




Analyzing Dynamics of a Novel Parallel Tracking Solar Device
-
摘要: 针对并联装置的结构复杂性、动力学模型的高度耦合性和非线性问题,以一种并联太阳跟踪装置为研究对象,对其机构运动特点和逆运动学进行了分析,基于U-K理论提出一种应用于并联机构的拉格朗日法和U-K理论相结合的动力学建模方法。首先,运用拉格朗日法求解了并联机构各支链的动力学模型;其次,考虑并联机构支链对动平台的约束关系,利用层级堆聚思想,在不引入拉格朗日乘子的情况下建立了跟踪装置的基于约束的动力学模型;最后,利用MATLAB和ADAMS联合仿真对所建立的动力学模型进行了求解和验证。结果表明理论计算与仿真分析的一致性。
-
关键词:
- 并联跟踪装置 /
- 动力学 /
- Udwadia-Kalaba方程 /
- 拉格朗日法
Abstract: To couple the highly complex and dynamic model of the structure of a parallel device and the nonlinear problem in a parallel solar tracking device, this paper analyzed its kinematic characteristics and inverse kinematics, proposed a dynamic modeling theory based on the U-K theory and applied the Lagrangian method to the parallel mechanism. Firstly, the Lagrangian method is used to solve the dynamic model of each branch of the parallel mechanism. Secondly, considering the constraint relationship of the parallel mechanism branch to the moving platform, this paper hierarchical accumulation idea instead of introducing the Lagrangian multiplier. Then the constraint-based dynamics model of the parallel solar tracking device was established. Finally, the established dynamic model is solved and verified with the MATLAB and ADAMS co-simulation. The simulation results show the consistency between theoretical calculation and simulation analysis.-
Key words:
- parallel solar tracking device /
- dynamics /
- Udwadia-Kalaba equation /
- Lagrangian method
-
表 1 并联跟踪装置结构参数
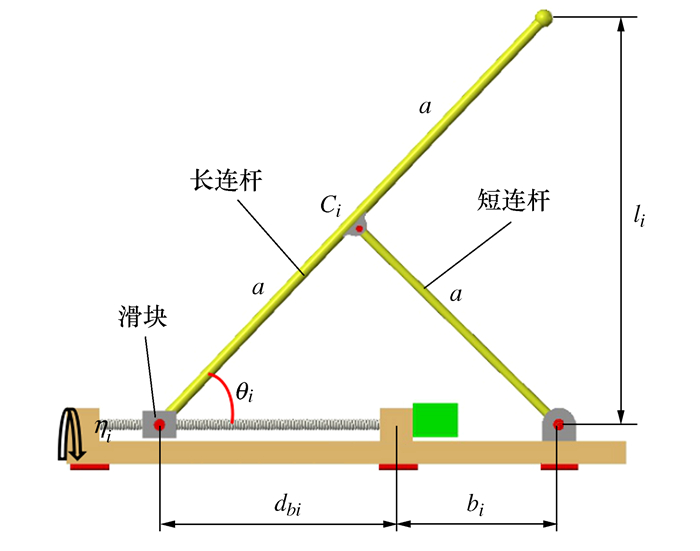
仿真参数 数值 两平台机构参数R1、R2、r1、r2/m 0.25 机构参数R3、r3/m 0.5 滑块质量mhi(i=1, 2, 3)/kg 1.022 长连杆质量mci(i=1, 2, 3)/kg 1.349 短连杆质量mdi(i=1, 2, 3)/kg 0.348 动平台(有负载)质量mp/kg 33.216 短连杆长度a/m 0.23  下载: 导出CSV
下载: 导出CSV
-
[1] 谢帅, 舒成辉, 贾天娇, 等.起落架摆振多体动力学建模及其在摆振飞行试验中的应用[J].机械科学与技术, 2018, 37(1):148-151 doi: 10.13433/j.cnki.1003-8728.2018.0122Xie S, Shu C H, Jia T J, et al. Multi-body dynamics modeling of landing gear shimmy and application in shimmy flight test based on model[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(1):148-151(in Chinese) doi: 10.13433/j.cnki.1003-8728.2018.0122 [2] 吴超宇, 钱小吾, 余伟, 等.直线驱动型并联机器人反向动力学分析与验证[J].农业机械学报, 2017, 48(12):412-420 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=nyjxxb201712051Wu C Y, Qian X W, Yu W, et al. Analysis and verification of linear driven parallel robot reverse dynamics[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12):412-420(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=nyjxxb201712051 [3] 舒红宇, 周成, 张富森.多连杆麦弗逊悬架运动分析与参数优化[J].机械科学与技术, 2018, 37(10):1477-1482 doi: 10.13433/j.cnki.1003-8728.20180045Shu H Y, Zhou C, Zhang F S. Kinematics analysis and parameter optimization of multi-link McPherson suspension[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(10):1477-1482(in Chinese) doi: 10.13433/j.cnki.1003-8728.20180045 [4] 赵俊伟, 李雪锋, 陈国强.基于Lagrange方法的3-PRS并联机构动力学分析[J].机械设计与研究, 2015, 31(2):1-5 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsjyyj201502001Zhao J W, Li X F, Chen G Q. The dynamics equation of a 3-PRS parallel manipulator based on Lagrange method[J]. Machine Design & Research, 2015, 31(2):1-5(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsjyyj201502001 [5] 王刚, 刘延杰, 吴明月, 等.基于拉格朗日乘子法的Delta并联机器人简化刚体动力学建模方法[J].机械与电子, 2015, (7):68-72, 76 http://d.old.wanfangdata.com.cn/Periodical/jxydz201507019Wang G, Liu Y J, Wu M Y, et al. A simplified rigid body dynamic modelling method of Delta robot based on Lagrangian multiplier method[J]. Machinery & Electronics, 2015, (7):68-72, 76(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxydz201507019 [6] 张彦斌, 王增辉, 何强, 等.新型完全各向同性移动并联机器人的动力学分析与仿真[J].机械传动, 2017, 41(10):113-118 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxcd201710021Zhang Y B, Wang Z H, He Q, et al. Dynamics analysis and simulation of a novel fully-isotropic translational parallel robot[J]. Journal of Mechanical Transmission, 2017, 41(10):113-118(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxcd201710021 [7] Enferadi J, Akbarzadeh Tootoonchi A. Inverse dynamics analysis of a general spherical star-triangle parallel manipulator using principle of virtual work[J]. Nonlinear Dynamics, 2010, 61(3):419-434 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=acb5346c8b9e2d83a8ca7619011d2f31 [8] 苑飞虎, 赵铁石, 刘晓, 等.一种六输入三自由度并联平台机构分析[J].机器人, 2013, 35(4):456-461 http://d.old.wanfangdata.com.cn/Periodical/jqr201304010Yuan F H, Zhao T S, Liu X, et al. Analysis on a parallel platform mechanism with 6 inputs and 3 DOFs[J]. Robot, 2013, 35(4):456-461(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201304010 [9] Nabat V, De La O Rodriguez M, Company O, et al. Par4: very high speed parallel robot for pick-and-place[C]//Proceedings of 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, Alta., Canada: IEEE, 2005: 553-558 http://www.researchgate.net/publication/224623151_Par4_very_high_speed_parallel_robot_for_pick-and-place [10] Udwadia F E, Kalaba R E. On the foundations of analytical dynamics[J]. International Journal of Non-linear Mechanics, 2002, 37(6):1079-1090 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1007.0444 [11] Udwadia F E, Phohomsiri P A. Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics[J]. Proceedings of the Royal Society A:Mathematical, Physical and Engineering Sciences, 2006, 462(2071):2097-2117 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=530ff2f2c486f80213cf6a2ee1faf3b2 [12] 洪健.基于Tau并联机器人的动力学及视觉伺服研究[D].合肥: 合肥工业大学, 2017: 1-41 http://cdmd.cnki.com.cn/Article/CDMD-10359-1017055804.htmHong J. Research on dynamics and visual servoing based on the Tau parallel robot[D]. Hefei: Hefei University of Technology, 2017: 1-41(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10359-1017055804.htm [13] Huang J, Chen Y H, Zhong Z H. Udwadia-Kalaba approach for parallel manipulator dynamics[J]. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(3):061003 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3732b4444d55a03d9b33a37062d04080 [14] 甄圣超, 赵韩, 黄康, 等.应用Udwadia-Kalaba理论对开普勒定律的研究[J].中国科学:物理学力学天文学, 2014, 44(1):24-31 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkx-cg201401002Zhen S C, Zhao H, Huang K, et al. On Kepler's law:application of the Udwadia-Kalaba theory[J]. Scientia Sinica Physica, Mechanica & Astronomica, 2014, 44(1):24-31(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkx-cg201401002 [15] 袁小龙.3-DOF并联跟踪机构性能分析与运动控制研究[D].兰州: 兰州理工大学, 2018: 8-13, 25-32 http://cdmd.cnki.com.cn/Article/CDMD-10731-1018956023.htmYuan X L. Research on performance analysis and motion control of 3-DOF parallel tracking mechanism[D]. Lanzhou: Lanzhou University of Technology, 2018: 8-13, 25-32(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10731-1018956023.htm -




 点击查看大图
点击查看大图

图(6) / 表(1)
计量
- 文章访问数: 215
- HTML全文浏览量: 86
- PDF下载量: 25
- 被引次数: 0
