




Research of Tension Distribution Solution for Redundantly Constrained Cable-driven Parallel Robots
-
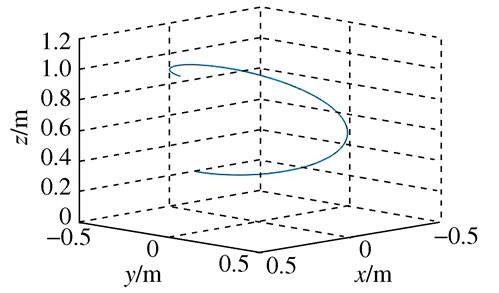
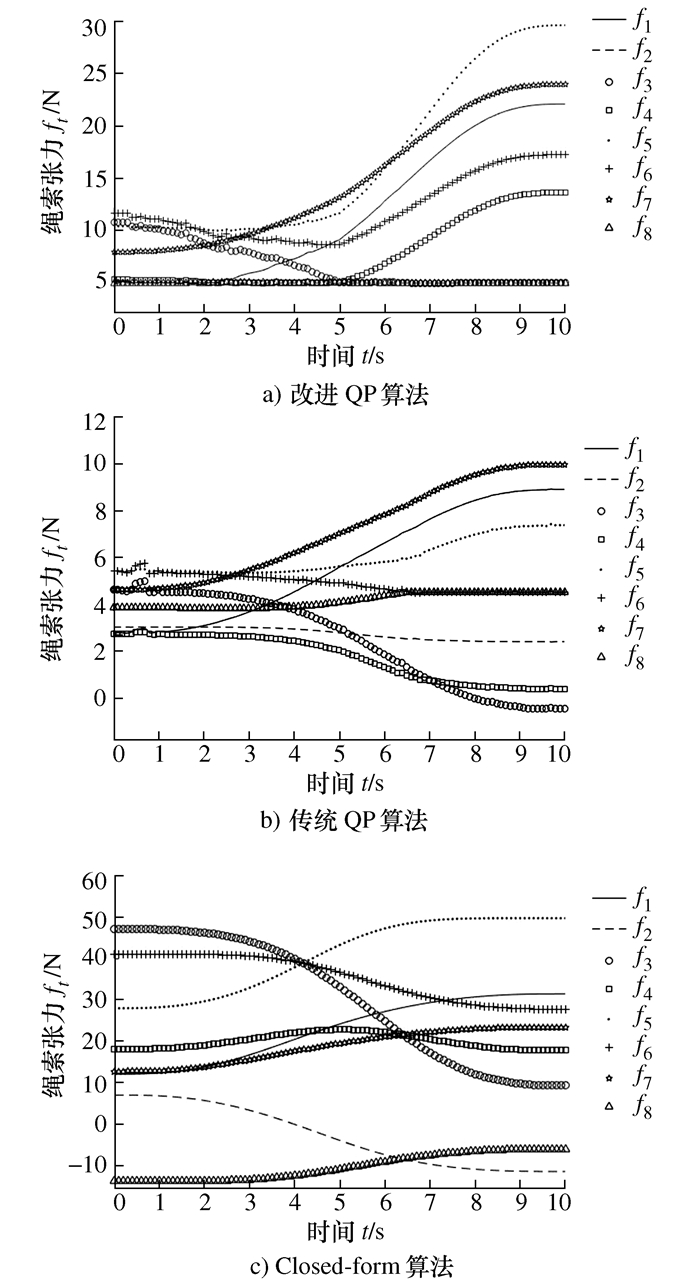
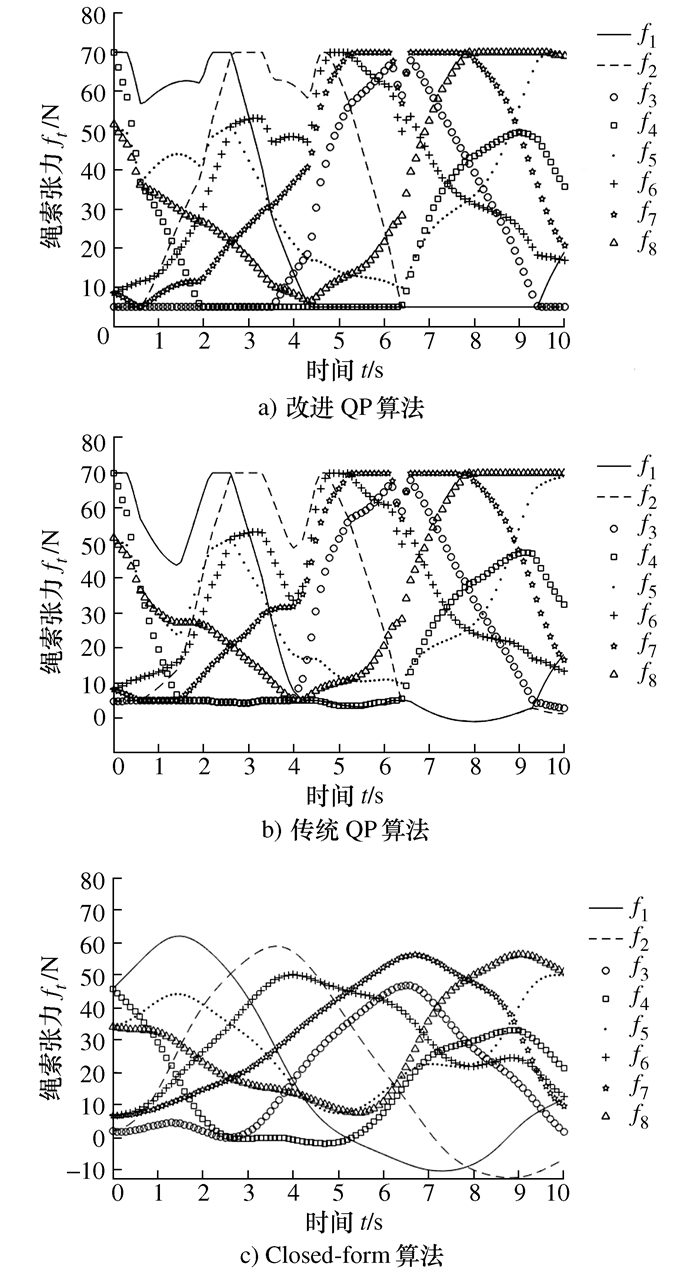
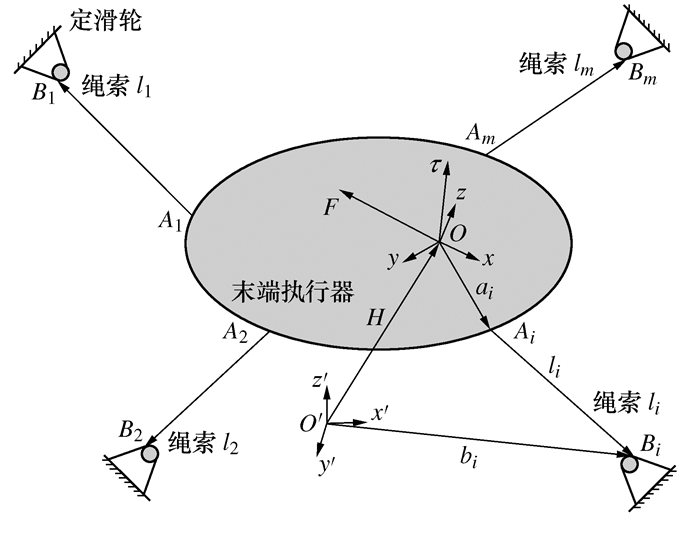
摘要: 提出一种改进的二次规划方法求解冗余约束绳驱并联机器人的绳索张力分配问题。建立一般冗余约束绳驱并联机器人运动学模型,对机构进行受力分析,得到一般冗余约束绳驱并联机器人的动力学方程。结合力封闭的思想,引入参考力的概念,改进传统的二次规划方法,得到了适用于冗余约束绳驱并联机器人的绳索张力分配优化模型。以八绳六自由度绳驱并联机器人为例,利用MATLAB/Simulink/xPC工具进行实时仿真实验,实现该并联机器人在两种典型空间运动轨迹下的动态运行,分别运用改进的二次规划算法、传统二次规划算法和Closed-form算法求解绳索张力分配问题,比较3种张力分配算法的仿真结果,验证了改进的二次规划算法求解绳索张力分配的合理性。Abstract: An improved quadratic programming method is proposed to deal with the problem of tension distribution for redundantly constrained cable-driven parallel robots. The kinematics model of the general redundantly constrained cable-driven parallel robot is established, and the dynamic equations of the general redundantly constrained cable-driven parallel robot are obtained after the force analysis of the mechanism. Combined with the idea of closed-form force, the concept of reference force is introduced, and the traditional quadratic programming method is improved to obtain the optimization model of cable tension distribution suitable for redundantly constrained cable-driven parallel robots. Taken a 6-DOF cable-driven parallel robot with eight cables as an example, MATLAB/Simulink/xPC tool is used for real-time simulation experiments to achieve dynamic operation of the parallel robot under two typical spatial motion trajectories. The improved quadratic programming algorithm, the traditional quadratic programming algorithm and the closed-form algorithm are used to solve the problem of tension distribution respectively. Comparing the simulation results of these three tension distribution algorithms, it is verified that the improved quadratic programming algorithm for solving the problem of tension distribution is reasonable.
-
表 1 并联机器人的几何参数
m 绳索i 向量ai 向量bi 1 [0.1, 0.05, -0.05]T [0.5, 0.5, 0]T 2 [-0.1, 0.05, -0.05]T [-0.5, 0.5, 0]T 3 [-0.1, -0.05, -0.05]T [-0.5, -0.5, 0]T 4 [0.1, -0.05, -0.05]T [0.5, -0.5, 0]T 5 [0.1, 0.05, 0.05]T [0.5, 0.5, 1.2]T 6 [-0.1, 0.05, 0.05]T [-0.5, 0.5, 1.2]T 7 [-0.1, -0.05, 0.05]T [-0.5, -0.5, 1.2]T 8 [0.1, -0.05, 0.05]T [0.5, -0.5, 1.2]T  下载: 导出CSV
下载: 导出CSV
-
[1] JAMSHIDIFAR H, KHOSRAVANI S, FIDAN B, et al. Vibration decoupled modeling and robust control of redundant cable-driven parallel robots[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 690-701 doi: 10.1109/TMECH.2018.2793578 [2] CAVERLY R J, FORBES J R. Dynamic modeling and noncollocated control of a flexible planar cable-driven manipulator[J]. IEEE Transactions on Robotics, 2014, 30(6): 1386-1397 doi: 10.1109/TRO.2014.2347573 [3] POTT A, MÜTHERICH H, KRAUS W, et al. IPAnema: a family of cable-driven parallel robots for industrial applications[C]//Bruckmann T, Pott A. Cable-Driven Parallel Robots. Berlin, Germany: Springer-Verlag Press, 2013: 119-134 [4] FORTIN-CÔTÉ A, CARDOU P, GOSSELIN C. An admittance control scheme for haptic interfaces based on cable-driven parallel mechanisms[C]//2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China: IEEE Press, 2014: 819-825 [5] BARNETT E, GOSSELIN C. Large-scale 3D printing with a cable-suspended robot[J]. Additive Manufacturing, 2015, 7: 27-44 doi: 10.1016/j.addma.2015.05.001 [6] OUYANG B, SHANG W W. Rapid optimization of tension distribution for cable-driven parallel manipulators with redundant cables[J]. Chinese Journal of Mechanical Engineering, 2016, 29(2): 231-238 doi: 10.3901/CJME.2015.1120.137 [7] 苏宇, 仇原鹰, 王龙, 等. 高速绳牵引并联摄像机器人冗余驱动力优化求解[J]. 西安电子科技大学学报, 2014, 41(2): 90-96 https://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201402016.htmSU Y, QIU Y Y, WANG L, et al. Optimization of redundant driving force for high-speed cable-driven parallel camera robots[J]. Journal of Xidian University, 2014, 41(2): 90-96 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201402016.htm [8] SONG D, ZHANG L X, XUE F. Configuration optimization and a tension distribution algorithm for cable-driven parallel robots[J]. IEEE Access, 2018, 6: 33928-33940 doi: 10.1109/ACCESS.2018.2841988 [9] SU Y, QIU Y Y, LIU P. Optimal cable tension distribution of the high-speed redundant driven camera robots considering cable sag and inertia effects[J]. Advances in Mechanical Engineering, 2015, 6: 729020 http://smartsearch.nstl.gov.cn/paper_detail.html?id=39b595579dfb783859c6495688451b71 [10] POTT A, BRUCKMANN T, MIKELSONS L. Closed-form force distribution for parallel wire robots[C]//Kecskemethy A, Mueller A. Computational Kinematics. Berlin, Germany: Springer Press, 2009: 25-34 [11] POTT A, MIERMEISTER P. Workspace and interference analysis of cable-driven parallel robots with an unlimited rotation axis[C]//Lenarcˇicˇ J, Merlet J P. Advances in Robot Kinematics. Cham: Springer, 2016: 341-350 [12] 张卓, 梁艳阳, 刘宏伟, 等. 典型空间轨迹的张力优化算法研究[J]. 机械设计与制造, 2016(4): 35-38, 43 https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201604010.htmZHANG Z, LIANG Y Y, LIU H W, et al. The research of optimal tension distribution methods based on typical trajectory[J]. Machinery Design & Manufacture, 2016(4): 35-38, 43 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201604010.htm [13] GOUTTEFARDE M, LAMAURY J, REICHERT C, et al. A versatile tension distribution algorithm for n-DOF parallel robots driven by n+2 cables[J]. IEEE Transactions on Robotics, 2015, 31(6): 1444-1457 doi: 10.1109/TRO.2015.2495005 [14] RASHEED T, LONG P, MARQUEZ-GAMEZ D, et al. Tension distribution algorithm for planar mobile cable-driven parallel robots[C]//Gosselin C, Cardou P, Bruckmann T, eds. Cable-Driven Parallel Robots. Berlin, Germany: Springer International Publishing Press, 2018: 268-279. [15] LIM W B, YEO S H, YANG G. Optimization of tension distribution for cable-driven manipulators using tension-level index[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(2): 676-683 doi: 10.1109/TMECH.2013.2253789 [16] LI H, ZHANG X Y, YAO R, et al. Optimal Force distribution based on slack rope model in the incompletely constrained cable-driven parallel mechanism of FAST telescope[C]// Bruckmann T, Pott A. Cable-Driven Parallel Robots. Berlin, Germany: Springer-Verlag Press, 2013: 87-102 -


 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 253
- HTML全文浏览量: 102
- PDF下载量: 45
- 被引次数: 0
