




Design and Analysis of a Bio-inspired Tracked Wall-climbing Robot with Spiny Grippers
-
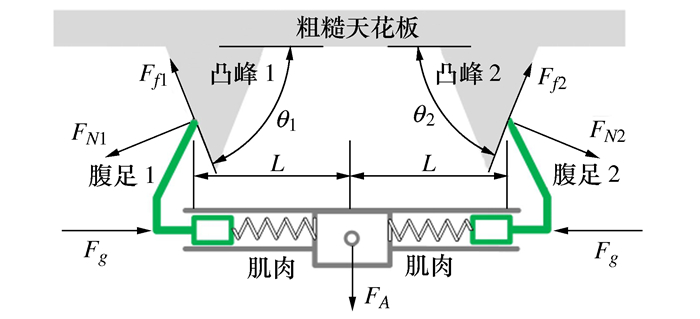
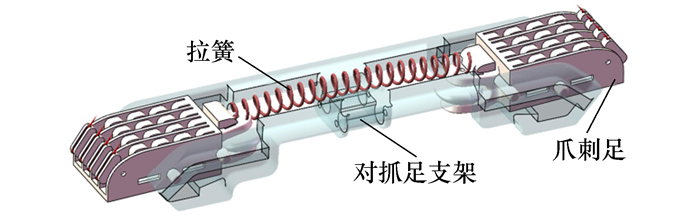
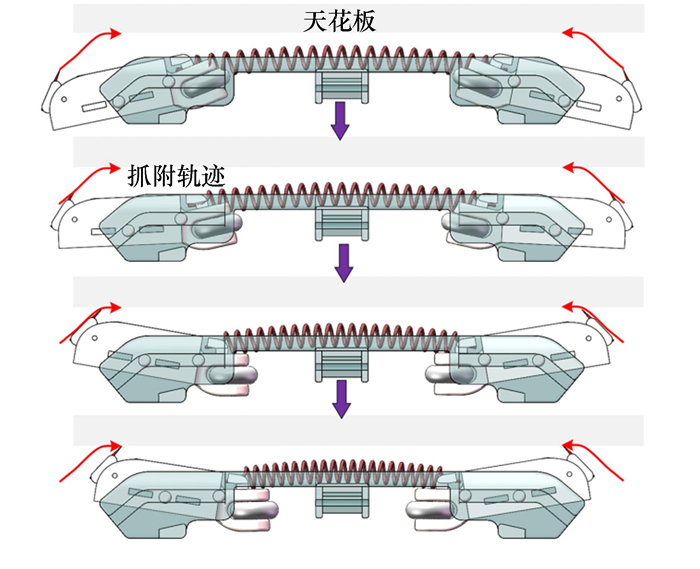
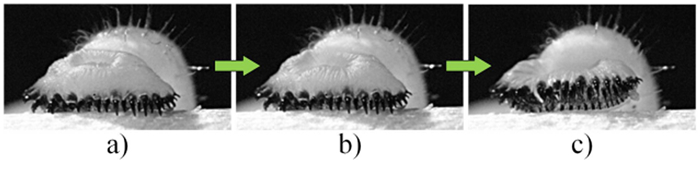
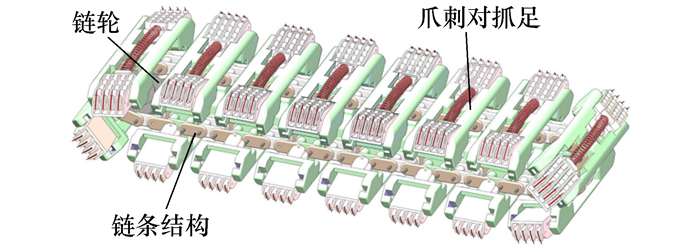
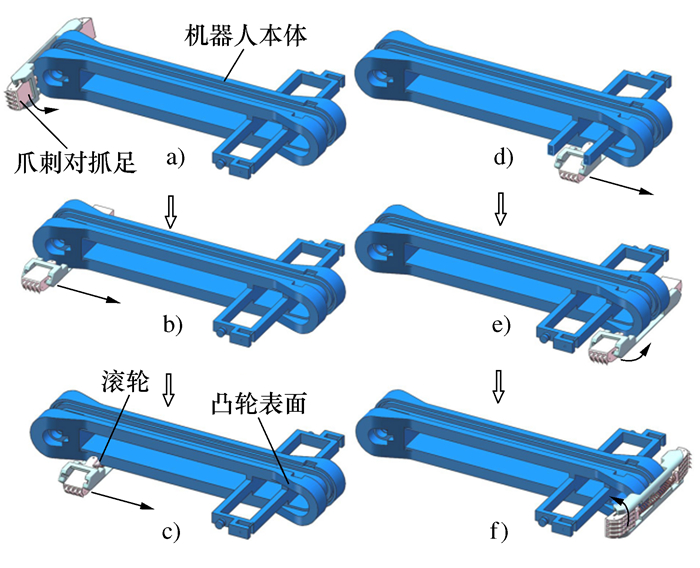
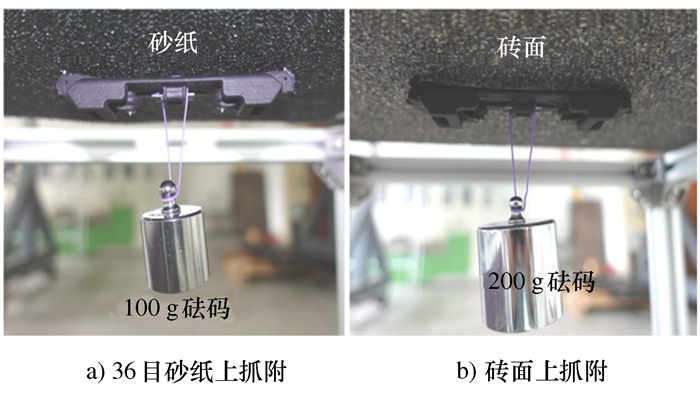
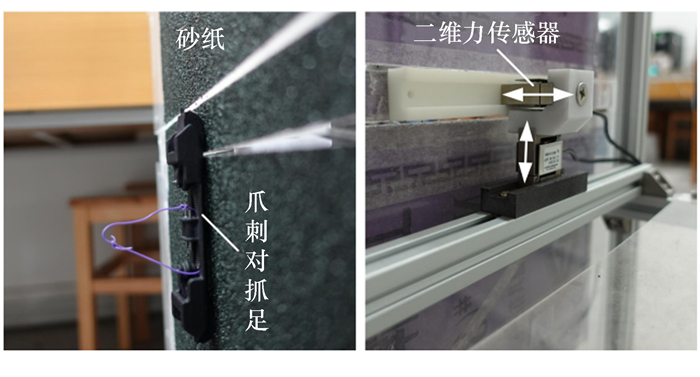
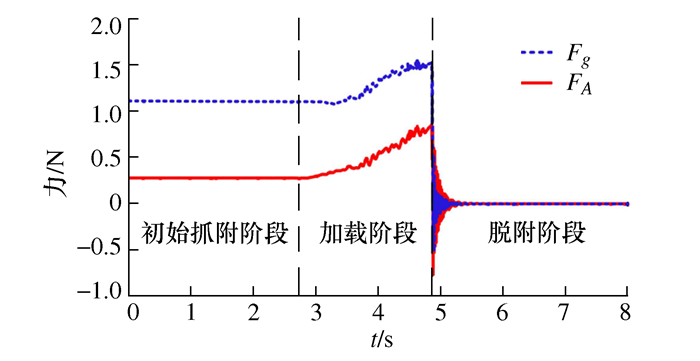
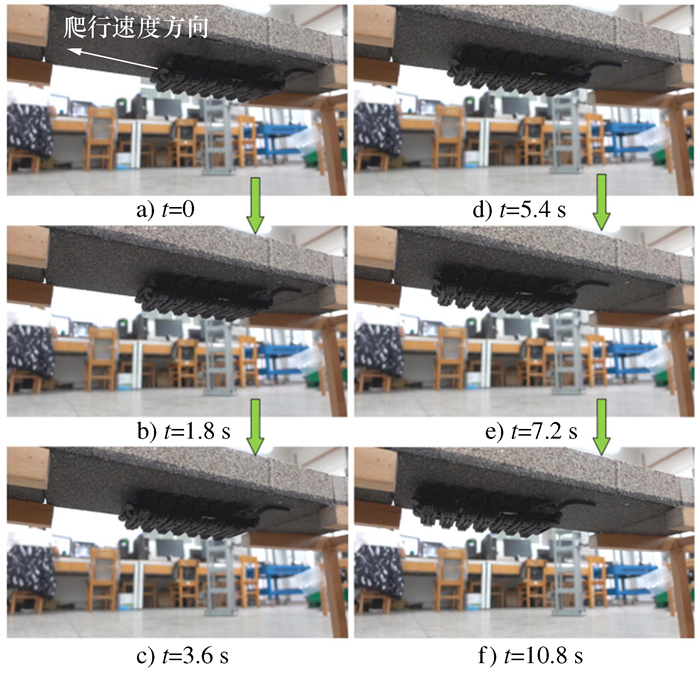
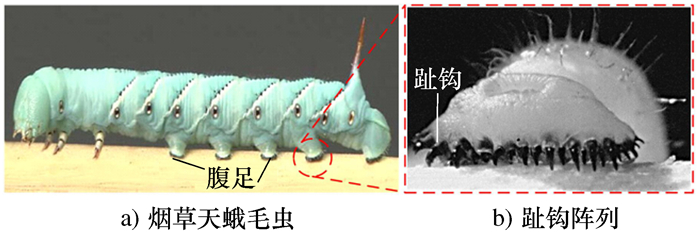
摘要: 针对粗糙壁面和天花板上爬行的应用需求,基于毛虫腹足趾钩阵列对抓机理,提出了一种仿生爪刺对抓式履带爬壁机器人。该机器人履带由数十个仿生爪刺对抓足通过链条结构连接构成,仿生爪刺对抓足与机器人本体构成凸轮机构,模仿毛虫爬行过程中腹足趾钩的抓附、脱附动作,能够实现在粗糙天花板和壁面上稳定爬行。建立了毛虫腹足趾钩阵列对抓机理模型,仿生设计了爪刺对抓式履带爬壁机器人,分析了机器人爬行过程中仿生爪刺对抓足的抓附、脱附动作,并在粗糙天花板和壁面上对机器人样机开展了爬行实验。Abstract: Aiming at the application requirements of climbing on rough walls and ceilings, based on the gripping mechanism of caterpillar preleg crochets, a bio-inspired tracked wall-climbing robot with spiny grippers is developed. The robot's tread consists of dozens of spiny grippers connected by chain structure, and constitutes a cam mechanism with the robot body, which is used to mimic the gripping and releasing movements of the crochets of the ctaterpillar preleg in climbing. The robot can climb steadily on rough walls and ceilings. The gripping mechanism model for the caterpillar preleg crochets is established, the bio-inspired tracked wall-climbing robot is designed, and the gripping and releasing movements of the foot in the climbing process are analyzed, and several climbing experiments of a robot prototype are carried out on a variety of rough walls and ceilings.
-
Key words:
- climbing robots /
- spiny gripper /
- rough ceiling /
- mechanisms
-
[1] Nansai S, Mohan R. A survey of wall climbing robots: Recent advances and challenges[J]. Robotics, 2016, 5(3):14 doi: 10.3390/robotics5030014 [2] Asbeck A T, Kim S, Cutkosky M R, et al. Scaling hard vertical surfaces with compliant microspine arrays[J]. The International Journal of Robotics Research, 2006, 25(12):1165-1179 doi: 10.1177/0278364906072511 [3] Spenko M J, Haynes G C, Saunders J A, et al. Biologically inspired climbing with a hexapedal robot[J]. Journal of Field Robotics, 2008, 25(4-5):223-242 doi: 10.1002/rob.20238 [4] Haynes G C, Khripin A, Lynch G, et al. Rapid pole climbing with a quadrupedal robot[C]//Proceedings of 2009 IEEE International Conference on Robotics and Automation. Kobe, Japan: IEEE, 2009: 2767-2772 [5] 陈东良, 张群, 王立权, 等.一种粗糙壁面爬行机器人的设计与实现[J].哈尔滨工程大学学报, 2012, 33(2):209-213 doi: 10.3969/j.issn.1006-7043.201012057Chen D L, Zhang Q, Wang L Q, et al. Design and realization of a kind of rough wall climbing robot[J]. Journal of Harbin Engineering University, 2012, 33(2):209-213(in Chinese) doi: 10.3969/j.issn.1006-7043.201012057 [6] Xu F Y, Wang X S, Jiang G P. Design and analysis of a wall-climbing robot based on a mechanism utilizing hook-like claws[J]. International Journal of Advanced Robotic Systems, 2012, 9(6):261 doi: 10.5772/53895 [7] Ji A H, Zhao Z H, Manoonpong P, et al. A bio-inspired climbing robot with flexible pads and claws[J]. Journal of Bionic Engineering, 2018, 15(2):368-378 doi: 10.1007/s42235-018-0028-6 [8] Carpenter K, Wiltsie N, Parness A. Rotary microspine rough surface mobility[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(5):2378-2390 doi: 10.1109/TMECH.2015.2511012 [9] Liu Y W, Sun S M, Wu X, et al. A wheeled wall-climbing robot with bio-inspired spine mechanisms[J]. Journal of Bionic Engineering, 2015, 12(1):17-28 doi: 10.1016/S1672-6529(14)60096-2 [10] Parness A, Abcouwer N, Fuller C, et al. LEMUR 3: a limbed climbing robot for extreme terrain mobility in space[C]//Proceedings of 2017 IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 5467-5473 [11] Nagaoka K, Minote H, Maruya K, et al. Passive spine gripper for free-climbing robot in extreme terrain[J]. IEEE Robotics and Automation Letters, 2018, 3(3):1765-1770 doi: 10.1109/LRA.2018.2794517 [12] Xu F Y, Wang B, Shen J J, et al. Design and realization of the claw gripper system of a climbing robot[J]. Journal of Intelligent & Robotic Systems, 2018, 89(3-4):301-317 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dc5610225bae841af5043a364ad11cef [13] 江南.对抓钩爪式六足爬壁机器人[D].南京: 南京航空航天大学, 2018Jiang N. A claws-paired hexapod climbing robot[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018(in Chinese) [14] Liu G W, Liu Y W, Wang X J, et al. Design and experiment of a bioinspired wall-climbing robot using spiny grippers[C]//Proceedings of 2016 IEEE International Conference on Mechatronics and Automation. Harbin, China: IEEE, 2016: 665-670 [15] Mukherjee R, Vaughn S, Trimmer B A. The neuromechanics of proleg grip release[J]. Journal of Experimental Biology, 2018, 221(13):jeb173856 doi: 10.1242/jeb.173856 -

 下载:
下载:





 点击查看大图
点击查看大图
图(16)
计量
- 文章访问数: 391
- HTML全文浏览量: 197
- PDF下载量: 110
- 被引次数: 0
