




Development of Model Predictive Control Strategy of an Active Vehicle Anti-roll Stabilizer
-
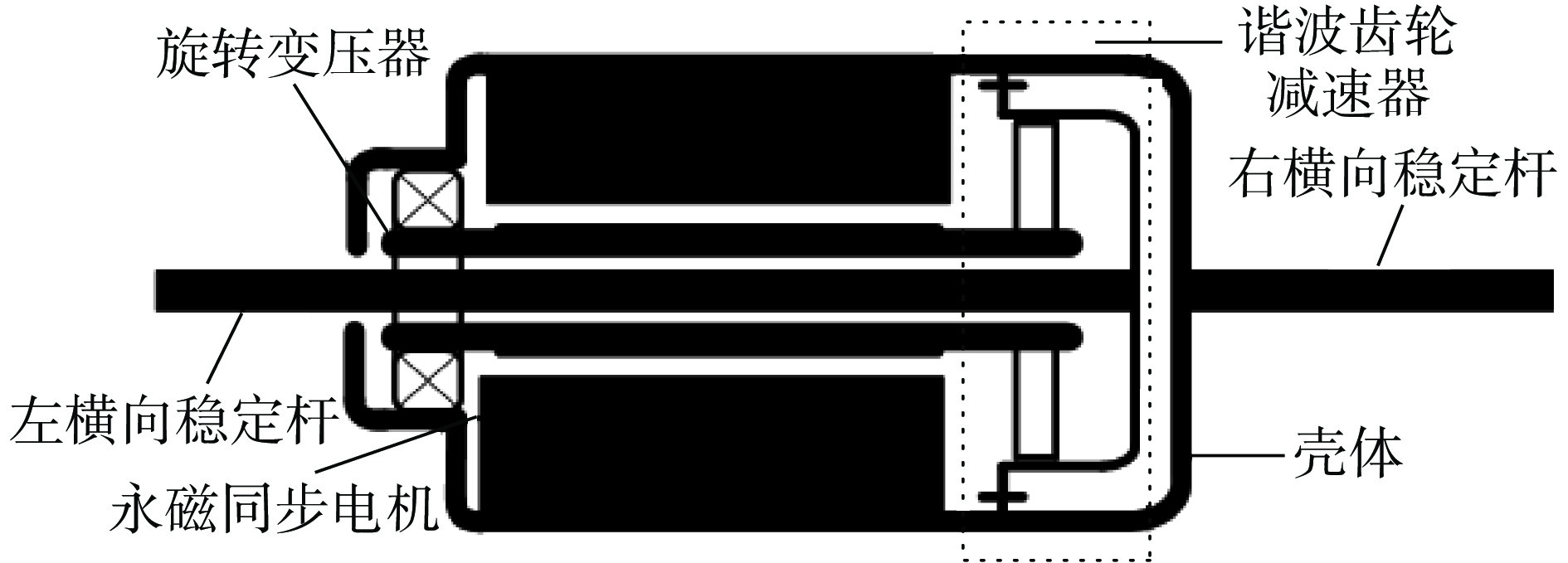
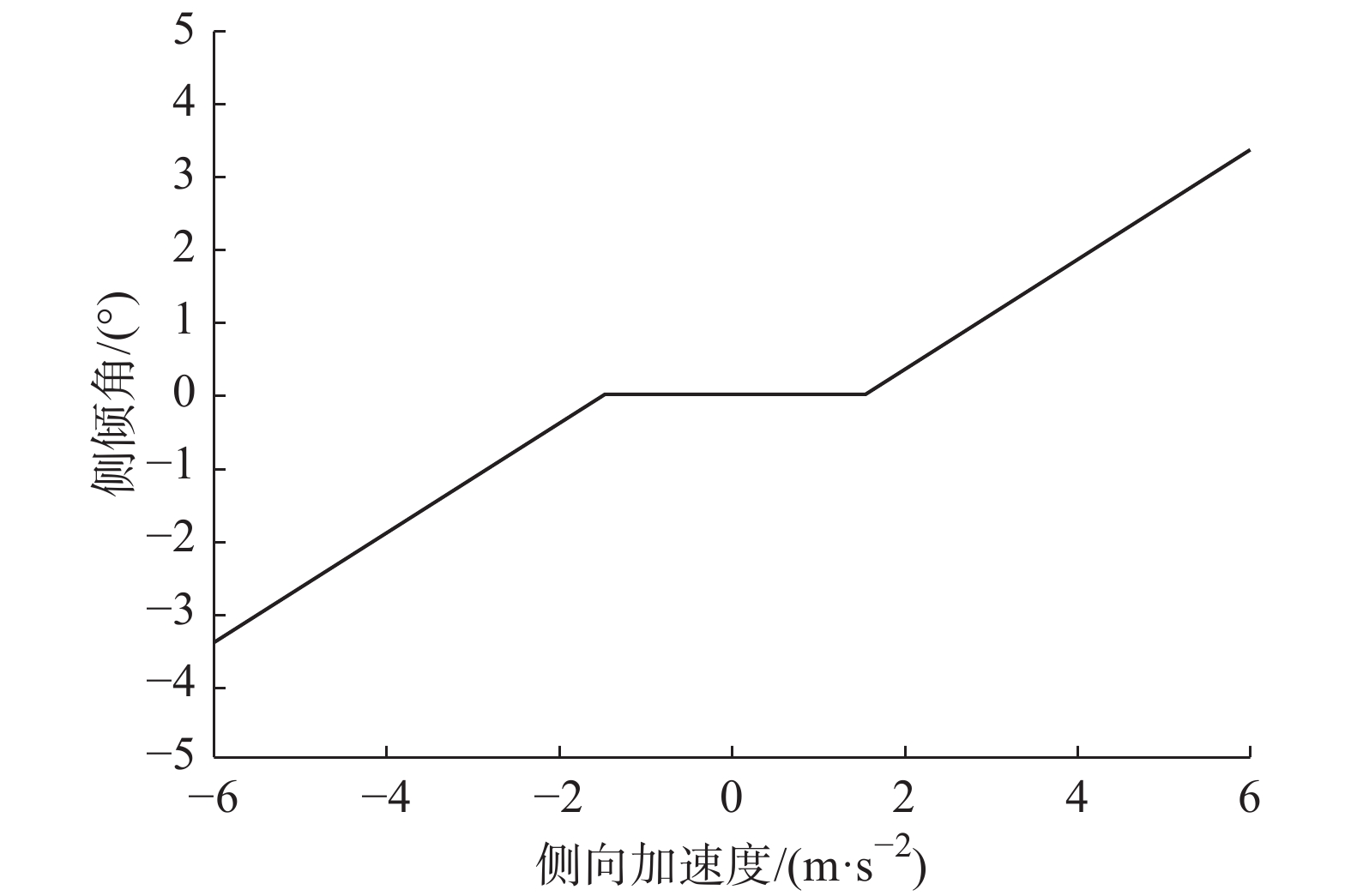
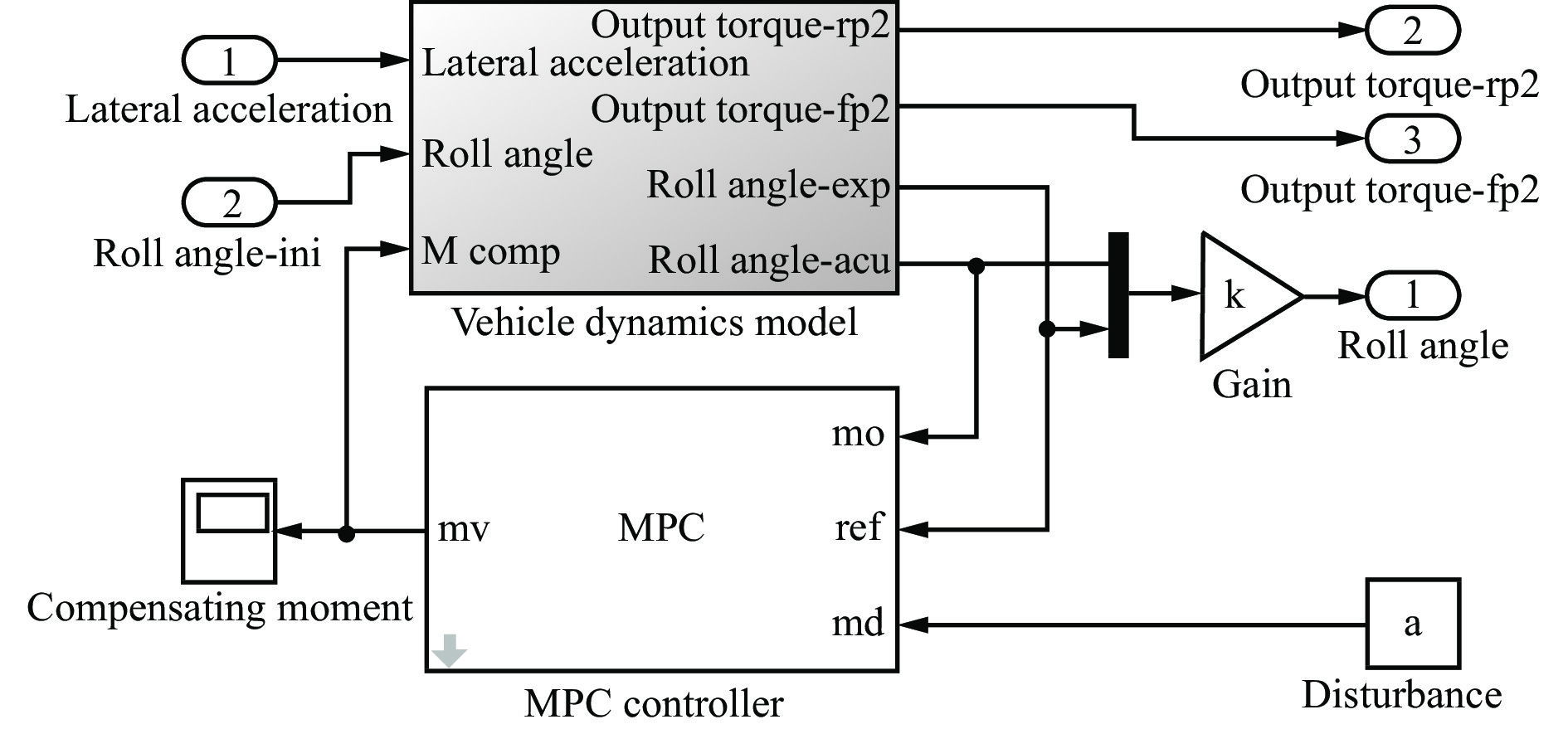
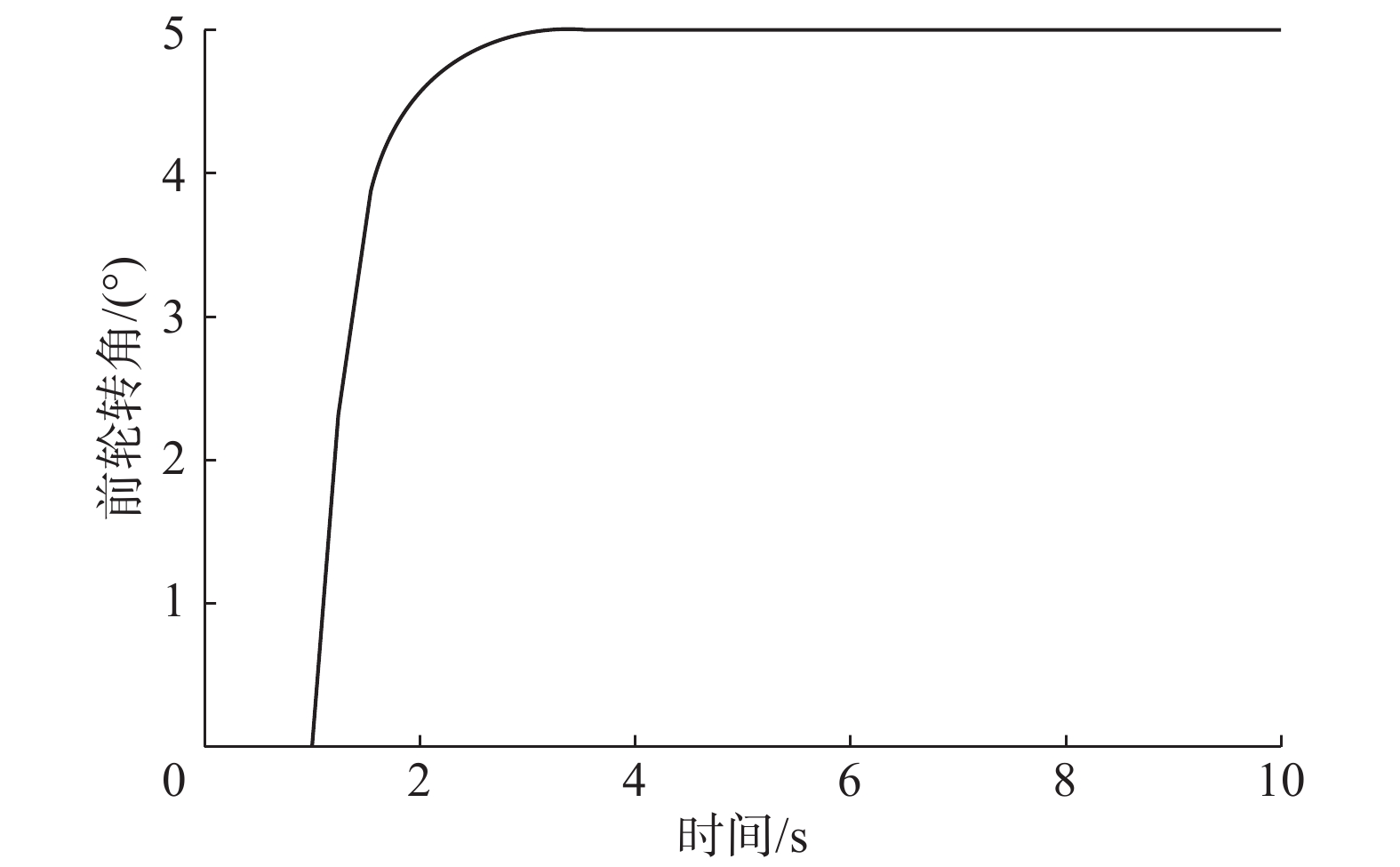
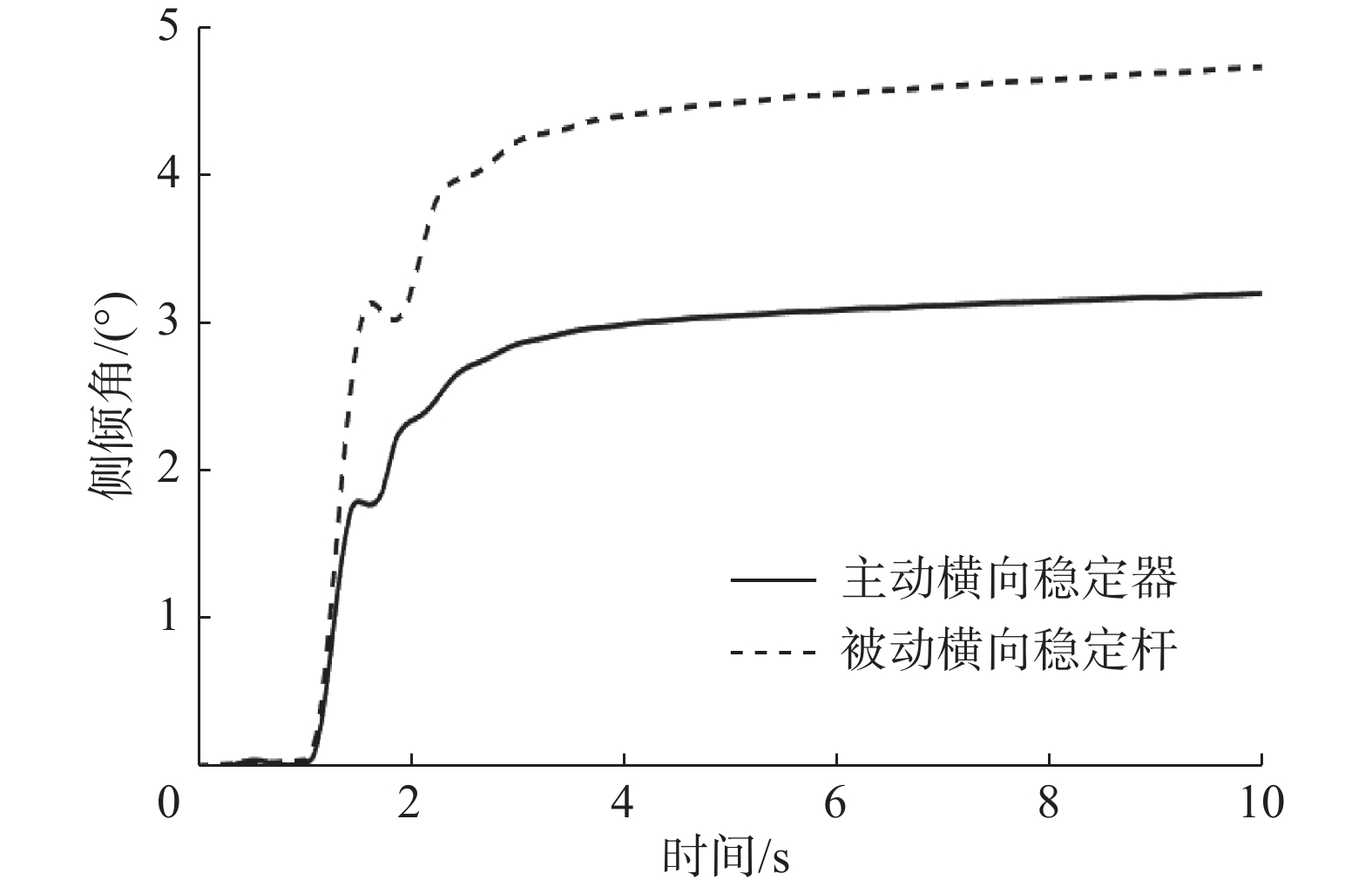
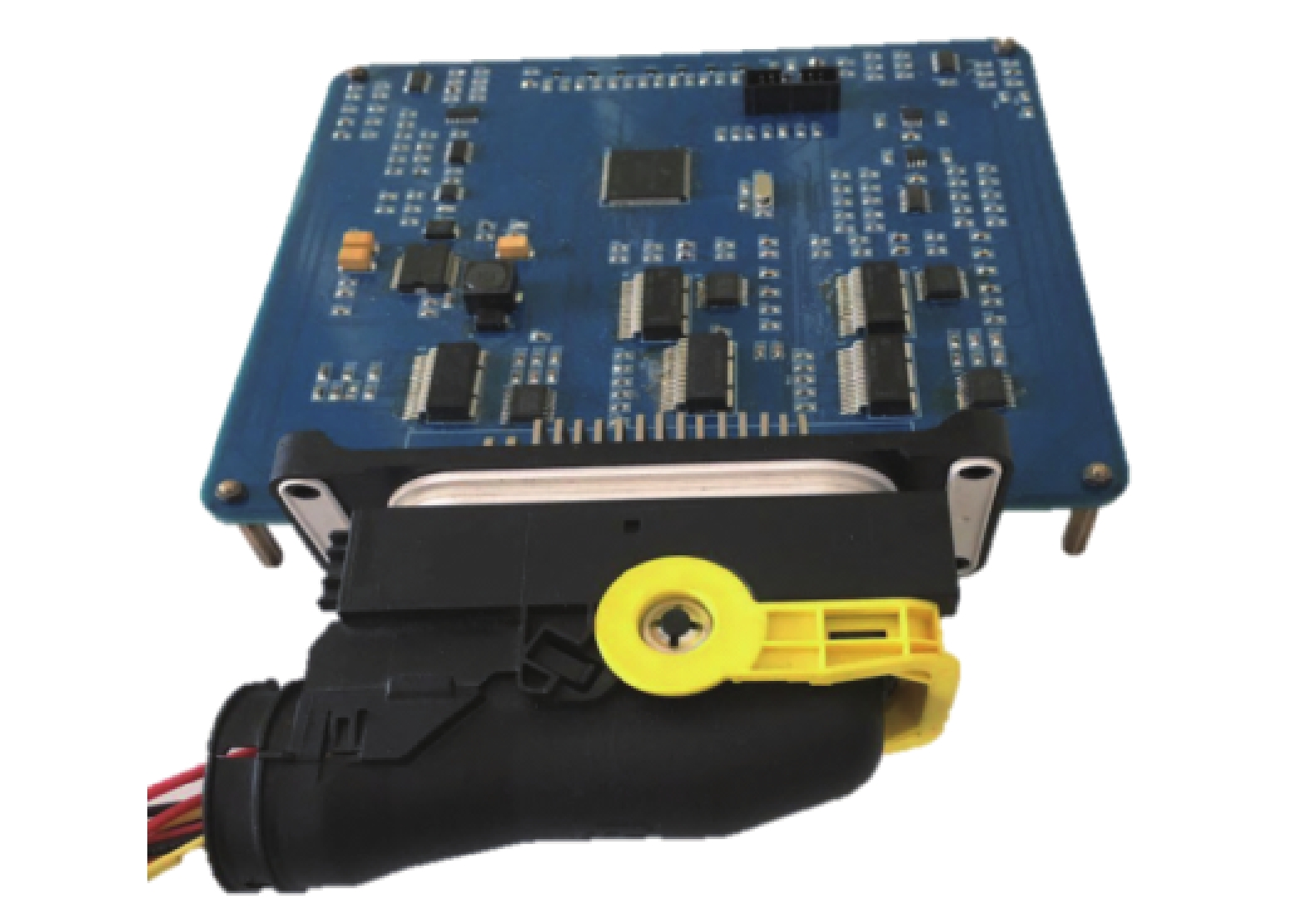
摘要: 为进一步提升高速行驶车辆侧倾稳定性,本文以永磁同步电机式主动横向稳定器为被控对象,设计该电动式主动横向稳定器模型预测控制器及其电子控制单元,并完成相关离线仿真和硬件在环性能试验。首先利用MATLAB/Simulink搭建九自由度整车动力学模型,并利用模型预测控制方法,构建电动式主动横向稳定器控制策略模型,然后设计基于英飞凌32位TC275主控芯片的电动式主动横向稳定器电子控制单元,利用自行开发的电动式主动横向稳定器性能试验台,分别在转向盘角阶跃工况和鱼钩工况下验证了电动式主动横向稳定器模型预测控制策略有效性。相关仿真和台架试验结果表明,电动式主动横向稳定器模型预测控制策略可有效提高车辆抗侧倾能力。Abstract: In order to further improve the roll stability of high-speed vehicles, the model predictive controller and its electronic control unit of the active anti-roll stabilizer based on a permanent magnet synchronous motor (PMSM) are designed, and the related off-line and hardware-in-the-loop performance tests are conducted in this paper. Firstly, a nine-degree-of-freedom vehicle dynamics model is built with MATLAB/Simulink, and a model predictive control method is applied to build the control strategy model of the electric active anti-roll stabilizer. Then, the electronic control unit of the electric active anti-roll stabilizer based on the Infineon 32-bit Tricore 275 control chip is designed. The validity of the model predictive control strategy of the electric active anti-rolla stabilizer is validated under the steering wheel angle step test and the fishhook test respectively with the developed test bench. The results of relevant simulation and bench test show that the model predictive control strategy of the electric active anti-roll stabilizer can effectively improve the anti-roll ability of the vehicle.
-
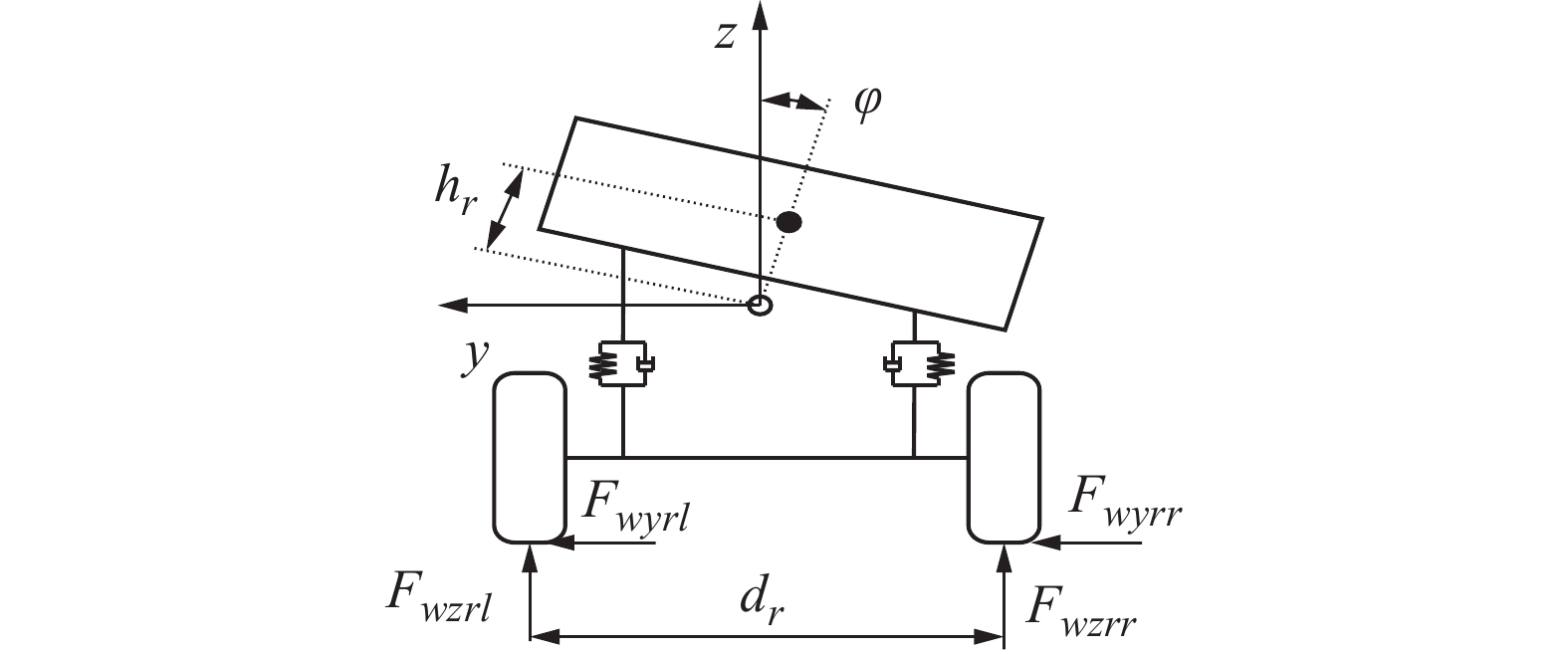
表 2 整车动力学模型主要参数
m/kg 1700 ms/kg 1520 lf(lr)/m 1.304(1.546) hr/m 0.445 df(dr)/m 1.575(1.590) hp/m 0.400 Ix/(kg·m2) 744 Iz/(kg·m2) 3048 Iy/(kg·m2) 2603 mwfi(mwri)/kg 49.65(40.35)  下载: 导出CSV
下载: 导出CSV
-
[1] 张立军, 张宇, 赵亮. 基于悬架刚柔耦合模型的汽车平顺性[J]. 农业机械学报, 2008, 39(8): 28-32ZHANG L J, ZHANG Y, ZHAO L. Ride comfort based on the rigid-flexible coupling model of suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(8): 28-32 (in Chinese) [2] 周兵, 吕绪宁, 范璐, 等. 主动悬架与主动横向稳定杆的集成控制[J]. 中国机械工程, 2014, 25(14): 1978-1983 doi: 10.3969/j.issn.1004-132X.2014.14.026ZHOU B, LÜ X N, FAN L, et al. Integrated control of active suspension system and active roll stabilizer[J]. China Mechanical Engineering, 2014, 25(14): 1978-1983 (in Chinese) doi: 10.3969/j.issn.1004-132X.2014.14.026 [3] 周兵, 颜丙超, 吕绪宁. 基于主动横向稳定杆和AFS的车辆稳定性协调控制[J]. 振动与冲击, 2015, 34(18): 111-117ZHOU B, YAN B C, LÜ X N. Coordinated control of vehicle yaw and roll stability based on ARS and AFS[J]. Journal of Vibration and Shock, 2015, 34(18): 111-117 (in Chinese) [4] 赵福民. 液压马达式汽车主动稳定杆系统建模、控制与实验研究[D]. 合肥: 合肥工业大学, 2017.ZHAO F M. On the modeling, control and experiment of the automobile active stabilizer bar system with hydraulic motor[D]. Hefei: Hefei University of Technology, 2017 (in Chinese). [5] MIÈGE A J P, CEBON D. Active roll control of an experimental articulated vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2005, 219(6): 791-806 doi: 10.1243/095440705X28385 [6] BUMA S, OOKUMA Y, TANEDA A, et al. Design and development of electric active stabilizer suspension system[J]. Journal of System Design and Dynamics, 2010, 4(1): 61-76 doi: 10.1299/jsdd.4.61 [7] OHTA Y, KATO H, YAMADA D, et al. Development of an electric active stabilizer system based on robust design[C]//SAE 2006 World Congress & Exhibition. Detroit, USA: SAE, 2006: 8348-8353. [8] SUZUKI S, BUMA S, URABABA S, et al. Development of electric active stabilizer suspension system[C]//SAE 2006 World Congress & Exhibition. Detroit, USA: SAE, 2006: 16057-16063. [9] MUNIANDY V, SAMIN P M, JAMALUDDIN H. Application of a self-tuning fuzzy PI-PD controller in an active anti-roll bar system for a passenger car[J]. Vehicle System Dynamics, 2015, 53(11): 1641-1666 doi: 10.1080/00423114.2015.1073336 [10] PACEJKA H B. Tyre and vehicle dynamics[M]. 2nd ed. Amsterdam: Elsevier, 2006: 172-215. [11] 杨凡, 周兵, 李栋升. 主动前轮转向系统仿真分析[C]//2008年中国汽车工程学会年会论文集. 天津: 中国汽车工程学会, 2008: 692-695.YANG F, ZHOU B, LI D S. Simulation analysis of active front wheel steering system[C]//Proceedings of the Annual Meeting of China Society of Automotive Engineering, Tianjin, China: SAE-China, 2008: 692-695 [12] 张立军, 张天侠. 车辆四轮相关路面非平稳随机输入通用时频模型[J]. 振动与冲击, 2008, 27(7): 75-78 doi: 10.3969/j.issn.1000-3835.2008.07.017ZHANG L J, ZHANG T X. General nonstationary random input model of road surface with four wheels correlated[J]. Journal of Vibration and Shock, 2008, 27(7): 75-78 (in Chinese) doi: 10.3969/j.issn.1000-3835.2008.07.017 [13] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2016: 1-4.TANG R Y. Modern permanent magnet machines-theory and design[M]. Beijing: China Machine Press, 2016: 1-4 (in Chinese). [14] MIZUTA Y, SUZUMURA M, MATSUMOTO S. Ride comfort enhancement and energy efficiency using electric active stabiliser system[J]. Vehicle System Dynamics, 2010, 48(11): 1305-1323 doi: 10.1080/00423110903456909 [15] HU K, YUAN J Q. Multi-model predictive control method for nuclear steam generator water level[J]. Energy Conversion and Management, 2008, 49(5): 1167-1174 doi: 10.1016/j.enconman.2007.09.006 [16] 陈龙, 朱斌, 孙晓东, 等. 基于模型预测控制的多电机驱动系统能量最优分配策略[J]. 农业机械学报, 2018, 49(10): 403-409 doi: 10.6041/j.issn.1000-1298.2018.10.047CHEN L, ZHU B, SUN X D, et al. Optimal allocation strategy for multi-motor drive system based on model predictive control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(10): 403-409 (in Chinese) doi: 10.6041/j.issn.1000-1298.2018.10.047 [17] 郑泽东, 王奎. 采用模型预测控制的交流电机电流控制器[J]. 电工技术学报, 2013, 28(11): 118-123 doi: 10.3969/j.issn.1000-6753.2013.11.016ZHENG Z D, WANG K. Current controller for ac motors using model predictive control[J]. Transactions of China Electrotechnical Society, 2013, 28(11): 118-123 (in Chinese) doi: 10.3969/j.issn.1000-6753.2013.11.016 [18] 宗长富, 陈国迎, 梁赫奇, 等. 基于模型预测控制的汽车底盘协调控制策略[J]. 农业机械学报, 2011, 42(2): 1-7ZONG C F, CHEN G Y, LIANG H Q, et al. Vehicle chassis coordination control strategy based on model predictive control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2): 1-7 (in Chinese) [19] WANG L P. Model predictive control system design and implementation using MATLAB[M]. London: Springer, 2009: 99-105. [20] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. GB/T 6323—2014 汽车操纵稳定性试验方法[S]. 北京: 中国标准出版社, 2014.General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration. GB/T 6323-2014 Controllability and stability test procedure for automobile[S]. Beijing: Standards Press of China, 2014 (in Chinese). -


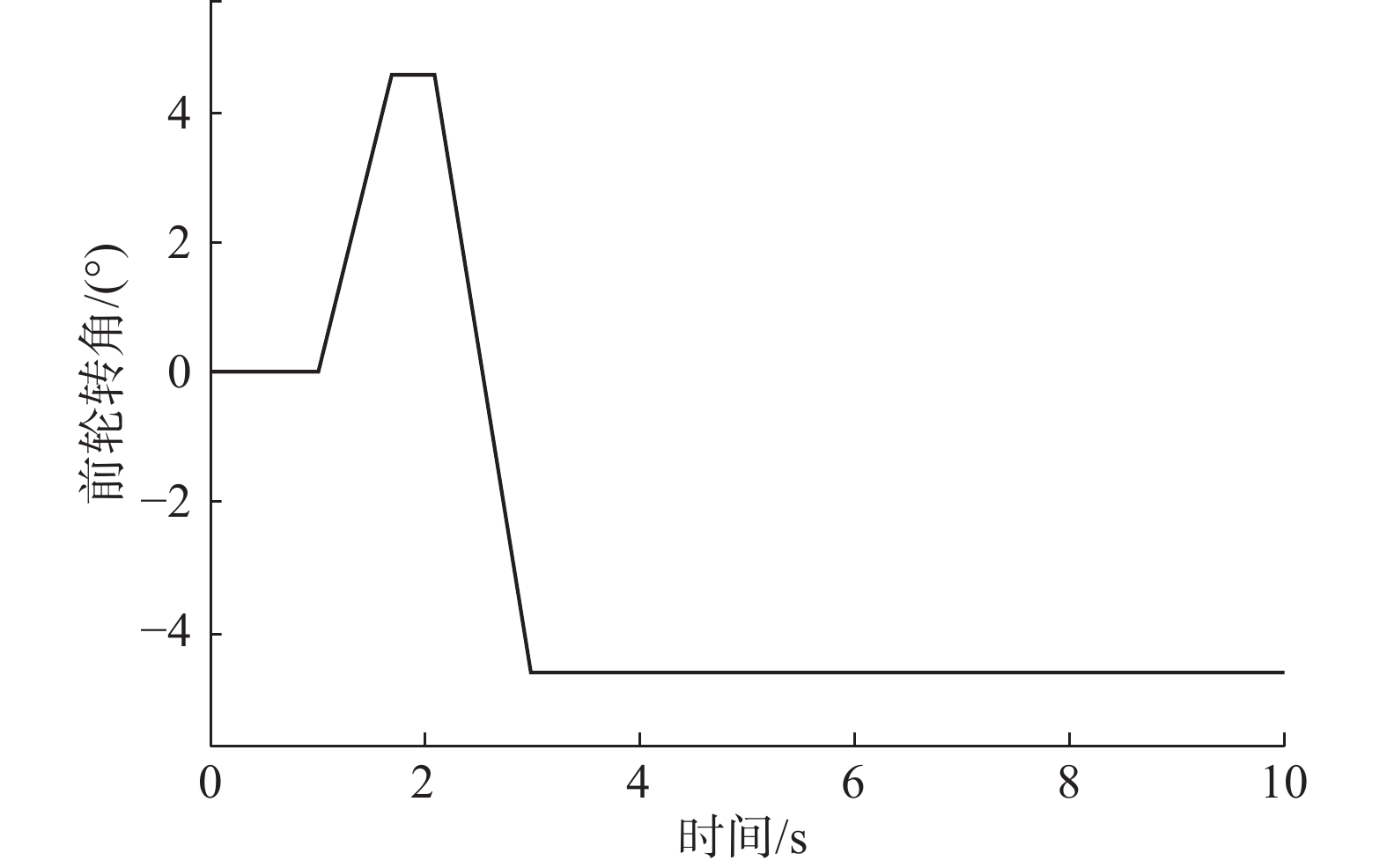
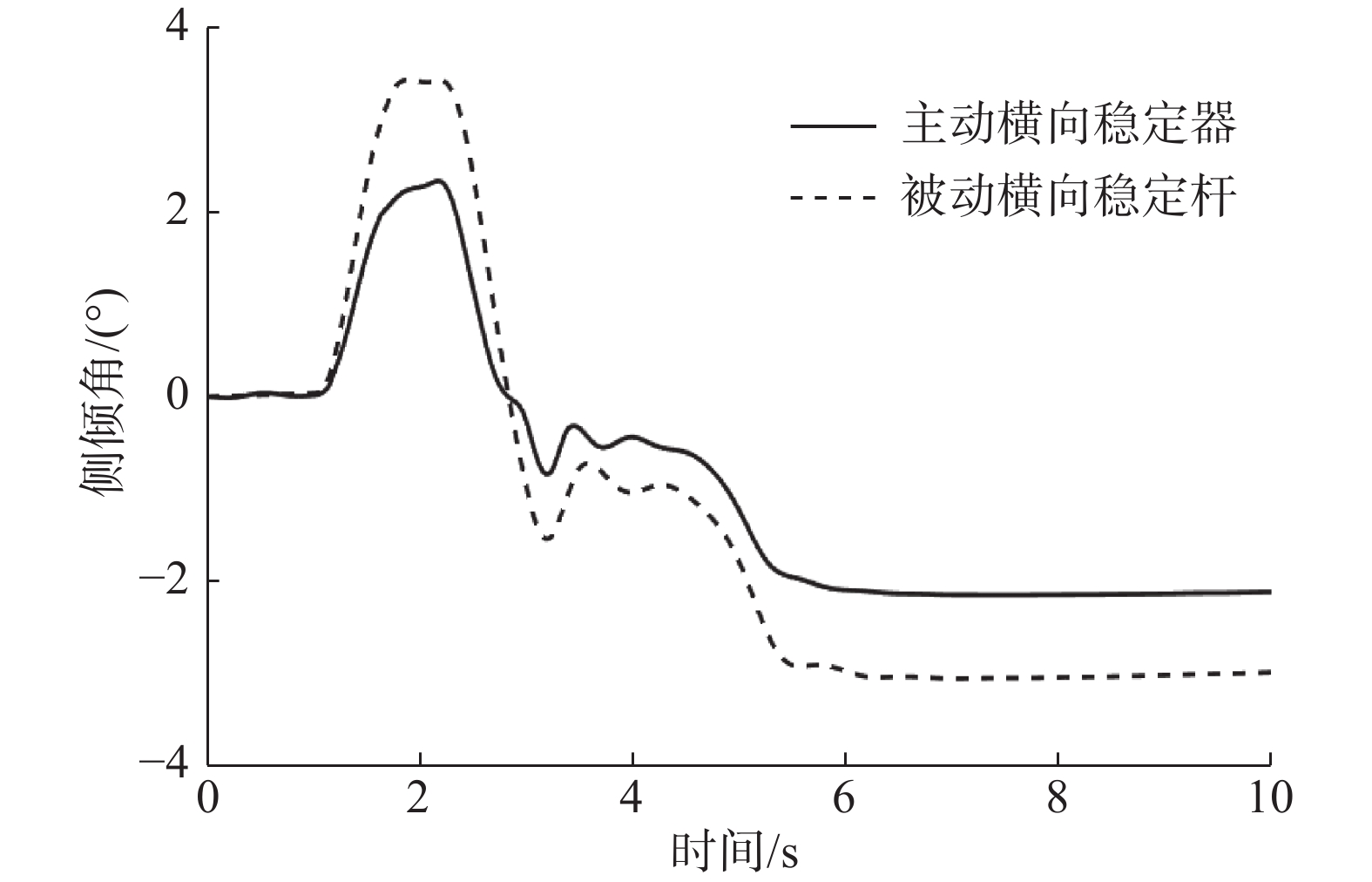



 点击查看大图
点击查看大图

图(18) / 表(2)
计量
- 文章访问数: 175
- HTML全文浏览量: 74
- PDF下载量: 61
- 被引次数: 0
