




Inverse Kinematics Solution of Mining Robot via APSO-LM-BP Neural Network
-
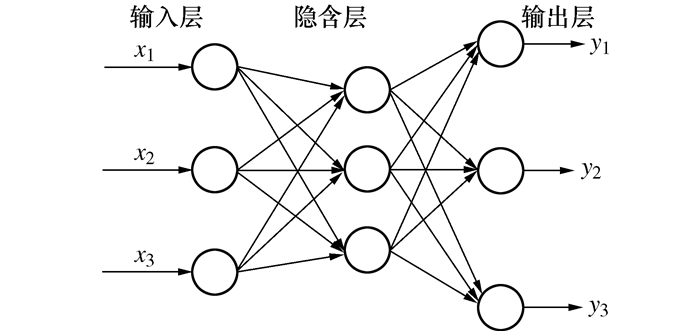
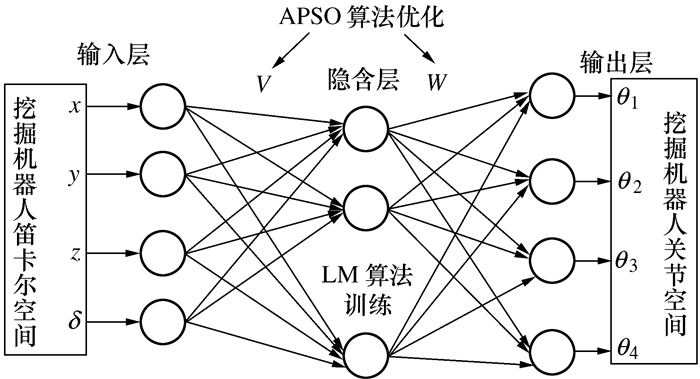
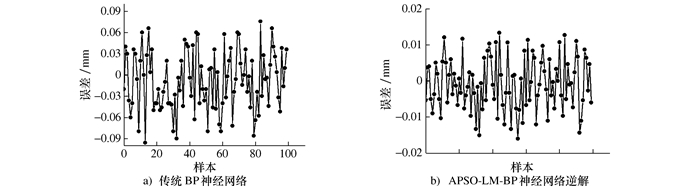
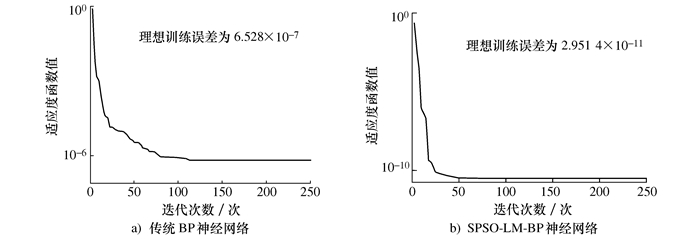
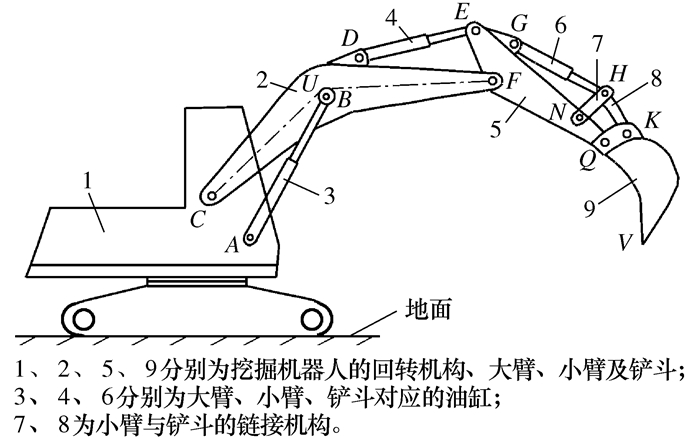
摘要: 针对挖掘机器人执行机构的运动学逆解求解难、速度慢的问题,提出一种基于APSO-LM-BP神经网络的逆运动学求解方法。利用自适应粒子群(APSO)算法对BP神经网络中的连接权值以及阈值进行优化,再把BP神经网络训练过程中的梯度下降法用LM算法代替,以克服传统BP神经网络的输出误差大,陷入局部极优解的缺陷。仿真结果表明,与传统BP神经网络相比,APSO-LM-BP神经网络输出误差大大降低,训练时间更短,改善了算法的收敛精度和收敛速度,且满足挖掘机器人运动学逆解要求。该方法可以推广至任意自由度串联机器人的逆运动学求解,具有较强的实用性。
-
关键词:
- 运动学逆解 /
- 挖掘机器人 /
- APSO-LM-BP神经网络 /
- 收敛
Abstract: In view of the problem that the inverse kinematics solution of mining robot actuator is difficult and slow, an inverse kinematics solution method based on the improved neural network is proposed. The Adaptive Particle Swarm Optimization (APSO) algorithms is used to optimize the connection weights and thresholds in the Back Propagation (BP) neural networks, then the gradient descent method in the training process of BP neural networks is replaced with Levenberg Marquardt (LM) algorithm. The simulation results show that comparing with the traditional BP neural networks, the output error of the APSO-LM-BP neural networks and the training time decreases greatly, the convergence precision and convergence speed of the algorithm are improved, and the inverse kinematics solution of the mining robot is satisfied. The present method can be extended to solve the inverse kinematics of a series robot with the arbitrary degrees of freedom.-
Key words:
- inverse kinematics solution /
- mining robot /
- APSO-LM-BP neural networks /
- convergence
-
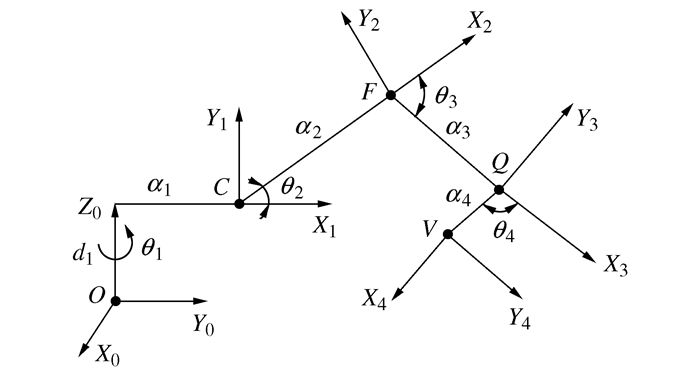
表 1 矿用挖掘机器人DH参数
关节i θi/(°) ai/m αi/(°) di/m 1 -180~180 0 90 0.197 2 -51~75 3.70 0 0 3 -148~30.5 1.68 0 0 4 -160~32 1.07 0 0  下载: 导出CSV
下载: 导出CSV
表 2 传统BP神经网络和APSO-LM-BP神经网络两随机点预测结果对比
铲斗末端位置坐标 (0.31, 0.25, 0.19) (0.39, 0.42, 0.41) 传统BP逆解 (3.487, 3.914, 2.359) (3.635, 3.029, 3.353) 传统BP神经网络 铲斗末端预测位置坐标 (0.241, 0.165, 0.119) (0.362, 0.361, 0., 317) 绝对误差 (0.068, 0.085, 0.071) (0.028, 0.059, 0.093) APSO-LM-BP逆解 (3.590, 3.864, 2.368) (3.649, 3.131, 3.353) APSO-LM-BP神经网络 铲斗末端预测位置坐标 (0.292, 0.264, 0.1, 96) (0.398, 0.411, 0.420) 绝对误差 (0.018, 0.014, 0.004) (0.008, 0.009, 0.010)
下载: 导出CSV
表 3 两算法训练时间对比情况
算法 训练时间/s 第一次 第二次 第三次 第四次 第五次 传统BP神经网络 439 441 457 450 436 APSO-LM-BP神经网络 8.354 8.128 8.647 8.267 8.053
下载: 导出CSV
-
[1] Niku S B.机器人学导论[M].孙富春, 朱纪洪, 刘国栋, 等, 译.北京: 电子工业出版社, 2013Niku S B. Introduction to robotics[M]. Sun F C, Zhu J H, Liu G D, et al, trans. Beijing: Electronic Industry Press, 2013(in Chinese) [2] Starke S, Hendrich N, Magg S, et al. An efficient hybridization of genetic algorithms and particle swarm optimization for inverse kinematics[C]//Proceedings of 2016 IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2016 https://www.researchgate.net/publication/309410562_An_Efficient_Hybridization_of_Genetic_Algorithms_and_Particle_Swarm_Optimization_for_Inverse_Kinematics [3] 林贞国.挖掘机器人轨迹规划与仿真研究[D].太原: 太原科技大学, 2016 http://cdmd.cnki.com.cn/Article/CDMD-10109-1016905526.htmLin Z G. Research on trajectory planning and simulation of excavatoy robot[D]. Taiyuan: Taiyuan University of Science and Technology, 2016(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10109-1016905526.htm [4] Jiang G W, Luo M Z, Bai K Q, et al. A precise positioning method for a puncture robot based on a PSO-optimized BP neural network algorithm[J]. Applied Sciences, 2017, 7(10):969 doi: 10.3390/app7100969 [5] 周枫林, 游雨龙, 李光.空间3R机械臂逆向运动学的奇异轨迹线方法研究[J].机械科学与技术, 2019, 38(3):365-372 doi: 10.13433/j.cnki.1003-8728.20180289Zhou F L, You Y L, Li G. A solving method for inverse kinematics of space 3R manipulator based on singular trajectory theory[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(3):365-372(in Chinese) doi: 10.13433/j.cnki.1003-8728.20180289 [6] 林阳, 赵欢, 丁汉.基于多种群遗传算法的一般机器人逆运动学求解[J].机械工程学报, 2017, 53(3):1-8 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201703001Lin Y, Zhao H, Ding H. Solution of inverse kinematics for general robot manipulators based on multiple population genetic algorithm[J]. Journal of Mechanical Engineering, 2017, 53(3):1-8(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201703001 [7] 叶长龙, 张思阳, 于苏洋, 等.基于神经网络的全方位移动机器人运动稳定性研究[J].机器人, 2019, 41(4):443-451 http://d.old.wanfangdata.com.cn/Periodical/jqr201904003Ye C L, Zhang S Y, Yu S Y, et al. Research on movement stability of Omni-directional mobile robot based on neural network[J]. Robot, 2019, 41(4):443-451(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201904003 [8] Bidokhti H S, Enferadi J. Direct kinematics solution of 3-RRR robot by using two different artificial neural networks[C]//Proceedings of 2015 3rd RSI International Conference on Robotics and Mechatronics (ICROM). Tehran: IEEE, 2015 https://www.researchgate.net/publication/308861305_Direct_kinematics_solution_of_3-RRR_robot_by_using_two_different_artificial_neural_networks [9] 欧群文, 贠超, 杨学兵, 等.基于神经网络的冗余机械臂运动学逆解研究[J].机电工程, 2016, 33(6):663-667 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jdgc201606004Ou Q W, Yun C, Yang X B, et al. Algorithm based on neural network for inverse kinematics of redundant manipulator[J]. Journal of Mechanical & Electrical Engineering, 2016, 33(6):663-667(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jdgc201606004 [10] Asadi-Eydivand M, Ebadzadeh M M, Solati-Hashjin M, et al. Cerebellum-inspired neural network solution of the inverse kinematics problem[J]. Biological Cybernetics, 2015, 109(6):561-574 doi: 10.1007/s00422-015-0661-7 [11] Zhang L P, Ma S G, Li B, et al. BP networks based trajectory planning and inverse kinematics of a reconfigurable mars rover[C]//Proceedings of Second International Conference on Advances in Neural Networks. Chongqing: Springer, 2005 [12] 杨彩霞, 张锦, 陶志勇, 等.基于PSO改进BP神经网络算法的金属表面缺陷分类[J].制造业自动化, 2018, 40(7):5-7 doi: 10.3969/j.issn.1009-0134.2018.07.002Yang C X, Zhang J, Tao Z Y, et al. Defects classification of metal part's surface based on PSO improved BP neural network algorithm[J]. Manufacturing Automation, 2018, 40(7):5-7(in Chinese) doi: 10.3969/j.issn.1009-0134.2018.07.002 [13] 刘峰, 刘海生.基于改进小波神经网络的动车组牵引电机故障趋势预测[J].制造业自动化, 2017, 39(7):15-18, 28 doi: 10.3969/j.issn.1009-0134.2017.07.004Liu F, Liu H S. Fault trend prediction of EMU traction motor based on improved wavelet neural network[J]. Manufacturing Automation, 2017, 39(7):15-18, 28(in Chinese) doi: 10.3969/j.issn.1009-0134.2017.07.004 [14] Praveen C, Duvigneau R. Low cost PSO using metamodels and inexact pre-evaluation:application to aerodynamic shape design[J]. Computer Methods in Applied Mechanics and Engineering, 2009, 198(9-12):1087-1096 doi: 10.1016/j.cma.2008.11.019 [15] Kennedy J, Eberhart R. Particle swarm optimization[C]//Proceedings of ICNN'95-International Conference on Neural Networks. Perth: IEEE, 1995: 1942-1948 -

 点击查看大图
点击查看大图
图(9) / 表(3)
计量
- 文章访问数: 585
- HTML全文浏览量: 230
- PDF下载量: 33
- 被引次数: 0
