




Steady Posture Adjustment of Hexapod Bionic Robot
-
摘要: 实现机器人机体姿态的平稳调整是足式机器人作为移动平台完成物资搬运等作业时的重要目标之一。本文通过分析六足机器人姿态的影响因素,研究目标姿态的可调整范围,建立了支撑腿关节与机器人机体姿态之间的动态映射关系,提出了针对六足机器人目标姿态的平稳调整方法。通过仿真验证了有效性。Abstract: It is one of the important goals to realize the steady adjustment of robot body posture when the foot robot is used as a mobile platform to carry out material handling. In this paper, by analyzing the influencing factors of hexapod robot posture, the adjustable range of target posture is studied, the dynamic mapping relationship between the support leg joint and the robot body posture is established, and a smooth adjustment method for the robot target posture is proposed. The effectiveness of the robot posture adjustment method is verified by simulation.
-
Key words:
- hexapod robot /
- body posture /
- dynamic mapping /
- posture adjustment
-
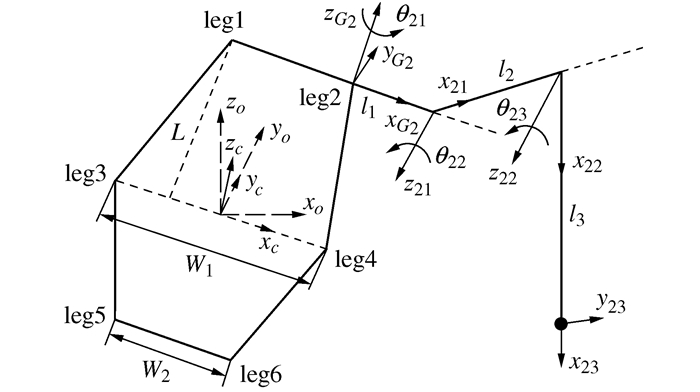
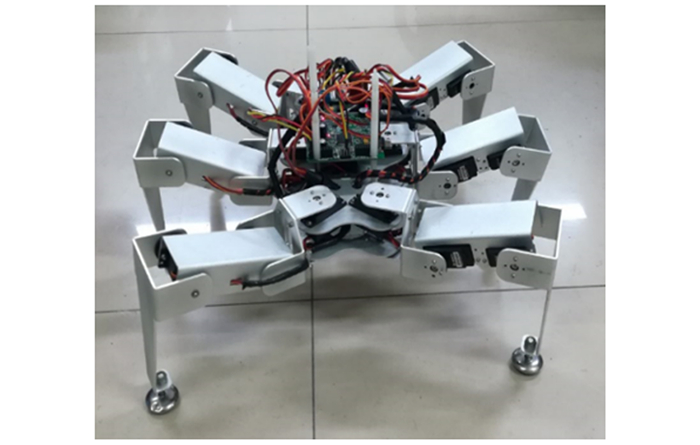
表 1 机器人机构参数表
结构参数名 符号 基节长度 l1 股节长度 l2 胫节长度 l3 机体节距 L 第i条腿 legi(i=1, 2, …, 6) 跟关节角度 θi1 髋关节角度 θi2 膝关节角度 θi3 机体宽度 W1, W2  下载: 导出CSV
下载: 导出CSV
表 2 实验参数表
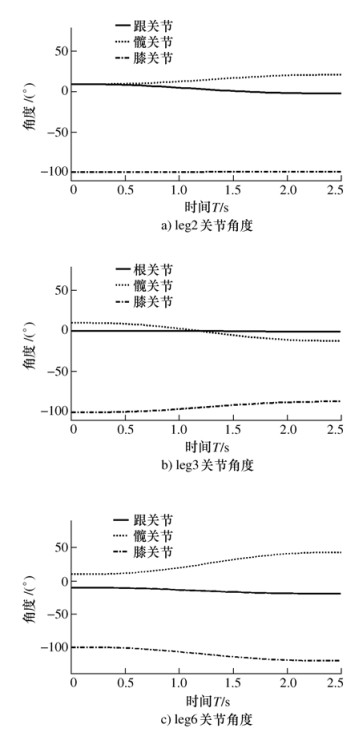
结构参数 数值 l1/cm 6 l2/cm 7 l3/cm 15 L/cm 10 W1/cm 4 θi1/(°) -30~30 θi3/(°) -150~0 初始θ2/(°) [10, 10, -100]T 初始θ3/(°) [0, 10, -100]T 初始θ6/(°) [-10, 10, -100]T 初始 
[0, 0, 0]T W2/cm 3 θi2/(°) -90~90 ve/(°·s-1) [25, 25, 18]T
下载: 导出CSV
-
[1] 王国彪, 陈殿生, 陈科位, 等.仿生机器人研究现状与发展趋势[J].机械工程学报, 2015, 51(13):27-44 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201513004Wang G B, Chen D S, Chen K W, et al. The current research status and development strategy on biomimetic robot[J]. Journal of Mechanical Engineering, 2015, 51(13):27-44(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201513004 [2] Schneider A, Paskarbeit J, Schilling M, et al. HECTOR, a bio-inspired and compliant hexapod robot[M]//Duff A, Lepora N F, Mura A, et al. Biomimetic and Biohybrid Systems. Cham: Springer, 2014: 427-429 [3] Uchida H. Six-degree-of-freedom control by posture control and walking directional control for six-legged robot[J]. Journal of Mechanical Engineering and Automation, 2017, 7(2):30-45 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=J-STAGE_2744886 [4] 陈刚, 金波, 陈鹰.基于速度逆运动学的六足步行机器人位姿闭环控制[J].农业机械学报, 2014, 45(5):265-270 http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201405041Chen G, Jin B, Chen Y. Position-posture closed-loop control of six-legged walking robot based on inverse velocity kinematics[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(5):265-270(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201405041 [5] Chen G, Jin B, Chen Y. Solving position-posture deviation problem of multi-legged walking robots with semi-round rigid feet by closed-loop control[J]. Journal of Central South University中, 2014, 21(11):4133-4141 doi: 10.1007/s11771-014-2408-3 [6] 赵龙海, 刘玉斌, 赵杰, 等.自然地形下六足步行机器人基于落足点的位姿调整策略[J].江南大学学报:自然科学版, 2013, 12(4):384-389 http://d.old.wanfangdata.com.cn/Periodical/jiangndxxb201304002Zhao L H, Liu Y B, Zhao J, et al. Pose adjustment strategy based on the selected footholds for hexapod robot walking under natural terrain[J]. Journal of Jiangnan University:Natural Science Edition, 2013, 12(4):384-389(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jiangndxxb201304002 [7] 孟健, 李贻斌, 李彬.四足机器人对角小跑步态全方位移动控制方法及其实现[J].机器人, 2015, 37(1):74-84 http://d.old.wanfangdata.com.cn/Periodical/jqr201501009Meng J, Li Y B, Li B. Control method and its implementation of quadruped robot in omni-directional trotting gait[J]. Robot, 2015, 37(1):74-84(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201501009 [8] 张国腾, 荣学文, 李贻斌, 等.基于虚拟模型的四足机器人对角小跑步态控制方法[J].机器人, 2016, 38(1):64-74 http://d.old.wanfangdata.com.cn/Periodical/jqr201601009Zhang G T, Rong X W, Li Y B, et al. Control of the quadrupedal trotting based on virtual model[J]. Robot, 2016, 38(1):64-74(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201601009 [9] 谢惠祥, 尚建忠, 罗自荣, 等.四足机器人对角小跑中机体翻转分析与姿态控制[J].机器人, 2014, 36(6):676-682 http://d.old.wanfangdata.com.cn/Periodical/jqr201406006Xie H X, Shang J Z, Luo Z R, et al. Body rolling analysis and attitude control of a quadruped robot during trotting[J]. Robot, 2014, 36(6):676-682(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201406006 [10] 韩宝玲, 贾燕, 李华师, 等.四足机器人坡面运动时的姿态调整技术[J].北京理工大学学报, 2016, 36(3):242-246 http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201603005Han B L, Jia Y, Li H S, et al. Posture adjustment for quadruped robot trotting on a slope[J]. Transactions of Beijing Institute of Technology, 2016, 36(3):242-246(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201603005 [11] 李满宏, 张明路, 张建华, 等.基于运动相对性的六足机器人机体运动规划[J].中国机械工程, 2015, 26(3):313-318 doi: 10.3969/j.issn.1004-132X.2015.03.006Li M H, Zhang M L, Zhang J H, et al. Body motion planning for a hexapod robot based on relative motion[J]. China Mechanical Engineering, 2015, 26(3):313-318(in Chinese) doi: 10.3969/j.issn.1004-132X.2015.03.006 [12] 李满宏, 张小俊, 张建华, 等.面向给定轨迹的六足机器人多足协调控制[J].华中科技大学学报:自然科学版, 2015, 43(4):32-37 http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201504007Li M H, Zhang X J, Zhang J H, et al. Given trajectory oriented multi-legged coordinated control of hexapod robot[J]. Journal of Huazhong University of Science & Technology:Natural Science Edition, 2015, 43(4):32-37(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201504007 [13] 李满宏, 张建华, 张明路.新型仿生六足机器人自由步态中足端轨迹规划[J].中国机械工程, 2014, 25(6):821-825 doi: 10.3969/j.issn.1004-132X.2014.06.023Li M H, Zhang J H, Zhang M L. Foot trajectory planning for a hexapod biomimetic robot using free gait[J]. China Mechanical Engineering, 2014, 25(6):821-825(in Chinese) doi: 10.3969/j.issn.1004-132X.2014.06.023 [14] Zhang L, Ma S G, Inoue K, et al. Omni-directional walking of a quadruped robot with optimal body postures on a slope[C]//Proceedings of 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005: 2976-2981. [15] Zhang L, Li D D, Yang F, et al. Development and attitude control of a Hexapod bionic-Robot[C]//2016 IEEE International Conference on Robotics and Biomimetics. Shandong Qingdao: IEEE, 2016: 77-82 -



 点击查看大图
点击查看大图
图(8) / 表(2)
计量
- 文章访问数: 1283
- HTML全文浏览量: 565
- PDF下载量: 98
- 被引次数: 0
