




Structural Design and Performance Analysis of a Planar 3-DOF Compliant Mechanism
-
摘要: 采用并联原型机构微分雅克比矩阵与实体各向同性材料惩罚函数法(Solid isotropic material with penalization,SIMP)相结合的拓扑优化方法,以柔度最小和低阶模态频率最大为多设计目标,建立平面三自由度柔顺机构拓扑优化模型实现拓扑优化。以拓扑优化得到的模型边界为形状优化为设计变量,对拓扑优化模型应力与末端位移约束为优化目标进行二次优化。采用增材制造方法3D打印技术对平面三自由度柔顺机构拓扑构型进行加工,并采用雷尼绍双频激光干涉仪进行测量与数据采集。实验与有限元仿真对比结果表明:采用多目标拓扑优化和形状优化组合形成二次优化,运用二次优化方法设计得到的平面三自由度柔顺并联机构,在满足机构具有很好的整体刚度要求下,拥有很高的低阶模态频率实现振动拟制,而且能够实现微纳尺度位移运动特性。Abstract: A topological optimization method combines the differential Jacobian matrix of the parallel prototype mechanism with the solid isotropic material with penalization. Taking the minimum structural compliance and the maximum modal frequency as multi-objective, we establish the planar 3 degree-of-freedom (DOF) compliant mechanism's topological optimization model. Using the topological optimization model's boundary as the shape optimization design variable, the stress and moving platform displacement constraints were optimized twice. The twice optimization model was established with the 3D printing method, and the moving platform displacement data were measured and collected by using the Renishaw dual-frequency laser interferometer. Experimental results and finite element simulation results show that:the planar 3-DOF compliant mechanism designed by combining multi-objective topological optimization with shape optimization and using twice optimization has a low-order modal frequency to realize vibration fitting, thus satisfying the requirements of the planar compliant mechanism with good overall stiffness and realizing micro/nano-scale displacement movement.
-
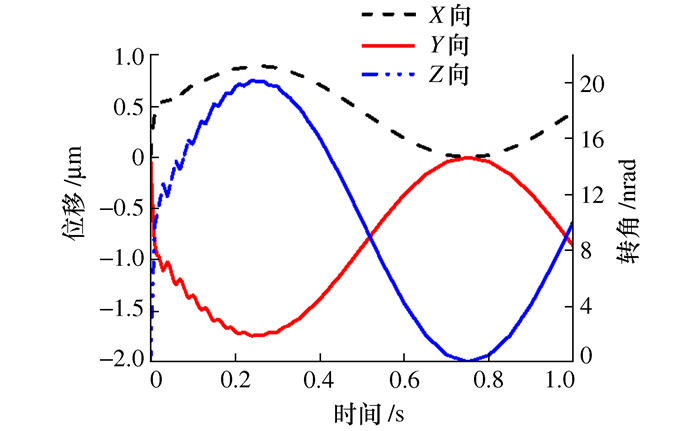
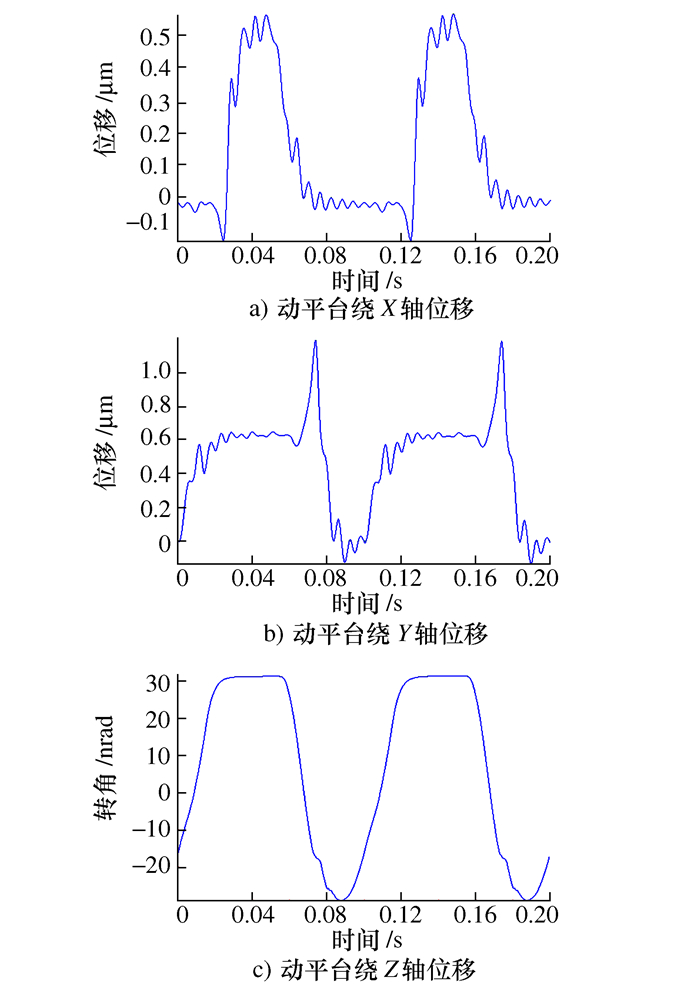
表 1 柔顺机构理论、实验、仿真分析位移
方向 理论计算 仿真分析 实验分析 X轴/μm -0.822 9 0.895 0.572 Y轴/μm -0.763 7 -1.74 1.193 Z轴/nrad 31.2 20.2 31.2  下载: 导出CSV
下载: 导出CSV
-
[1] 王华.平面三自由度柔顺精密定位平台的优化设计[D].广东汕头: 汕头大学, 2005 http://cdmd.cnki.com.cn/Article/CDMD-10560-2005125822.htmWang H. Optimal design of planar 3-DOF micro-positioning stage with flexible mechanism[D]. Guangdong Shantou: Shantou University, 2005(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10560-2005125822.htm [2] 胡俊峰, 张宪民.3自由度精密定位平台的运动特性和优化设计[J].光学精密工程, 2012, 20(12):2686-2695 http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201212015Hu J F, Zhang X M. Kinematical properties and optimal design of 3-DOF precision positioning stage[J]. Optics and Precision Engineering, 2012, 20(12):2686-2695(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201212015 [3] 黄兴山, 卢清华, 何琼.3自由度混合柔性铰链微定位平台的设计与分析[J].机床与液压, 2018, 46(7):102-104 doi: 10.3969/j.issn.1001-3881.2018.07.023Huang X S, Lu Q H, He Q. Design and analysis of 3-DOF hybrid flexure hinge micro positioning stage[J]. Machine Tool & Hydraulics, 2018, 46(7):102-104(in Chinese) doi: 10.3969/j.issn.1001-3881.2018.07.023 [4] 马立, 杨斌, 田应仲, 等.3-PRR平面三自由度纳米定位平台的设计[J].光学精密工程, 2017, 25(7):1866-1873 http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201707022Ma L, Yang B, Tian Y Z, et al. Design of 3-DOF planar nano-positioning platform with 3-PRR structure[J]. Optics and Precision Engineering, 2017, 25(7):1866-1873(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201707022 [5] 贾晓辉, 刘今越.3-PRR柔性并联机构的优化设计[J].机械设计, 2014, 31(1):26-29 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201401006Jia X H, Liu J Y. Optimal design and simulations of a 3-PRR flexure-based parallel mechanism[J]. Journal of Machine Design, 2014, 31(1):26-29(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201401006 [6] 贺磊, 吉晓民, 杨先海, 等.并联Roberts柔性机构及其微定位平台的结构与位移分析[J].机械强度, 2015, 37(6):1057-1063 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxqd201506011He L, Ji X M, Yang X H, et al. Structure and displacement analysis for compliant parallel roberts mechanism and micro-positioning stage[J]. Journal of Mechanical Strength, 2015, 37(6):1057-1063(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxqd201506011 [7] Sigmund O. A 99 line topology optimization code written in Matlab[J]. Structural and Multidisciplinary Optimization, 2001, 21(2):120-127 doi: 10.1007/s001580050176 [8] Liu K, Tovar A. An efficient 3D topology optimization code written in Matlab[J]. Structural and Multidisciplinary Optimization, 2014, 50(6):1175-1196 doi: 10.1007/s00158-014-1107-x [9] 金莫辉.基于伪刚体模型和雅克比矩阵的柔顺机构拓扑优化方法[D].广州: 华南理工大学, 2016 http://cdmd.cnki.com.cn/Article/CDMD-10561-1016737112.htmJin M H. Topology optimization methods of compliant mechanisms based on PRBM and jacobian maatrix[D]. Guangzhou: South China University of Technology, 2016(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10561-1016737112.htm [10] Bendsøe M P, Sigmund O. Topology optimization: Theory, methods, and applications[M]. 2nd ed. New York: Springer, 2004 [11] 朱大昌, 宋马军.平面整体式三自由度全柔顺并联机构拓扑优化构型设计及振动频率分析[J].振动与冲击, 2016, 35(3):27-33, 40 http://d.old.wanfangdata.com.cn/Periodical/zdycj201603007Zhu D C, Song M J. Configuration design with topology optimization and vibration frequency analysis for 3-DOF planar integrated fully compliant parallel mechanism[J]. Journal of Vibration and Shock, 2016, 35(3):27-33, 40(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zdycj201603007 [12] 朱大昌, 宋马军.基于多目标拓扑优化的全柔顺并联机构构型固有振动频率研究[J].中国机械工程, 2015, 26(13):1794-1801 doi: 10.3969/j.issn.1004-132X.2015.13.016Zhu D C, Song M J. Research on natural vibration frequency of fully compliant parallel mechanism configuration based on multi-objective topology optimization[J]. China Mechanical Engineering, 2015, 26(13):1794-1801(in Chinese) doi: 10.3969/j.issn.1004-132X.2015.13.016 [13] Wang G, Zhu D C, Liu N, et al. Multi-objective topology optimization of a compliant parallel planar mechanism under combined load cases and constraints[J]. Micromachines, 2017, 8(9):279 doi: 10.3390/mi8090279 [14] 覃琨, 方宗德, 卞翔, 等.基于MATLAB的机械零件拓扑优化结果几何重构研究[J].机械科学与技术, 2013, 32(11):1620-1623 http://d.old.wanfangdata.com.cn/Periodical/jxkxyjs201311012Qin K, Fang Z D, Bian X, et al. CAD model reconstruction from topology optimization results based on MATLAB process[J]. Mechanical Science and Technology for Aerospace Engineering, 2013, 32(11):1620-1623(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxkxyjs201311012 [15] 付永清, 朱健璎, 金周晟.柔顺机构拓扑优化设计中的拓扑图提取综述[J].组合机床与自动化加工技术, 2017(5):1-4 http://d.old.wanfangdata.com.cn/Periodical/zhjc201705001Fu Y Q, Zhu J Y, Jin Z S. Topology extraction synthesis in the topology optimization design of compliant mechanisms[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2017(5):1-4(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zhjc201705001 -



 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 458
- HTML全文浏览量: 221
- PDF下载量: 44
- 被引次数: 0
