




Calibration of Absolute Positioning Accuracy of Robots Considering Measurement Space
-
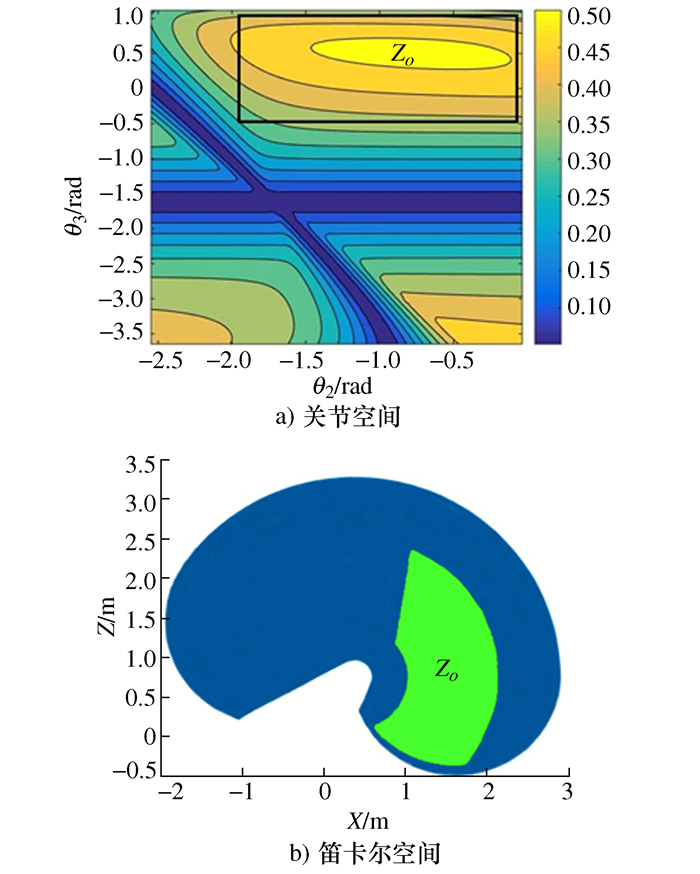
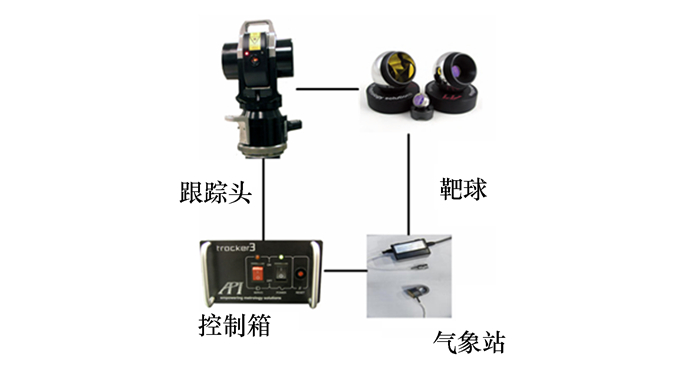
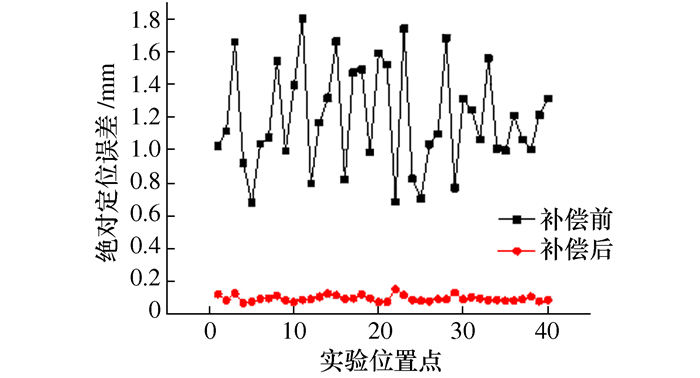
摘要: 相较于机床,工业机器人绝对定位精度较低,难以满足磨削等高精度加工工艺的需求,较大地限制了其应用拓展。针对该问题,本文重点考虑空间测量位置的优化与选择,提出了一种基于距离精度的机器人绝对定位精度标定方法。首先在空间测量位置对于测量精度影响分析的基础上,采用了雅克比矩阵条件数来定量描述机器人运动性能。结合机器人关节运动特征,分别给出了关节空间与末端笛卡尔运动空间内的机器人优化测量位置范围。然后采用MD-H运动学方法构建了机器人绝对定位精度误差模型,引入距离精度方法,通过距离误差计算避免了坐标系转换误差。最后基于KUKA机器人实验平台开展了标定实验,结果表明机器人平均绝对定位误差从标定前的1.191 mm降低到了0.096 mm,有效验证了方法的有效性。Abstract: Comparing with the CNC, absolute positioning accuracy of the industrial robots is low, and it is difficult to meet the requirements of high-precision machining processes such as grinding, which greatly limits its application development. Aiming at this problem, a calibration method for absolute positioning accuracy of robots based on the distance accuracy is proposed, which takes the optimization and selection of spatial measurement positions into consideration. Firstly, based on the influence of the spatial measurement positions on the measurement accuracy, the Jacobian matrix condition number is used to quantitatively describe the motion performance of the robot. Combining with the motion characteristics of robot joints, the optimal measurement spaces of the robot in joint space and Cartesian space are given. Then the MD-H (Modified D-H method) is used to construct the error model for the robot absolute positioning accuracy. The distance accuracy method is introduced, which is used to avoid the coordinate transformation error. Finally, based on the KUKA robot experimental platform, the calibration experiments were carried out. The results show that the average absolute positioning error of the robot decreases from 1.191 mm to 0.096 mm, which effectively validates the effectiveness of the calibration method.
-
表 1 KUKA KR210-2机器人关节参数
关节ji 变量θ/(°) di/mm αi/(°) ai/mm θ范围/(°) 1 θ1 750 0 0 -185~+185 2 θ2 0 -90 350 -146~+110 3 θ3 0 0 1 250 -209~+85 4 θ4 1 100 -90 -55 -350~+350 5 θ5 0 90 0 -125~+125 6 θ6 230 -90 0 -530~+170  下载: 导出CSV
下载: 导出CSV
表 2 KUKA KR210机器人关节参数误差
关节i 关节扭角/(°) 关节距离/mm 关节偏置/mm 关节转角/(°) y轴扭角/(°) 1 -0.003 24 0.249 03 -0.158 06 0.001 15 0 2 -0.006 56 -0.416 33 0 0.004 14 0.004 72 3 0.003 63 0.048 35 -0.209 11 -0.005 18 0 4 -0.003 15 0.007 84 0.343 21 0.001 16 0 5 0.008 35 -0.007 13 0.001 05 -0.002 35 0 6 -0.001 52 -0.249 14 0.000 91 0.008 17 0
下载: 导出CSV
-
[1] 陈宵燕, 张秋菊, 孙沂琳, 等.工业机器人位姿误差空间IDSW插值补偿方法研究[J].机械科学与技术, 2017, 36(3):378-385 doi: 10.13433/j.cnki.1003-8728.2017.0309Chen X Y, Zhang Q J, Sun Y L, et al. Space IDSW interpolation compensation method of position and orientation error of industrial robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(3):378-385(in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0309 [2] Xu X H, Zhu D H, Zhang H Y, et al. TCP-based calibration in robot-assisted belt grinding of aero-engine blades using scanner measurements[J]. The International Journal of Advanced Manufacturing Technology, 2017, 90(1-4):635-647 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0174973e9b59d0767059212a6379fae1 [3] Roth Z, Mooring B, Ravani B. An overview of robot calibration[J]. IEEE Journal on Robotics and Automation, 1987, 3(5):377-385 https://ieeexplore.ieee.org/document/1087124 [4] 周炜, 廖文和, 田威, 等.基于粒子群优化神经网络的机器人精度补偿方法研究[J].中国机械工程, 2013, 24(2):174-179 http://d.old.wanfangdata.com.cn/Periodical/zgjxgc201302007Zhou W, Liao W H, Tian W, et al. Method of industrial robot accuracy compensation based on particle swarm optimization neural network[J]. China Mechanical Engineering, 2013, 24(2):174-179(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zgjxgc201302007 [5] Pan Z X, Zhang H. Robotic machining from programming to process control:a complete solution by force control[J]. Industrial Robot:An International Journal, 2008, 35(5):400-409 [6] 王一, 刘常杰, 任永杰, 等.工业坐标测量机器人定位误差补偿技术[J].机械工程学报, 2011, 47(15):31-36 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201115005Wang Y, Liu C J, Ren Y J, et al. Compensation for positioning error of industrial coordinate measurement robot[J]. Journal of Mechanical Engineering, 2011, 47(15):31-36(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201115005 [7] 温秀兰, 崔俊宇, 芮平, 等.轴线测量与迭代补偿的机器人几何参数标定[J].计量学报, 2018, 39(4):449-454 http://d.old.wanfangdata.com.cn/Periodical/jlxb98201804001Wen X L, Cui J Y, Rui P, et al. Robot geometric parameters calibration based on axis measurement and iterative compensation[J]. Acta Metrologica Sinica, 2018, 39(4):449-454(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jlxb98201804001 [8] 何庆稀, 游震洲, 孔向东.一种基于位姿反馈的工业机器人定位补偿方法[J].中国机械工程, 2016, 27(7):872-876 http://d.old.wanfangdata.com.cn/Periodical/zgjxgc201607004He Q X, You Z Z, Kong X D. Positioning error compensation method of industrial robot based on closed-loop feedback of position and orientation[J]. China Mechanical Engineering, 2016, 27(7):872-876(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zgjxgc201607004 [9] Tan J D, Xi N, Wang Y C. A singularity-free motion control algorithm for robot manipulators-a hybrid system approach[J]. Automatica, 2004, 40(7):1239-1245 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f58faa3d5b9f16467d66733ae5e58548 [10] Klimchik A, Caro S, Pashkevich A. Optimal pose selection for calibration of planar anthropomorphic manipulators[J]. Precision Engineering, 2015, 40:214-229 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ab296e3233810917e1c6a1c2ba0cdf55 [11] Borm J H, Meng C H. Determination of optimal measurement configurations for robot calibration based on observability measure[J]. The International Journal of Robotics Research, 1991, 10(1):51-63 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1177/027836499101000106 [12] Klimchik A, Wu Y E, Pashkevich A, et al. Optimal selection of measurement configurations for stiffness model calibration of anthropomorphic manipulators[J]. Applied Mechanics and Materials, 2012, 162:161-170 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1211.5739 [13] Zargarbashi S H H, Khan W, Angeles J. The Jacobian condition number as a dexterity index in 6R machining robots[J]. Robotics and Computer-Integrated Manufacturing, 2012, 28(6):694-699 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ba815a4eb74d3505195082859d49bffb [14] Bu Y, Liao W H, Tian W, et al. Stiffness analysis and optimization in robotic drilling application[J]. Precision Engineering, 2017, 49:388-400 https://www.sciencedirect.com/science/article/abs/pii/S0141635916304184 [15] Lin Y, Zhao H, Ding H. Posture optimization methodology of 6R industrial robots for machining using performance evaluation indexes[J]. Robotics and Computer-Integrated Manufacturing, 2017, 48:59-72 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e3c3ff413c461d19aa5e34f9d72abc31 [16] Dumas C, Caro S, Garnier S, et al. Joint stiffness identification of six-revolute industrial serial robots[J]. Robotics and Computer-Integrated Manufacturing, 2011, 27(4):881-888 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=59b09f1a959f262b0c38afce3111935e [17] 龚星如, 沈建新, 田威, 等.工业机器人的绝对定位误差模型及其补偿算法[J].南京航空航天大学学报, 2012, 44(S1):60-64 http://d.old.wanfangdata.com.cn/Periodical/njhkht2012z1014Gong X R, Shen J X, Tian W, et al. Absolute positioning error model of industrial robot and compensation algorithm[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2012, 44(S1):60-64(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/njhkht2012z1014 [18] 张铁, 戴孝亮.基于距离误差的机器人运动学标定[J].华南理工大学学报, 2011, 39(11):98-103 http://d.old.wanfangdata.com.cn/Periodical/hnlgdxxb201111018Zhang T, Dai X L. Kinematic calibration of robot based on distance error[J]. Journal of South China University of Technology, 2011, 39(11):98-103(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hnlgdxxb201111018 [19] 任永杰, 邾继贵, 杨学友, 等.基于距离精度的测量机器人标定模型及算法[J].计量学报, 2008, 29(3):198-202 http://d.old.wanfangdata.com.cn/Periodical/jlxb98200803002Ren Y J, Zhu J G, Yang X Y, et al. Measurement robot calibration model and algorithm based on distance accuracy[J]. Acta Metrologica Sinica, 2008, 29(3):198-202(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jlxb98200803002 -


 点击查看大图
点击查看大图

图(5) / 表(2)
计量
- 文章访问数: 516
- HTML全文浏览量: 139
- PDF下载量: 52
- 被引次数: 0
