




PID Control of Independent Drive Electric Vehicle Stability based on Neural Network
-
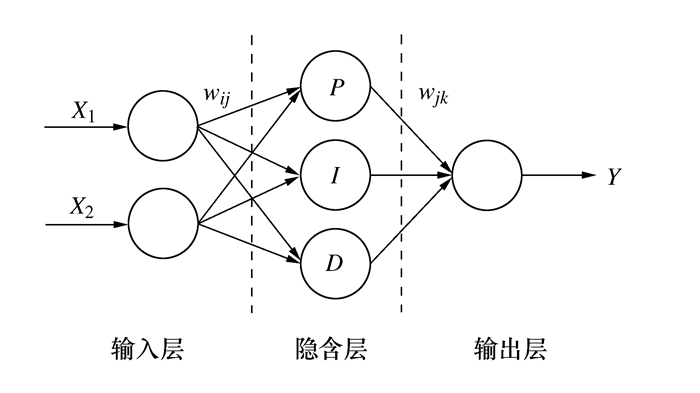
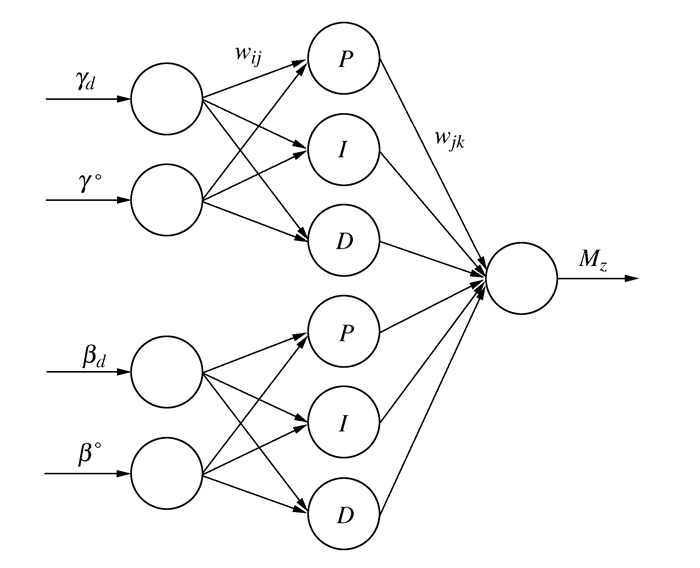
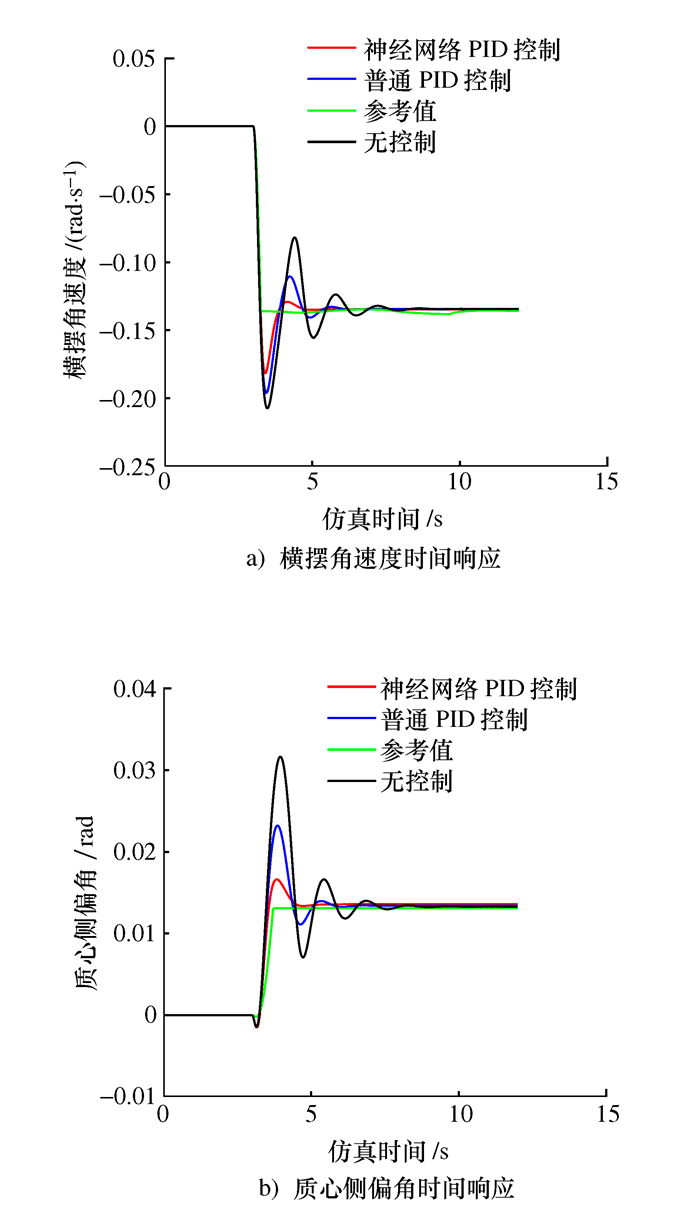
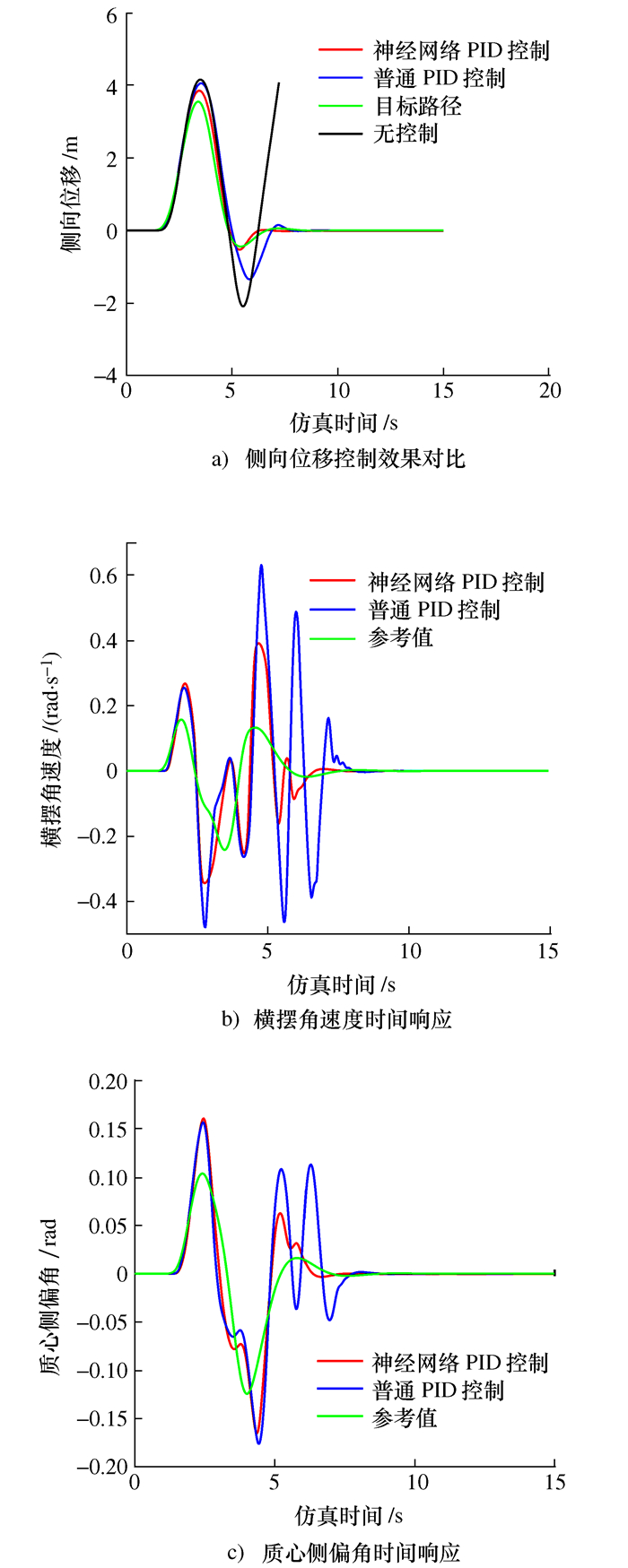
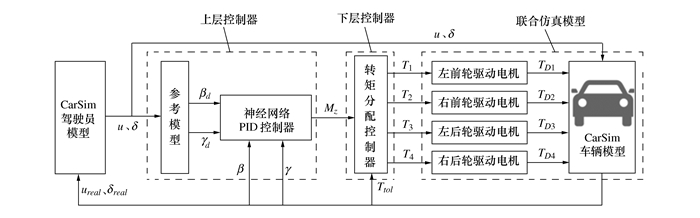
摘要: 为提高独立驱动电动汽车在极限工况下的稳定性,提出了基于神经网络PID控制策略的直接横摆力矩决策算法,控制质心侧偏角和横摆角速度并进行转矩分配。基于2自由度车辆模型的线性化特征参数与实际车辆控制目标的偏差,引入动量优化项对神经网络权值进行在线更新,计算出跟踪理想质心侧偏角和横摆角速度所需的直接横摆力矩,通过车辆前后轴动态载荷估计,考虑驱动电机饱和输出力矩和路面限制条件的约束,对各驱动轮进行直接横摆力矩分配。将算法应用于CarSim/Simulink联合仿真模型进行工况仿真实验。结果表明,该方法能够保证车辆在中速情况下于光滑路面紧急转向和紧急移线换道操作稳定性,以及在路面湿滑情况下高速超车快速并线的稳定性。Abstract: To improve the stability of an independent drive electric vehicle under the extreme conditions, a direct yaw moment decision algorithm based on the neural network PID control strategy is proposed. The algorithm controls the side-slip angle and yaw rate and carries out the torque distribution. Based on the deviation between the linearized characteristic parameters of the 2-DOF (two degrees of freedom) vehicle model and the actual vehicle control target, the moment is optimized to update the weight of the neural network, and the direct yaw moment required to track the ideal side-slip angle and yaw rate is calculated. Through the dynamic load estimation of the front and rear axles of the electric vehicle, the direct yaw moment distribution of each driving wheel is taken into account by considering the saturation torque of the driving motor and the pavement constraints. The algorithm is applied to the CarSim/Simulink joint simulation model. The simulation results show that the algorithm can guarantee the stability of the emergency steering on a smooth road, the emergency lane transfer at the medium speed and the stability of high-speed overtaking under wet and slippery conditions.
-
Key words:
- electric vehicle /
- neural network /
- control /
- stability
-
表 1 独立驱动电动汽车仿真模型主要参数
参数名称 数值及单位 车辆质量m 1 110 kg 绕z轴转动惯量
Iz1 343.1 kg·m2 质心至前轴距离a 1.04 m 质心至后轴距离b 1.56 m 前后轴距l 2.60 m 平均轮距lw 1.48 m 质心高度hc 0.54 m 车轮半径r 0.31 m 参考模型前轮侧偏刚度kf -37 242.3 N/rad 参考模型后轮侧偏刚度kr -28 647.9 N/rad  下载: 导出CSV
下载: 导出CSV
-
[1] 余卓平, 冯源, 熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报, 2013, 49(8):105-114 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201308015Yu Z P, Feng Y, Xiong L. Review on vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Mechanical Engineering, 2013, 49(8):105-114(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201308015 [2] 李亮, 贾钢, 宋健, 等.汽车动力学稳定性控制研究进展[J].机械工程学报, 2013, 49(24):95-107 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201324012Li L, Jia G, Song J, et al. Progress on vehicle dynamics stability control system[J]. Journal of Mechanical Engineering, 2013, 49(24):95-107(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201324012 [3] 刘伟.汽车ESP系统控制策略研究及硬件在环验证[D].合肥: 合肥工业大学, 2017Liu W. Research on ESP control strategy and hardware in the loop verification[D]. Hefei: Hefei University of Technology, 2017(in Chinese) [4] 桑楠, 魏民祥.车辆主动前轮转向与直接横摆力矩自适应控制[J].交通运输工程学报, 2016, 16(3):91-99 http://d.old.wanfangdata.com.cn/Periodical/jtysgcxb201603011Sang N, Wei M X. Adaptive control of active front steering and direct yaw moment for vehicle[J]. Journal of Traffic and Transportation Engineering, 2016, 16(3):91-99(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jtysgcxb201603011 [5] Jonasson M, Andreasson J, Solyom S, et al. Utilization of actuators to improve vehicle stability at the limit:from hydraulic brakes toward electric propulsion[J]. Journal of Dynamic Systems, Measurement, and Control, 2011, 133(5):051003 doi: 10.1115/1.4003800 [6] 韩伟, 熊璐, 侯一萌, 等.基于线控制动系统的车辆横摆稳定性优化控制[J].同济大学学报, 2017, 45(5):732-740 http://d.old.wanfangdata.com.cn/Periodical/tjdxxb201705015Han W, Xiong L, Hou Y M, et al. Vehicle yaw stability optimized control based on brake by wire system[J]. Journal of Tongji University, 2017, 45(5):732-740(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/tjdxxb201705015 [7] 林鼎.四轮驱动电动汽车操纵稳定性控制研究[D].杭州: 浙江大学, 2017Lin D. Research of handline and stability control for four-whed-drive electric vehicle[D]. Hangzhou: Zhejiang University, 2017(in Chinese) [8] 李刚, 王超, 石晶, 等.基于模糊控制的汽车直接横摆力矩研究[J].计算机仿真, 2014, 31(12):151-155 http://d.old.wanfangdata.com.cn/Periodical/jsjfz201412034Li G, Wang C, Shi J, et al. Direct yaw moment control based on fuzzy control[J]. Computer Simulation, 2014, 31(12):151-155(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jsjfz201412034 [9] 金辉, 李世杰.基于极限车速的车辆稳定性控制研究[J].汽车工程, 2018, 40(1):48-56 http://d.old.wanfangdata.com.cn/Periodical/qcgc201801008Jin H, Li S J. A research on vehicle stability control based on limited speed[J]. Automotive Engineering, 2018, 40(1):48-56(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/qcgc201801008 [10] 冯源, 余卓平, 熊璐.基于状态反馈的分布式驱动电动汽车操纵性改善控制方法[J].机械工程学报, 2013, 49(24):135-143 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201324016Feng Y, Yu Z P, Xiong L. Handling improvement for distributed drive electric vehicle based on state variable feedback control[J]. Journal of Mechanical Engineering, 2013, 49(24):135-143(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201324016 [11] 周婷.基于线性规划的车辆四轮独立转向控制方法[D].秦皇岛: 燕山大学, 2016Zhou T. The vehicle four-wheel-independent-steering control method based on linear programming[D]. Qinhuangdao: Yanshan University, 2016(in Chinese) [12] 林程, 彭春雷, 曹万科.独立驱动电动汽车稳定性的滑模变结构控制[J].汽车工程, 2015, 37(2):132-138 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201502002Lin C, Peng C L, Cao W K. Sliding mode variable structure control for the stability of independent drive electric vehicle[J]. Automotive Engineering, 2015, 37(2):132-138(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201502002 [13] 刘英杰, 刘云, 郭姗姗.基于模型预测控制的汽车操纵逆问题研究[J].系统仿真学报, 2018, 30(1):304-310 http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201801040Liu Y J, Liu Y, Guo S S. Study on vehicle handling inverse dynamics based on model predictive control theory[J]. Journal of System Simulation, 2018, 30(1):304-310(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201801040 [14] 陈建兵, 向青青.分布式驱动电动汽车Simulink/Carsim联合仿真平台的建立[J].机械科学与技术, 2018, 37(10):1496-1500 doi: 10.13433/j.cnki.1003-8728.20180064Chen J B, Xiang Q Q. Establishing Simulink/Carsim Co-simulation platform for distributed drive electric vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(10):1496-1500(in Chinese) doi: 10.13433/j.cnki.1003-8728.20180064 [15] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会.GB/T 6323-2014汽车操纵稳定性试验方法[S].北京: 中国标准出版社, 2014General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, National Standardization Management Committee of China. GB/T 6323-2014 Controllability and stability test procedure for automobile[S]. Beijing: China Standard Press, 2014(in Chinese) [16] Chen Y H, Karl Hedrick J, Guo K H. A novel direct yaw moment controller for in-wheel motor electric vehicles[J]. Vehicle System Dynamics, 2013, 51(6):925-942 doi: 10.1080/00423114.2013.773453 -


 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 644
- HTML全文浏览量: 236
- PDF下载量: 37
- 被引次数: 0
