




A Robot Arm Motion Planning Algorithm Guided by Cost Function
-
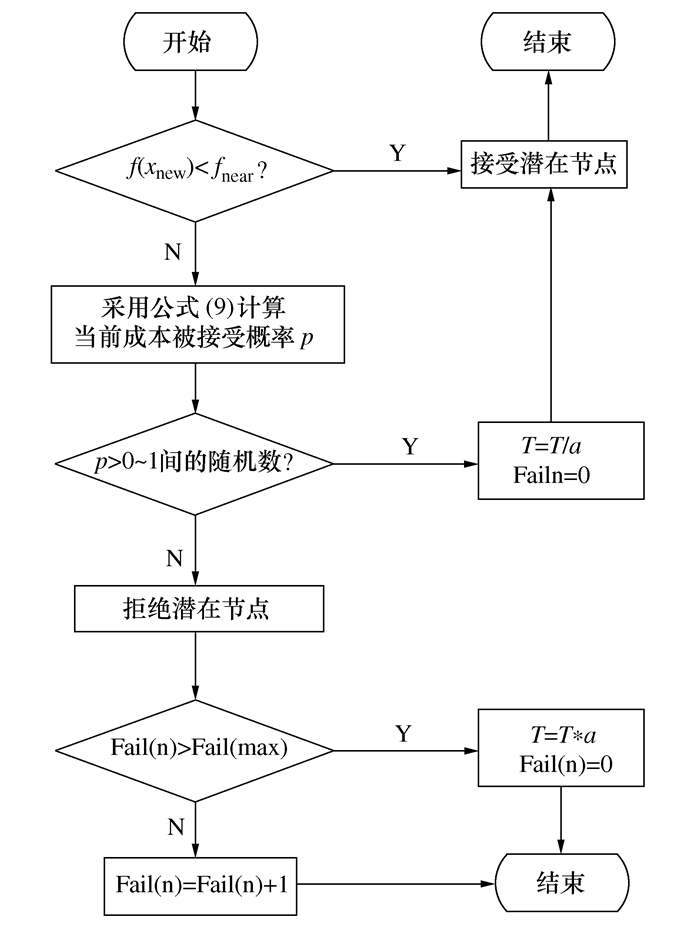
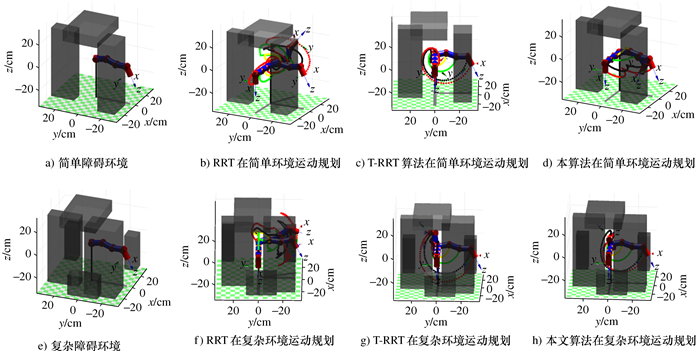
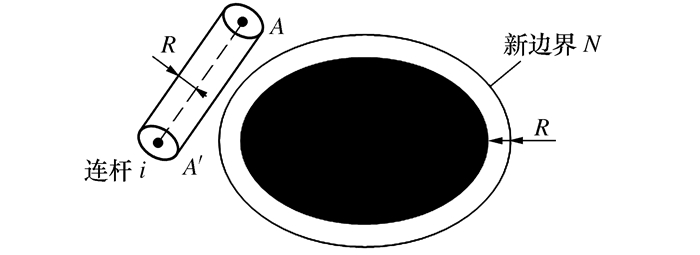
摘要: 本文提出一种基于连杆运动方程的人工势场,引导基于转换的快速随机扩展树(T-RRT)改进算法采样,在高维度空间搜索低成本路径的同时解决机械臂运动规划中T-RRT算法收敛速度慢的问题。简化机械臂模型以提高碰撞检测的效率,并与运动学分析结合调制连杆运动方程,从而确定各质点轨迹长度、叠加以建立机械臂人工势场,作为代价函数判断状态节点的成本,引导其不断向目标位置逼近,同时为了进一步提高算法的扩张速度,引入剪枝函数对细化节点进行限制。在不同的障碍地图中进行MATLAB仿真实验,该算法与RRT、T-RRT算法相比,路径长度最短、节点采样效率最高、节点平均采样时间最优,运行时间分别缩短了约3/4及2/3。所提算法在提高路径质量的同时有效提高搜索效率,能适应环境的变化。Abstract: The artificial potential field (APF) based on link motion equation is proposed to guide the sampling of improved Transition-based RRT (T-RRT), quickening the convergence speed of the T-RRT algorithm in the motion planning of a robot arm when it is searching the low-cost path in a high-dimensional space. The manipulator model is simplified to improve the efficiency of collision detection and to construct the link motion equation through kinematics analysis. Then the sum of trajectory length of every particle is calculated to build the APF. As a cost function to judge state nodes, the APF guides the state nodes that approach the target position. Besides, in order to raise the expansion speed of the algorithm, the pruning function is introduced to restrict refinement nodes. Various obstacle maps are simulated with MATLAB. Compared with RRT and T-RRT algorithms, our algorithm has the shortest path length, the highest node sampling efficiency, the shortest node average sampling time, with the running time being shortened by about 3/4 and 2/3 respectively. The proposed algorithm can effectively enhance search efficiency, improve the path quality and adapt to environmental change.
-
Key words:
- robot arm /
- improved T-RRT /
- link motion equation /
- APF /
- kinematics analysis /
- MATLAB
-
表 1 连杆参数
i 1 2 3 4 5 6 ai/cm 0 9 9 9 0 0 di/cm 0 0 0 0 0 7 αi/(°) 90 0 0 0 90 0 θi/(°) 0 0 0 0 0 0  下载: 导出CSV
下载: 导出CSV
-
[1] Devaurs D, Siméon T, Cortés J. Optimal path planning in complex cost spaces with sampling-Based algorithms[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(2):415-424 doi: 10.1109/TASE.2015.2487881 [2] An B, Kim J, Park F C. An adaptive stepsize RRT planning algorithm for open-chain robots[J]. IEEE Robotics and Automation Letters, 2018, 3(1):312-319 doi: 10.1109/LRA.2017.2745542 [3] Devaurs D, Siméon T, Cortés J. A multi-tree extension of the transition-based RRT: application to ordering-and-pathfinding problems in continuous cost spaces[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL, USA: IEEE, 2014: 2991-2996 [4] Gammell J D, Barfoot T D, Srinivasa S S. Informed sampling for asymptotically optimal path planning[J]. IEEE Transactions on Robotics, 2018, 34(4):966-984 doi: 10.1109/TRO.2018.2830331 [5] Dong Y Q, Camci E, Kayacan E. Faster RRT-based nonholonomic path planning in 2D building environments using skeleton-constrained path biasing[J]. Journal of Intelligent & Robotic Systems, 2018, 89(3-4):387-401 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7fc00bf61238295d4b3cfa4515c93dfe [6] Noreen I, Khan A, Ryu H, et al. Optimal path planning in cluttered environment using RRT*-AB[J]. Intelligent Service Robotics, 2018, 11(1):41-52 doi: 10.1007/s11370-017-0236-7 [7] An J, Lee G, Oh I, et al. Navigation-oriented design for in-pipe robot in recursively divided sampling space with rapidly exploring random tree[J]. Journal of Mechanical Science and Technology, 2017, 31(12):5987-5995 doi: 10.1007/s12206-017-1143-8 [8] Kim M C, Song J B. Informed RRT* with improved converging rate by adopting wrapping procedure[J]. Intelligent Service Robotics, 2018, 11(1):53-60 [9] Qureshi A H, Ayaz Y. Potential functions based sampling heuristic for optimal path planning[J]. Autonomous Robots, 2016, 40(6):1079-1093 doi: 10.1007/s10514-015-9518-0 [10] 张殿富, 刘福.基于人工势场法的路径规划方法研究及展望[J].计算机工程与科学, 2013, 35(6):88-95 doi: 10.3969/j.issn.1007-130X.2013.06.015Zhang D F, Liu F. Research and development trend of path planning based on artificial potential field method[J]. Computer Engineering and Science, 2013, 35(6):88-95(in Chinese) doi: 10.3969/j.issn.1007-130X.2013.06.015 [11] Kim D H, Shin S. New repulsive potential functions with angle distributions for local path planning[J] Advanced Robotics, 2006, 20(1):25-47 doi: 10.1163/156855306775275549 [12] 汪首坤, 朱磊, 王军政.基于导航势函数法的六自由度机械臂避障路径规划[J].北京理工大学学报, 2015, 35(2):186-191 http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201502015Wang S K, Zhu L, Wang J Z. Path plan of 6-DOF robot manipulators in obstacle environment based on navigation potential function[J]. Transactions of Beijing Institute of Technology, 2015, 35(2):186-191(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201502015 [13] 王俊龙, 张国良, 羊帆, 等.改进人工势场法的机械臂避障路径规划[J].计算机工程与应用, 2013, 49(21):266-270 doi: 10.3778/j.issn.1002-8331.1201-0360Wang J L, Zhang G L, Yang F, et al. Improved artificial field method on obstacle avoidance path planning for manipulator[J]. Computer Engineering and Applications, 2013, 49(21):266-270(in Chinese) doi: 10.3778/j.issn.1002-8331.1201-0360 [14] Kabutan R, Nishida T. Motion planning by T-RRT with potential function for vertical articulated robots[J]. Electrical Engineering in Japan, 2018, 204(2):34-43 doi: 10.1002/eej.23103 [15] Jaillet L, Cortés J, Siméon T. Transition-based RRT for path planning in continuous cost spaces[C]//2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France: IEEE, 2008: 2145-2150 -



 点击查看大图
点击查看大图
图(5) / 表(2)
计量
- 文章访问数: 295
- HTML全文浏览量: 92
- PDF下载量: 30
- 被引次数: 0
