




Versine Curve Acc/Dec Snap Continuous Control Algorithm
-
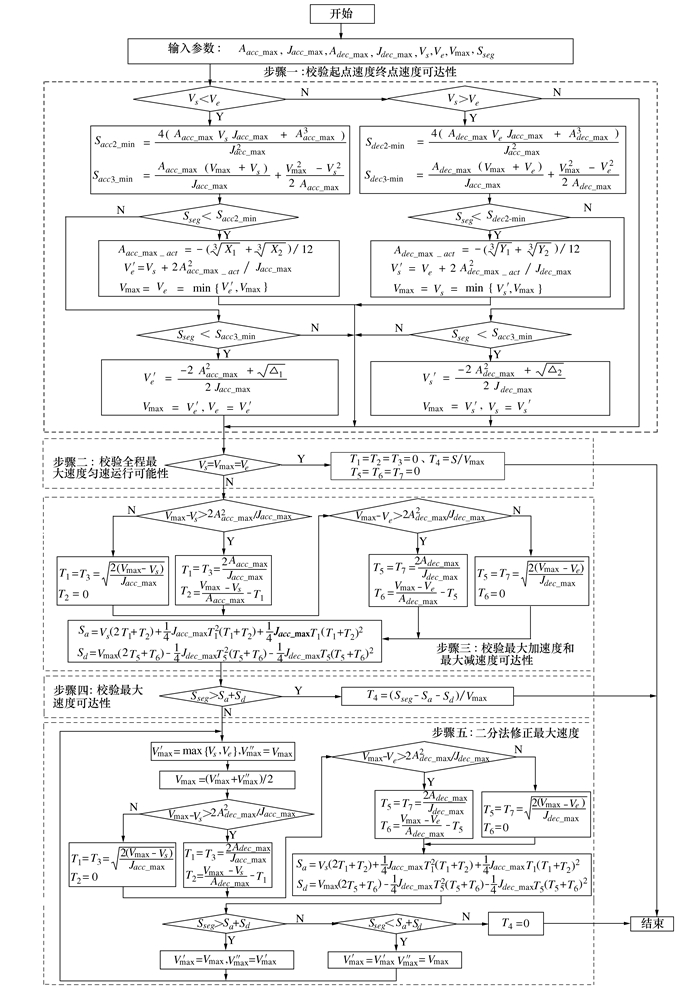
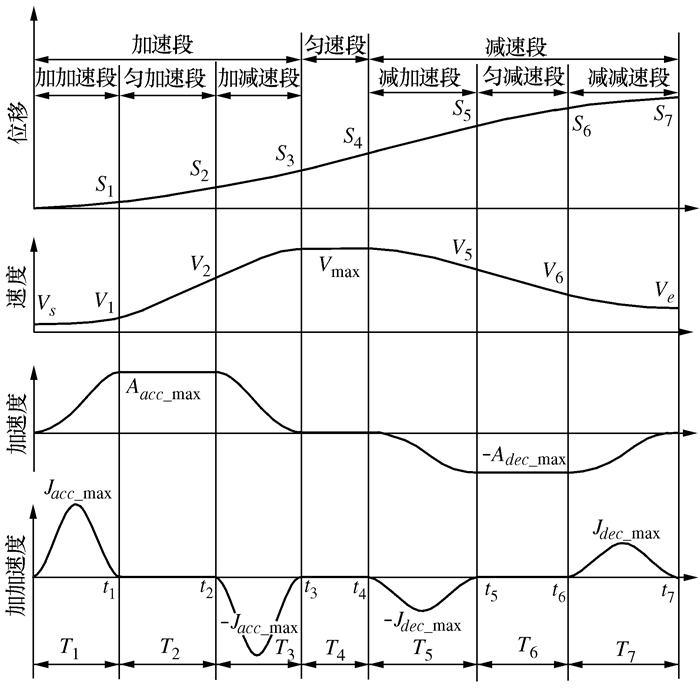
摘要: 针对传统的加减速算法如S型曲线加加速度不连续、正弦型曲线加加加速度(snap)不连续导致进给过程中存在柔性冲击等问题,提出snap连续的全类型非对称七段式正矢曲线加减速控制算法。通过利用系统最优机械性能,分析最大加、减速度和最大速度的可达性,规划17种速度曲线类型;针对给定轨迹段长度小于系统从起点速度运动到终点速度所需最短轨迹段长的问题,给出该算法下基于给定轨迹段长约束的起点速度和终点速度的可达性校验方法,同时采用盛金公式修正起点速度和终点速度。在自主开发的多轴运动控制器验证所提出的snap连续的全类型非对称七段式正矢曲线加减速控制算法。实验结果表明:在保证snap连续以提高系统柔性及最大加、减速度和最大速度不超限情况下,该算法可规划出17种速度曲线类型;在给定轨迹段长度较短系统无法从起点速度运动到终点速度的情形下,该算法解决起点速度和终点速度的可达性校验及修正问题。Abstract: For the traditional acceleration and deceleration algorithms such as S-curve jerk discontinuity, sinusoidal curve snap discontinuity leads to flexible impact in the feed process, an acceleration & deceleration snap continuous control algorithm with asymmetric seven-segment versine curve is proposed in this paper. Considering the optimal mechanical performance of the system, by analyzing the maximum acceleration, maximum deceleration and maximum speed accessibility, 17 types of speed curves are planned; Aiming at the problem that the length of a given trajectory segment is smaller than the shortest trajectory segment length required for the system to move from the starting velocity to the ending velocity, a method for verifying the reachability of the starting velocity and the ending velocity based on the length constraint of the given trajectory segment is proposed. Meanwhile, the Shengjin formula is used to correct the starting speed and the ending speed. The self-developed multi-axis motion controller verifies the proposed all-type asymmetric seven-segment versine curve acceleration & deceleration snap continuous control algorithm. The experimental results show that the algorithm can plan 17 types of speed curves under the condition that the snap is continuous to improve system flexibility and the maximum acceleration, the maximum deceleration and the maximum speed are not exceeded. The problem of reachability check and correction of starting speed and ending speed under constraint of a given trajectory length can be solved.
-
Key words:
- versine curve /
- asymmetric /
- seven-segment /
- Shengjin formula /
- reachability checking /
- jerk
-
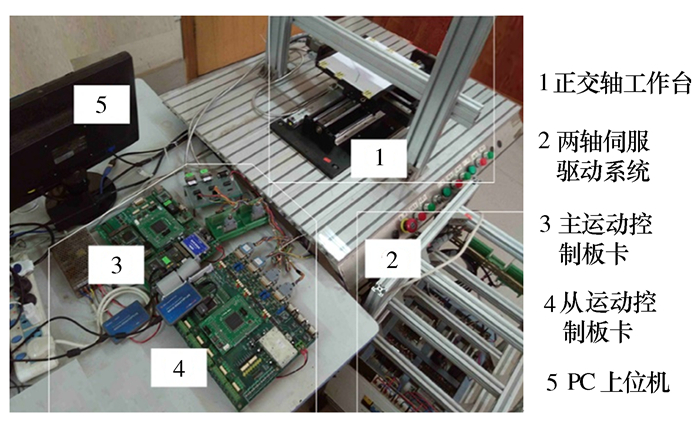
表 1 简易运动控制系统平台相关系数
核心部件 型号 相关参数 主运动控制器 DSP(TMS32C6655) 主频1.5GHz; CCS7.2.0 从运动控制器 DSP(TMS32C6713) 主频200MHz; CCS3.3 FIFO FPGA XILINX XC3S400A:16bit*32 DPRAM FPGA Altera CYCLONE V 5CEFA4F23C8N 四轴运动控制器 FPGA Altera CYCLONE III EP3C40F484C8 伺服驱动器 松下A4(MADDT1205003) 三环控制:位置、速度、转矩 伺服电机 松下A4(MSMD012P1U) 额定转速3 000 r/min; 2 500脉冲/转; 滚珠丝杠 —— 导程4 mm  下载: 导出CSV
下载: 导出CSV
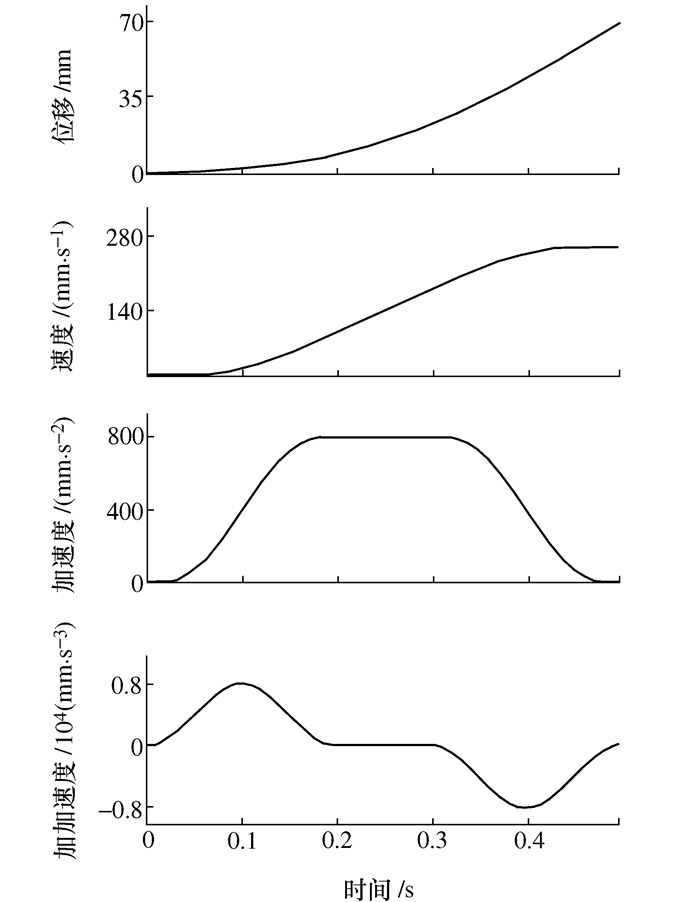
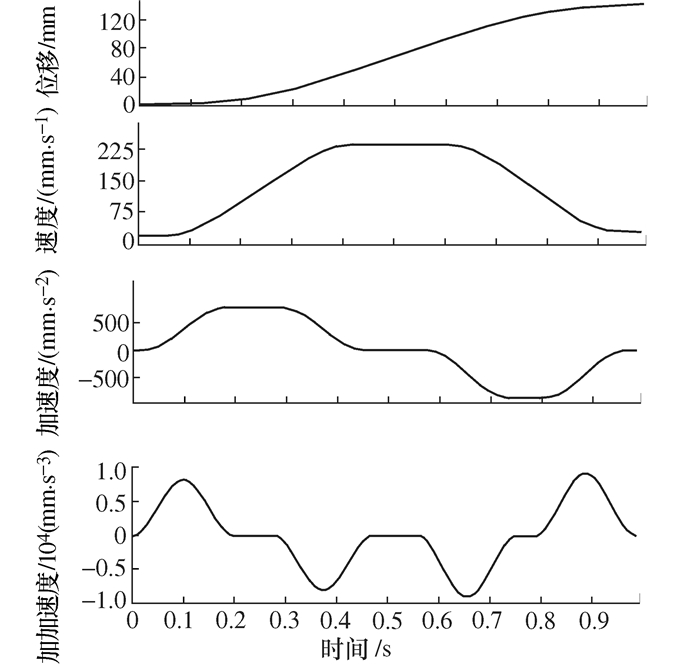
表 2 17种类型参数曲线的轨迹参数
实验组别 参数曲线类型 轨迹段长/mm 起点速度/(mm·s-1) 终点速度/(mm·s-1) 最大速度/(mm·s-1) 1 1 4.000 20.000 60.000 60.000 2 2 10.000 20.000 60.000 60.000 3 3 70.000 20.000 300.000 300.000 4 4 120.000 20.000 300.000 300.000 5 5 4.000 60.000 20.000 60.000 6 6 10.000 60.000 20.000 60.000 7 7 70.000 300.000 20.000 300.000 8 8 120.000 300.000 20.000 300.000 9 9 10.000 20.000 30.000 60.000 10 10 100.000 20.000 120.000 240.000 11 11 100.000 120.000 20.000 240.000 12 12 110.000 20.000 30.000 240.000 13 13 20.000 20.000 30.000 60.000 14 14 140.000 20.000 120.000 240.000 15 15 140.000 120.000 20.000 240.000 16 16 140.000 20.000 30.000 240.000 17 17 10.000 20.000 20.000 20.000
下载: 导出CSV
表 3 17种类型轨迹参数加减速控制各运动段运动时间
组别 线型 七个运动段时间/ms T1 T2 T3 T4 T5 T6 T7 1 1 0.068 0 0.068 0 0 0 0 2 2 0.100 0 0.100 0.033 0 0 0 3 3 0.200 0.100 0.200 0. 0 0 0 4 4 0.200 0.150 0.200 0.107 0 0 0 5 5 0 0 0 0 0.067 0 0.067 6 6 0 0 0 0.041 0.094 0 0.094 7 7 0 0 0 0 0.200 0.080 0.200 8 8 0 0 0 0.127 0.200 0.111 0.200 9 9 0.081 0 0.081 0 0.060 0 0.060 10 10 0.200 0.042 0.200 0 0.144 0 0.144 11 11 0.153 0 0.153 0 0.200 0 0.200 12 12 0.200 0.058 0.200 0 0.200 0.018 0.200 13 13 0.100 0 0.100 0.078 0.082 0 0.082 14 14 0.200 0.075 0.200 0.081 0.163 0 0.163 15 15 0.173 0 0.173 0.083 0.200 0.044 0.200 16 16 0.200 0.075 0.200 0.082 0.200 0.033 0.200 17 17 0 0 0 0.500 0 0 0
下载: 导出CSV
-
[1] 翁祖昊, 杨煜普.基于5次多项式的实时可变Jmax加减速算法研究[J].电机与控制应用, 2015, 42(3):34-37 doi: 10.3969/j.issn.1673-6540.2015.03.009Weng Z H, Yang Y P. Research on real-time adjustable Jmax acceleration and deceleration algorithm based on quintic[J]. Electric Machines & Control Application, 2015, 42(3):34-37(in Chinese) doi: 10.3969/j.issn.1673-6540.2015.03.009 [2] Yang X D, Wang S. Design of third-order uniform acceleration and deceleration trajectory based on simulink stateflow[J]. IOP Conference Series:Materials Science and Engineering, 2017, 374(1):012037 http://d.old.wanfangdata.com.cn/Periodical/xddzjs201909024 [3] 江勇, 刘宗凯, 周本谋, 等.步进电机加减速控制优化设计[J].信息技术, 2017(06):6-9 http://d.old.wanfangdata.com.cn/Periodical/xxjs201706002Jiang Y, Liu Z K, Zhou B M, et al. Optimization design of acceleration and deceleration control for stepping motor[J]. Information Technology, 2017(6):6-9 http://d.old.wanfangdata.com.cn/Periodical/xxjs201706002 [4] 胡永安, 陈彩凤, 杨萌.基于Matlab的S曲线加减速控制算法研究[J].电子科技, 2017, 30(4):60-63, 169 http://d.old.wanfangdata.com.cn/Periodical/dzkj201704015Hu Y A, Chen C F, Yang M. Research of S curve acceleration and deceleration control algorithm based on Matlab[J]. Electronic Science and Technology, 2017, 30(4):60-63, 169 http://d.old.wanfangdata.com.cn/Periodical/dzkj201704015 [5] Jeon J W, Ha Y Y. A generalized approach for the acceleration and deceleration of industrial robots and CNC machine tools[J]. IEEE Transactions on Industrial Electronics, 2000, 47(1):133-139 doi: 10.1109/41.824135 [6] Lu T C, Chen S L. Genetic algorithm-based S-curve acceleration and deceleration for five-axis machine tools[J]. International Journal of Advanced Manufacturing Technology, 2016, 87(1-4):219-232 doi: 10.1007/s00170-016-8464-0 [7] 宋清玉, 郭宝峰, 李建, 等.伺服压力机柔性加减速控制算法[J].农业机械学报, 2013, 44(6):269-273 http://d.old.wanfangdata.com.cn/Periodical/ycjs201402009Song Q Y, Guo B F, Li J, et al. Flexible acceleration and deceleration control algorithm for servo press[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6):269-273(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ycjs201402009 [8] 吕志翔.基于速度波动最小化的NURBS曲线前瞻与插补算法研究[D].上海: 上海交通大学, 2014 http://cdmd.cnki.com.cn/Article/CDMD-10248-1015027317.htmLv Z X. Research of look-ahead and interpolation method for NURBS curves withminimal feed fluctuation[D]. Shanghai: Shanghai Jiao Tong University, 2014(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10248-1015027317.htm [9] 史步海, 郭协涛.基于EMC2的S形加减速控制算法[J].组合机床与自动化加工技术, 2013(6):30-33, 36 doi: 10.3969/j.issn.1001-2265.2013.06.009Shi B H, Guo X T. S-shaped acceleration and deceleration control algorithm for EMC2[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2013(6):30-33, 36(in Chinese) doi: 10.3969/j.issn.1001-2265.2013.06.009 [10] 林仕高, 刘晓麟, 欧元贤.机械手笛卡尔空间轨迹规划研究[J].机械设计与制造, 2013(3):49-52 http://d.old.wanfangdata.com.cn/Periodical/jxsjyzz201303016Lin S G, Liu X L, Ou Y X. The study of trajectory planning of manipulator in Cartesian space[J]. Machinery Design & Manufacture, 2013(3):49-52(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxsjyzz201303016 [11] 孙建仁, 胡赤兵, 王保民.一种Jerk连续的正弦函数平方曲线加减速算法研究[J].制造技术与机床, 2010(12):158-161 doi: 10.3969/j.issn.1005-2402.2010.12.048Sun J R, Hu C B, Wang B M. Research on a squared sine function shape curve acceleration and deceleration algorithm of continuous Jerk[J]. Manufacturing Technology & Machine Tool, 2010(12):158-161(in Chinese) doi: 10.3969/j.issn.1005-2402.2010.12.048 [12] Nguyen K D, Ng T C, Chen I M. On algorithms for planning s-curve motion profiles[J]. International Journal of Advanced Robotic Systems, 2008, 5(1):99-106 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_0aedc5c4db13c44082230b4eba96d63a [13] 潘海鸿, 杨微, 陈琳, 等.全程S曲线加减速控制的自适应分段NURBS曲线插补算法[J].中国机械工程, 2010, 21(2):190-195 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjxgc201002014Pan H H, Yang W, Chen L, et al. Adaptive piecewise NURBS Curve interpolator algorithm for entireness process S-curve ACC/DEC control[J]. China Mechanical Engineering, 2010, 21(2):190-195(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjxgc201002014 [14] 潘海鸿, 杨增启, 陈琳, 等.一种适用于前瞻的高精度7段式非对称S曲线加减速控制[J].机械科学与技术, 2015, 34(7):1024-1030 doi: 10.13433/j.cnki.1003-8728.2015.0710Pan H H, Yang Z Q, Chen L, et al. A high-precision acceleration and deceleration control of 7-segment dissymmetrical S-shape curve for look-ahead[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(7):1024-1030(in Chinese) doi: 10.13433/j.cnki.1003-8728.2015.0710 [15] 张振华.数控系统加减速算法及定位技术研究[D].大连: 大连理工大学, 2007Zhang Z H. Study on the acceleration/deceleration algorithm and positioning technology of CNC system[D]. Dalian: Dalian University of Technology, 2007(in Chinese) [16] 商允舜.CNC数控系统加减速控制方法研究与实现[D].杭州: 浙江大学, 2006 http://cdmd.cnki.com.cn/Article/CDMD-10335-2006175592.htmShang Y S. Study and realization of acceleration/deceleration control for CNC system[D]. Hangzhou: Zhejiang University, 2006(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10335-2006175592.htm -



 点击查看大图
点击查看大图
图(7) / 表(3)
计量
- 文章访问数: 634
- HTML全文浏览量: 291
- PDF下载量: 40
- 被引次数: 0
