




Single Closed-chain Full R Pair of Multi-mode Omnidirectional Ground Mobile Robot
-
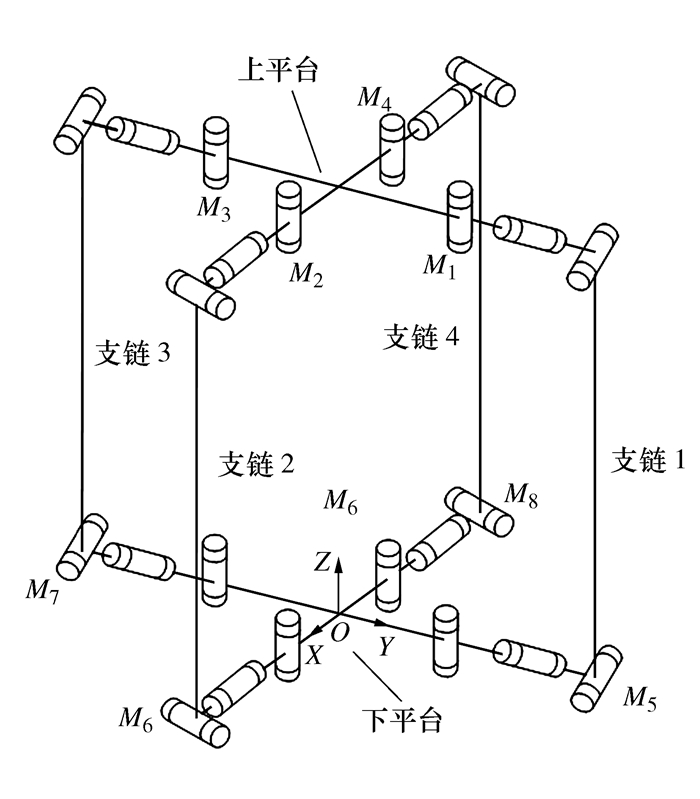
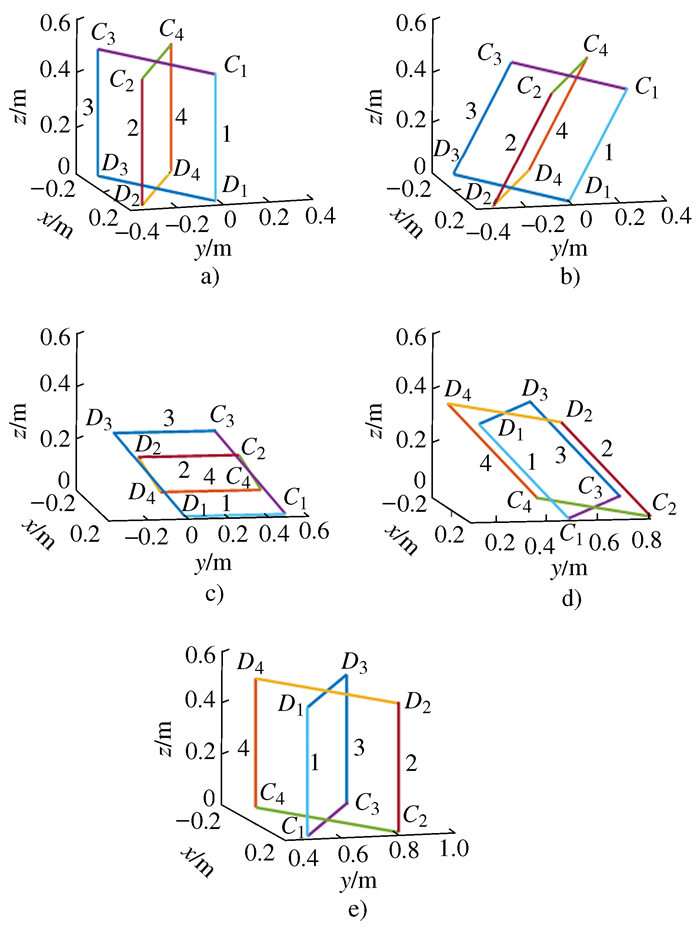
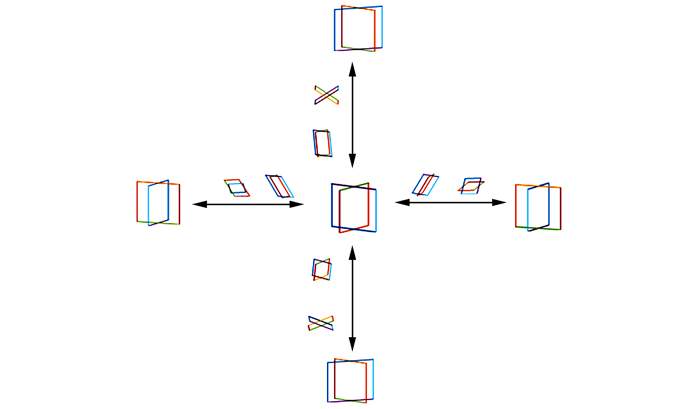
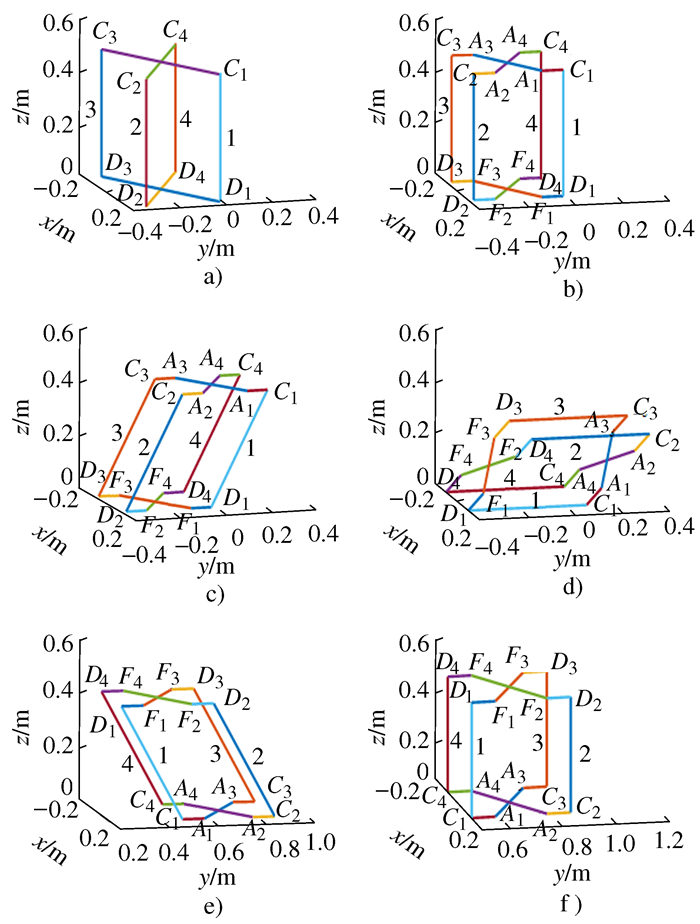
摘要: 为解决移动机器人运动过程中因翻倒、失稳而失去运动能力的问题,提出一种具有可变形结构的多模式全向地面移动机器人。以单环全R闭链为单元,通过分时控制其转动副可实现三方向几何变形,使两闭链正交形成的4-RRRRRR并联移动机器人具有四种不同滚动模式,且各模式可相互切换,机器人运动过程中一旦翻倒、失稳,可变形为其他模式继续移动。通过对机构进行自由度、步态规划、运动可行性分析及各模式虚拟样机仿真,结果表明,机器人可实现各运动模式且能在各模式间相互切换,并具有良好的越障能力。Abstract: In order to solve the problem of loss of motion ability due to overturning and instability during the movement of a mobile robot, a multi-mode omnidirectional ground mobile robot with a deformable structure is proposed. A single-ring full R closed chain is used as the unit, and the three-direction geometric deformation is realized by controlling its rotating pair in time sharing. The 4-RRRRRR parallel mobile robot formed by two closed chains orthogonally has four different rolling modes, and each mode can be switched from one to another. Once the mobile robot is overturned and unstable during its movement, it may be deformed into other modes and continue to move. The mechanism′s degree of freedom, gait planning and motion feasibility of each model′s virtual prototype are simulated and analyzed. The results show that the robot can achieve various motion modes and can switch from one to another, thus having a good ability to cross over obstacles.
-
Key words:
- robots /
- degree of freedom /
- deformation /
- model
-
[1] BAI L, GUAN J, CHEN X H, et al. An optional passive/active transformable wheel-legged mobility concept for search and rescue robots[J]. Robotics and Autonomous Systems, 2018, 107(5): 145-155 http://www.onacademic.com/detail/journal_1000040436344210_2fd2.html [2] 崔玉宁, 罗自荣, 尚建忠, 等. 多运动态可重构轮履复合式机器人机械设计[J]. 哈尔滨工业大学学报, 2018, 50(7): 80-86 https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201807014.htmCUI Y N, LUO Z R, SHANG J Z, et al. Machine design of a reconfigurable wheel-track hybrid mobile robot with multi-locomotion[J]. Journal of Harbin Institute of Technology, 2018, 50(7): 80-86 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201807014.htm [3] CHEN S C, HUANG K J, CHEN W H, et al. Quattroped: A leg-wheel transformable robot[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(2): 730-742 doi: 10.1109/TMECH.2013.2253615 [4] OTTAVIANO E, REA P. Design and operation of a 2-DOF leg-wheel hybrid robot[J]. Robotica, 2013, 31(8): 1319-1325 doi: 10.1017/S0263574713000556 [5] 潘希祥, 徐坤, 王耀兵, 等. 具有悬挂系统的轮腿式机器人设计与分析[J]. 机器人, 2018, 40(3): 309-320 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201803007.htmPAN X X, XU K, WANG Y B, et al. Design and analysis of a wheel-legged robot with a suspension system[J]. Robot, 2018, 40(3): 309-320 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201803007.htm [6] 张娜, 沈灵斌, 李晔卓, 等. 自适应可变形轮腿式移动机构[J]. 机械科学与技术, 2020, 39(11): 1705-1712 https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX202011011.htmZHANG N, SHEN L B, LI Y Z, et al. Self-adaptive deformable wheel-legged mobile mechanism[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(11): 1705-1712 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX202011011.htm [7] 朱岩, 王明辉, 李斌, 等. 履带可变形机器人越障性能研究[J]. 机器人, 2015, 37(6): 693-701 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201506007.htmZHU Y, WANG M H, LI B, et al. On obstacle-surmounting performance for a transformable tracked robot[J]. Robot, 2015, 37(6): 693-701 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201506007.htm [8] 田润, 宋轶民, 孙涛, 等. 一种新型轮腿式移动机器人的参数设计与实验研究[J]. 机器人, 2015, 37(5): 538-545 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201505004.htmTIAN R, SONG Y M, SUN T, et al. Parameter design and experiment of a novel wheel-legged mobile robot[J]. Robot, 2015, 37(5): 538-545 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201505004.htm [9] KRAMER J A, MURPHY R R. Endurance testing for safety, security, and rescue robots[J]. Performance Metrics for Intelligent Systems, 2006: 247-254 [10] GARCÍA J M, MARTÍNEZ J L, MANDOW A, et al. Caster-leg aided maneuver for negotiating surface discontinuities with a wheeled skid-steer mobile robot[J]. Robotics and Autonomous Systems, 2017, 91: 25-37 doi: 10.1016/j.robot.2016.12.007 [11] LUO Z R, SHANG J Z, WEI G W, et al. A reconfigurable hybrid wheel-track mobile robot based on Watt Ⅱ six-bar linkage[J]. Mechanism and Machine Theory, 2018, 128: 16-32 doi: 10.1016/j.mechmachtheory.2018.04.020 [12] 李智卿, 马书根, 李斌, 等. 具有自适应能力的轮-履复合变形移动机器人的移动机构与地面约束关系分析[J]. 中国科学: 技术科学, 2011, 41(3): 276-291 https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201103003.htmLI Z Q, MA S G, LI B, et al. Analysis of the relationship between the moving mechanism of human and the ground constraint[J]. Science in China (Series E), 2011, 41(3): 276-291 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201103003.htm [13] 王志瑞, 姚燕安, 张迪, 等. 冗余驱动全R副四面体移动机器人[J]. 机械工程学报, 2019, 55(3): 18-26 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201903002.htmWANG Z R, YAO Y A, ZHANG D, et al. Redundantly actuated tetrahedron mobile robot structured by pure revolute joints[J]. Journal of Mechanical Engineering, 2019, 55(3): 18-26 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201903002.htm [14] LIU C H, YAO Y A, LI R M, et al. Rolling 4R linkages[J]. Mechanism and Machine Theory, 2012, 48: 1-14 doi: 10.1016/j.mechmachtheory.2011.10.005 [15] TIAN Y B, ZHANG D, YAO Y A, et al. A reconfigurable multi-mode mobile parallel robot[J]. Mechanism and Machine Theory, 2017, 111: 39-65 doi: 10.1016/j.mechmachtheory.2017.01.003 [16] 刘超, 巢鑫迪, 姚燕安. 多模式空间6R地面移动机构[J]. 机械工程学报, 2019, 55(23): 38-47 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201923004.htmLIU C, CHAO X D, YAO Y A. Multi-mode spatial 6R ground mobile mechanism[J]. Journal of Mechanical Engineering, 2019, 55(23): 38-47 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201923004.htm [17] WEI X Z, TIAN Y B, WEN S S. Design and locomotion analysis of a novel modular rolling robot[J]. Mechanism and Machine Theory, 2019, 133: 23-43 doi: 10.1016/j.mechmachtheory.2018.11.004 [18] 荀致远, 关永瀚, 席利贺, 等. 空间三正交平行四边形滚动机构[J]. 机械工程学报, 2015, 51(17): 15-24 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201517003.htmXUN Z Y, GUAN Y H, XI L H, et al. Three spatial-crossed parallelograms rolling mechanism[J]. Journal of Mechanical Engineering, 2015, 51(17): 15-24 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201517003.htm [19] LI Y Z, YAO Y A, HE Y Y. Design and analysis of a multi-mode mobile robot based on a parallel mechanism with branch variation[J]. Mechanism and Machine Theory, 2018, 130: 276-300 doi: 10.1016/j.mechmachtheory.2018.07.018 [20] ZHANG C Y, WAN Y, ZHANG D, et al. A new mathematical method to study the singularity of 3-RSR multimode mobile parallel mechanism[J]. Mathematical Problems in Engineering, 2019, 2019: 1327167 http://www.researchgate.net/publication/332356249_A_New_Mathematical_Method_to_Study_the_Singularity_of_3-RSR_Multimode_Mobile_Parallel_Mechanism [21] 何姘颖. 多模式两轮移动机器人的设计与研究[D]. 北京: 北京交通大学, 2019HE P Y. Design and mobility analysis of a multi-mode two-wheel mobile robot[D]. Beijing: Beijing Jiaotong University, 2019 (in Chinese) [22] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 2版. 北京: 高等教育出版社HUANG Z, ZHAO Y S, ZHAO T S. Advanced spatial mechanism[M]. 2nd ed. Beijing: Higher Education Press, 2014 (in Chinese) [23] 刘香玉, 张春燕, 谢明娟, 等. 一种可重构多模式步滚移动机器人[J]. 机械传动, 2019, 43(6): 158-164 https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201906030.htmLIU X Y, ZHANG C Y, XIE M J, et al. A reconfigurable multi-mode walking-rolling mobile robot[J]. Journal of Mechanical Transmission, 2019, 43(6): 158-164 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201906030.htm -

 下载:
下载:





























 点击查看大图
点击查看大图
图(29) / 表(2)
计量
- 文章访问数: 142
- HTML全文浏览量: 42
- PDF下载量: 22
- 被引次数: 0
