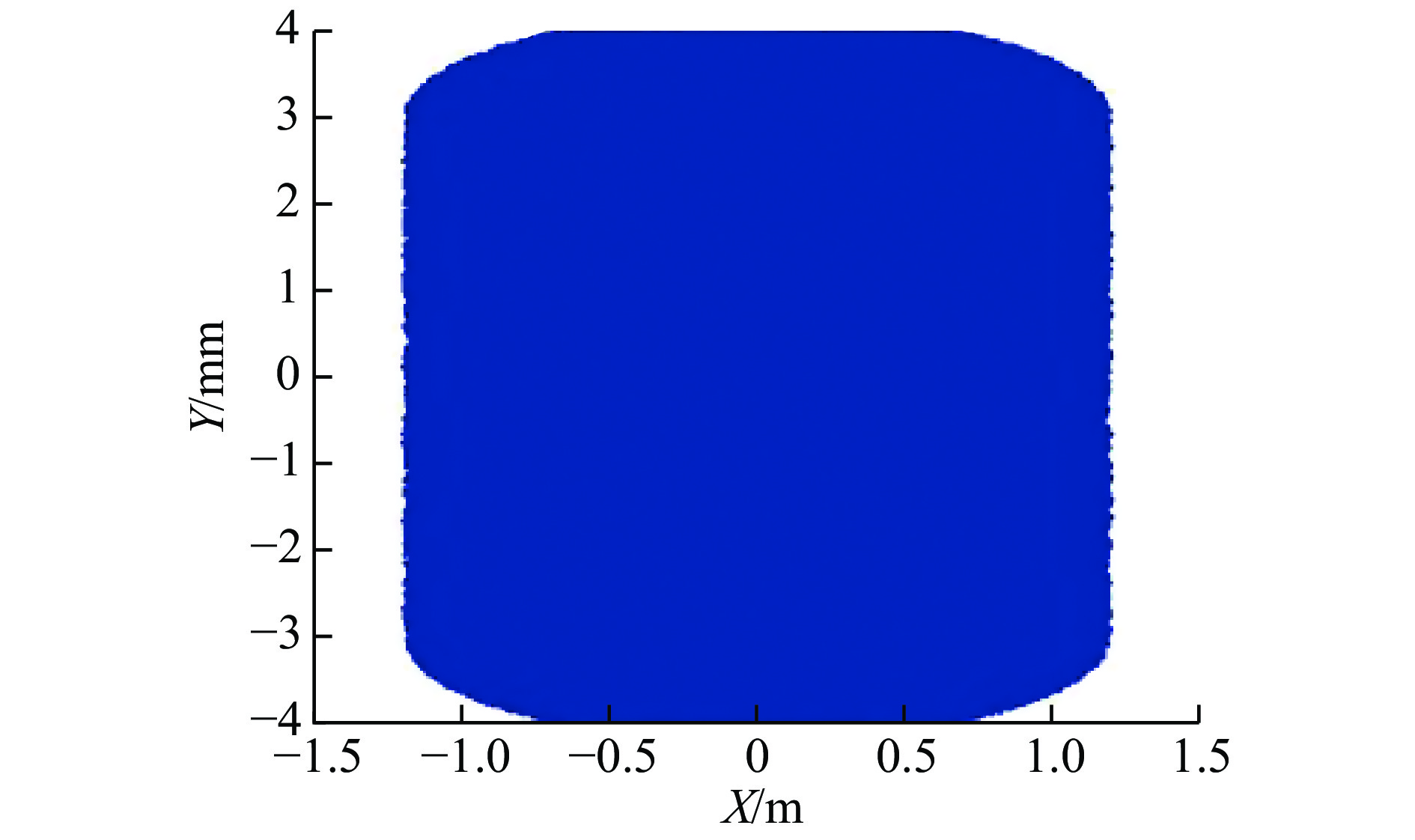
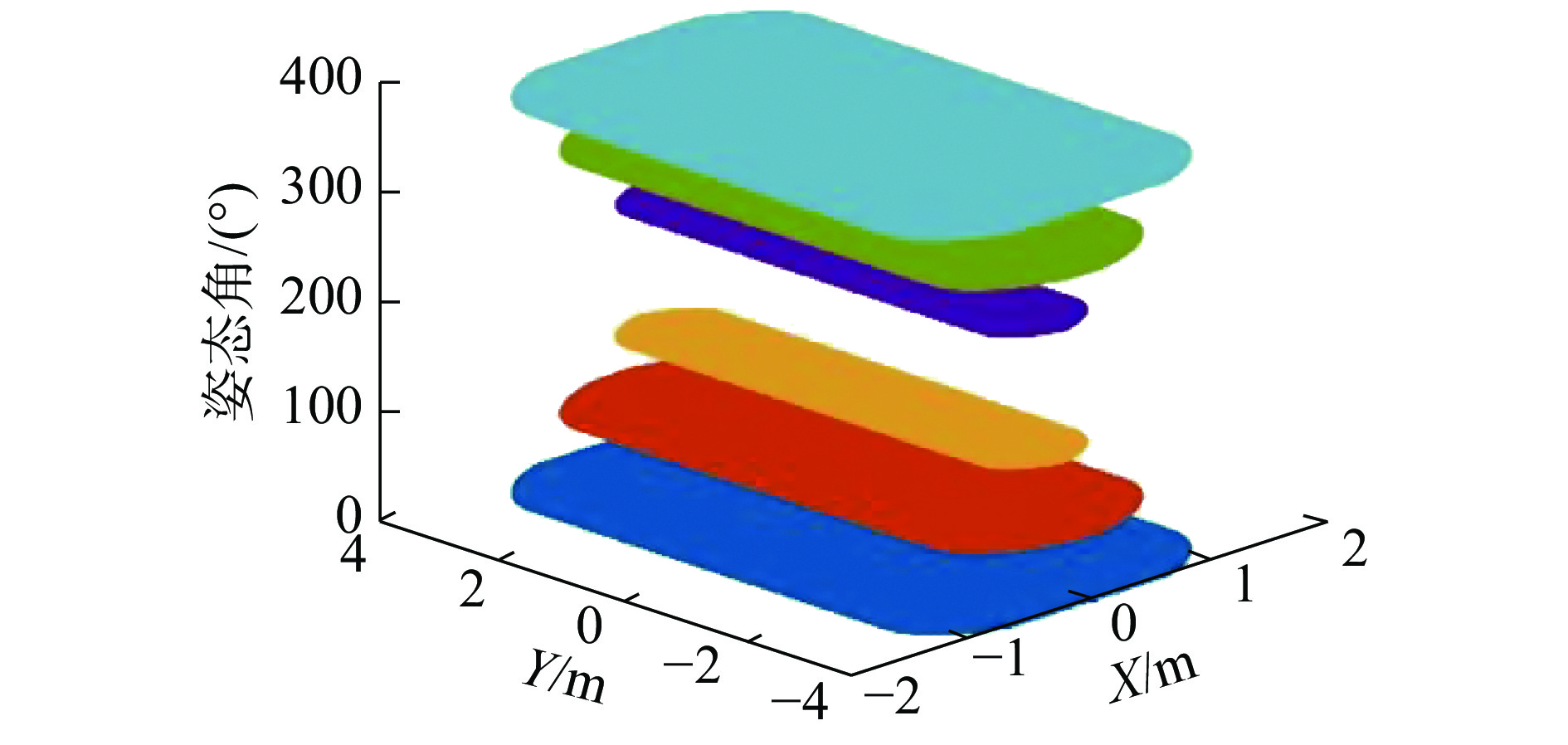
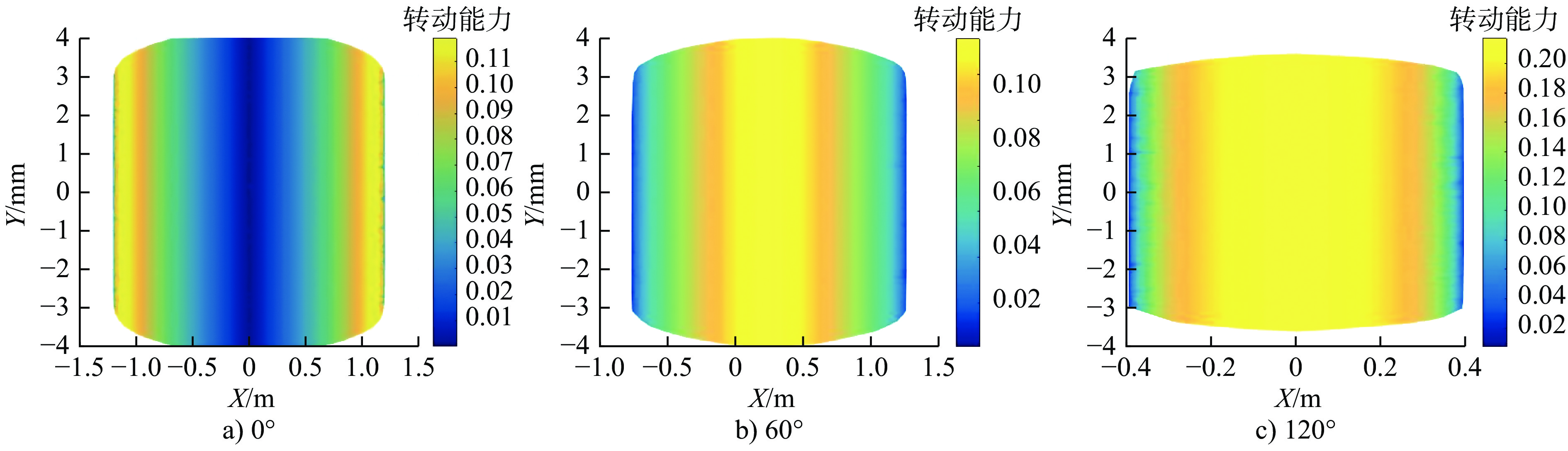
摘要: 以并联机构2T1R作为研究对象,基于并联机构拓扑结构设计理论综合出一类支链含Pa平行四边形机构的2T1R并联机构,并优选出两种新型2PRPaR-PPaR与2RRPaR-PPaR并联机构,以2PRPaR-PPaR并联机构为例,利用方位特征集拓扑结构理论计算机构的方位特征集、自由度、耦合度等拓扑特性,根据建立的特征方程并得到机构的运动学逆解解析式。基于此,分别对机构的工作空间、灵巧度、转动能力等性能指标可视化分析,并通过图形化对比分析机构参数对这些性能指标的影响,最后建立工作空间和全局灵巧度多目标优化模型,选择快速非支配多目标优化算法(NSGA-Ⅱ)实现机构尺度综合,结果表明:2PRPaR-PPaR机构具有工作空间较大、灵巧度较好、转动能力高等优良特性,优化出一组不同姿态角下的对工作空间和全局灵巧度的多目标pareto优化解。
-
关键词:
- 并联机构 /
- 工作空间 /
- 灵巧度 /
- 转动能力 /
- 多目标pareto优化
Abstract: The parallel mechanism 2T1R was taken as the research object, based on the topological structure design theory of parallel mechanism, a kind of 2T1R parallel mechanism with Pa parallelogram and branch chain is synthesized, and two new types of 2PRPaR-PPaR and 2RRPaR-PPaR parallel mechanisms are selected. Taking 2PRPaR-PPaR parallel mechanism as an example, the topological characteristics of mechanism such as azimuth feature set, degree of freedom and coupling degree are calculated by using the topological structure theory of azimuth feature set. The inverse kinematics solution of the mechanism is obtained based on the established characteristic equation. Based on this, the performance indexes of the mechanism, such as workspace, dexterity and rotation ability, are visualized and analyzed respectively, and the influence of the mechanism parameters on these performance indexes is analyzed through the graphical comparison. Finally, the multi-objective optimization model of workspace and global dexterity is established, and the fast non dominated multi-objective optimization algorithm (NSGA -Ⅱ) is selected to realize the scale synthesis of mechanism. The results show that 2 PRPaR-PPaR mechanism has the advantages of large workspace, good dexterity and high rotation ability, and a set of multi-objective Pareto optimization solutions for workspace and global dexterity under different attitude angles are optimized out.-
Key words:
- parallel manipulator /
- workspace /
- dexterity /
- rotation ability /
- multi objective Pareto optimization
-
表 1 机构输出特征与支链描述
方位特征集 编号 支链描述及简图 $ \left[ {\begin{array}{*{20}{c}} {{t^2}} \\ {{r^1}} \end{array}} \right] $ A1 HSOC{−P(⊥P(4R)//R−)} 
A2 HSOC{−◇(P(4R)−P(4R)//R−)} 
A3 HSOC{−◇(P(4−4R), P(4−4R)//R−)} 
$ \left[ {\begin{array}{*{20}{c}} {{t^3}} \\ {{r^1}} \end{array}} \right] $ B1 HSOC{−P//R(⊥P(4R)//R−)} 
B2 HSOC{−P//R(⊥P(4R)//R−)} 
 下载: 导出CSV
下载: 导出CSV
表 2 2T1R并联机构组合方案
编号 特点 支链描述 1 支链结构
完全相同$ 3 - HSOC\{ { { - P( { \bot {P^{( {4R} )}}} )//R - } \}} $ 2 支链结构
完全相同$ 3 - HSOC\{ { { - \diamondsuit ( {{P^{( {4R} )}} - } ){P^{( {4R} )}}//R - } \}} $ 3 支链结构
完全相同$ 3 - HSOC\{ { { - \diamondsuit ( {{P^{4 - ( {4R} )}} - } ){P^{( {4 - 4R} )}}//R - } \}} $ 4 支链结构
部分相同$ 1 - HSOC\{ { { - P( { \bot {P^{( {4R} )}}} )//R - } \}} $
$ 2 - HSOC\{ { { - P//R( { \bot {P^{( {4R} )}}} )//R - } \}} $5 支链结构
部分相同$ 1 - HSOC\{ { { - \diamondsuit ( {{P^{( {4R} )}} - } ){P^{( {4R} )}}//R - } \}} $
$ 2 - HSOC\{ { { - P//R( { \bot {P^{( {4R} )}}} )//R - } \}} $6 支链结构
部分相同$ 1 - HSOC\{ { { - \diamondsuit ( {{P^{4 - ( {4R} )}} - } ){P^{( {4 - 4R} )}}//R - } \}} $
$ 2 - HSOC\{ { { - P//R( { \bot {P^{( {4R} )}}} )//R - } \}} $7 支链结构
部分相同$ 1 - HSOC\{ { { - P( { \bot {P^{( {4R} )}}} )//R - } \}} $
$ 2 - HSOC\{ { { - R//R( { \bot {P^{( {4R} )}}} )//R - } \}} $8 支链结构
部分相同$ 1 - HSOC\{ { { - \diamondsuit ( {{P^{( {4R} )}} - } ){P^{( {4R} )}}//R - } \}} $
$ 2 - HSOC\{ { { - R//R( { \bot {P^{( {4R} )}}} )//R - } \}} $9 支链结构
部分相同$ 1 - HSOC\{ { { - \diamondsuit ( {{P^{4 - ( {4R} )}} - } ){P^{( {4 - 4R} )}}//R - } \}} $
$ 2 - HSOC\{ { { - R//R( { \bot {P^{( {4R} )}}} )//R - } \}} $10 支链结构
完全不同$ 1 - HSOC\{ { { - P( { \bot {P^{( {4R} )}}} )//R - } \}} $
$ 1 - HSOC\{ { { - \diamondsuit ( {{P^{( {4R} )}} - } ){P^{( {4R} )}}//R - } \}} $
$ 1 - HSOC\{ { { - \diamondsuit ( {{P^{4 - ( {4R} )}} - } ){P^{( {4 - 4R} )}}//R - } \}} $
下载: 导出CSV
表 3 在工作空间面积约为15 m2的典型的Pareto最优解
参数 0° 60° 120° 180° L/m 1.785 2 2 2 r/cm 0.502 1 0.607 0.563 R/m 1.999 1.45 1.036 1.167 S/m2 15.28 14.74 15.98 15.95 $ {G_{CI}} $ 0.108 0.224 0.1621 0.119
下载: 导出CSV
-
[1] 刘伟, 刘宏昭. 具有2T1R与2R1T运动模式3自由度并联机构型综合[J]. 农业机械学报, 2018, 49(7): 401-409. doi: 10.6041/j.issn.1000-1298.2018.07.050LIU W, LIU H Z. Type synthesis of 3-DOF parallel mechanism with 2T1R and 2R1T motion mode[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(7): 401-409. (in Chinese) doi: 10.6041/j.issn.1000-1298.2018.07.050 [2] 张彦斌, 吴鑫, 刘宏昭. 完全各向同性2T1R空间并联机器人机构型综合[J]. 农业机械学报, 2011, 42(11): 200-207.ZHANG Y B, WU X, LIU H Z. Structural synthesis of fully-isotropic 2T1R spatial parallel robotic manipulators[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(11): 200-207. (in Chinese) [3] 汪满新, 黄田. 1T2R 3自由度并联机构拓扑结构综合[J]. 机械工程学报, 2015, 51(17): 1-7. doi: 10.3901/JME.2015.17.001WANG M X, HUANG T. Type synthesis of 1T2R 3-DOF parallel mechanism[J]. Journal of Mechanical Engineering, 2015, 51(17): 1-7. (in Chinese) doi: 10.3901/JME.2015.17.001 [4] 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012YANG T L, LIU A X, LUO Y F, et al. Theory and application of robot mechanism topology[M]. Beijing: Science Press, 2012. (in Chinese) [5] 张彦斌, 张树乾, 吴鑫. 空间2T1R型并联机器人机构的设计与运动学分析[J]. 机械科学与技术, 2014, 33(4): 484-489.ZHANG Y B, ZHANG S Q, WU X. Design and kinematics analysis of a 2T1R-type spatial parallel robotic mechanisms[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(4): 484-489. (in Chinese) [6] 屈淑维, 李瑞琴, 郭志宏. 一种三自由度并联解耦机构的型综合[J]. 机械设计与研究, 2017, 33(1): 31-34.QU S W, LI R Q, GUO Z H. Type synthesis of a 3-DOFs decouple parallel mechanisms[J]. Machine Design and Research, 2017, 33(1): 31-34. (in Chinese) [7] 邓嘉鸣, 许可, 赵迎春, 等. 无寄生运动非对称空间2T1R并联机构设计与运动学分析[J]. 农业机械学报, 2018, 49(6): 408-417. doi: 10.6041/j.issn.1000-1298.2018.06.049DENG J M, XU K, ZHAO Y C, et al. Design and kinematics analysis of asymmetric 2T1R-type spatial parallel mechanism without parasitic motion[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 408-417. (in Chinese) doi: 10.6041/j.issn.1000-1298.2018.06.049 [8] 黄勇刚, 黄茂林. 平面2T1R并联机构无过约束构型设计[J]. 重庆大学学报, 2009, 32(5): 481-486. doi: 10.11835/j.issn.1000-582X.2009.05.001HUANG Y G, HUANG M L. Synthesis of planar 2T1R non-overconstrained parallel mechanisms[J]. Journal of Chongqing University, 2009, 32(5): 481-486. (in Chinese) doi: 10.11835/j.issn.1000-582X.2009.05.001 [9] 许可, 沈惠平, 邓嘉鸣, 等. 3-RRR平面并联机构的拓扑结构优化及其运动学性能改善[J]. 机械科学与技术, 2017, 36(12): 1866-1872.XU K, SHEN H P, DENG J M, et al. Optimizing topological structure of 3-RRR plane parallel mechanism and improving its kinematic performance[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(12): 1866-1872. (in Chinese) [10] SUN T, HUO X M. Type synthesis of 1T2R parallel mechanisms with parasitic motions[J]. Mechanism and Machine Theory, 2018, 128: 412-428. doi: 10.1016/j.mechmachtheory.2018.05.014 [11] 刘志忠, 柳洪义, 罗忠, 等. 机器人工作空间求解的蒙特卡洛法改进[J]. 农业机械学报, 2013, 44(1): 230-235. doi: 10.6041/j.issn.1000-1298.2013.01.043LIU Z Z, LIU H Y, LUO Z, et al. Improvement on Monte Carlo method for robot workspace determination[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 230-235. (in Chinese) doi: 10.6041/j.issn.1000-1298.2013.01.043 [12] 刘辛军, 汪劲松, 王启明, 等. 一种空间3自由度并联机器人的工作空间和转动能力分析[J]. 自然科学进展, 2005, 15(2): 212-220. doi: 10.3321/j.issn:1002-008X.2005.02.013LIU X J, WANG J S, WANG Q M, et al. Analysis of workspace and rotation ability of a spatial 3-DOF parallel robot[J]. Progress in Natural Science, 2005, 15(2): 212-220. (in Chinese) doi: 10.3321/j.issn:1002-008X.2005.02.013 [13] 沈惠平, 李菊, 王振, 等. 基于结构降耦和运动解耦的并联机构拓扑结构优化及其性能改善[J]. 机械工程学报, 2017, 53(19): 176-186. doi: 10.3901/JME.2017.19.176SHEN H P, LI J, WANG Z, et al. Topology structure optimization and performance improvement for parallel mechanisms based on structure coupling-reducing and motion decoupling[J]. Journal of Mechanical Engineering, 2017, 53(19): 176-186. (in Chinese) doi: 10.3901/JME.2017.19.176 [14] RUSSO M, HERRERO S, ALTUZARRA O, et al. Multi-objective optimization of a tripod parallel mechanism for a robotic leg[C]//Proceedings of the 7th International Workshop on Computational Kinematics. Futuroscope-Poitiers: Springer, 2018: 374-382 [15] ASGARI M, ARDESTANI M A, ASGARI M. Singularity analysis of a novel three translational DoF parallel robot considering kinematic asymmetric property[C]//The Second RSI/ISM International Conference on Robotics and Mechatronics. Tehran: IEEE, 2014: 78-85 [16] ZHANG G, LI J, LIU Z K. A multiple objective NSGA-II-based optimization program (MONOP) and its application to ReaxFF reactive force field for 2, 4, 6-trinitrotoluene diffusion in the aqueous phase[J]. The Journal of Physical Chemistry C, 2019, 123(32): 19962-19969. doi: 10.1021/acs.jpcc.9b05036 [17] LU S, LI Y M, DING B X. Multi-objective dimensional optimization of a 3-DOF translational PKM considering transmission properties[J]. International Journal of Automation and Computing, 2019, 16(6): 748-760. doi: 10.1007/s11633-019-1184-9 -





 点击查看大图
点击查看大图
图(12) / 表(3)
计量
- 文章访问数: 161
- HTML全文浏览量: 68
- PDF下载量: 23
- 被引次数: 0
