




Ankle Joint Modeling and Dynamics Simulation of Wearable Lower Limb Exoskeleton Robot
-
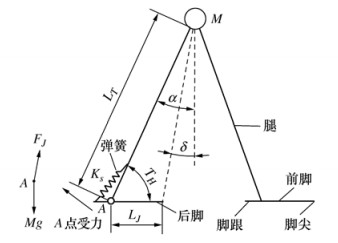
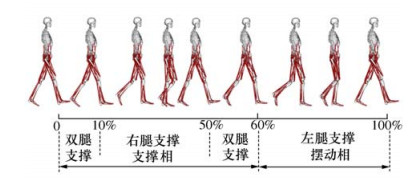
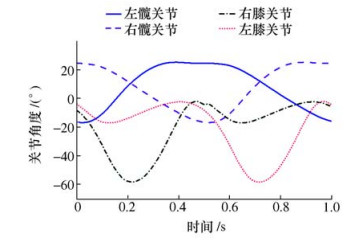
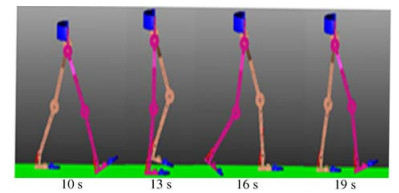
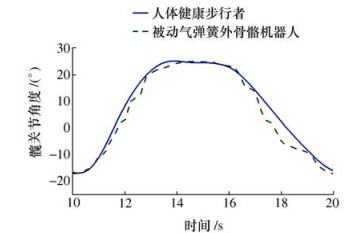
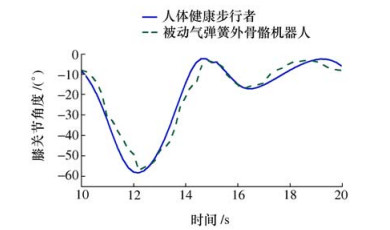
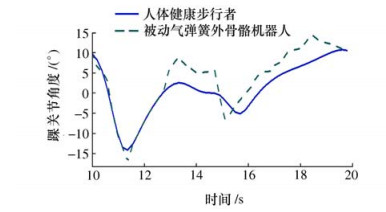
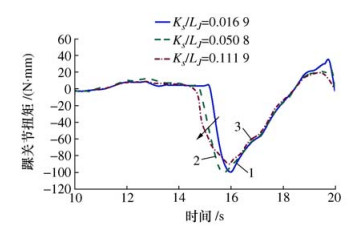
摘要: 下肢外骨骼机器人是一种具有辅助助力和医疗康复功能的智能型机械装置。本文通过对人体踝关节结构分析,设计了被动气弹簧踝关节下肢外骨骼机器人,并建立了被动踝关节力学模型;利用OpenSim获得了正常人行走时一个步态周期髋、膝关节步态数据,将其导入ADAMS对所设计的下肢外骨骼机器人踝关节未加气弹簧和加气弹簧两种模型进行了动力学仿真,通过对两种模型运动曲线对比分析,验证了所设计的下肢外骨骼机器人在步态行走和动力学方面的可行性和正确性。Abstract: The lowerlimb exoskeleton robot is an intelligent device which can assist walking and rehabilitation training. A passive ankle with the pneumatic spring of thelowerlimb exoskeleton robot was designedthrough analyzing the structure of human's ankle joint, and the passive ankle joint modelwas established.The data on one gait cycle of the hip and knee ankle on a normal walking person are obtained with the Opensim software and imported into ADAMS for simulating the designed lower limb exoskeleton robot with or without a pneumatic spring. The comparison with the two motion curves and the dynamics simulation results show thatthe walking gait and dynamicsof the designed lower limb exoskeleton robot is feasible and correct.
-
Key words:
- lowerlimb exoskeleton robot /
- ankle joint modeling /
- gait analysis /
- dynamics /
- simulation
-
表 1 下肢外骨骼机器人模型参数
名称 密度/(kg·m-3) 质量/kg 转动惯量/(kg·m2) lxx lyy lzz 腰部 2.710×103 1.310 8 3.262×10-3 3.119×10-2 3.196×10-2 腰部连杆 2.710×103 0.435 3 7.573×10-4 3.384×10-4 1.065×10-3 大腿上连杆 2.710×103 0.749 5 1.469×10-2 4.484×10-4 1.449×10-2 大腿下连杆 2.710×103 0.548 7 4.198×10-3 3.753×10-4 4.529×10-3 小腿上连杆 2.710×103 0.329 7 1.616×10-3 1.616×10-3 1.616×10-3 小腿下连杆 2.710×103 0.462 8 4.063×10-3 6.461×10-5 4.108×10-3 脚后跟 2.710×103 0.943 1 1.194×10-3 3.337×10-3 2.157×10-3 脚前掌 2.710×103 0.649 1 8.863×10-4 1.701×10-3 8.464×10-4  下载: 导出CSV
下载: 导出CSV
-
[1] 张学胜, 赖庆仁, 陈亚宁, 等.负重外骨骼机器人的设计及其运动学动力学仿真[J].机械科学与技术, 2013, 32(4):568-572 https://journals.nwpu.edu.cn/jxkxyjs/article/id/5334Zhang X S, Lai Q R, Cheng Y N, et al. The kinematics and dynamics simulation of the exoskeleton robot for bearing[J]. Mechanical Science and Technology for Aerospace Engineering, 2013, 32(4):568-572(in Chinese) https://journals.nwpu.edu.cn/jxkxyjs/article/id/5334 [2] 汪步云, 汪志红, 许德章.下肢外骨骼助力机器人本体结构设计与运动学分析[J].机械科学与技术, 2018, 37(4):553-559 doi: 10.13433/j.cnki.1003-8728.2018.0410Wang B Y, Wang Z H, Xu D Z. Mechanical design and kinematics analysis on a wearable power-assisted robot for lower extremity exoskeleton[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(4):553-559(in Chinese) doi: 10.13433/j.cnki.1003-8728.2018.0410 [3] 汪步云, 宋在杰, 汪志红, 等.可穿戴型下肢外骨骼助力机器人设计与研究[J].机械科学与技术, 2018, 37(9):1344-1351 doi: 10.13433/j.cnki.1003-8728.20180164Wang B Y, Song Z J, Wang Z H, et al. Design and research on a wearable power-assisted robot for lower extremity exoskeleton[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(9):1344-1351(in Chinese) doi: 10.13433/j.cnki.1003-8728.20180164 [4] Kao P C, Lewis C L, Ferris D P. Invariant ankle moment patterns when walking with and without a robotic ankle exoskeleton[J]. Journal of Biomechanics, 2010, 43(2):203-209 doi: 10.1016/j.jbiomech.2009.09.030 [5] 郭素梅, 李建民, 吴庆文, 等.Lokomat全自动机器人步态训练与评定系统对不完全性脊髓损伤患者步行功能的影响[J].中国组织工程研究, 2012, 16(13):2324-2327 doi: 10.3969/j.issn.1673-8225.2012.13.010Guo S M, Li J M, Wu Q W, et al. Effect of gait training and assessment system of Lokomat automatic robot on walking ability of patients with incomplete spinal cord injury[J]. Chinese Journal of Tissue Engineering Research, 2012, 16(13):2324-2327(in Chinese) doi: 10.3969/j.issn.1673-8225.2012.13.010 [6] Esquenazi A, Talaty M, Packel A, et al. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury[J]. American Journal of Physical Medicine & Rehabilitation, 2012, 91(11):911-921 [7] Suzuki K, Mito G, Kawamoto H, et al. Intention-based walking support for paraplegia patients with Robot Suit HAL[J]. Advanced Robotics, 2007, 21(12):1441-1469 doi: 10.1163/156855307781746061 [8] None. Protonex powers Lockheed Martin HULC exoskeleton[J]. Fuel Cells Bulletin, 2010, 2010(2):4-5 [9] Guo Q, Zhou H, Jiang D. Coordinated control method of the lower extremity exoskeleton based on human electromechanical coupling[C]//Proceedings of the 4th International Conference on Social Robotics. Chengdu: Springer, 2012: 1012-1017 [10] Gordon K E, Ferris D P. Learning to walk with a robotic ankle exoskeleton[J]. Journal of Biomechanics, 2007, 40(12):2636-2644 doi: 10.1016/j.jbiomech.2006.12.006 [11] Wu T M, Wang S Y, Chen D Z. Design of an exoskeleton for strengthening the upper limb muscle for overextension injury prevention[J]. Mechanism and Machine Theory, 2011, 46(12):1825-1839 doi: 10.1016/j.mechmachtheory.2011.08.003 [12] Wu Q C, Wang X S. Design of a gravity balanced upper limb exoskeleton with Bowden cable actuators[J]. IFAC Proceedings Volumes, 2013, 46(5):678-683 doi: 10.3182/20130410-3-CN-2034.00131 [13] 马挺, 郭险峰.外骨骼机器人柔性变刚度驱动器设计[J].科技资讯, 2014(35):65-66, 68 doi: 10.3969/j.issn.1672-3791.2014.35.048Ma T, Guo X F. Design of variable stiffness actuator of exoskeleton robot[J]. Science & Technology Information, 2014(35):65-66, 68(in Chinese) doi: 10.3969/j.issn.1672-3791.2014.35.048 [14] 霍金月, 喻洪流, 王峰, 等.穿戴式下肢外骨骼助行机器人系统研究[J].中国康复理论与实践, 2019, 25(4):481-486 doi: 10.3969/j.issn.1006-9771.2019.04.021Huo J Y, Yu H L, Wang F, et al. Research of a wearable lower extremity assisted exoskeleton robot system[J]. Chinese Journal of Rehabilitation Theory and Practice, 2019, 25(4):481-486(in Chinese) doi: 10.3969/j.issn.1006-9771.2019.04.021 [15] Collins S H, Wiggin M B, Sawicki G S. Reducing the energy cost of human walking using an unpowered exoskeleton[J]. Nature, 2015, 522(7555):212-215 doi: 10.1038/nature14288 [16] Malcolm P, Derave W, Galle S, et al. A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking[J]. PLoS One, 2013, 8(2):e56137 doi: 10.1371/journal.pone.0056137 [17] 陈兵, 骆敏舟, 孙少明, 等.基于仿生原理的节能减振类人机器人膝关节的设计[J].机器人, 2014, 36(2):218-223 http://d.old.wanfangdata.com.cn/Periodical/jqr201402012Chen B, Luo M Z, Sun S M, et al. Design of energy-saving and vibration damping knee joint of humanoid robot based on bionic principles[J]. Robot, 2014, 36(2):218-223(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201402012 [18] 陈炜, 王立柱, 张林琰, 等.下肢外骨骼康复机器人动力学分析与仿真[J].机械设计, 2018, 35(4):71-77 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201804011Chen W, Wang L Z, Zhang L Y, et al. Dynamic analysis and simulation for lower limb exoskeleton rehabilitation robot[J]. Journal of Machine Design, 2018, 35(4):71-77(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201804011 -




 点击查看大图
点击查看大图

图(12) / 表(1)
计量
- 文章访问数: 546
- HTML全文浏览量: 571
- PDF下载量: 103
- 被引次数: 0
