




Application of Adaptive Genetic Algorithm to Servo Parameter Optimization of Linear Motor Feed System
-
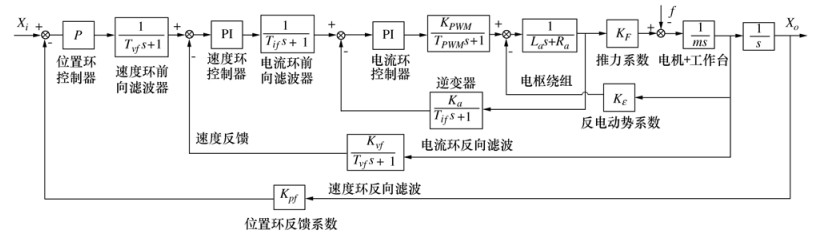
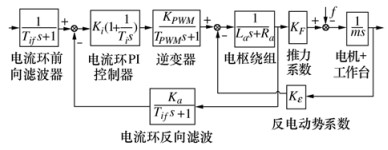
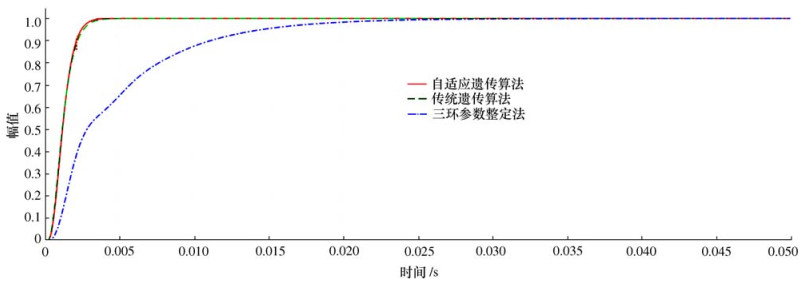
摘要: 针对传统经验方法难以得到合理的直线电机进给伺服系统控制参数,提出一种改进的自适应遗传算法对直线电机伺服系统五个控制参数进行同步优化。在分析直线电机进给系统控制原理的基础上,采用实数编码对控制参数进行编码生成种群,根据控制需求确定了由误差积分项、超调量惩罚项、稳定时间项组成的适应度函数,为加快遗传算法的收敛速度、防止算法进入局部收敛,采用非线性变化的自适应交叉率和变异率对算法进行改进。仿真结果显示,改进的自适应遗传算法在保证系统无超调的情况下使稳定时间达到4.1 ms,优于"三环参数整定法"的39 ms和传统遗传算法的5.9ms,相比于三环参数整定法系统达到稳态所需要的时间减少了89.4%;采用改进的自适应遗传算法后正弦信号的平均相对跟随误差绝对值为24.70%,优于"三环参数整定法"和传统遗传算法的51.02%和24.77%。因此,改进的自适应遗传算法在解决直线电机伺服系统多控制参数同步优化问题时,性能优于"三环参数整定法"和传统遗传算法。Abstract: As it is difficult to obtain the reasonable control parameters of linear motor feed servo system by using the traditional methods, the improved adaptive genetic algorithm was proposed to optimize these five control parameters of the linear motor servo system simultaneously. The control principle of the linear motor feed system was analyzed, and the real number coding was adopted to encode the control parameters and generate the population. According to the control requirements, the fitness function composed of the error integral term, the overshoot punish term and the stability time term was determined, and the algorithm was improved by using the nonlinear adaptive crossover rate and mutation rate to accelerate the convergence speed of genetic algorithm and avoid plunging into local convergence. The simulation results show that the stability time of the improved adaptive genetic algorithm is 4.1 ms better than 39ms of the "three-loop parameter setting method" and 5.9ms of the traditional genetic algorithm under the condition of ensuring the system without overshoot. The time required to reach the steady state of the system is reduced by 89.4% comparing with the "three-loop parameter setting method". The average relative following error of the sine signal after the improved adaptive genetic algorithm is 24.70%, which is better than 51.02% of the "three-loop parameter setting method" and 24.77% of the traditional genetic algorithm. Therefore, the improved adaptive genetic algorithm is superior to the "three-loop parameter setting method" and traditional genetic algorithm in the synchronous optimization of multi-control parameters of linear motor servo system.
-
Key words:
- linear motor /
- parameter optimization /
- feed servo systems /
- genetic algorithm
-
表 1 三种不同方法优化控制参数结果对比
优化方法 Ki Ti Kv Tv Kp 稳定时间/ms 正弦平均跟随误差/% 三环整定方法 13.453 0.005 133 261.67 0.001 2 208.333 39.0 51.02 传统遗传算法 30.625 0.121 8 356.617 4 0.993 7 791.853 5.9 24.77 自适应遗传算法 23.301 0.800 9 339.603 6 0.668 4 796.857 4.1 24.70  下载: 导出CSV
下载: 导出CSV
-
[1] Renton D, Elbestawi M A. Motion control for linear motor feed drives in advanced machine tools[J]. International Journal of Machine Tools and Manufacture, 2001, 41(4):479-507 doi: 10.1016/S0890-6955(00)00089-4 [2] Hsieh M F, Tung C J, Yao W S, et al. Servo design of a vertical axis drive using dual linear motors for high speed electric discharge machining[J]. International Journal of Machine Tools and Manufacture, 2007, 47(3-4):546-554 doi: 10.1016/j.ijmachtools.2006.05.011 [3] Yang X J, Lu D, Zhang J, et al. Investigation on the displacement fluctuation of the linear motor feed system considering the linear encoder vibration[J]. International Journal of Machine Tools and Manufacture, 2015, 98:33-40 doi: 10.1016/j.ijmachtools.2015.09.005 [4] Yang X J, Lu D, Zhang J, et al. Dynamic electromechanical coupling resulting from the air-gap fluctuation of the linear motor in machine tools[J]. International Journal of Machine Tools and Manufacture, 2015, 94:100-108 doi: 10.1016/j.ijmachtools.2015.04.004 [5] 张庆州, 杨继平, 贾健明, 等.伺服控制在离心叶轮数控加工中的应用研究[J].战术导弹技术, 2015(3):60-65 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zsddjs201503012Zhang Q Z, Yang J P, Jia J M, et al. Research on servo control in CNC machining centrifugal Impeller[J]. Tactical Missile Technology, 2015(3):60-65(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zsddjs201503012 [6] 郭亮, 梅雪松, 张东升, 等.840D数控系统的伺服参数优化[J].机电工程, 2011, 28(4):444-447 doi: 10.3969/j.issn.1001-4551.2011.04.015Guo L, Mei X S, Zhang D S, et al. Servo parameters tuning for SINUMERIK 840D and 611D[J]. Journal of Mechanical & Electrical Engineering, 2011, 28(4):444-447(in Chinese) doi: 10.3969/j.issn.1001-4551.2011.04.015 [7] Hidalgo D, Yeh S H, Lee J I. A frequency domain approach for tuning control parameters of CNC servomotors to enhance its circular contouring accuracy[J]. Procedia CIRP, 2017, 63:372-377 doi: 10.1016/j.procir.2017.03.084 [8] 林献坤, 李裴祥, 朱琳.基于动刚度评价的直接进给轴伺服参数优化方法[J].中国机械工程, 2015, 26(18):2501-2505 doi: 10.3969/j.issn.1004-132X.2015.18.016Lin X K, Li P X, Zhu L. Servo parameter tuning method for direct feed drive based on dynamic stiffness evaluation[J]. China Mechanical Engineering, 2015, 26(18):2501-2505(in Chinese) doi: 10.3969/j.issn.1004-132X.2015.18.016 [9] 郝齐, 关立文, 王立平.基于遗传算法并联机床电机伺服系统控制参数整定[J].清华大学学报, 2010, 50(11):1801-1806 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qhdxxb201011011Hao Q, Guan L W, Wang L P. GA-based control parameter tuning of parallel machine tool motor servo systems[J]. Journal of Tsinghua University, 2010, 50(11):1801-1806(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qhdxxb201011011 [10] 刘成颖, 刘龙飞, 孟凡伟, 等.基于遗传算法的永磁直线同步电机伺服系统参数设计[J].清华大学学报, 2012, 52(12):1751-1757 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qhdxxb201212018Liu C Y, Liu L F, Meng F W, et al. Genetic algorithm based parameter selection of permanent magnet linear synchronous motor servo system design[J]. Journal of Tsinghua University, 2012, 52(12):1751-1757(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qhdxxb201212018 [11] 李燕.直线电机进给系统运动平稳性分析及伺服参数优化方法研究[D].西安: 西安交通大学, 2016Li Y. Research on motion smoothness and servo parameter optimization of PMSLM feed system[D]. Xi'an: Xi'an Jiaotong University, 2016(in Chinese) [12] 滕峰成, 林晓乐, 郝宇, 等.基于非线性GA算法的MFF透射模型的参数辨识与优化[J].仪器仪表学报, 2016, 37(2):286-293 doi: 10.3969/j.issn.0254-3087.2016.02.007Teng F C, Lin X L, Hao Y, et al. Parameter identification and optimization of MFF transmission model based on nonlinear genetic algorithm[J]. Chinese Journal of Scientific Instrument, 2016, 37(2):286-293(in Chinese) doi: 10.3969/j.issn.0254-3087.2016.02.007 [13] 刘浩然, 赵翠香, 李轩, 等.一种基于改进遗传算法的神经网络优化算法研究[J].仪器仪表学报, 2016, 37(7):1573-1580 doi: 10.3969/j.issn.0254-3087.2016.07.017Liu H R, Zhao C X, Li X, et al. Study on a neural network optimization algorithm based on improved genetic algorithm[J]. Chinese Journal of Scientific Instrument, 2016, 37(7):1573-1580(in Chinese) doi: 10.3969/j.issn.0254-3087.2016.07.017 [14] 陈再高, 王建国, 王玥, 等.基于粒子模拟和并行遗传算法的高功率微波源优化设计[J].物理学报, 2013, 62(16):168402 doi: 10.7498/aps.62.168402Chen Z G, Wang J G, Wang Y, et al. Optimal design of high-power microwave source based on particle simulation and genetic algorithms[J]. Acta Physica Sinica, 2013, 62(16):168402(in Chinese) doi: 10.7498/aps.62.168402 [15] 程博, 杨育, 刘爱军, 等.基于遗传模拟退火算法的大件公路运输路径选择优化[J].计算机集成制造系统, 2013, 19(4):879-887 http://d.old.wanfangdata.com.cn/Periodical/jsjjczzxt201304025Cheng B, Yang Y, Liu A J, et al. Highway transportation route selection optimization based on improved genetic annealing algorithm[J]. Computer Integrated Manufacturing Systems, 2013, 19(4):879-887(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jsjjczzxt201304025 [16] 邝航宇, 金晶, 苏勇.自适应遗传算法交叉变异算子的改进[J].计算机工程与应用, 2006, 42(12):93-96, 99 doi: 10.3321/j.issn:1002-8331.2006.12.028Kuang H Y, Jin J, Su Y. Improving crossover and mutation for adaptive genetic algorithm[J]. Computer Engineering and Applications, 2006, 42(12):93-96, 99(in Chinese) doi: 10.3321/j.issn:1002-8331.2006.12.028 [17] Feng B, Zhang D, Yang J, et al. Control parameters auto-tuning for bi-axial servo feed system[J]. Procedia CIRP, 2014, 17:841-846 doi: 10.1016/j.procir.2014.01.052 [18] 王雷, 李明, 蔡劲草, 等.改进遗传算法在移动机器人路径规划中的应用研究[J].机械科学与技术, 2017, 36(5):711-716 doi: 10.13433/j.cnki.1003-8728.2017.0509Wang L, Li M, Cai J C, et al. Research on mobile robot path planning by using improved genetic algorithm[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(5):711-716(in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0509 -





 点击查看大图
点击查看大图

图(10) / 表(1)
计量
- 文章访问数: 614
- HTML全文浏览量: 181
- PDF下载量: 46
- 被引次数: 0
