




Exploring Single Steering Wheel AGV Path Tracking Controller
-
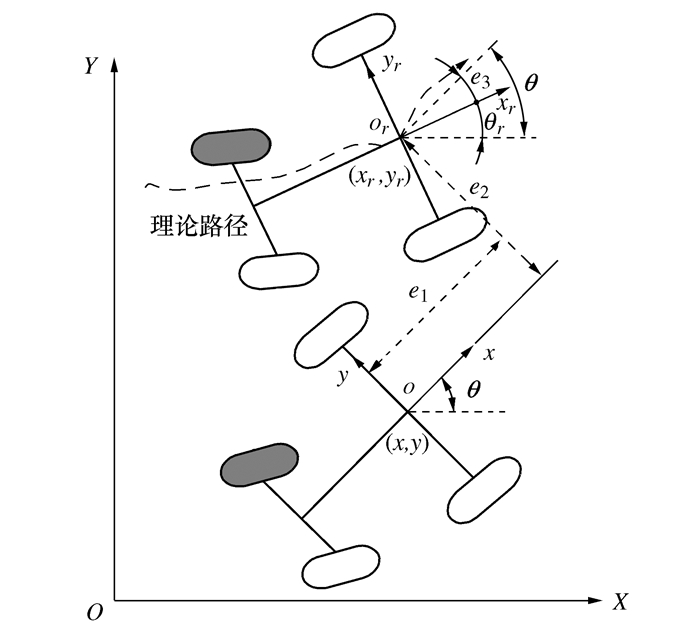
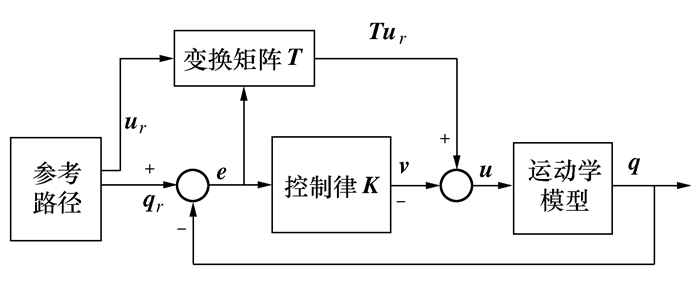
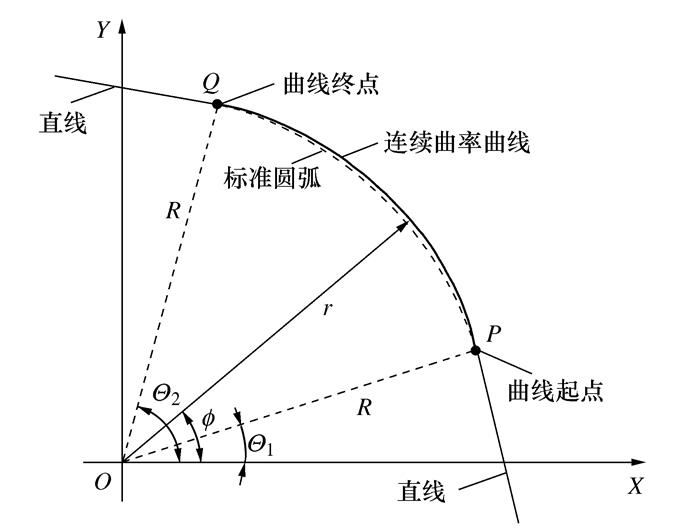
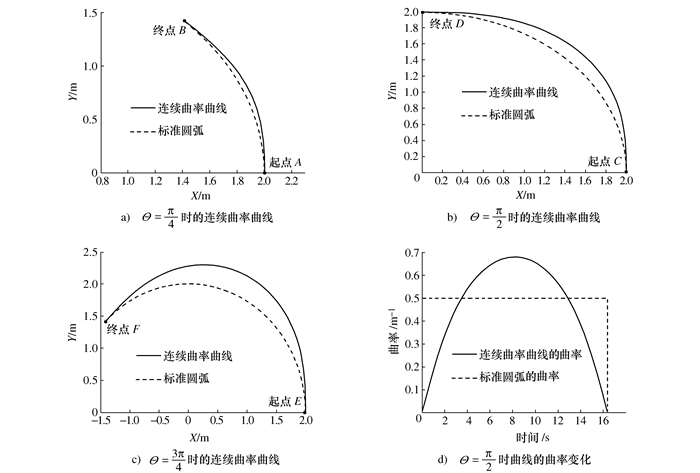
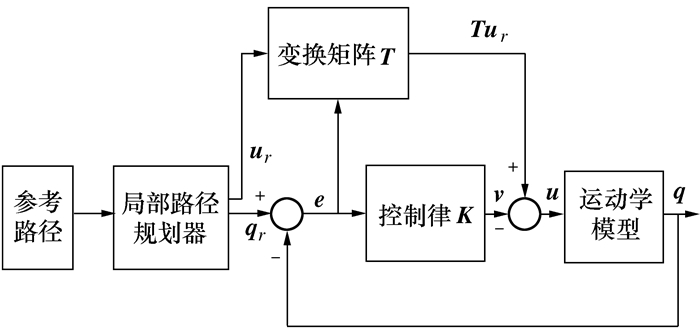
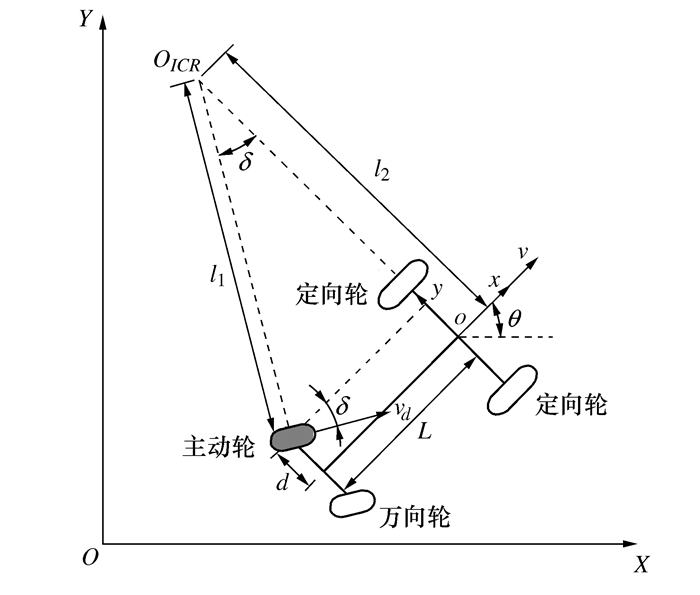
摘要: 针对单舵轮AGV路径跟踪问题,建立了其运动学模型和位姿误差模型,以位姿误差和前馈控制作为输入,以舵轮速度和舵轮偏转角作为输出,设计了单舵轮AGV的路径跟踪控制器。考虑到参考路径在直线与标准圆弧过渡处的曲率突变对单舵轮AGV路径跟踪精度和平稳性的影响,设计了一种基于连续曲率曲线的局部路径规划方法,并应用于路径跟踪控制器中。通过仿真和样机实验,单舵轮AGV在稳定状态左右摆差可达,验证了该控制方法的有效性和可行性。Abstract: The kinematics model and attitude error model of the single steering wheel AGV path tracking problem are established. Then, using the attitude error and feedforward control as input and the steering wheel speed and the steering wheel deflection angle as output, the single steering wheel AGV path tracking controller is designed. Considering the influence of the curvature mutation of the reference path at the transition between the straight line and the standard arc on the tracking precision and stability of the single steering wheel AGV path, a local path planning method based on continuous curvature is designed and applied to the path tracking controller. Finally, the simulation and prototype experimental results show that the single steering wheel AGV has a swing of about in its steady state, thus verifying the effectiveness and feasibility of the tracking controller.
-
Key words:
- path tracking /
- single steering wheel AGV /
- local path planning /
- continuous curvature
-
表 1 控制参数的敏感性分析表
参数 数值 调整幅度 最大跟随位姿误差 e1/m e2/m e3/rad 2.25 -10% -0.2403 -0.5 1.0032 k1 2.5 0 -0.2463 -0.5 1.0113 2.75 10% -0.2514 -0.5 1.0183 21.6 -10% -0.2379 -0.5 0.9511 k2 24 0 -0.2463 -0.5 1.0113 26.4 10% -0.2536 -0.5 1.0681 1.8 -10% -0.2516 -0.5 1.0670 k3 2 0 -0.2463 -0.5 1.0113 2.2 10% -0.2411 -0.5 0.9511  下载: 导出CSV
下载: 导出CSV
-
[1] Huang J S, Wen C Y, Wang W, et al. Adaptive output feedback tracking control of a nonholonomic mobile robot[J]. Automatica, 2014, 50(3):821-831 doi: 10.1016/j.automatica.2013.12.036 [2] 刘进, 齐晓慧, 李永科.基于机器视觉的AGV路径跟踪[J].火力与指挥控制, 2010, 35(8):132-135, 146. doi: 10.3969/j.issn.1002-0640.2010.08.035Liu J, Qi X H, Li Y K. Research on the AGV path following based on machine vision[J]. Fire Control & Command Control, 2010, 35(8):132-135, 146(in Chinese) doi: 10.3969/j.issn.1002-0640.2010.08.035 [3] 王川, 吴怀宇, 王芬, 等.基于Backstepping的移动机器人轨迹跟踪控制[J].现代电子技术, 2008, 31(24):113-115, 119 doi: 10.3969/j.issn.1004-373X.2008.24.035Wang C, Wu H Y, Wang F, et al. Trajectory tracking control of mobile robots based on Backstepping[J]. Modern Electronics Technique, 2008, 31(24):113-115, 119(in Chinese) doi: 10.3969/j.issn.1004-373X.2008.24.035 [4] Chen D D, Shi Z Y, Yuan P J, et al. Trajectory tracking control method and experiment of AGV[C]//Proceedings of the 14th International Workshop on Advanced Motion Control. Auckland, New Zealand: IEEE, 2016: 24-29 https://ieeexplore.ieee.org/document/7496323 [5] Kar A K, Dhar N K, Chandola R, et al. Trajectory tracking by automated guided vehicle using GA optimized sliding mode control[C]//Proceedings of the 11th International Conference on Industrial and Information Systems. Roorkee, India: IEEE, 2016: 71-76 [6] Li S J, Zhang G L, Lei X Y, et al. Trajectory tracking control of a unicycle-type mobile robot with a new planning algorithm[C]//Proceedings of 2017 IEEE International Conference on Robotics and Biomimetics. Macau, China: IEEE, 2017: 780-786 [7] Tamba T A, Hong B, Hong K S. A path following control of an unmanned autonomous forklift[J]. International Journal of Control, Automation and Systems, 2009, 7(1):113-122 doi: 10.1007/s12555-009-0114-y [8] Widyotriatmo A, Hong K S. Navigation function-based control of multiple wheeled vehicles[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5):1896-1906 doi: 10.1109/TIE.2010.2051394 [9] Murray R M, Sastry S S. Nonholonomic motion planning:steering using sinusoids[J]. IEEE Trans actions on Automatic Control, 1993, 38(5):700-716 doi: 10.1109/9.277235 [10] Reyhanoglu M, Geluk T. Switched feedback tracking control of a nonholonomic mobile robot[C]//Proceedings of the 32nd Annual Conference on IEEE Industrial Electronics. Paris, France: IEEE, 2006: 3810-3814 https://ieeexplore.ieee.org/document/4152997 [11] Mohammadi A, Mareels I, Oetomo D. Model predictive motion control of autonomous forklift vehicles with dynamics balance constraint[C]//Proceedings of the 14th International Conference on Control, Automation, Robotics and Vision. Phuket, Thailand: IEEE, 2016: 1-6 https://ieeexplore.ieee.org/abstract/document/7838833 [12] Li G F, Wang X, Yang J, et al. A new method to design fuzzy controller for unmanned autonomous forklift[C]//Proceedings of 2015 IEEE International Conference on Robotics and Biomimetics. Zhuhai, China: IEEE, 2015: 946-951 https://ieeexplore.ieee.org/document/7418893/ [13] Kanayama Y, Kimura Y, Miyazaki F, et al. A stable tracking control method for an autonomous mobile robot[C]//Proceedings of IEEE International Conference on Robotics and Automation. Cincinnati, OH, USA: IEEE, 1990: 384-389 [14] Graettinger T J, Krogh B H. Evaluation and time-scaling of trajectories for wheeled mobile robots[C]//Proceedings of American Control Conference. Atlanta, GA, USA: IEEE, 1989: 511-516 -





 点击查看大图
点击查看大图
图(12) / 表(2)
计量
- 文章访问数: 873
- HTML全文浏览量: 473
- PDF下载量: 106
- 被引次数: 0
