




Binocular Vision Obstacle Detection System of Wall Climbing Robot
-
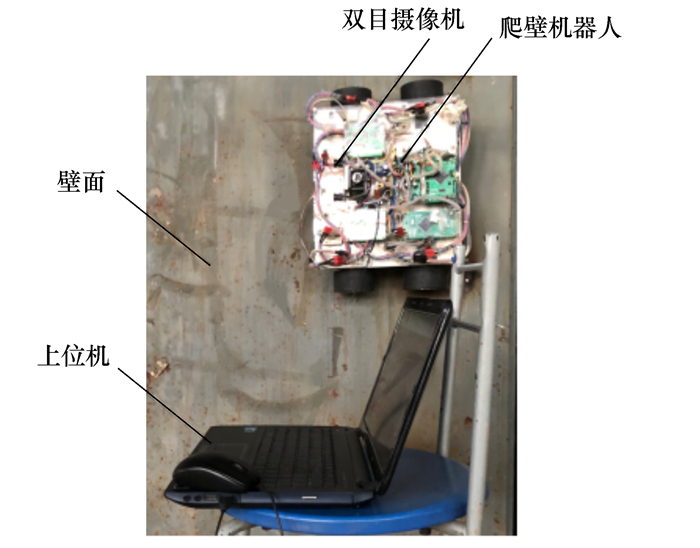
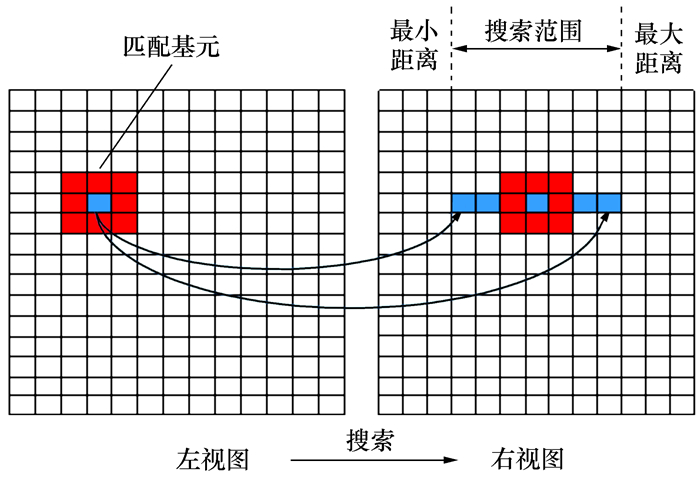
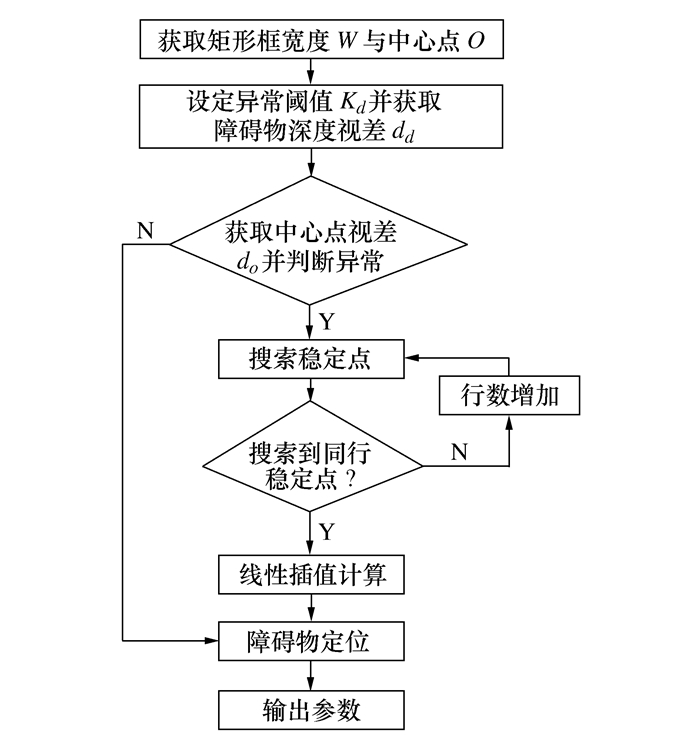
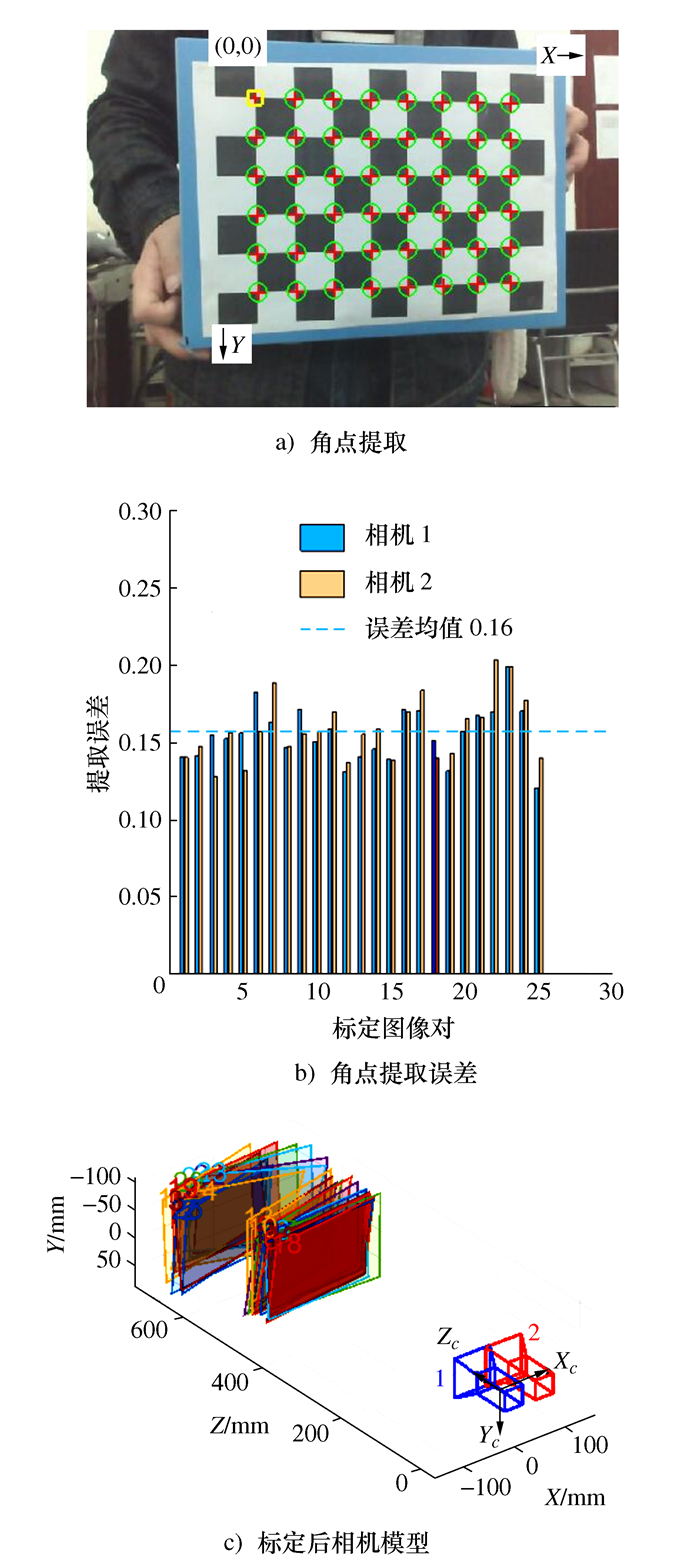
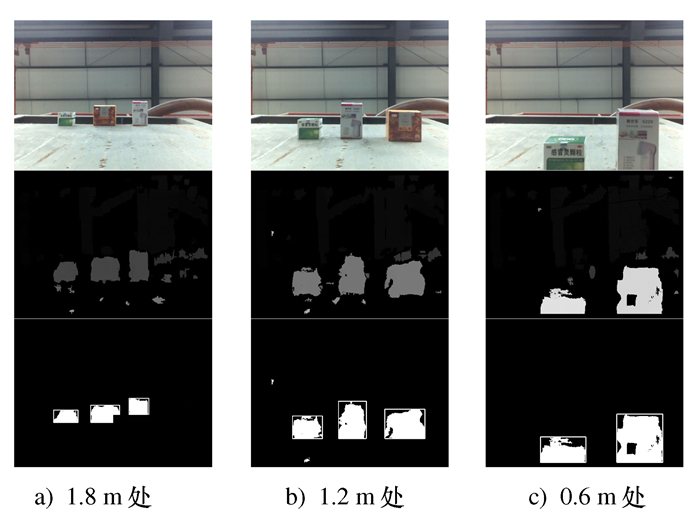
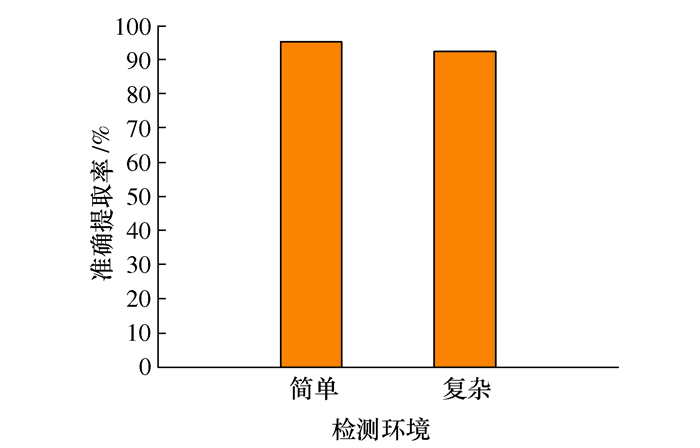
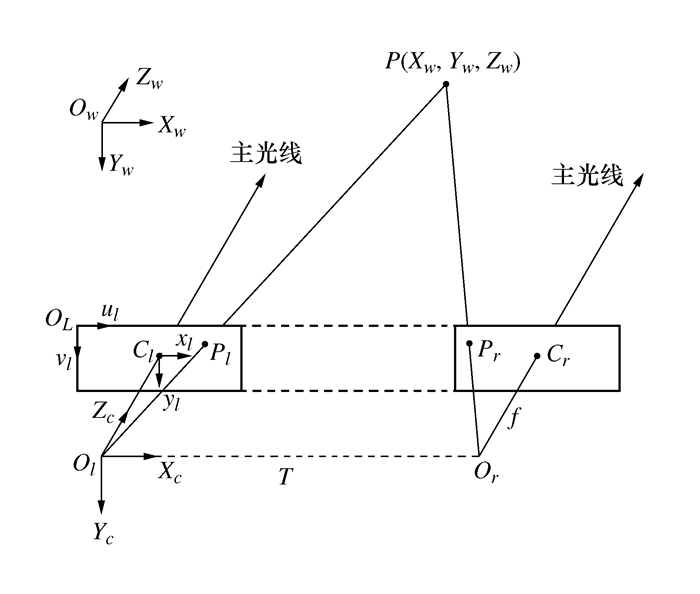
摘要: 针对壁面障碍物的不确定性,设计了一种爬壁机器人双目视觉障碍检测系统。具体包括搭建双目平行视觉系统,根据双目视觉理论对摄像机进行标定,获取相机标定参数;通过标定参数和极线约束对双目图像进行校正,解决图像畸变不共面问题;利用块搜索模型和相似度函数获取视差,保证视差获取的快速性与鲁棒性;最后提出一种障碍物检测算法:建立壁面检测模型约束检测范围,引入面积阈值,过滤干扰并实现障碍物提取,提出一种障碍物定位算法,通过宽度、深度与偏距三个方面对障碍物进行定位,同时,通过线性插值解决障碍物中心视差丢失问题。实验结果表明:在保证实时性的基础上,该系统能够有效检测前方障碍物且准确提取率能够达到95.9%,定位误差为4.91%,满足爬壁机器人检测要求。Abstract: Aiming at the uncertainty of wall obstacles, the wall climbing robot obstacle detection system based on the binocular vision is designed. Firstly, a binocular parallel vision system is built to calibrate the camera according to in terms of the binocular vision theory, and the camera calibration parameters is obtained. Then, the binocular images are corrected with the calibration parameters and the non-coplanar image distortion is solved with the epipolar constraints. Then the parallax is obtained with the block search model and similarity function to ensure the rapidity and robustness of parallax acquisition. Finally, an obstacle detection algorithm is proposed, in which the wall detection model is established to constrain the detection range, the area threshold is introduced to filter the interference and extract the obstacles. An obstacle location algorithm is proposed, which locates the obstacle in three aspects: width, depth and offset. At the same time, the parallax loss problem in the center of the obstacle is solved with the linear interpolation. The experimental results show that on the basis of the real-time performance, the system can effectively detect obstacles and the accurate extraction rate can reach 95.9% and the positioning error is 4.91%. It meets the requirements of wall-climbing robot detection.
-
Key words:
- obstacle detection /
- binocular vision /
- climbing robot
-
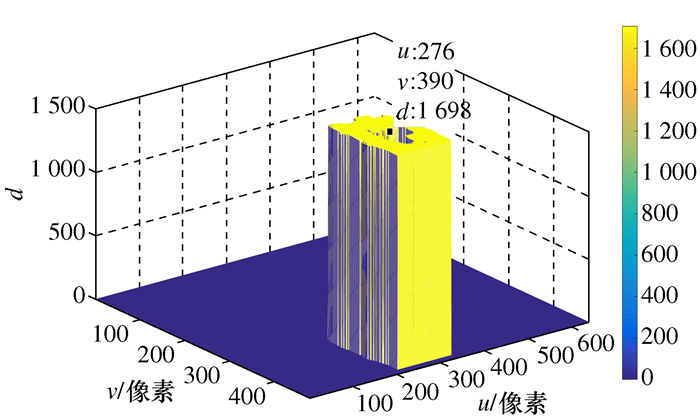
表 1 视差插值数据
序号 视差di 判断异常 视差均值dd(剔除异常值后) 中心点视差do 稳定点视差与搜索距离 中心点视差(插值后) 插值误差/% 1 1 685 正常 1 692 -16 lr=35
ll=33
dl=1 696
dr=1 7001 698 0.35 2 1 705 正常 3 1 681 正常 4 -16 异常 5 1 683 正常 6 1 703 正常 7 1 692 正常 8 -16 异常 9 1 684 正常 10 1 701 正常  下载: 导出CSV
下载: 导出CSV
表 2 误差数据
深度/m 深度误差/% 偏距误差/% 宽度误差/% 定位误差/% 0.6 1.90 3.26 7.61 4.26 0.9 2.04 3.90 7.84 4.59 1.2 2.12 4.53 8.12 4.92 1.5 2.30 4.98 8.43 5.24 1.8 2.56 5.32 8.75 5.54 平均 2.18 4.40 8.15 4.91
下载: 导出CSV
-
[1] 曲道奎.中国机器人产业发展现状与展望[J].中国科学院院刊, 2015, 30(3):342-346 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkxyyk201503007Qu D K. Development situation and prospects of Chinese robot industry[J]. Bulletin of the Chinese Academy of Sciences, 2015, 30(3):342-346(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkxyyk201503007 [2] 谭民, 王硕.机器人技术研究进展[J].自动化学报, 2013, 39(7):963-972 http://d.old.wanfangdata.com.cn/Periodical/dhj201305006Tan M, Wang S. Research progress on robotics[J]. Acta Automatica Sinica, 2013, 39(7):963-972(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/dhj201305006 [3] 唐东林, 袁波, 胡琳, 等.储罐探伤爬壁机器人全遍历路径规划方法[J].工程设计学报, 2018, 25(3):253-261 doi: 10.3785/j.issn.1006-754X.2018.03.002Tang D L, Yuan B, Hu L, et al. Complete coverage path planning method for oil tank inspection wall climbing robot[J]. Chinese Journal of Engineering Design, 2018, 25(3):253-261(in Chinese) doi: 10.3785/j.issn.1006-754X.2018.03.002 [4] 董伟光, 王洪光, 姜勇.一种轮足复合式爬壁机器人动力学建模与分析[J].机器人, 2015, 37(3):264-270 http://d.old.wanfangdata.com.cn/Periodical/jqr201503002Dong W G, Wang H G, Jiang Y. Dynamics modeling and analysis of a wall-climbing robot with biped-wheel hybrid locomotion mechanism[J]. Robot, 2015, 37(3):264-270(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201503002 [5] Da Veiga R S, De Oliveira A S, De Arruda L V R, et al. Localization and navigation of a climbing robot inside a LPG spherical tank based on dual-LIDAR scanning of weld beads[M]//Koubaa A. Robot Operating System (ROS). Cham: Springer, 2016 [6] 丁幼春, 王书茂, 陈红.农用车辆作业环境障碍物检测方法[J].农业机械学报, 2009, 40(S1):23-27, 17 http://d.old.wanfangdata.com.cn/Periodical/nyjxxb2009z1005Ding Y C, Wang S M, Chen H. Obstacle detection in the working area of agricultural vehicle based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(S1):23-27, 17(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/nyjxxb2009z1005 [7] Lin C H, Jiang S Y, Pu Y J, et al. Robust ground plane detection for obstacle avoidance of mobile robots using a monocular camera[C]//Proceedings of 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, China: IEEE, 2010 [8] 韩延祥, 张志胜, 戴敏.用于目标测距的单目视觉测量方法[J].光学精密工程, 2011, 19(5):1110-1117 http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201105024Han Y X, Zhang Z S, Dai M. Monocular vision system for distance measurement based on feature points[J]. Optics and Precision Engineering, 2011, 19(5):1110-1117(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201105024 [9] 顾征, 苏显渝.三目自适应权值立体匹配和视差校准算法[J].光学学报, 2008, 28(4):734-738 doi: 10.3321/j.issn:0253-2239.2008.04.023Gu Z, Su X Y. An algorithm based on adaptive support-weight and disparity adjustment for trinocular stereo-matching[J]. Acta Optica Sinica, 2008, 28(4):734-738(in Chinese) doi: 10.3321/j.issn:0253-2239.2008.04.023 [10] 王军, 柳红岩.基于三目视觉系统的车辆导引方法[J].计算机应用, 2014, 34(6):1762-1764 http://d.old.wanfangdata.com.cn/Periodical/jsjyy201406052Wang J, Liu H Y. Vehicle navigation method based on trinocular vision[J]. Computer Applications, 2014, 34(6):1762-1764(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jsjyy201406052 [11] Setti F, Bini R, Lunardelli M, et al. Shape measurement system for Single Point Incremental Forming (SPIF) manufacts by using trinocular vision and random pattern[J]. Measurement Science and Technology, 2012, 23(11):115402 doi: 10.1088/0957-0233/23/11/115402 [12] Kumar S. Binocular stereo vision based obstacle avoidance algorithm for autonomous mobile robots[C]//Proceedings of 2009 IEEE International Advance Computing Conference. Patiala: IEEE, 2009 [13] 王铮, 赵晓, 佘宏杰, 等.基于双目视觉的AGV障碍物检测与避障[J].计算机集成制造系统, 2018, 24(2):400-409 http://d.old.wanfangdata.com.cn/Periodical/jsjjczzxt201802012Wang Z, Zhao X, She H J, et al. Obstacle detection and obstacle avoidance of AGV based on binocular vision[J]. Computer Integrated Manufacturing Systems, 2018, 24(2):400-409(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jsjjczzxt201802012 [14] Labayrade R, Aubert D. A single framework for vehicle roll, pitch, yaw estimation and obstacles detection by stereovision[C]//IEEE IV2003 Intelligent Vehicles Symposium. Columbus: IEEE, 2003 [15] 王军华, 李丁, 刘盛鹏.基于改进RANSAC的消防机器人双目障碍检测[J].计算机工程与应用, 2017, 53(2):236-240 doi: 10.3778/j.issn.1002-8331.1504-0075Wang J H, Li D, Liu S P. Improved RANSAC estimation based fire-fighting robot obstacle detec-tion using binocular vision[J]. Computer Engineering and Applications, 2017, 53(2):236-240(in Chinese) doi: 10.3778/j.issn.1002-8331.1504-0075 [16] 刘昱岗, 王卓君, 王福景, 等.基于双目立体视觉的倒车环境障碍物测量方法[J].交通运输系统工程与信息, 2016, 16(4):79-87 doi: 10.3969/j.issn.1009-6744.2016.04.012Liu Y G, Wang Z J, Wang F J, et al. Vehicle reversing obstacle measurement based on binocular-camera stereo vision[J]. Journal of Transportation Systems Engineering and Information Technology, 2016, 16(4):79-87(in Chinese) doi: 10.3969/j.issn.1009-6744.2016.04.012 [17] 唐东林, 龙再勇, 袁波, 等.永磁吸附轮式爬壁机器人受力及功耗分析[J].机械科学与技术, 2019, 38(4):500-506 doi: 10.13433/j.cnki.1003-8728.20180213Tang D L, Long Z Y, Yuan B, et al. Analysis of mechanics and power consumption of wall-climbing robot with permanent magnet adsorption wheel[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(4):500-506(in Chinese) doi: 10.13433/j.cnki.1003-8728.20180213 -





 点击查看大图
点击查看大图
图(12) / 表(3)
计量
- 文章访问数: 375
- HTML全文浏览量: 135
- PDF下载量: 38
- 被引次数: 0
