作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2021年 40卷 第6期
2021, 40(6): 821-827.
doi: 10.13433/j.cnki.1003-8728.20200336
 摘要
摘要 HTML
HTML PDF 4389KB
PDF 4389KB
摘要:
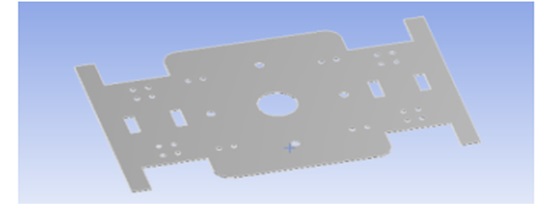
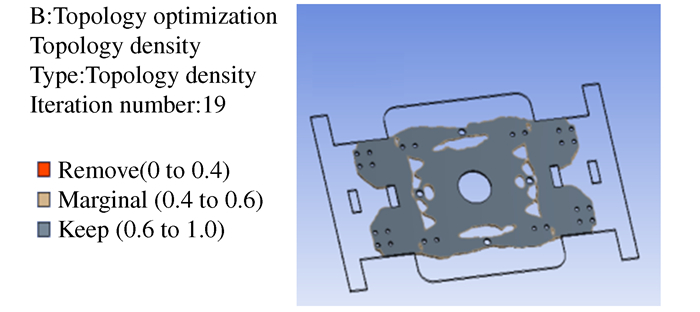
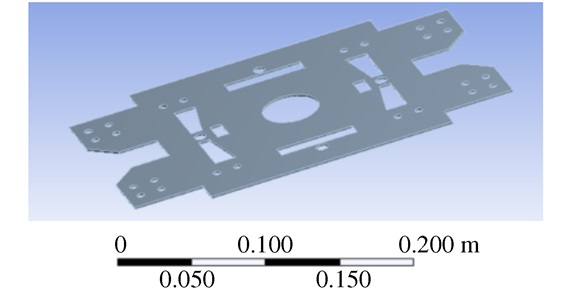
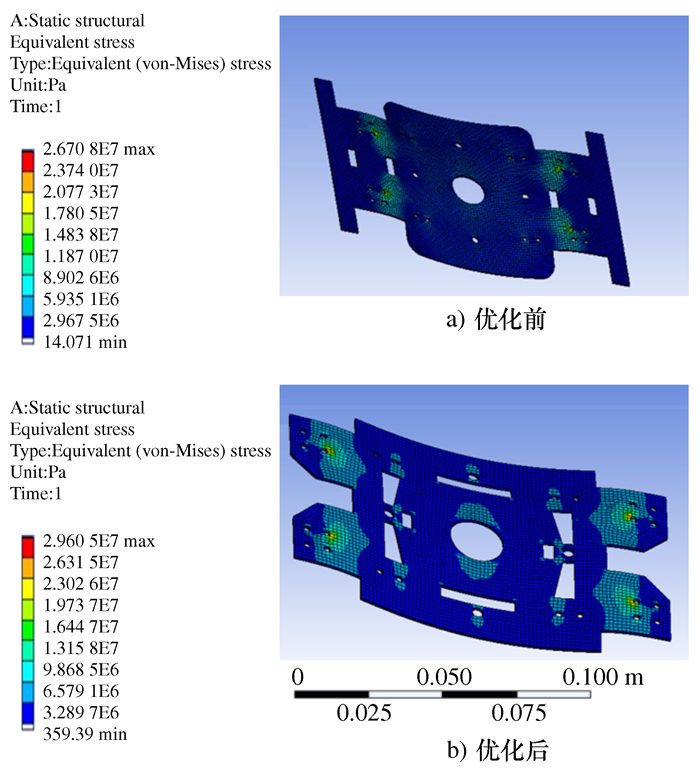
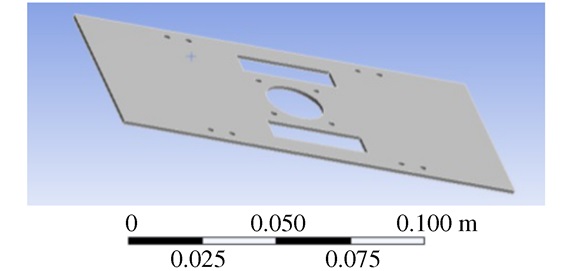
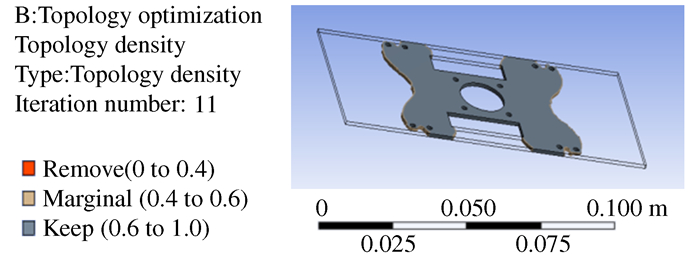
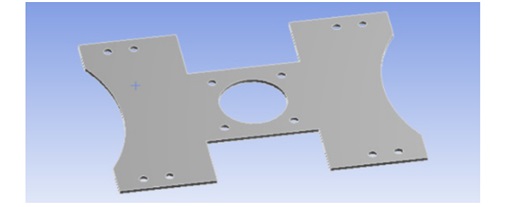
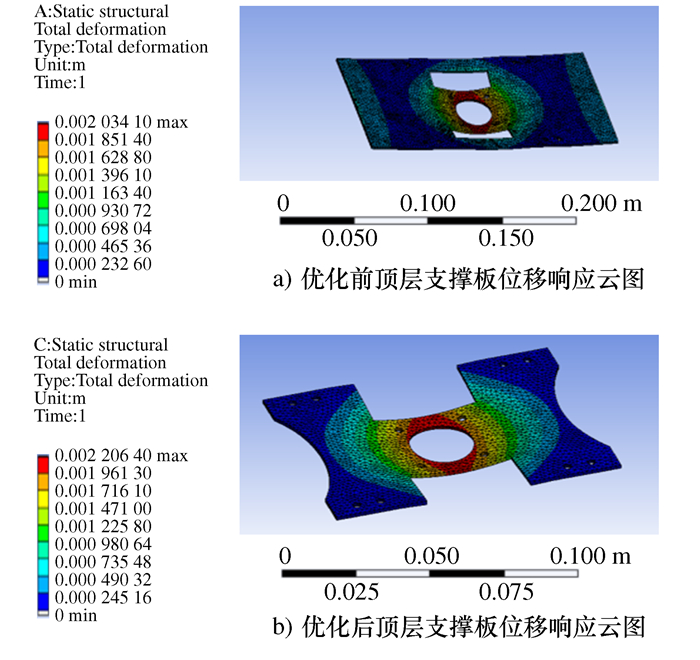
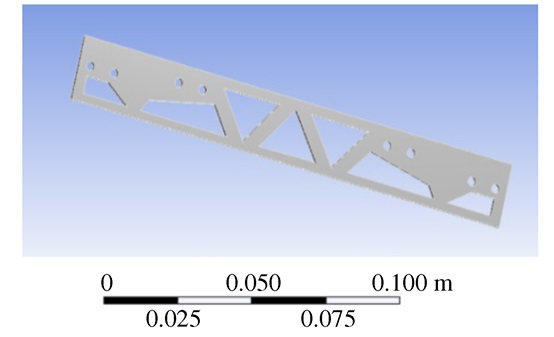
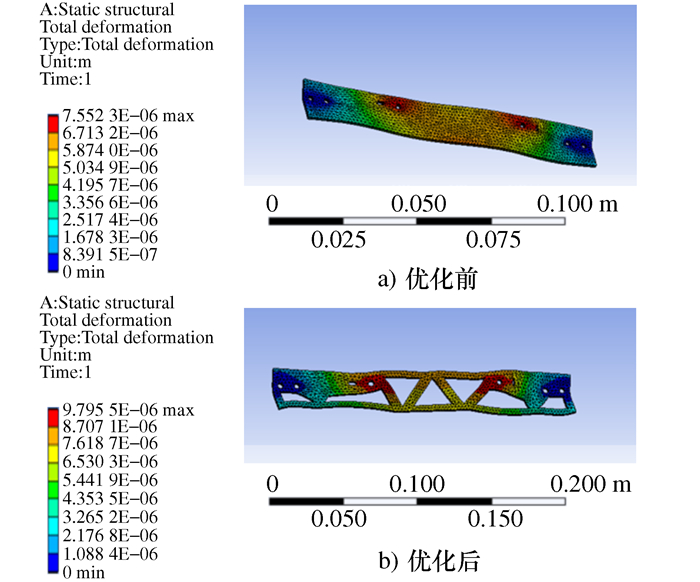
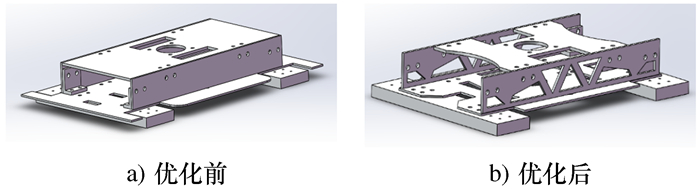
针对目前爬壁机器人自身重量过重、机身结构过于复杂的问题, 提出一种爬壁机器人吸附结构变密度拓扑优化法。通过对爬壁机器人吸附于壁面时影响较大的主要结构部件进行三维建模, 引入变密度拓扑优化法对所选用的部件在Ansys Workbench软件中进行结构优化。根据机器人工作实际情况设置边界条件和载荷, 合理去除爬壁机器人主体部件中对结构强度影响不大的区域。根据优化结果重建模型并和原始结构模型进行应力分析对比, 从而实现对爬壁机器人主体结构的拓扑优化。将优化后的吸附面结构与优化前的吸附面结构在ANSYS中对比, 在保证爬壁机器人底板强度一致的基础上达到轻量化的目的, 有助于提高爬壁机器人的灵活性和运动控制能力。
针对目前爬壁机器人自身重量过重、机身结构过于复杂的问题, 提出一种爬壁机器人吸附结构变密度拓扑优化法。通过对爬壁机器人吸附于壁面时影响较大的主要结构部件进行三维建模, 引入变密度拓扑优化法对所选用的部件在Ansys Workbench软件中进行结构优化。根据机器人工作实际情况设置边界条件和载荷, 合理去除爬壁机器人主体部件中对结构强度影响不大的区域。根据优化结果重建模型并和原始结构模型进行应力分析对比, 从而实现对爬壁机器人主体结构的拓扑优化。将优化后的吸附面结构与优化前的吸附面结构在ANSYS中对比, 在保证爬壁机器人底板强度一致的基础上达到轻量化的目的, 有助于提高爬壁机器人的灵活性和运动控制能力。






2021, 40(6): 828-834.
doi: 10.13433/j.cnki.1003-8728.20200121
摘要:
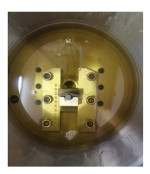
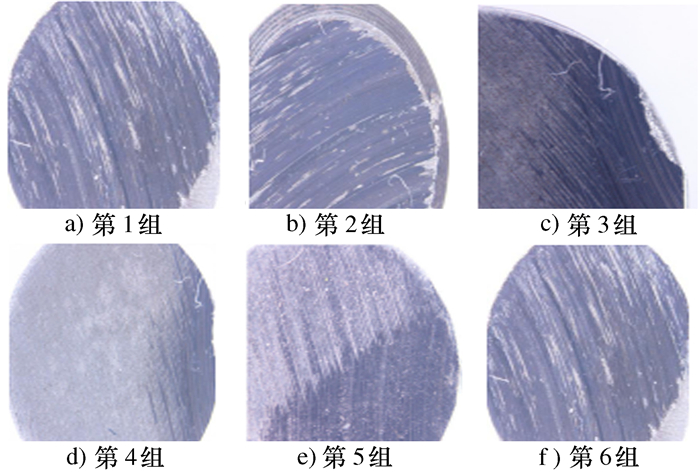
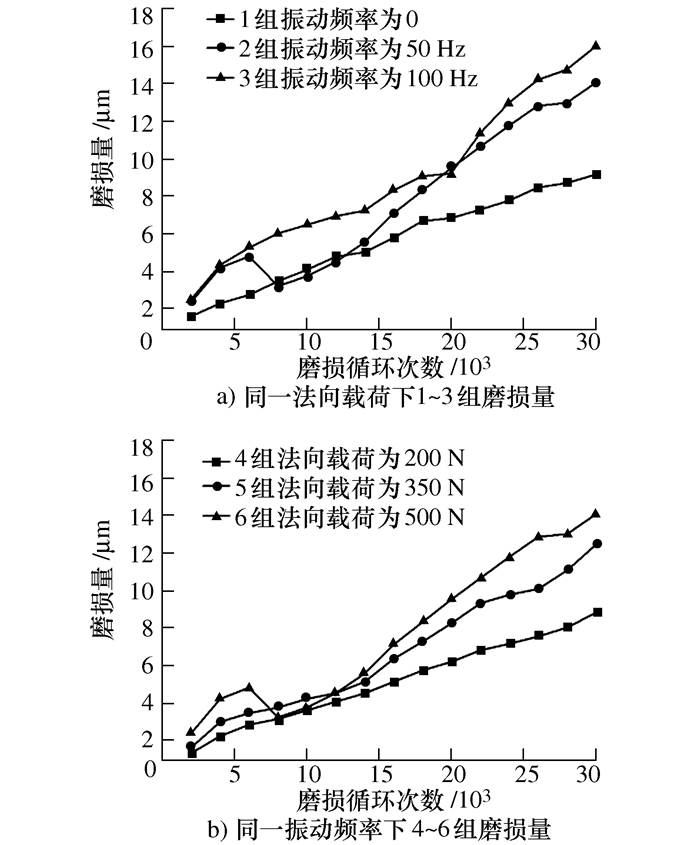
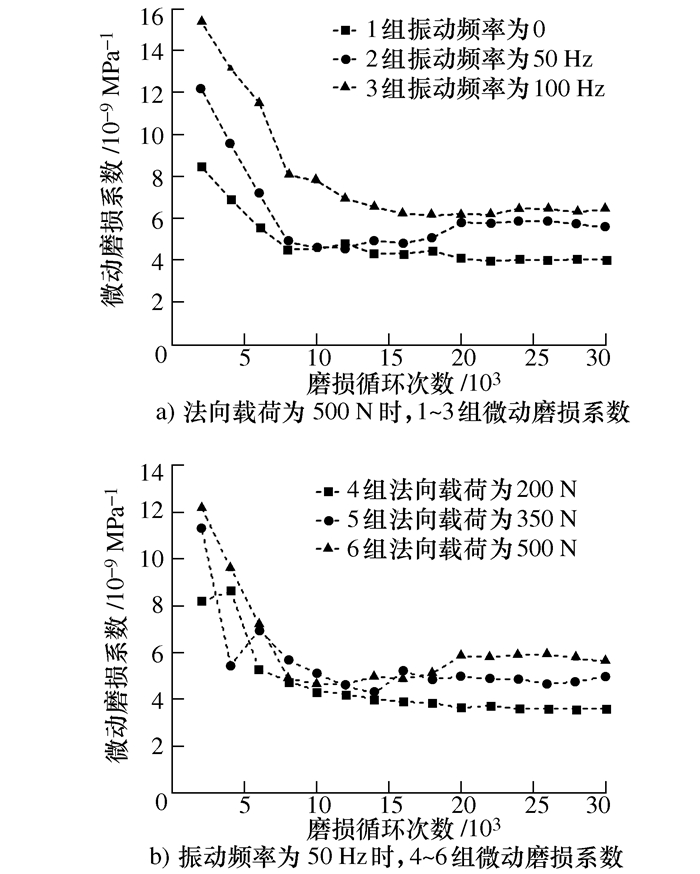
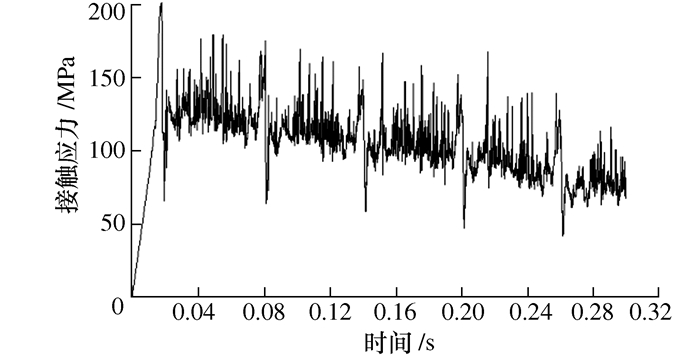
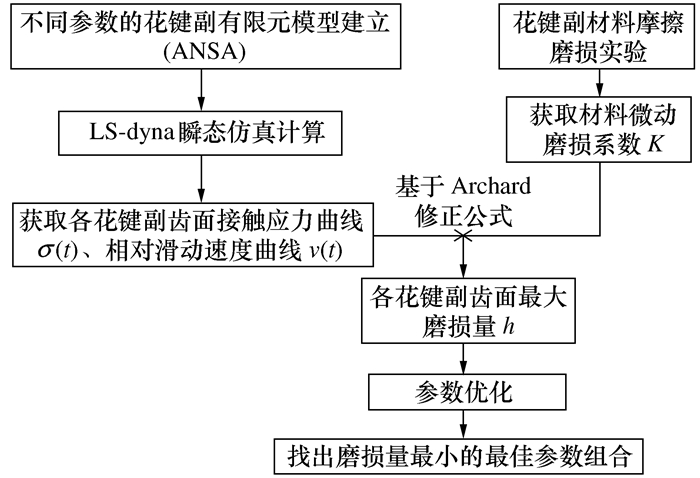
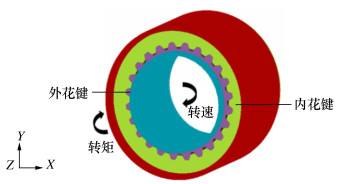
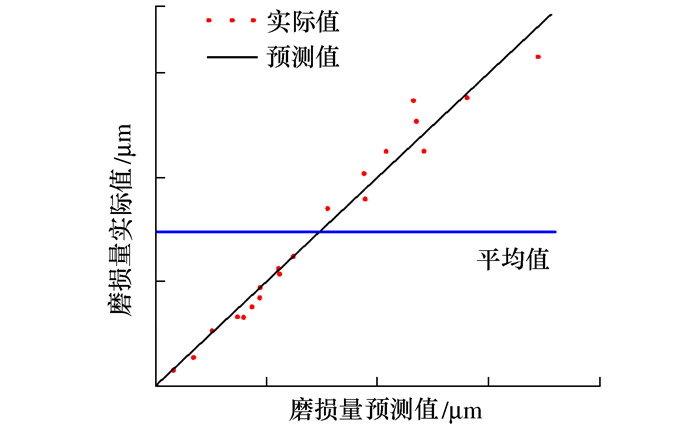
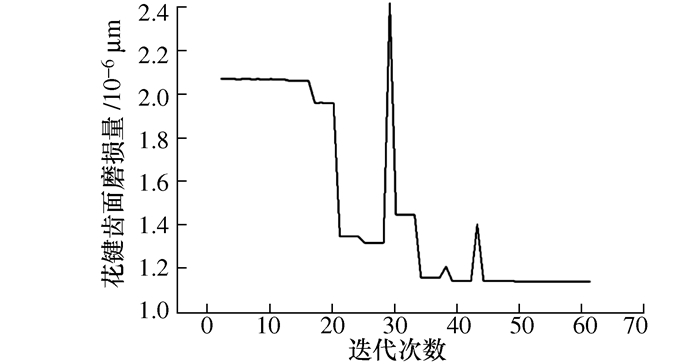
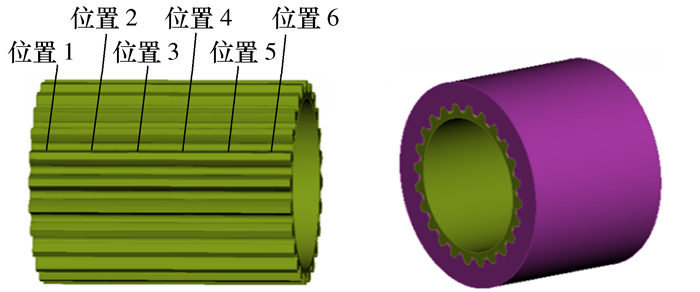
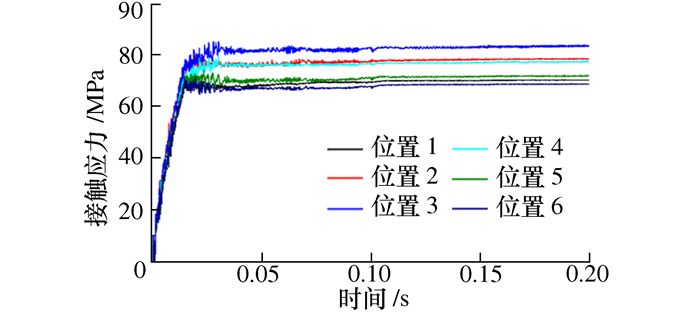
为探究渐开线花键副在微动工况下的磨损行为, 对花键副材料20CrMoH进行磨损实验, 得到不同工况下花键副材料20CrMoH的磨损系数。实验结果表明: 在同一振动频率下, 材料微动磨损系数随着法向正压力的增大而增大; 在同一法向正压力下, 材料的微动磨损系数随着振动频率的增大而增大。采用有限元与Archard理论相结合的方式对花键副材料磨损量进行预测, 并与磨损实验结果进行对比, 验证了该预测方法的可行性。为寻找改善花键副齿面磨损的方法与思路, 进行花键副参数优化, 以花键副齿面磨损量最小为目标寻求侧隙、修形量、夹角这3个参数的最佳组合, 得到该花键副采用侧隙为0.09 mm、鼓形修形量22.66 μm、夹角为0.04°进行加工设计安装时磨损量最小。
为探究渐开线花键副在微动工况下的磨损行为, 对花键副材料20CrMoH进行磨损实验, 得到不同工况下花键副材料20CrMoH的磨损系数。实验结果表明: 在同一振动频率下, 材料微动磨损系数随着法向正压力的增大而增大; 在同一法向正压力下, 材料的微动磨损系数随着振动频率的增大而增大。采用有限元与Archard理论相结合的方式对花键副材料磨损量进行预测, 并与磨损实验结果进行对比, 验证了该预测方法的可行性。为寻找改善花键副齿面磨损的方法与思路, 进行花键副参数优化, 以花键副齿面磨损量最小为目标寻求侧隙、修形量、夹角这3个参数的最佳组合, 得到该花键副采用侧隙为0.09 mm、鼓形修形量22.66 μm、夹角为0.04°进行加工设计安装时磨损量最小。





2021, 40(6): 835-839.
doi: 10.13433/j.cnki.1003-8728.20200161
摘要:
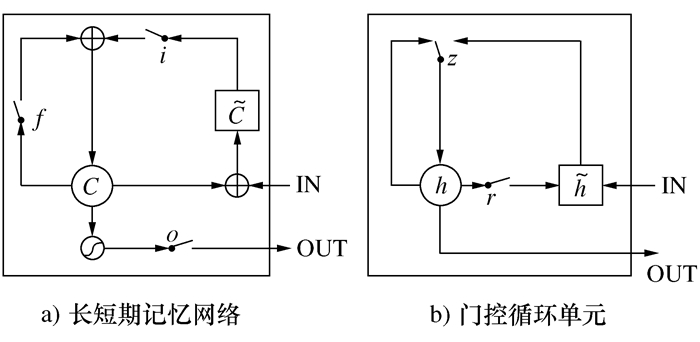
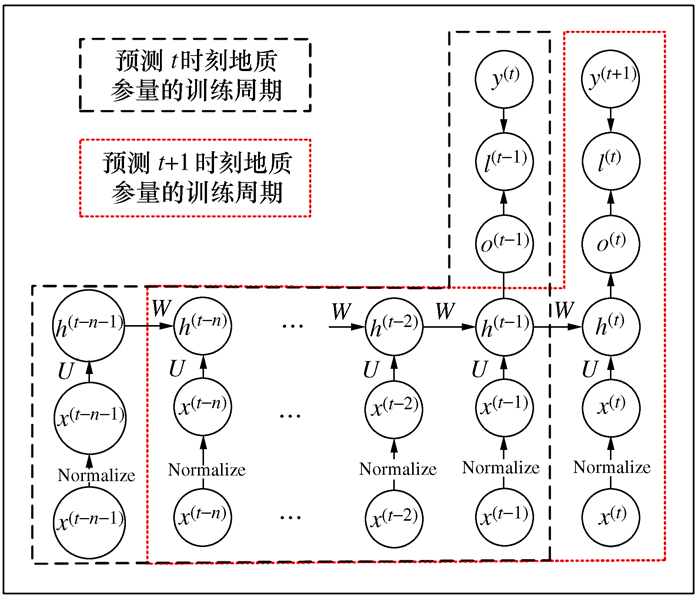
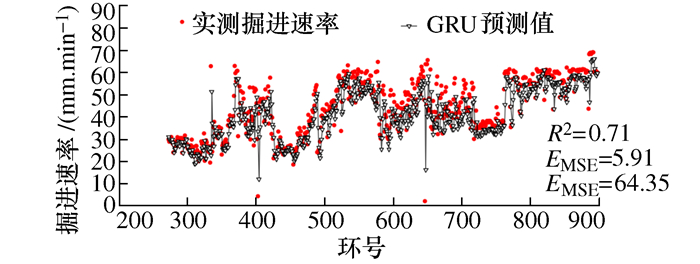
本文基于工程实测数据, 在分析其序列性质的基础上, 提出了基于时序神经网络方法的盾构掘进速率预测方法, 并在天津地铁9号线这一实际工程算例中对所提出的方法的有效性进行验证, 讨论比较了Simple RNN、LSTM与GRU这3种不同时序神经网络算法的掘进速率预测表现。结果表明, 本文提出的基于时序神经网络的盾构掘进速率预测方法能够较好地分析掘进中积累的工程实测数据中的序列性质, 从而对前方掘进速率进行预测, 且比具有"门"性质的LSTM与GRU方法表现出了更好的预测效果。
本文基于工程实测数据, 在分析其序列性质的基础上, 提出了基于时序神经网络方法的盾构掘进速率预测方法, 并在天津地铁9号线这一实际工程算例中对所提出的方法的有效性进行验证, 讨论比较了Simple RNN、LSTM与GRU这3种不同时序神经网络算法的掘进速率预测表现。结果表明, 本文提出的基于时序神经网络的盾构掘进速率预测方法能够较好地分析掘进中积累的工程实测数据中的序列性质, 从而对前方掘进速率进行预测, 且比具有"门"性质的LSTM与GRU方法表现出了更好的预测效果。




2021, 40(6): 840-845.
doi: 10.13433/j.cnki.1003-8728.20200122
摘要:
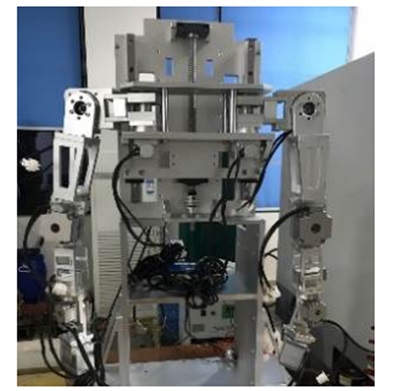
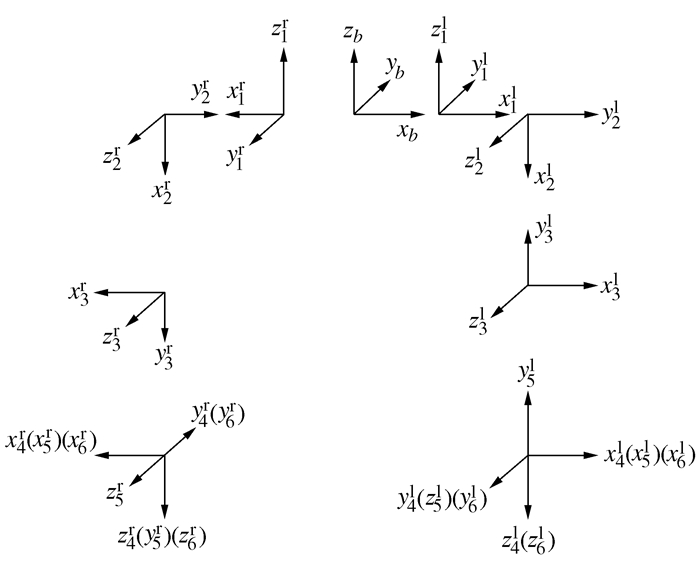
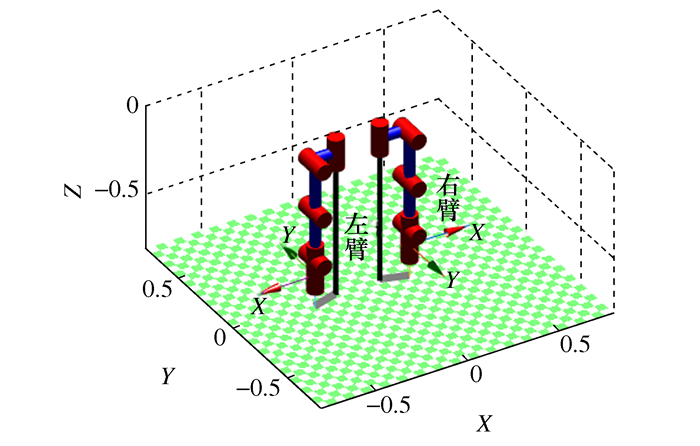
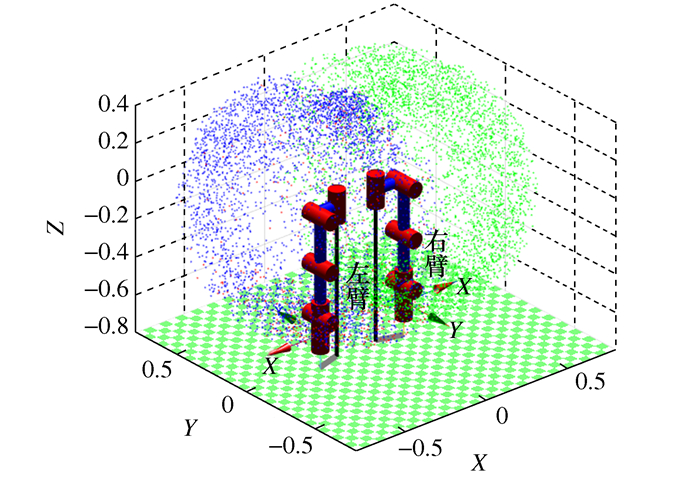
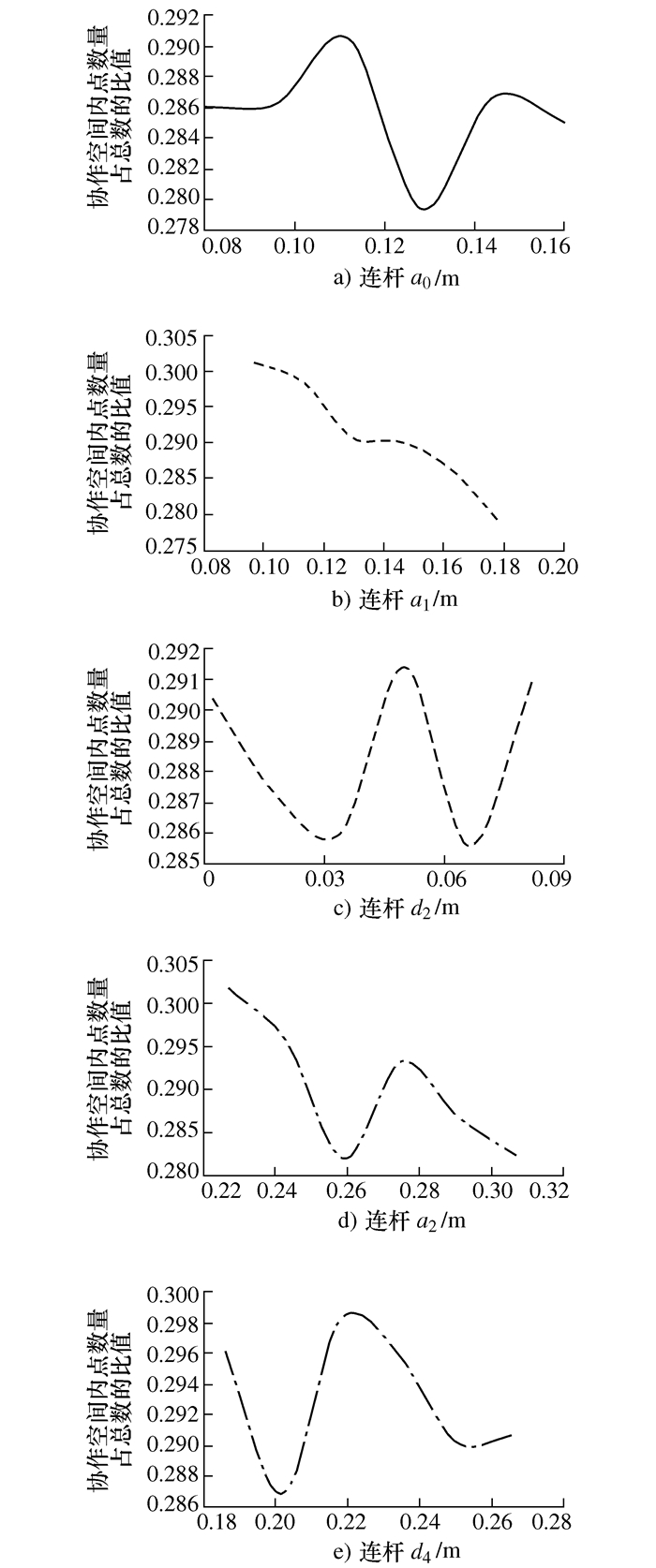
针对双臂机器人协作空间及其机构参数优化问题, 以6R双臂服务机器人为研究对象, 根据D-H参数求出运动学正解, 利用蒙特卡洛法求解双臂各自的工作空间, 以协作空间最大为优化目标, 求解机械臂机构最优参数, 通过MATLAB进行编程对具体运算结果进行验证。结果表明, 在一定约束之内, 以双臂机器人协作空间最大为目标, 优化机构连杆长度和关节范围大小, 对双臂服务机器人的设计改进有着重要意义, 为后续的双臂协调操作奠定了基础。
针对双臂机器人协作空间及其机构参数优化问题, 以6R双臂服务机器人为研究对象, 根据D-H参数求出运动学正解, 利用蒙特卡洛法求解双臂各自的工作空间, 以协作空间最大为优化目标, 求解机械臂机构最优参数, 通过MATLAB进行编程对具体运算结果进行验证。结果表明, 在一定约束之内, 以双臂机器人协作空间最大为目标, 优化机构连杆长度和关节范围大小, 对双臂服务机器人的设计改进有着重要意义, 为后续的双臂协调操作奠定了基础。

2021, 40(6): 846-852.
doi: 10.13433/j.cnki.1003-8728.20200130
摘要:
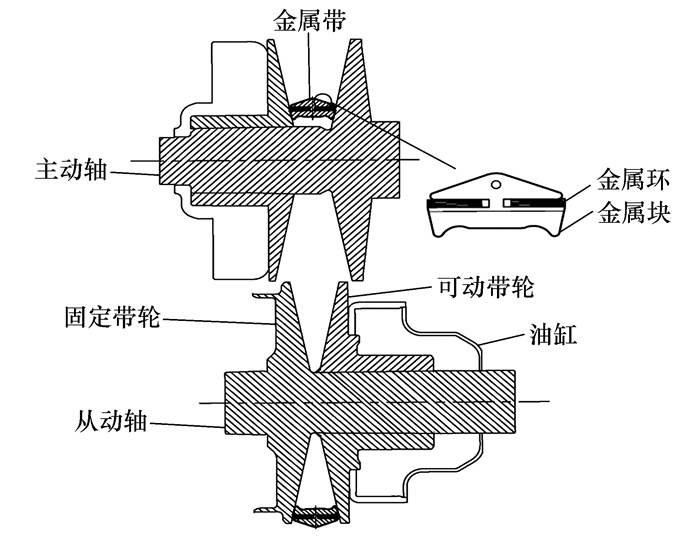
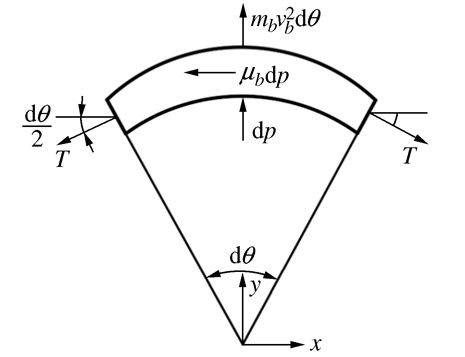
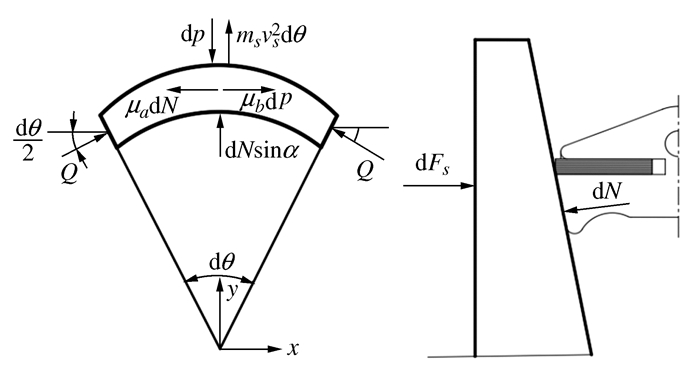
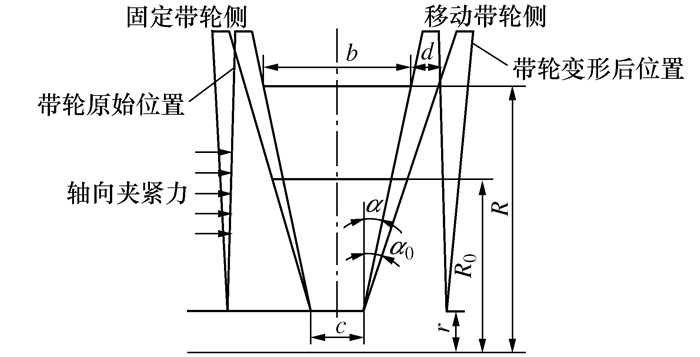
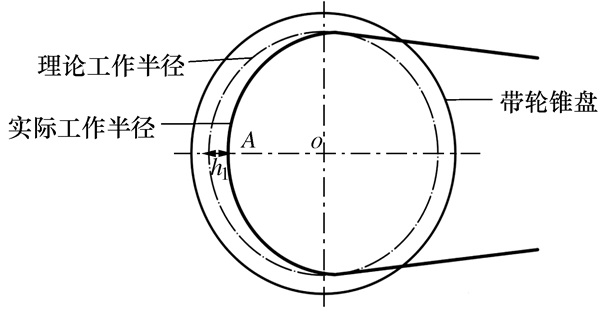
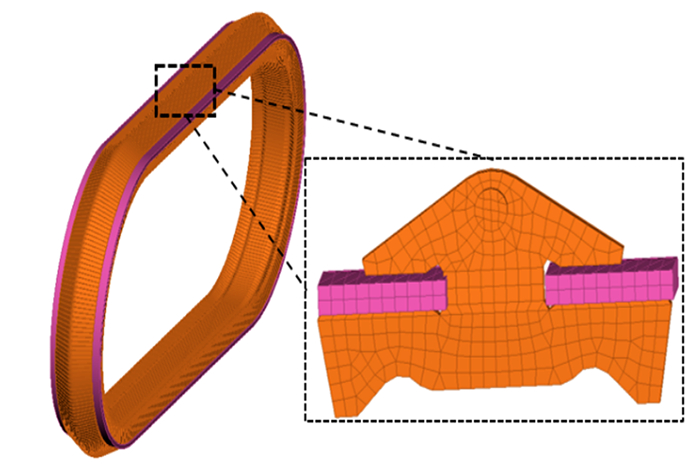
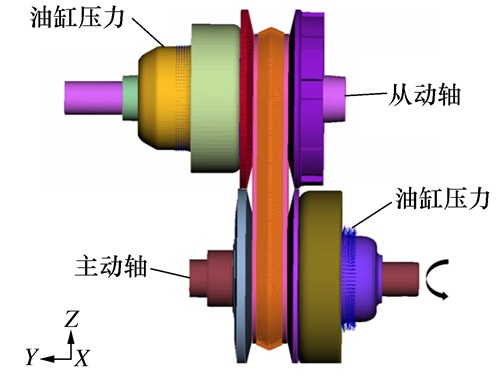
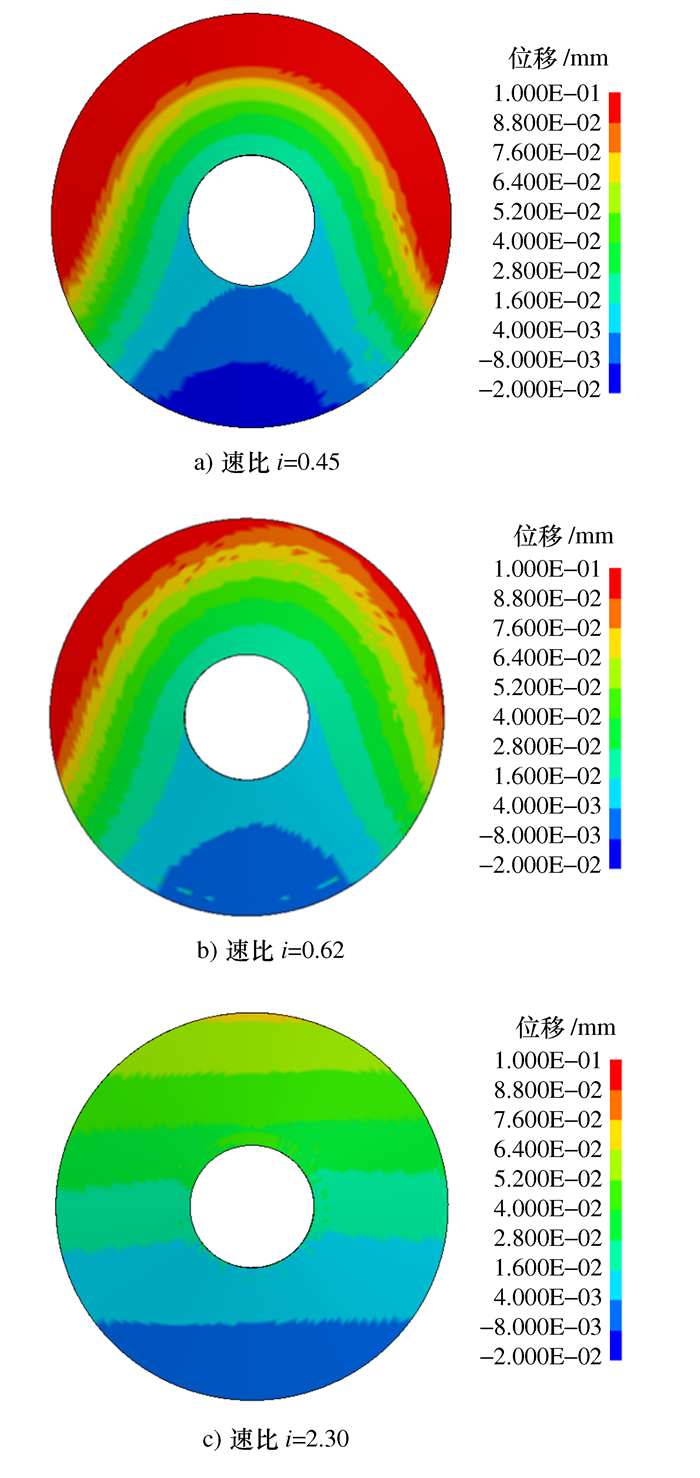
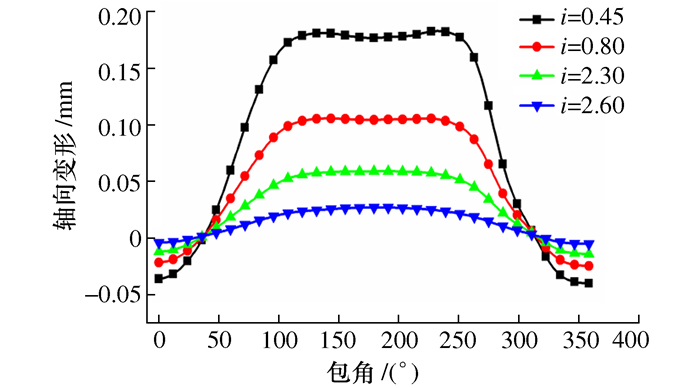
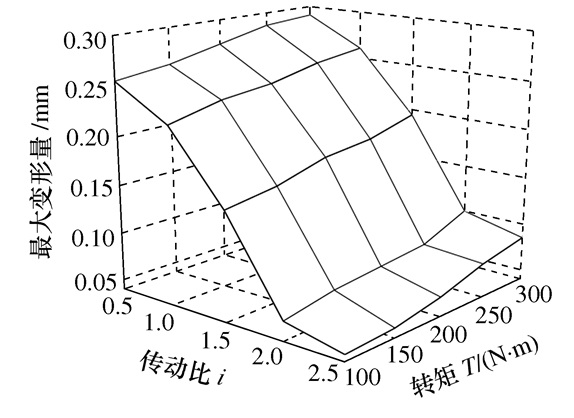
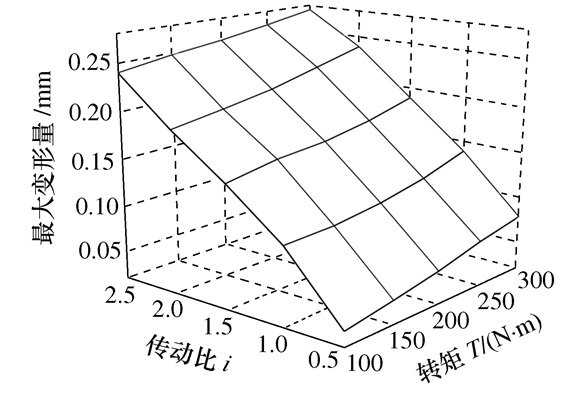
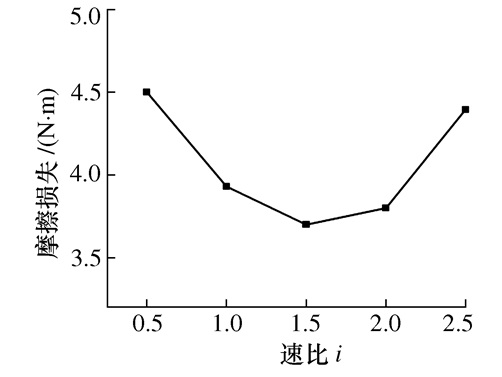
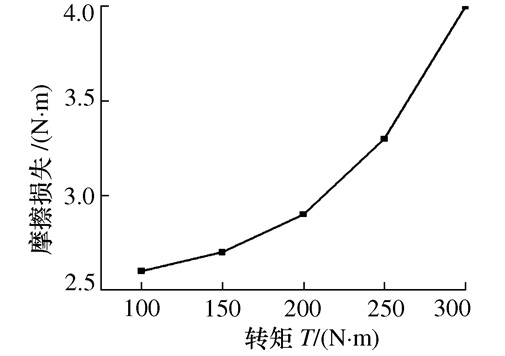
金属带式无级变速器(CVT)的带轮变形会导致金属带沿着带轮锥面发生径向偏移, 从而使得系统产生摩擦损失, 严重影响变速机构的传动效率。以某国产CVT为研究对象, 建立了带轮变形摩擦损失模型并利用ANSYS软件对金属带式无级变速器传动部分进行有限元仿真分析。分析结果表明: 速比是影响带轮变形的主要因素, 带轮锥面最大变形量随着工作半径减小而逐渐减小。同时, 从摩擦损失模型可以看出发生在带轮工作半径上的最大变形量是影响摩擦损失的主要因素, 带轮摩擦损失在传动比较大或较小时达到最大值, 并且随着输入转矩的增加摩擦损失也随之而增加。
金属带式无级变速器(CVT)的带轮变形会导致金属带沿着带轮锥面发生径向偏移, 从而使得系统产生摩擦损失, 严重影响变速机构的传动效率。以某国产CVT为研究对象, 建立了带轮变形摩擦损失模型并利用ANSYS软件对金属带式无级变速器传动部分进行有限元仿真分析。分析结果表明: 速比是影响带轮变形的主要因素, 带轮锥面最大变形量随着工作半径减小而逐渐减小。同时, 从摩擦损失模型可以看出发生在带轮工作半径上的最大变形量是影响摩擦损失的主要因素, 带轮摩擦损失在传动比较大或较小时达到最大值, 并且随着输入转矩的增加摩擦损失也随之而增加。



2021, 40(6): 853-862.
doi: 10.13433/j.cnki.1003-8728.20200132
摘要:
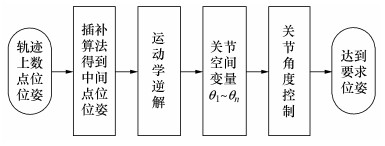
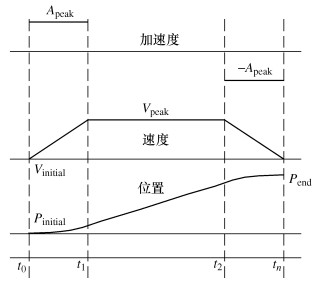
凭借良好的环境适应性、高效率、高生产质量以及7×24工作模式, 工业机器人广泛地应用于喷涂、焊接、码垛、搬运等自动化生产中。轨迹规划是工业机器人完成作业任务运动控制的基础, 直接决定了机器人工作质量。为了全面了解轨迹规划现有研究方法, 首先阐述了轨迹规划的基本流程, 根据轨迹规划的原理不同对现有轨迹规划方法进行了分类, 并分别对各种插补曲线函数、最优轨迹规划以及求解算法的性能特点进行了详细的分析与总结。最后对轨迹规划在插补曲线构造和求解算法方面的现存问题做出了分析和讨论, 并展望了轨迹规划的发展趋势。
凭借良好的环境适应性、高效率、高生产质量以及7×24工作模式, 工业机器人广泛地应用于喷涂、焊接、码垛、搬运等自动化生产中。轨迹规划是工业机器人完成作业任务运动控制的基础, 直接决定了机器人工作质量。为了全面了解轨迹规划现有研究方法, 首先阐述了轨迹规划的基本流程, 根据轨迹规划的原理不同对现有轨迹规划方法进行了分类, 并分别对各种插补曲线函数、最优轨迹规划以及求解算法的性能特点进行了详细的分析与总结。最后对轨迹规划在插补曲线构造和求解算法方面的现存问题做出了分析和讨论, 并展望了轨迹规划的发展趋势。
2021, 40(6): 863-869.
doi: 10.13433/j.cnki.1003-8728.20200138
摘要:
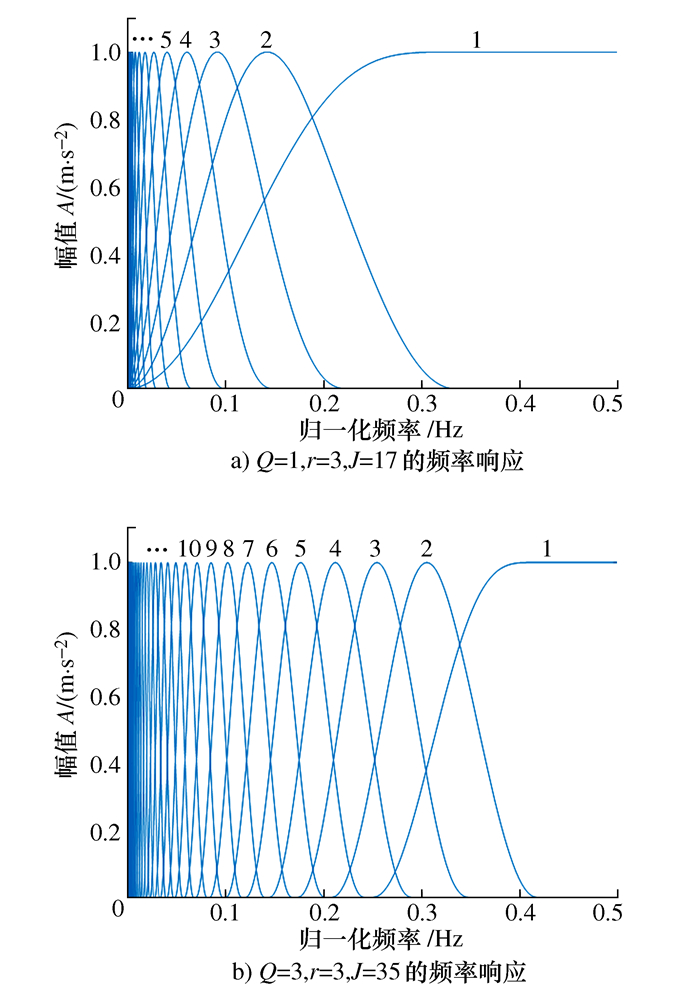
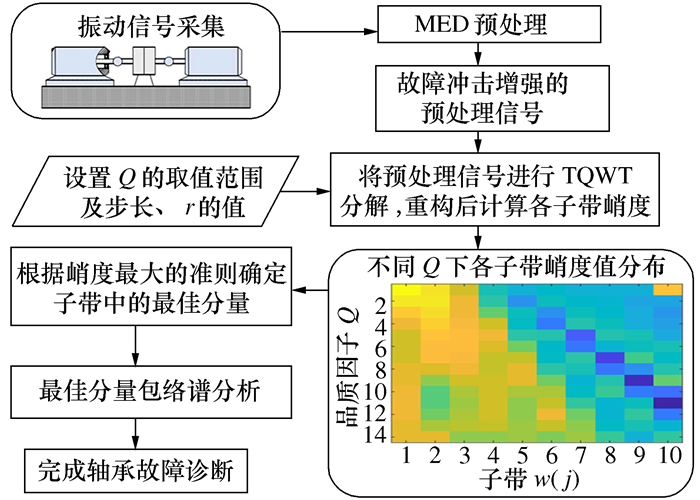
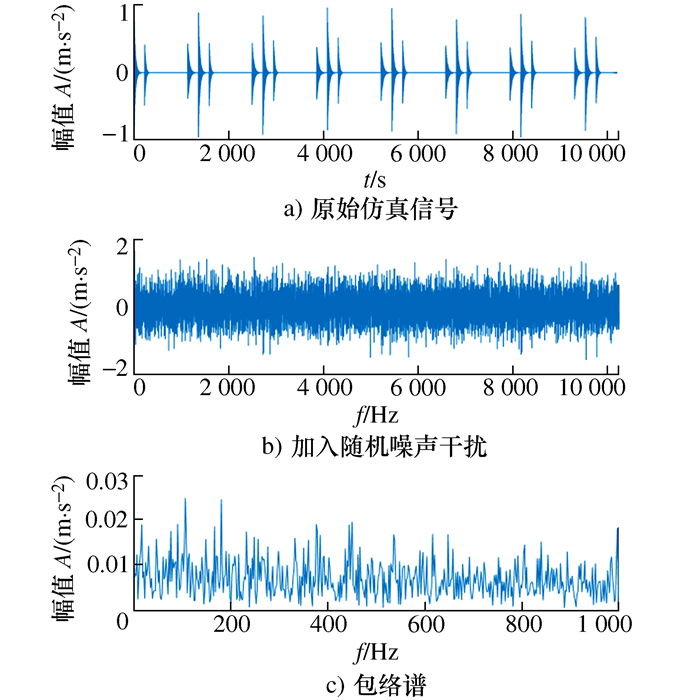
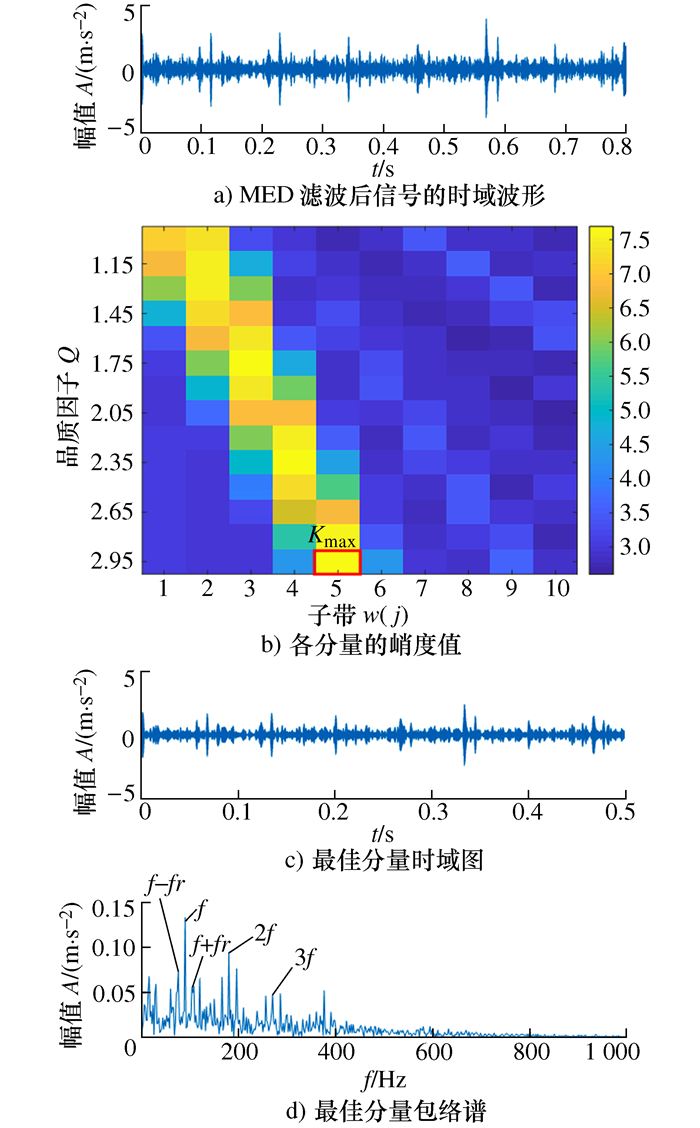
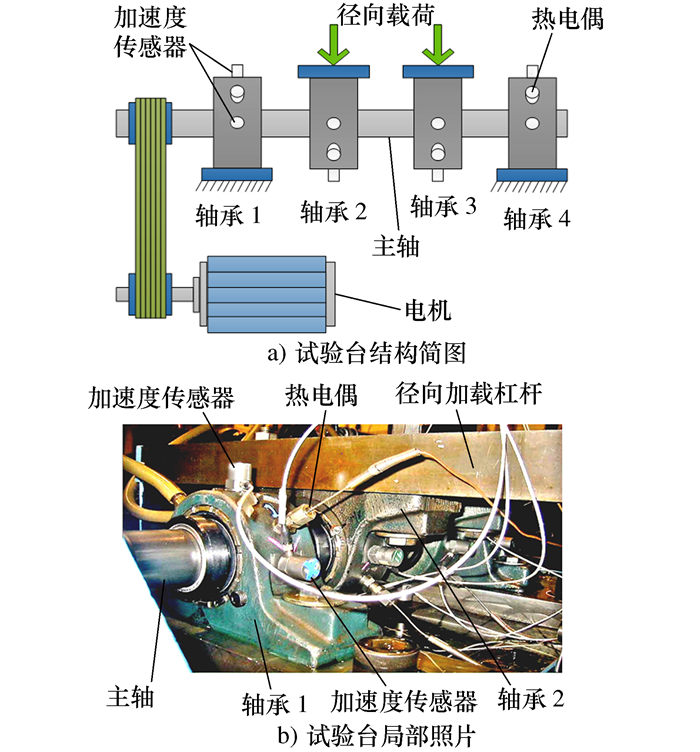
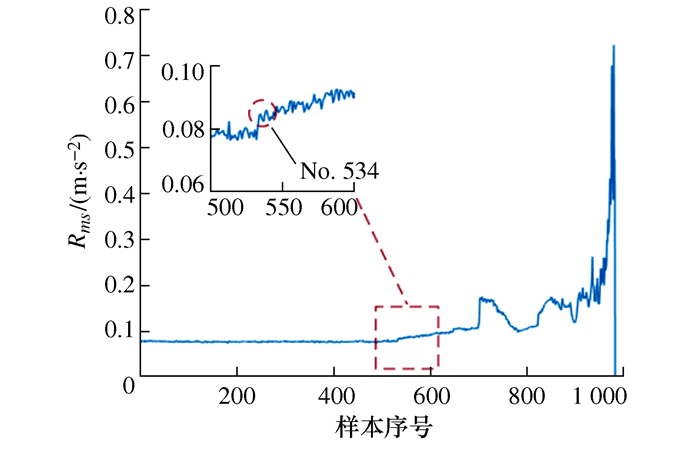
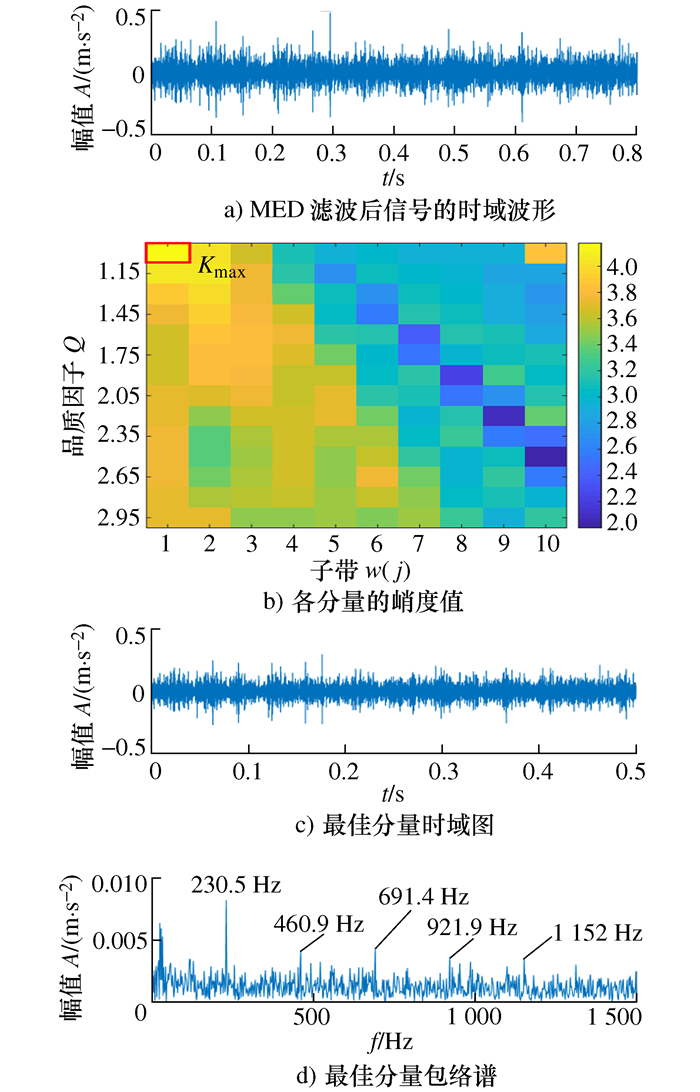
针对滚动轴承早期故障冲击特征微弱且故障信息难以识别的问题, 提出了一种最小熵解卷积(MED)与可调品质因子小波变换(TQWT)相结合的滚动轴承早期故障冲击特征提取方法。由于(MED)能够突出信号中的冲击特征成分, 首先对振动信号进行MED预处理, 使受到传输路径影响的微弱冲击成分得到一定程度的增强。再利用TQWT对预处理后的信号进行分解重构, 得到若干个子带信号。对比不同品质因子Q下的各子带信号峭度值, 根据峭度最大原则确定子带中的最佳分量并对其进行包络谱分析, 从而根据轴承故障特征频率确定轴承健康状态。仿真信号验证了所提方法的有效性, 实验信号表明了该方法在轴承早期故障诊断中具有一定的优势。
针对滚动轴承早期故障冲击特征微弱且故障信息难以识别的问题, 提出了一种最小熵解卷积(MED)与可调品质因子小波变换(TQWT)相结合的滚动轴承早期故障冲击特征提取方法。由于(MED)能够突出信号中的冲击特征成分, 首先对振动信号进行MED预处理, 使受到传输路径影响的微弱冲击成分得到一定程度的增强。再利用TQWT对预处理后的信号进行分解重构, 得到若干个子带信号。对比不同品质因子Q下的各子带信号峭度值, 根据峭度最大原则确定子带中的最佳分量并对其进行包络谱分析, 从而根据轴承故障特征频率确定轴承健康状态。仿真信号验证了所提方法的有效性, 实验信号表明了该方法在轴承早期故障诊断中具有一定的优势。




2021, 40(6): 870-879.
doi: 10.13433/j.cnki.1003-8728.20200162
摘要:
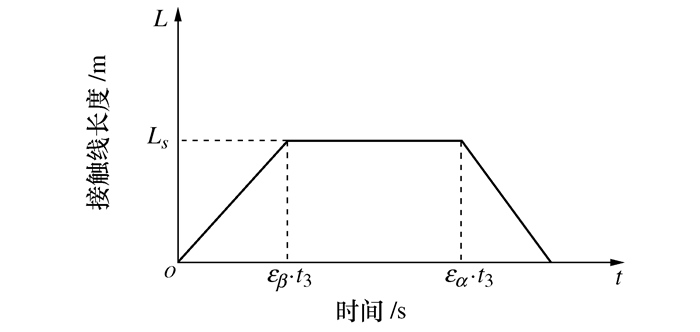
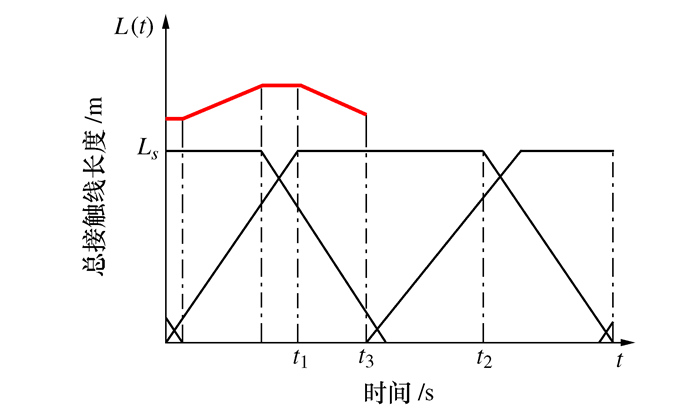
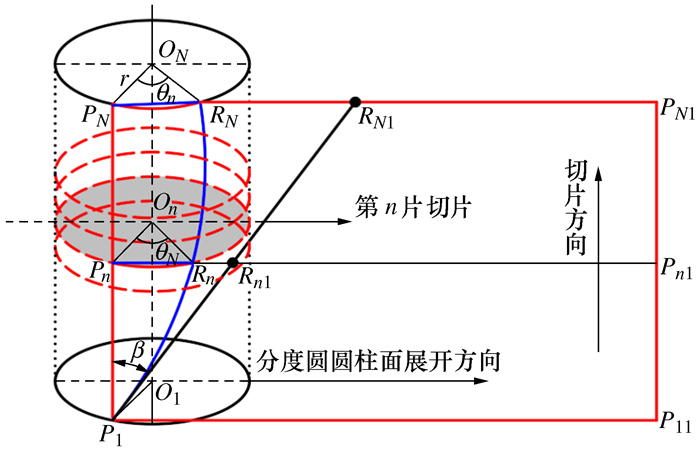
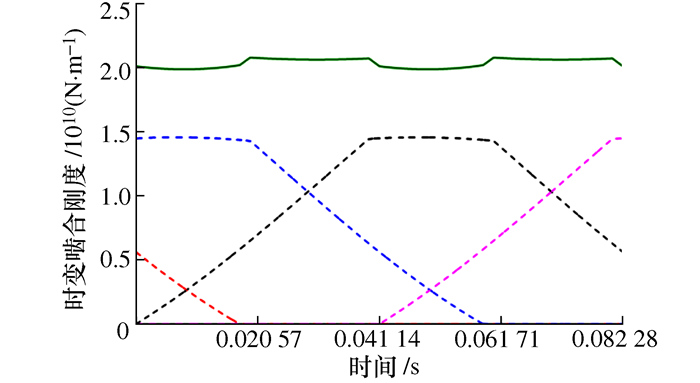
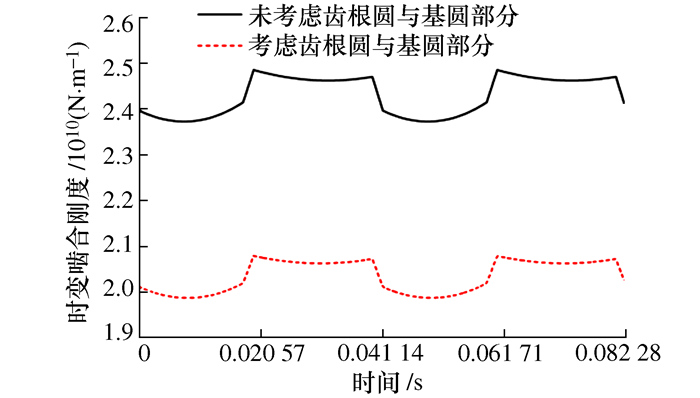
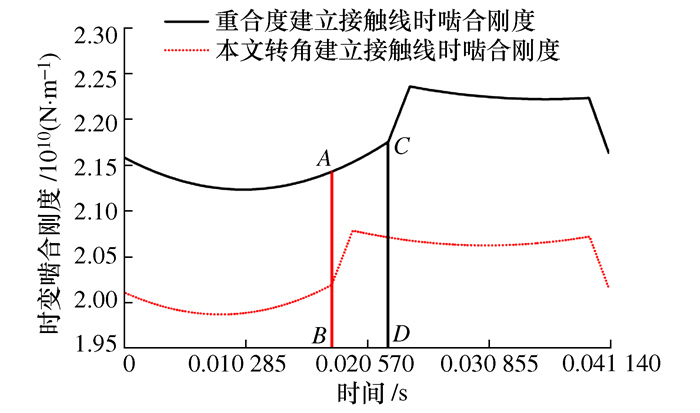
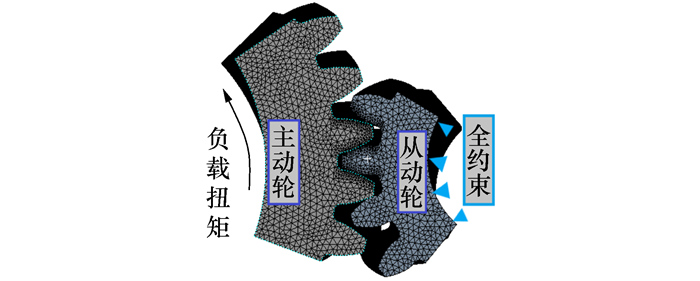
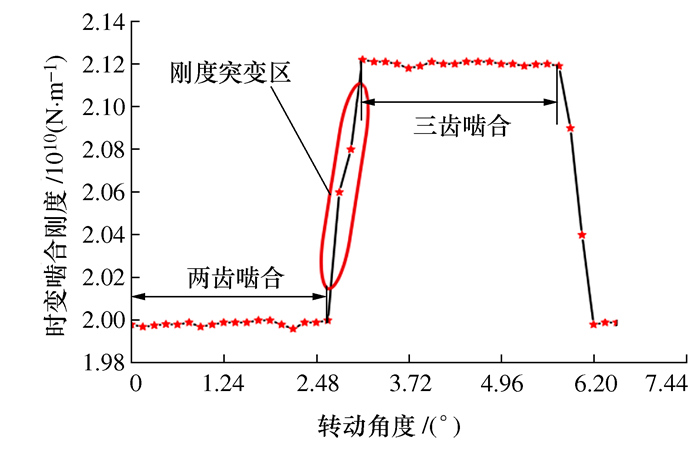
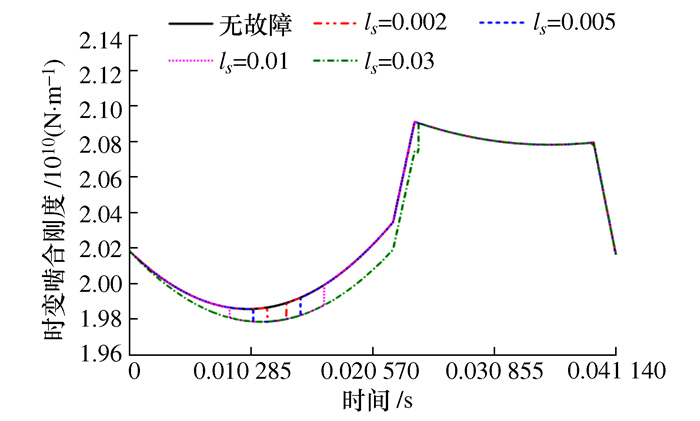
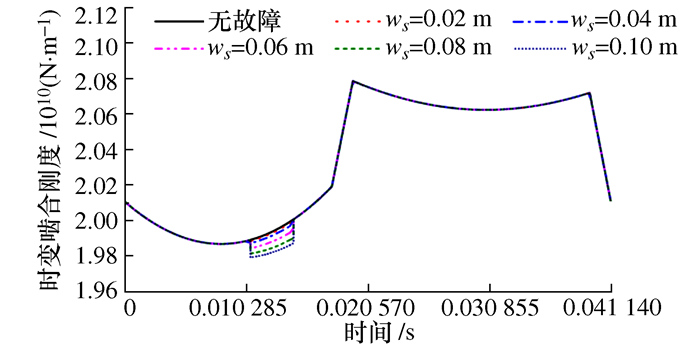
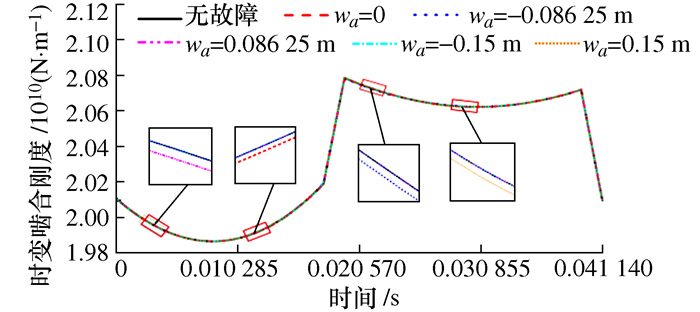
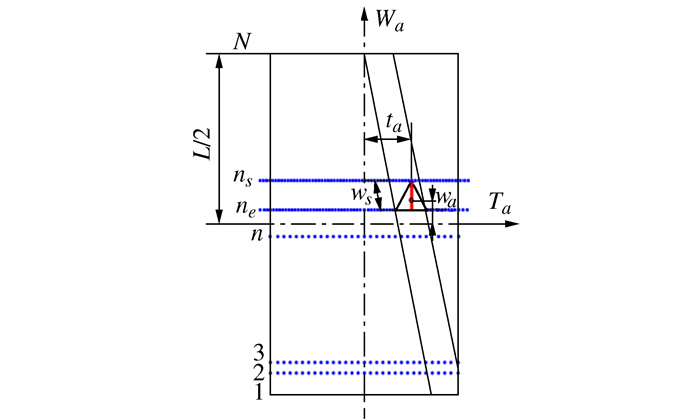
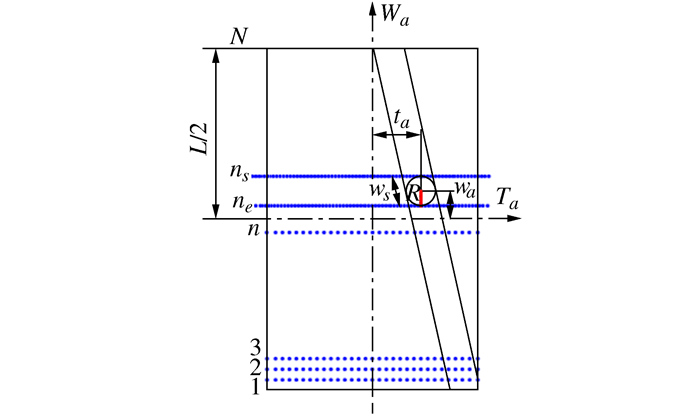
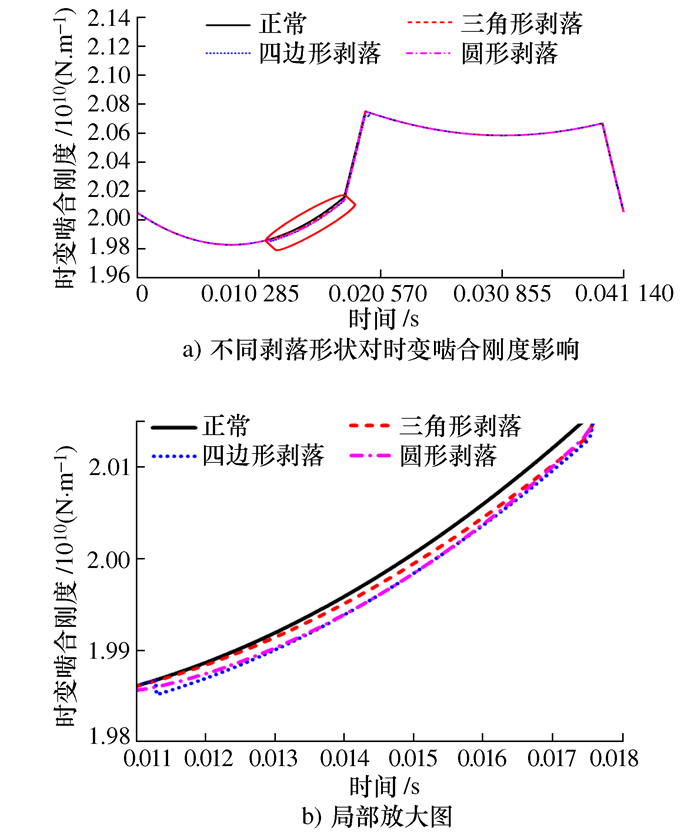
考虑斜齿轮副端面重合度大于轴向重合度时的单齿啮合接触线表达式, 针对行星轮系统中啮合齿轮中基圆大于齿根圆的情况, 建立斜齿轮变截面悬臂梁模型, 采用势能法、切片法和自适应递推复合Lobatto数值积分法求解斜齿轮时变啮合刚度, 通过与有限元方法及经验法进行对比, 验证所建模型的可行性。在此基础上, 分析了不同长度、宽度、径向位置(齿根到齿顶)的剥落故障及不同剥落形状对时变啮合刚度的影响, 研究结果表明: 不同剥落长度对斜齿轮副在剥落区域的啮合位置影响较为明显; 随着剥落宽度的增加, 时变啮合刚度线性降低, 不同径向位置剥落, 在越靠近齿根的位置对时变啮合刚度影响越大; 不同剥落形状下, 三角形和圆形剥落引起时变啮合刚度非线性降低, 四边形剥落使时变啮合刚度线性降低。
考虑斜齿轮副端面重合度大于轴向重合度时的单齿啮合接触线表达式, 针对行星轮系统中啮合齿轮中基圆大于齿根圆的情况, 建立斜齿轮变截面悬臂梁模型, 采用势能法、切片法和自适应递推复合Lobatto数值积分法求解斜齿轮时变啮合刚度, 通过与有限元方法及经验法进行对比, 验证所建模型的可行性。在此基础上, 分析了不同长度、宽度、径向位置(齿根到齿顶)的剥落故障及不同剥落形状对时变啮合刚度的影响, 研究结果表明: 不同剥落长度对斜齿轮副在剥落区域的啮合位置影响较为明显; 随着剥落宽度的增加, 时变啮合刚度线性降低, 不同径向位置剥落, 在越靠近齿根的位置对时变啮合刚度影响越大; 不同剥落形状下, 三角形和圆形剥落引起时变啮合刚度非线性降低, 四边形剥落使时变啮合刚度线性降低。






2021, 40(6): 880-886.
doi: 10.13433/j.cnki.1003-8728.20200136
摘要:
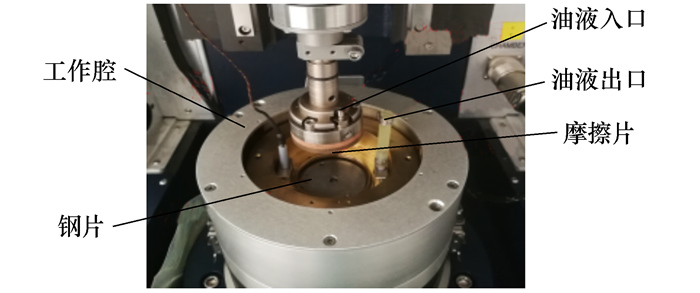
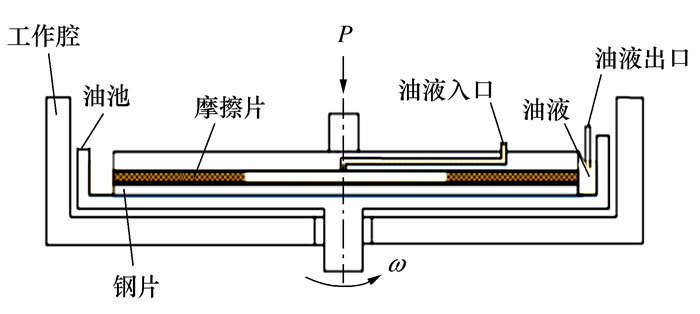
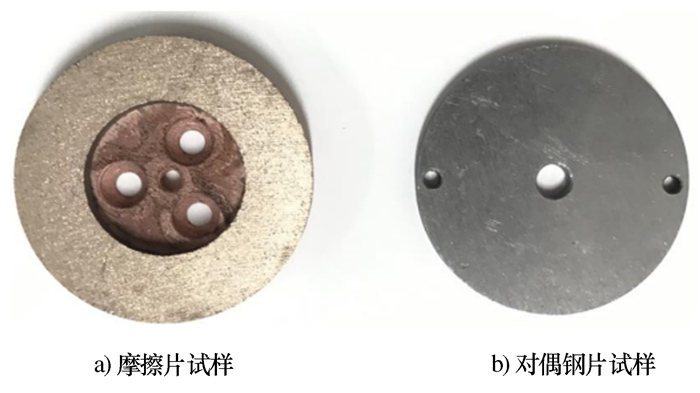
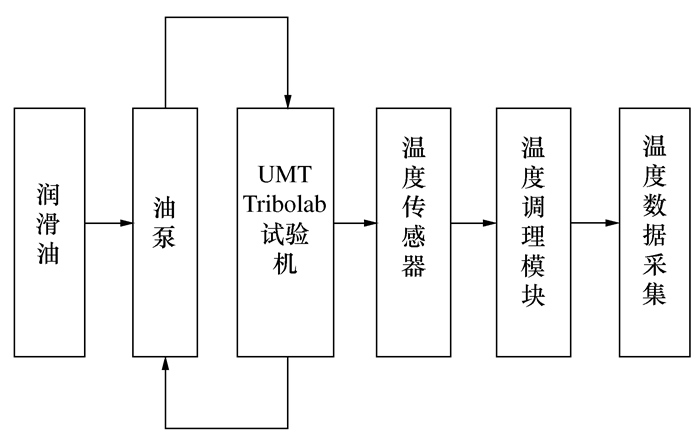
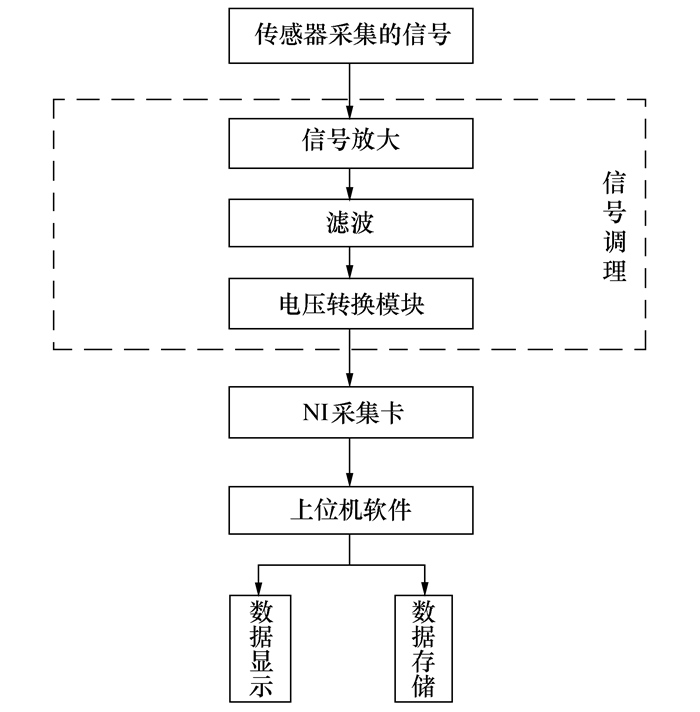
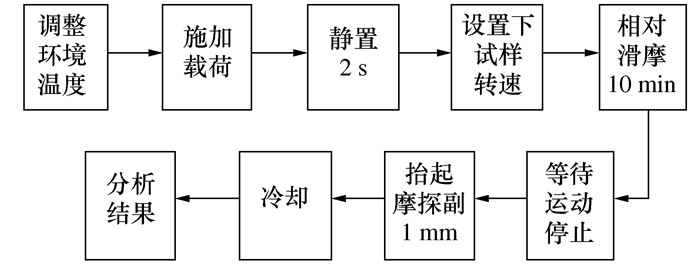
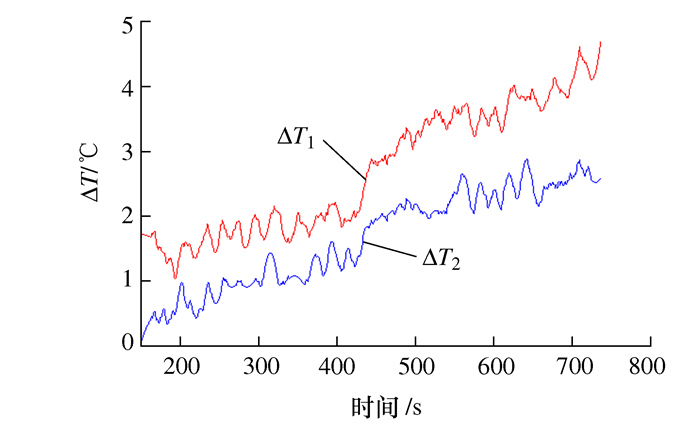
湿式离合器是机械传动系统核心部件, 热损伤是其主要失效形式, 对于摩擦副接触面瞬时温度的测量是研究此类问题的关键。本文针对在旋转滑摩过程中接触面实时温度难以测量的现状, 利用在摩擦片径向不同深度布置温度传感器的方法, 设计了基于UMT Tribolab摩擦磨损综合试验机的湿式摩擦副试验实时测温系统, 提出了温度测试方法与详细实验方案。实验数据表明, 测试系统能够实现在摩擦副相对滑摩过程中, 对摩擦接触表面不同位置的瞬时温度进行实时测量和采集, 为湿式摩擦副热分析提供了可靠的试验方法和测试数据。
湿式离合器是机械传动系统核心部件, 热损伤是其主要失效形式, 对于摩擦副接触面瞬时温度的测量是研究此类问题的关键。本文针对在旋转滑摩过程中接触面实时温度难以测量的现状, 利用在摩擦片径向不同深度布置温度传感器的方法, 设计了基于UMT Tribolab摩擦磨损综合试验机的湿式摩擦副试验实时测温系统, 提出了温度测试方法与详细实验方案。实验数据表明, 测试系统能够实现在摩擦副相对滑摩过程中, 对摩擦接触表面不同位置的瞬时温度进行实时测量和采集, 为湿式摩擦副热分析提供了可靠的试验方法和测试数据。






2021, 40(6): 887-892.
doi: 10.13433/j.cnki.1003-8728.20200135
摘要:
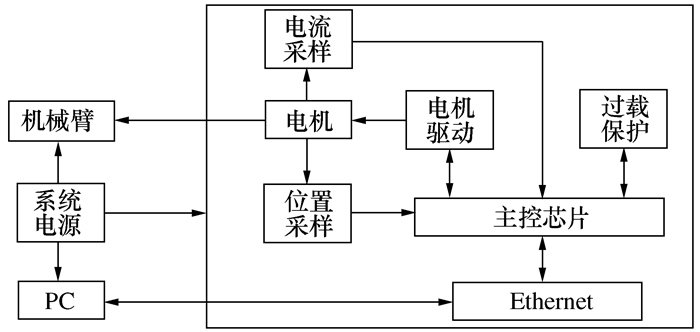
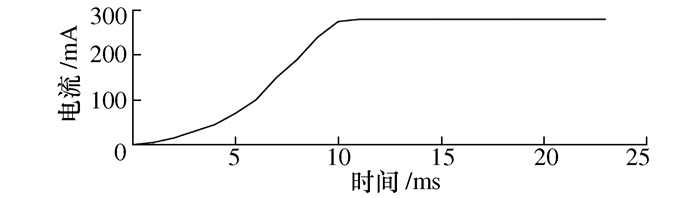
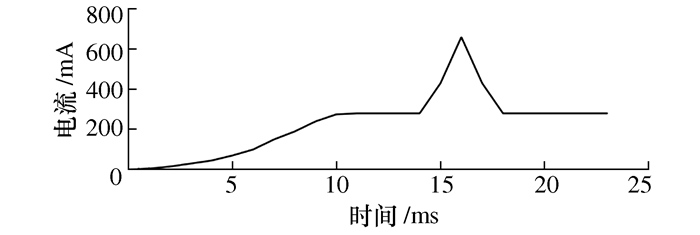
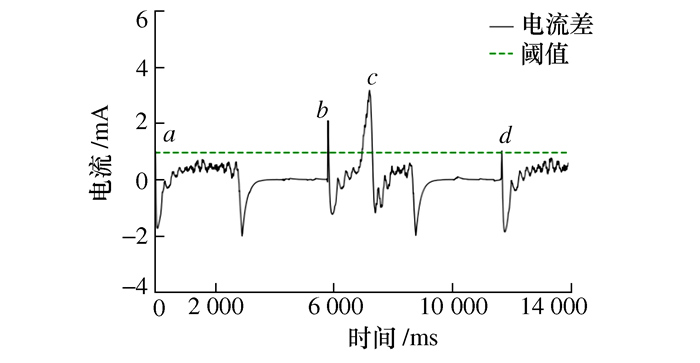
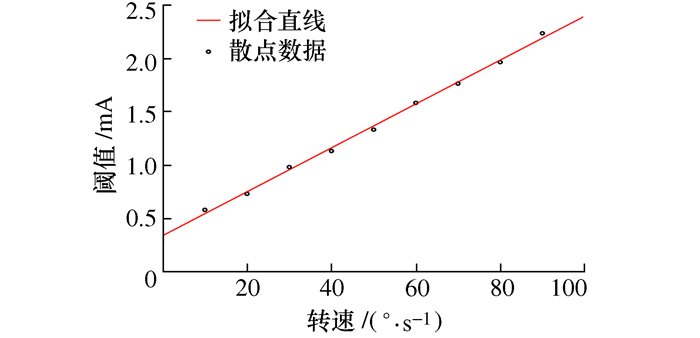
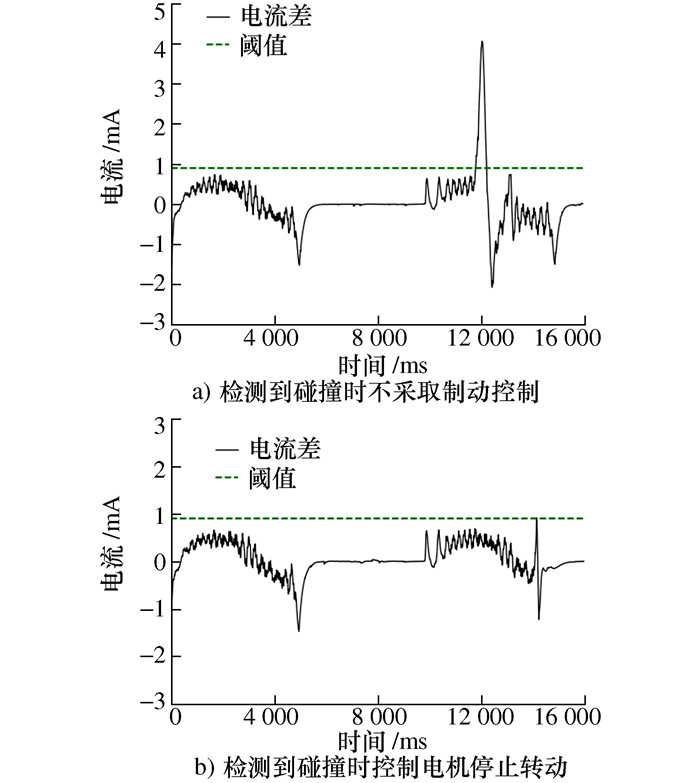
本文以机械臂碰撞检测为研究对象, 提出了一种基于电流变化速度的碰撞检测方法, 弥补动力学模型理论电流的碰撞检测方法存在参数辨识过程复杂、对动力学模型精度要求高等缺点。试验发现在机械臂有碰撞的时候会产生电流突变, 当电流变化速度大于给定的阈值时就判定有碰撞。通过大量试验发现电机不同转速下电流变化速度的阈值也不同, 于是提出电机转速的阈值检测方法, 用电机转速拟合关系式计算出电机在不同转速下的阈值, 从而判断电机在不同转速下是否存在碰撞。最终的碰撞检测试验结果表明, 当碰撞发生时, 机械臂可以快速检测到碰撞并做出相应反应, 达到预期目标。
本文以机械臂碰撞检测为研究对象, 提出了一种基于电流变化速度的碰撞检测方法, 弥补动力学模型理论电流的碰撞检测方法存在参数辨识过程复杂、对动力学模型精度要求高等缺点。试验发现在机械臂有碰撞的时候会产生电流突变, 当电流变化速度大于给定的阈值时就判定有碰撞。通过大量试验发现电机不同转速下电流变化速度的阈值也不同, 于是提出电机转速的阈值检测方法, 用电机转速拟合关系式计算出电机在不同转速下的阈值, 从而判断电机在不同转速下是否存在碰撞。最终的碰撞检测试验结果表明, 当碰撞发生时, 机械臂可以快速检测到碰撞并做出相应反应, 达到预期目标。








2021, 40(6): 893-899.
doi: 10.13433/j.cnki.1003-8728.20200131
摘要:
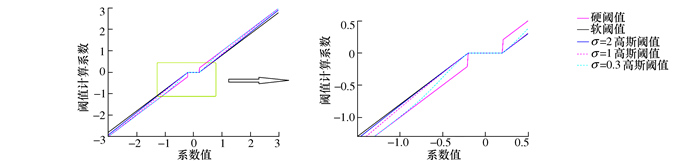
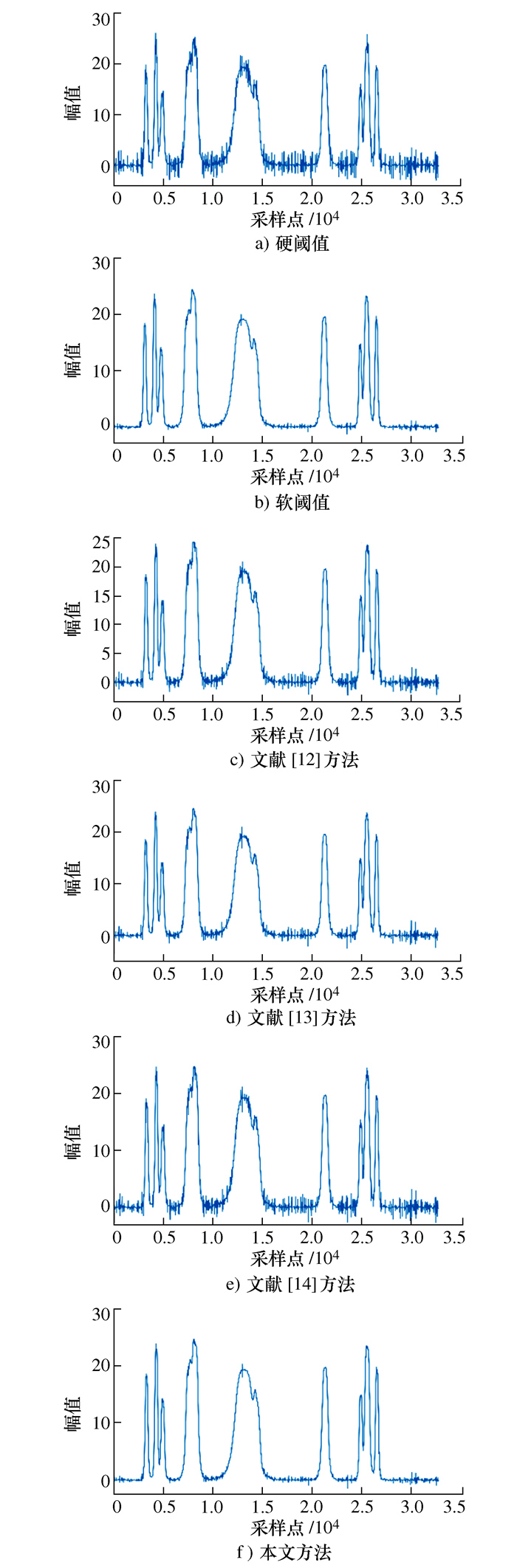
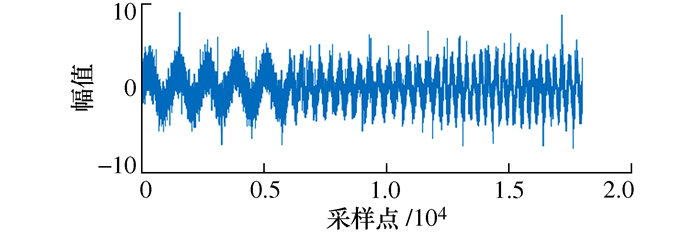
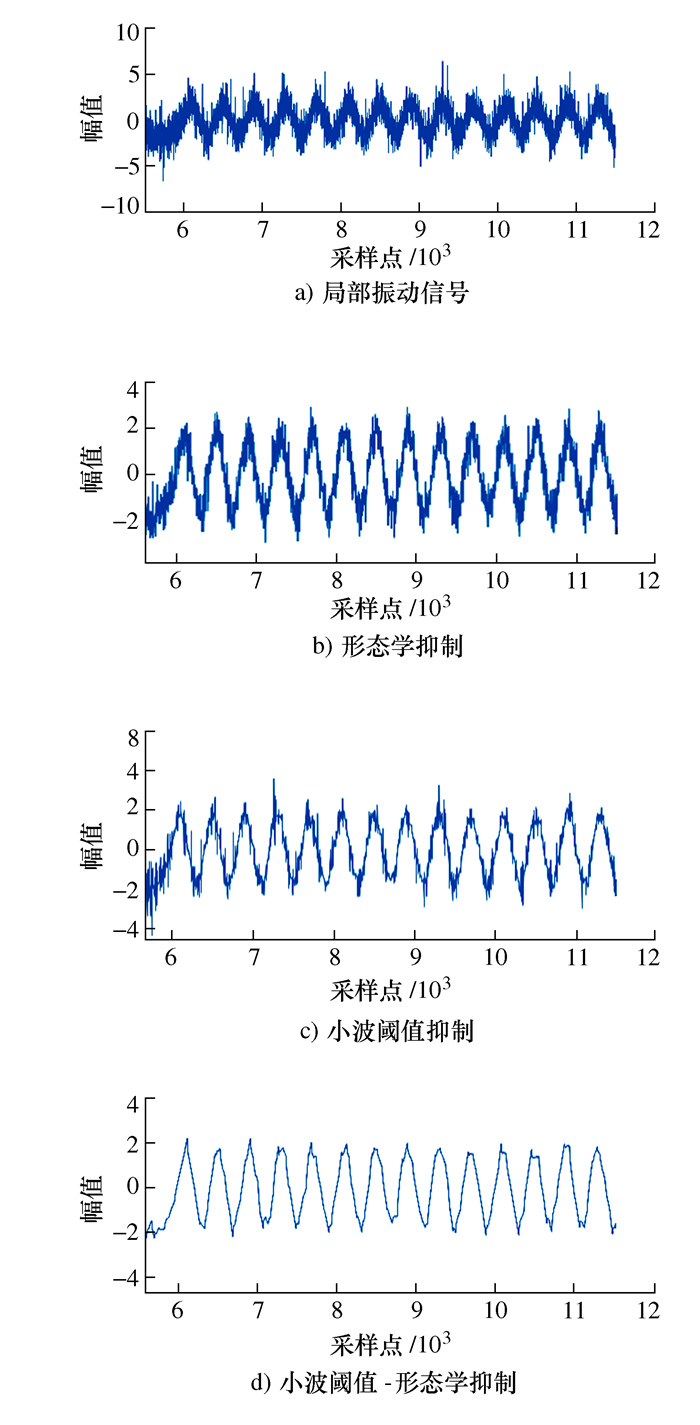
针对机械装备振动信号采集中含有脉冲噪声及高斯噪声等多种复杂污染源的信号误差抑制去噪, 设计了小波阈值和形态学融合算法。首先, 在高斯平滑思想上引入改进的小波阈值函数, 能够调节阈值函数向小波分解系数真值的收敛趋势达到有效去除高斯噪声及避免稳态偏差的目的, 对比几种常用的函数算法, 提出的阈值函数取得了在信噪比提升及均方根误差抑制度量上的更优的效果。其次, 对比计算了多种形态学算子选择较优的算法用于去除脉冲噪声。最后, 将融合算法应用在机械臂振动信号的去噪实验中。结果表明, 算法能够有效去除噪声并保留信号特征。
针对机械装备振动信号采集中含有脉冲噪声及高斯噪声等多种复杂污染源的信号误差抑制去噪, 设计了小波阈值和形态学融合算法。首先, 在高斯平滑思想上引入改进的小波阈值函数, 能够调节阈值函数向小波分解系数真值的收敛趋势达到有效去除高斯噪声及避免稳态偏差的目的, 对比几种常用的函数算法, 提出的阈值函数取得了在信噪比提升及均方根误差抑制度量上的更优的效果。其次, 对比计算了多种形态学算子选择较优的算法用于去除脉冲噪声。最后, 将融合算法应用在机械臂振动信号的去噪实验中。结果表明, 算法能够有效去除噪声并保留信号特征。





2021, 40(6): 900-907.
doi: 10.13433/j.cnki.1003-8728.20200134
摘要:
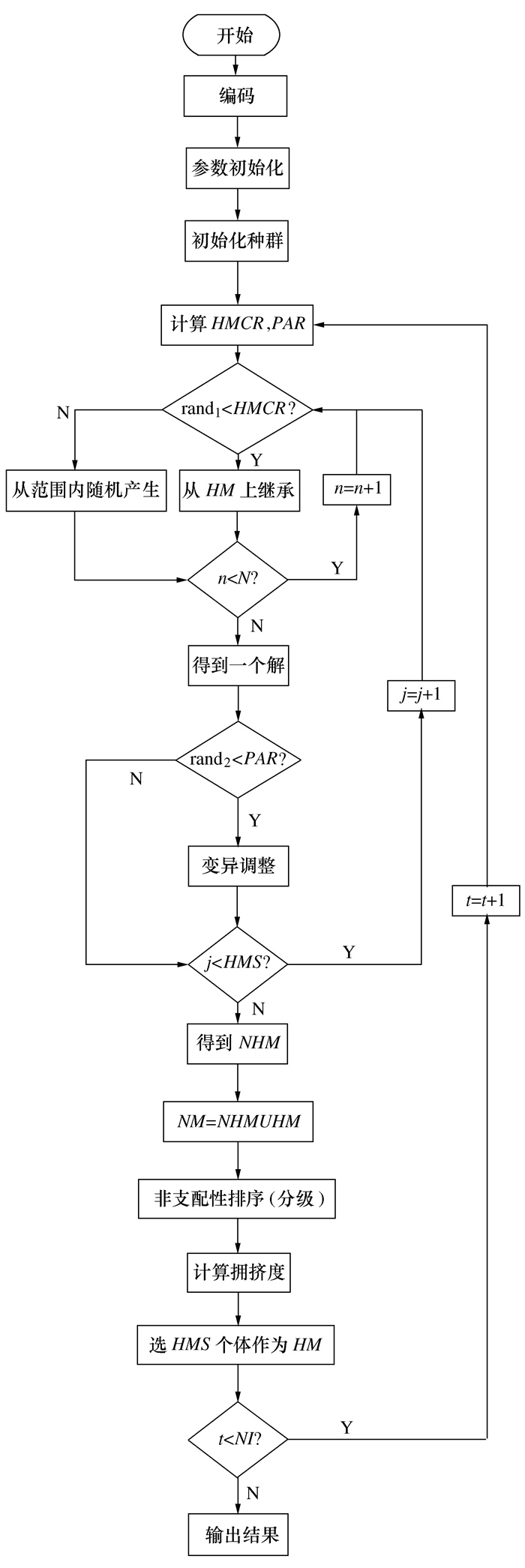
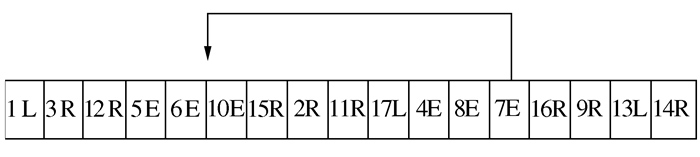
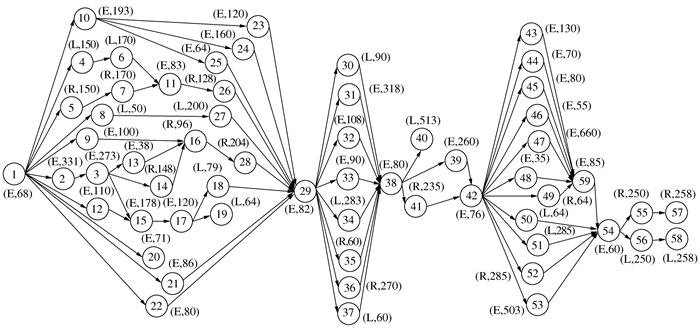
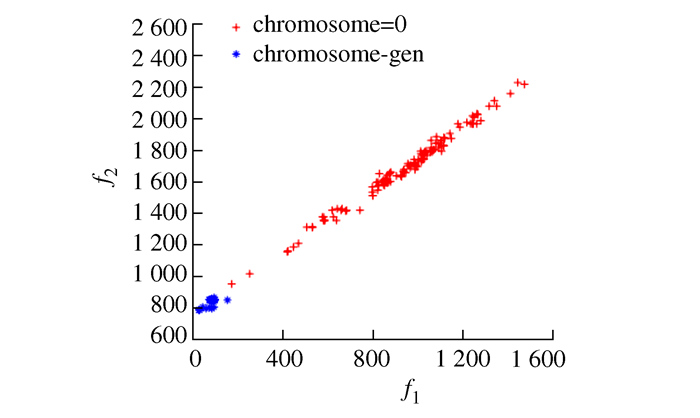
第二类多目标双边装配线问题由于其复杂性, 目前研究文献较少。为解决这一问题, 在建立二维数学模型的基础上, 提出改进和声搜索算法和非支配排序遗传算法相结合的一种混合算法, 通过即兴创作过程进行全局搜索, 变邻域搜索结构(插入和重组)进行局部搜索。对于E型作业, 通过左右工位最早可开始时间进行动态对比选择最早的工位, 尽量减少等待时间。采用NSGA-2的非支配排序和拥挤度计算, 从而解决多目标的优化问题。最后选取实例进行求解分析, 得出其最优的生产节拍和平滑系数以及作业在各工位的分布情况, 从而验证了算法的有效性。
第二类多目标双边装配线问题由于其复杂性, 目前研究文献较少。为解决这一问题, 在建立二维数学模型的基础上, 提出改进和声搜索算法和非支配排序遗传算法相结合的一种混合算法, 通过即兴创作过程进行全局搜索, 变邻域搜索结构(插入和重组)进行局部搜索。对于E型作业, 通过左右工位最早可开始时间进行动态对比选择最早的工位, 尽量减少等待时间。采用NSGA-2的非支配排序和拥挤度计算, 从而解决多目标的优化问题。最后选取实例进行求解分析, 得出其最优的生产节拍和平滑系数以及作业在各工位的分布情况, 从而验证了算法的有效性。





2021, 40(6): 908-911.
doi: 10.13433/j.cnki.1003-8728.20200139
摘要:
为实现磷锗锌(ZnGeP2)晶体超精密切削, 提高表面加工质量, 获得纳米级的超光滑表面, 基于纳米压痕实验计算出磷锗锌晶体表面脆塑转变临界深度。在此深度内切削材料产生脆塑转变, 并以塑性方式去除。在此基础上, 采用单点金刚石飞切机床DFC600A开展磷锗锌晶体超精密切削。通过控制切削深度低于磷锗锌晶体脆塑转变临界深度, 使材料表面仅发生塑性变形, 实现了晶体表面纳米级光滑表面加工, 表面粗糙度达1.01 nm, 达到了对磷锗锌晶体表面的加工要求, 验证了方法的有效性。
为实现磷锗锌(ZnGeP2)晶体超精密切削, 提高表面加工质量, 获得纳米级的超光滑表面, 基于纳米压痕实验计算出磷锗锌晶体表面脆塑转变临界深度。在此深度内切削材料产生脆塑转变, 并以塑性方式去除。在此基础上, 采用单点金刚石飞切机床DFC600A开展磷锗锌晶体超精密切削。通过控制切削深度低于磷锗锌晶体脆塑转变临界深度, 使材料表面仅发生塑性变形, 实现了晶体表面纳米级光滑表面加工, 表面粗糙度达1.01 nm, 达到了对磷锗锌晶体表面的加工要求, 验证了方法的有效性。




2021, 40(6): 912-920.
doi: 10.13433/j.cnki.1003-8728.20200141
摘要:
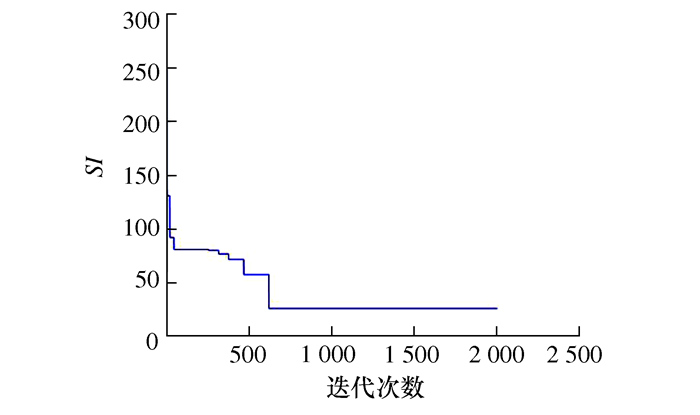
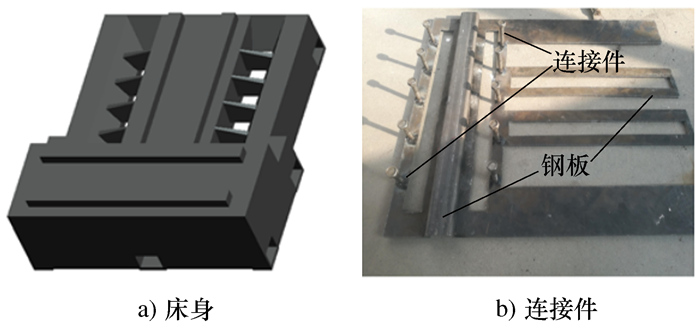
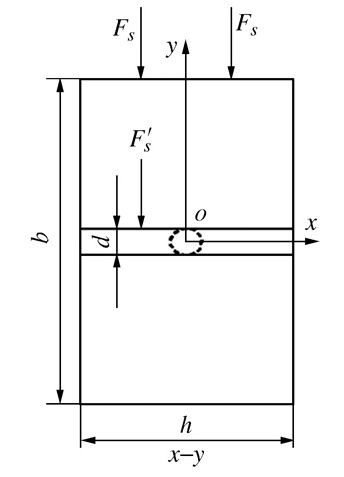
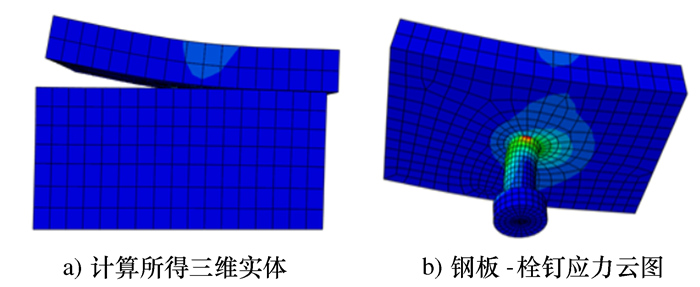
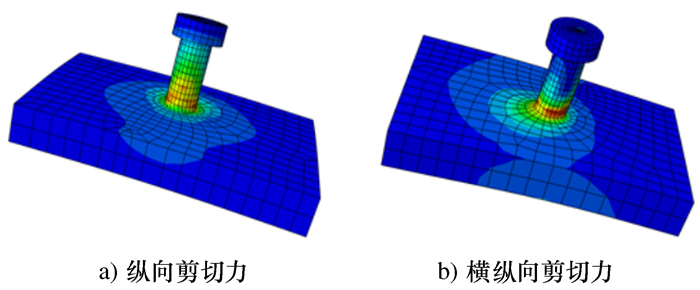
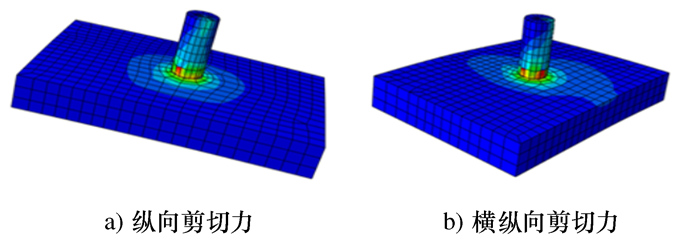
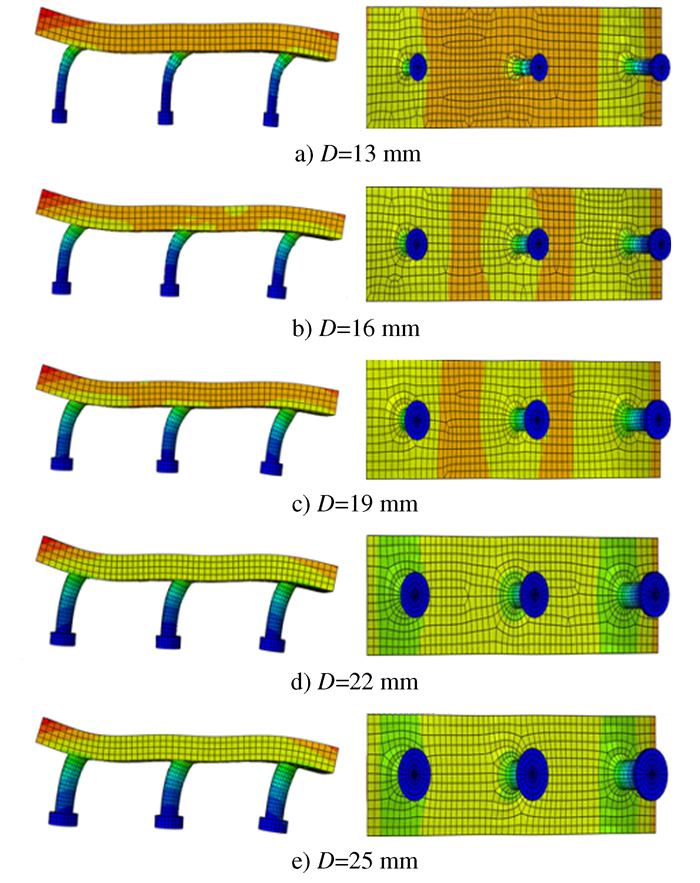
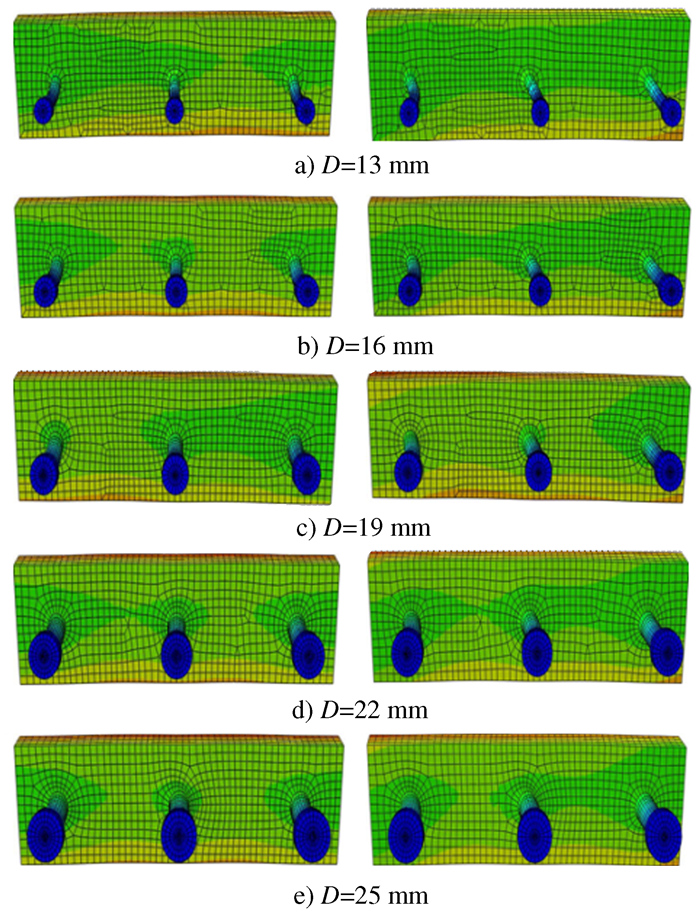
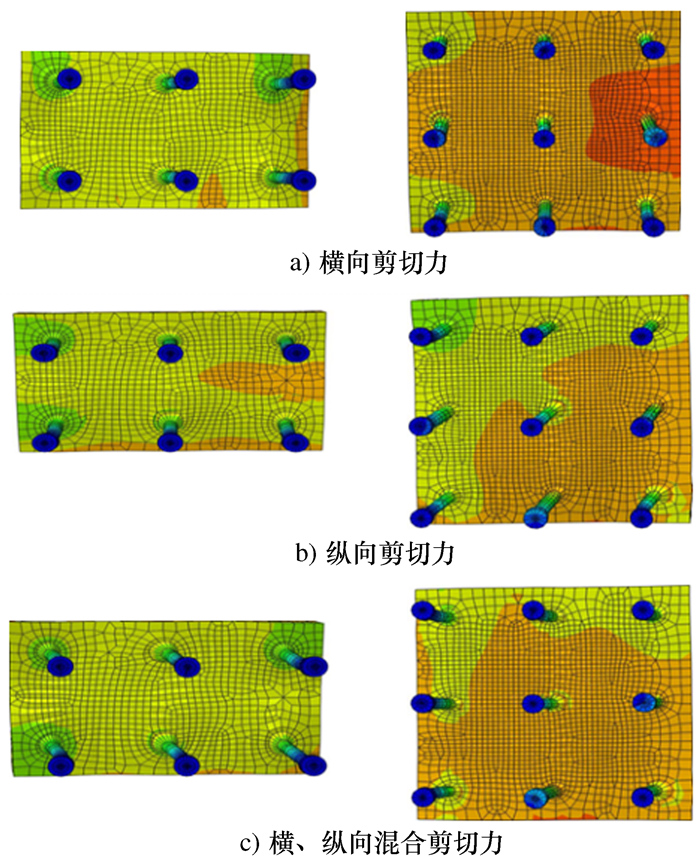
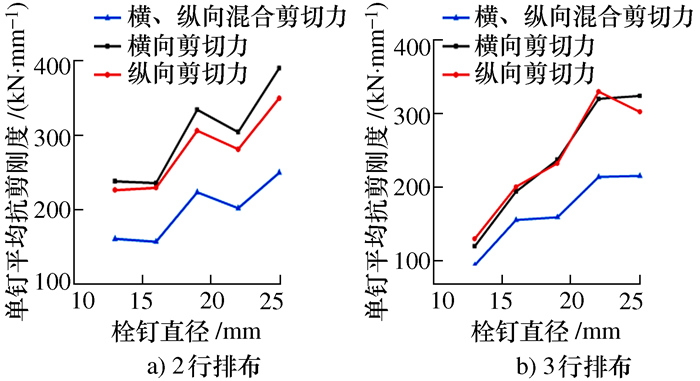
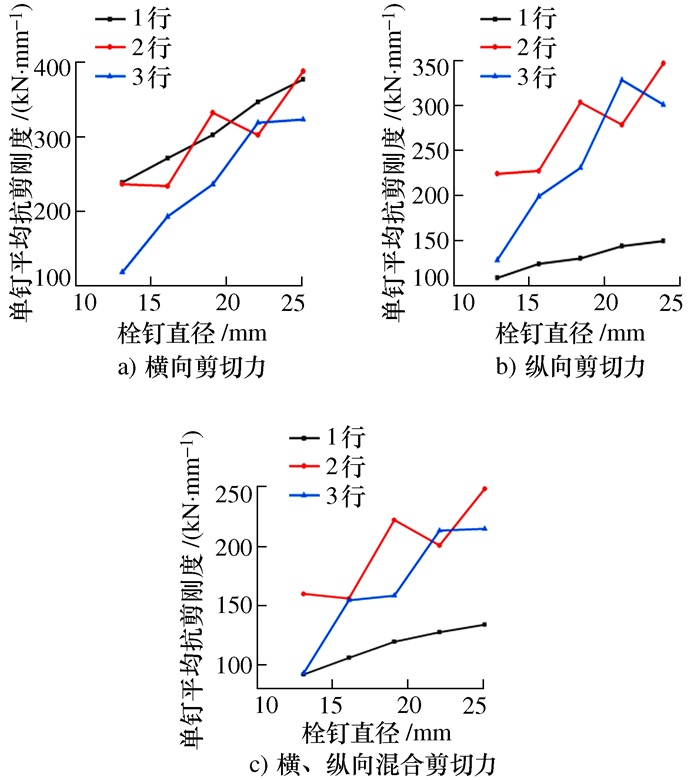
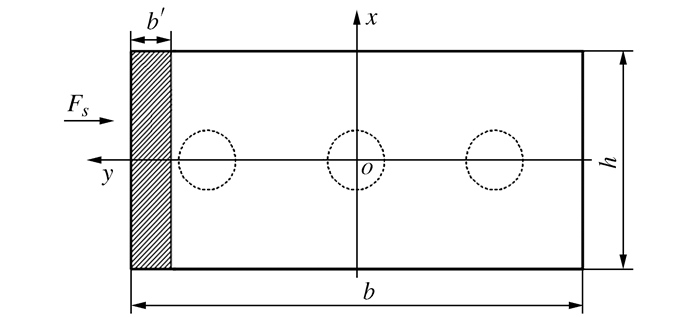
以外部钢板和内部填充混凝土的"三明治"式复合结构床身具有动力学和热力学稳定的特点。但由于切削载荷引起的剪切力作用, 内外层之间易发生"剥离"现象, 需要加强联结以抵抗剪切变形。针对连接件的抗剪分析和优化设计问题, 首先构建单钉单剪的物理模型, 利用等效替换将其结构简化为悬臂梁, 分析连接件的应力分布; 并对结构进行抗剪分析, 对比不同连接件的抗剪性能以确定连接件类型; 在此基础上, 以连接件直径、排布方式为研究因素进行有限元分析以确定群钉效应对力学性能的影响; 并进一步建立连接件的剪力传递理论以验证连接件的抗剪刚度规律。结果表明: 相同参数的连接件, 单栓钉受剪性能优于单螺栓, 不同直径的多栓钉受剪性能受其排布方式及受力方向的共同影响, 并且有限元分析结果与建立的受剪承载力计算公式吻合较好, 可为连接件在"三明治"式复合结构床身中的应用提供了理论基础。
以外部钢板和内部填充混凝土的"三明治"式复合结构床身具有动力学和热力学稳定的特点。但由于切削载荷引起的剪切力作用, 内外层之间易发生"剥离"现象, 需要加强联结以抵抗剪切变形。针对连接件的抗剪分析和优化设计问题, 首先构建单钉单剪的物理模型, 利用等效替换将其结构简化为悬臂梁, 分析连接件的应力分布; 并对结构进行抗剪分析, 对比不同连接件的抗剪性能以确定连接件类型; 在此基础上, 以连接件直径、排布方式为研究因素进行有限元分析以确定群钉效应对力学性能的影响; 并进一步建立连接件的剪力传递理论以验证连接件的抗剪刚度规律。结果表明: 相同参数的连接件, 单栓钉受剪性能优于单螺栓, 不同直径的多栓钉受剪性能受其排布方式及受力方向的共同影响, 并且有限元分析结果与建立的受剪承载力计算公式吻合较好, 可为连接件在"三明治"式复合结构床身中的应用提供了理论基础。









2021, 40(6): 921-927.
doi: 10.13433/j.cnki.1003-8728.20200164
摘要:
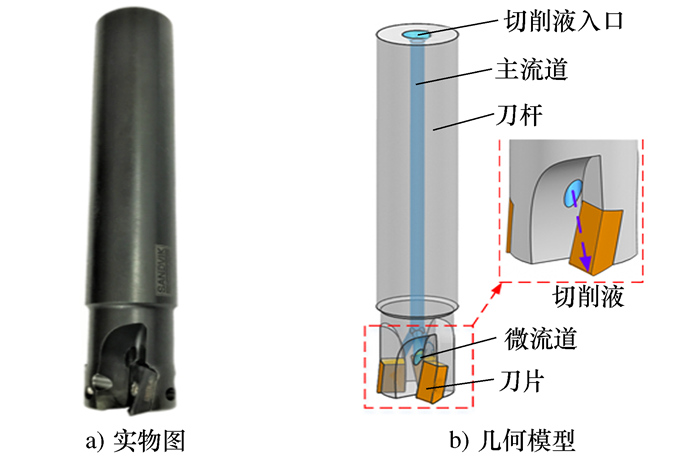
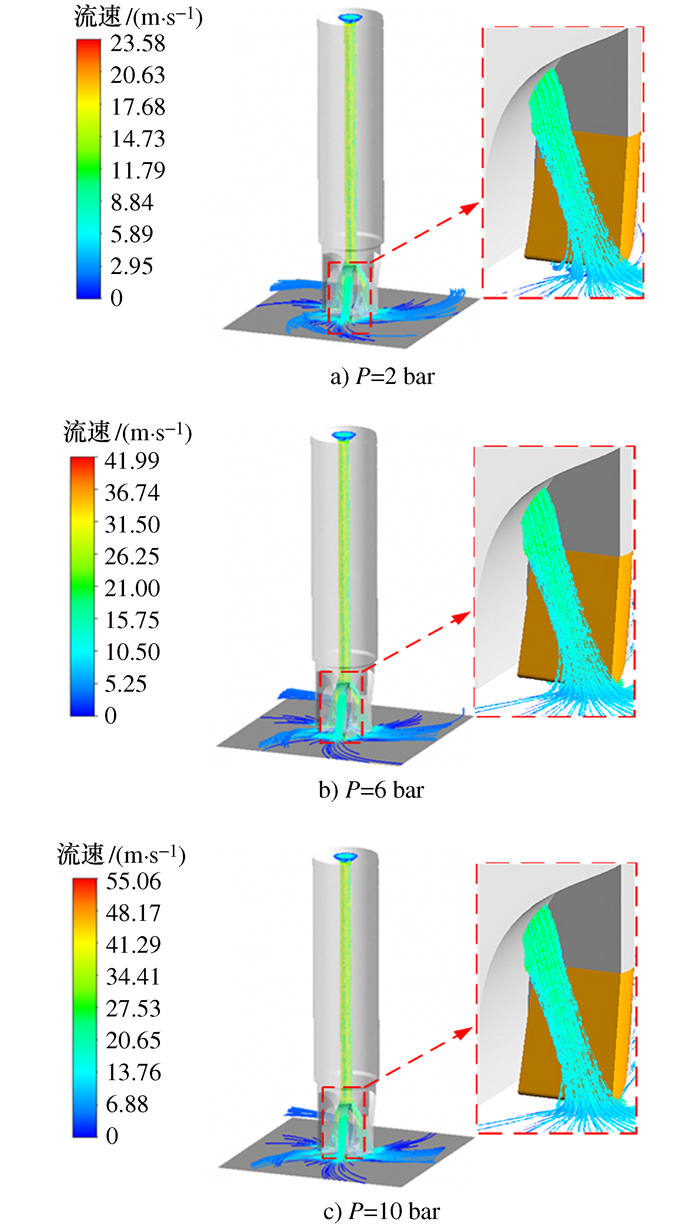
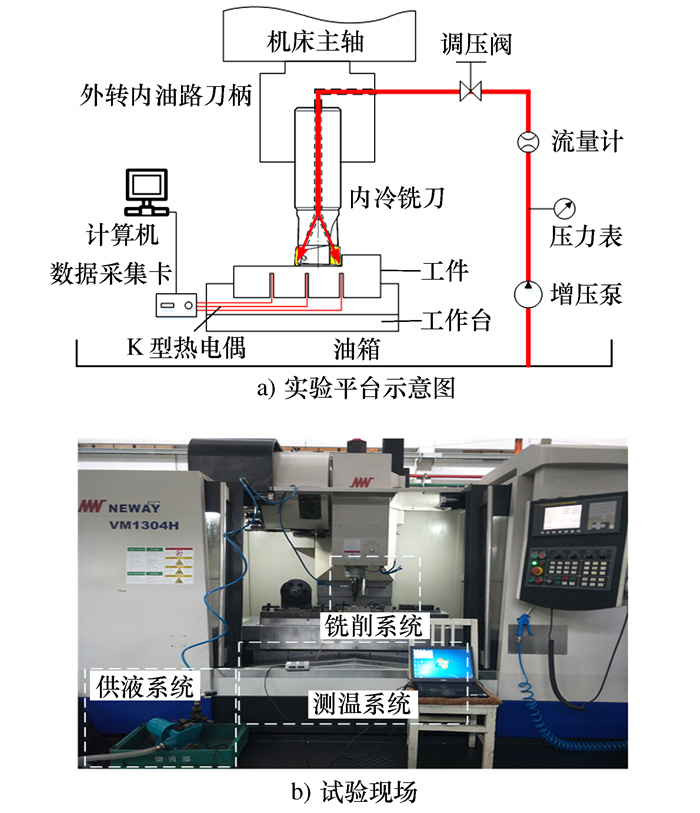
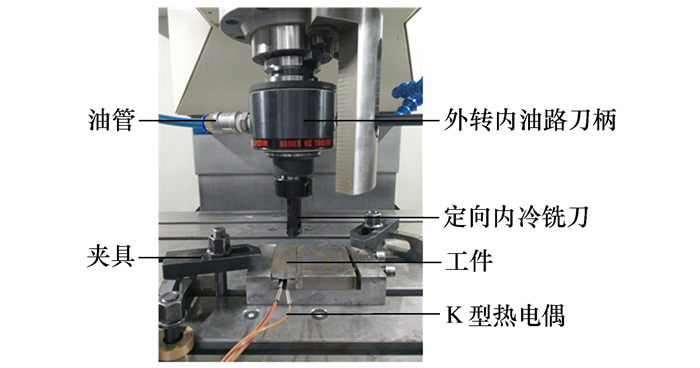
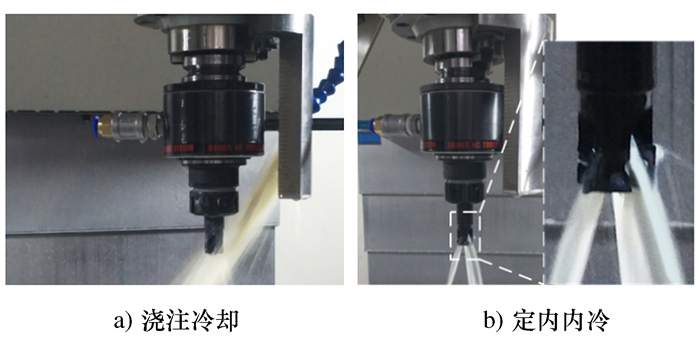
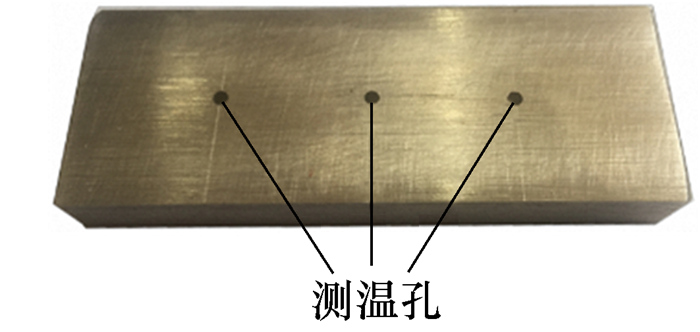
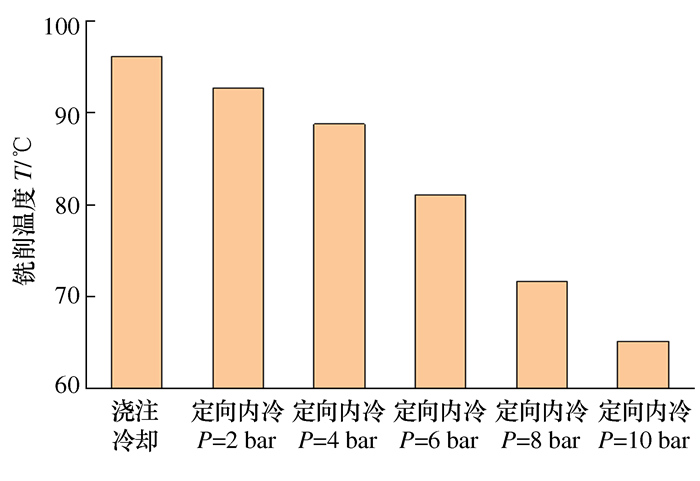
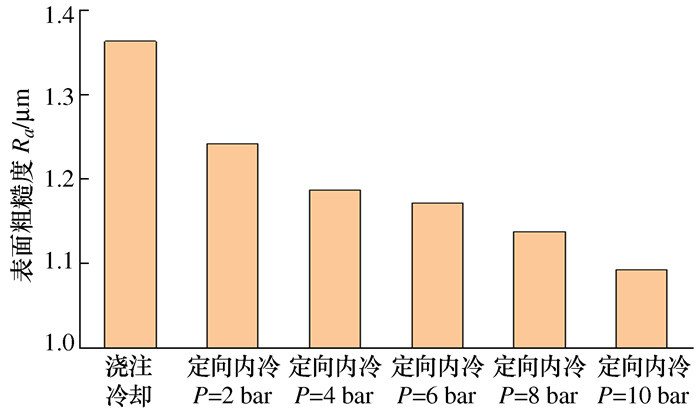
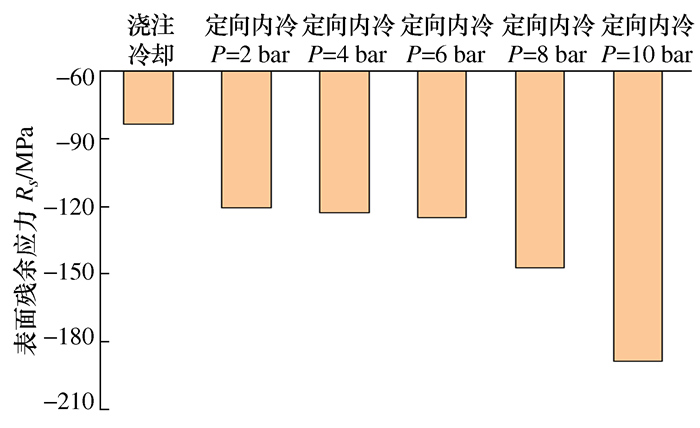
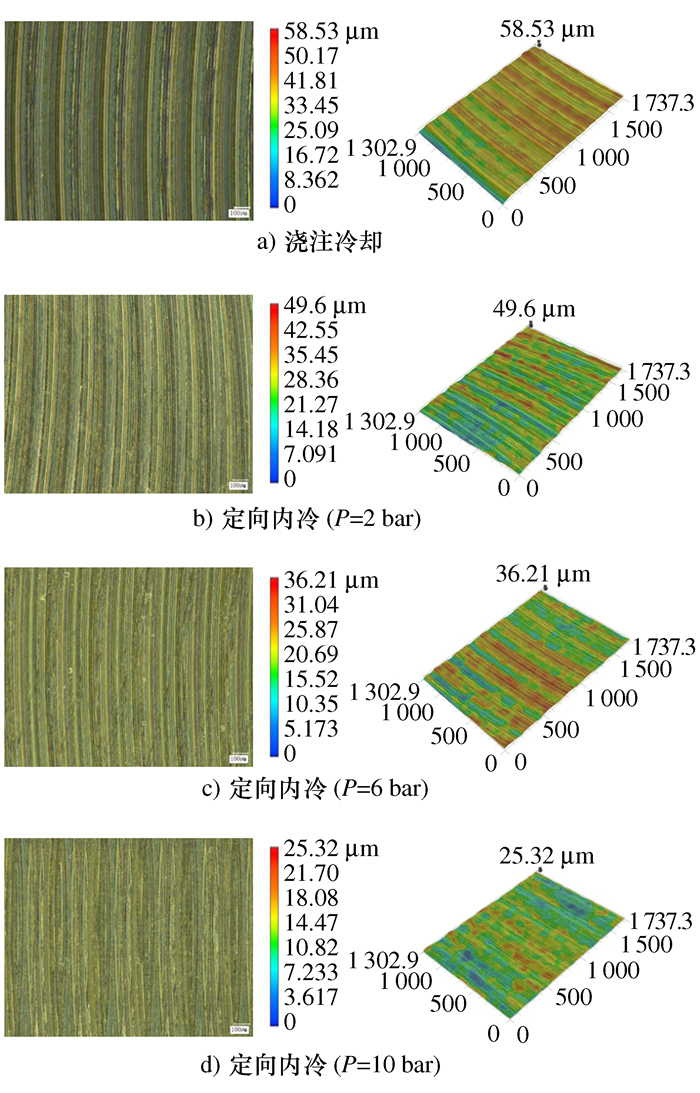
针对浇注冷却铣削镍基高温合金时因供液不充分产生的过热问题, 采用定向内冷方法改善铣削换热。采用计算流体动力学方法分析了定向内冷流场特性, 结果表明: 定向内冷可保证切削液准确集中喷射至切削区并改善换热。开展了浇注冷却、定向内冷的端铣试验, 实验结果表明: 在相同铣削参数下, 定向内冷具有更好的换热性能, 且随供液压力增加冷却效率增强, 当压力为10 bar时, 铣削温度、表面粗糙度和加工硬化分别降低32.2%、19.8%和11.9%, 表面残余压应力增加105.52 MPa, 获得了更规整的加工表面。
针对浇注冷却铣削镍基高温合金时因供液不充分产生的过热问题, 采用定向内冷方法改善铣削换热。采用计算流体动力学方法分析了定向内冷流场特性, 结果表明: 定向内冷可保证切削液准确集中喷射至切削区并改善换热。开展了浇注冷却、定向内冷的端铣试验, 实验结果表明: 在相同铣削参数下, 定向内冷具有更好的换热性能, 且随供液压力增加冷却效率增强, 当压力为10 bar时, 铣削温度、表面粗糙度和加工硬化分别降低32.2%、19.8%和11.9%, 表面残余压应力增加105.52 MPa, 获得了更规整的加工表面。




2021, 40(6): 928-933.
doi: 10.13433/j.cnki.1003-8728.20200124
摘要:
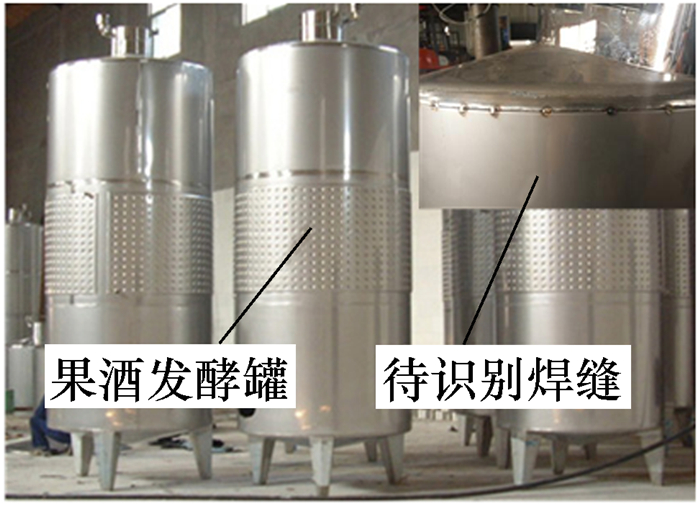
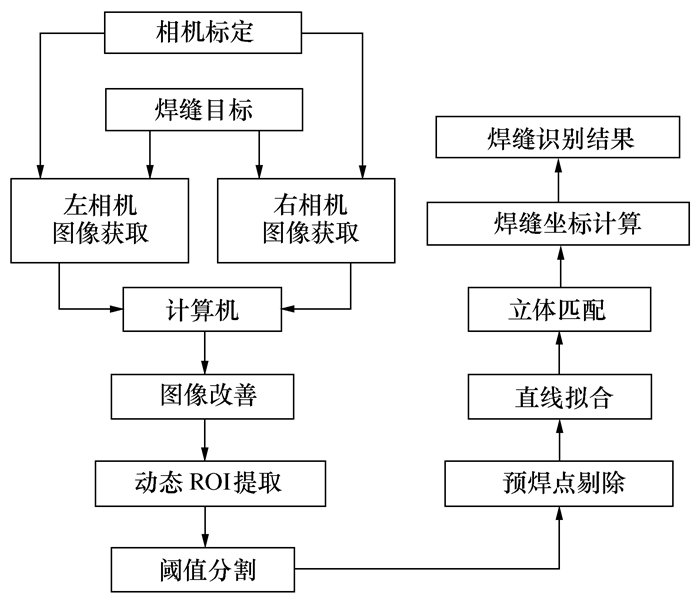
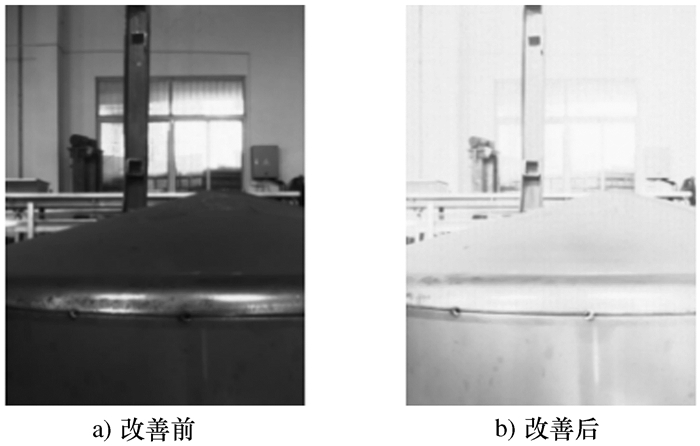
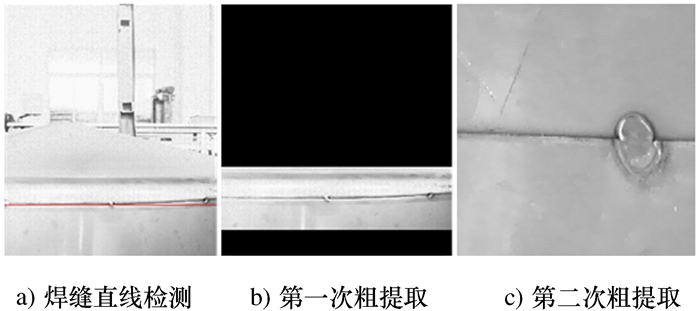
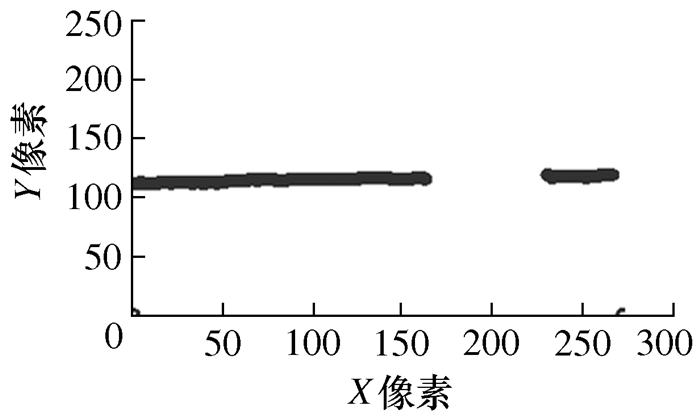
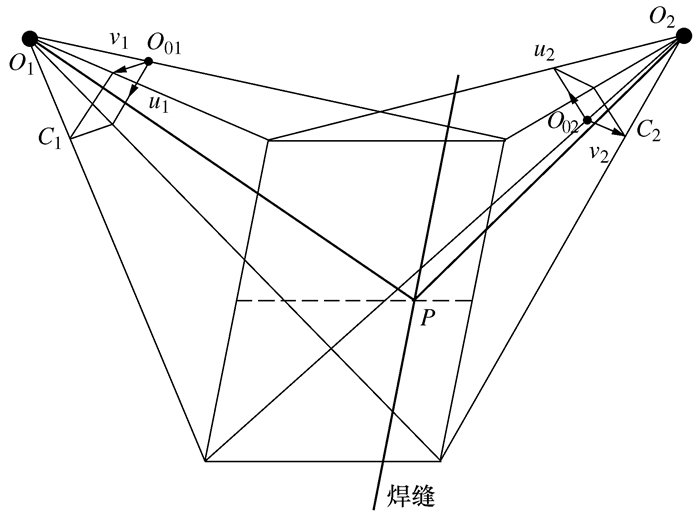
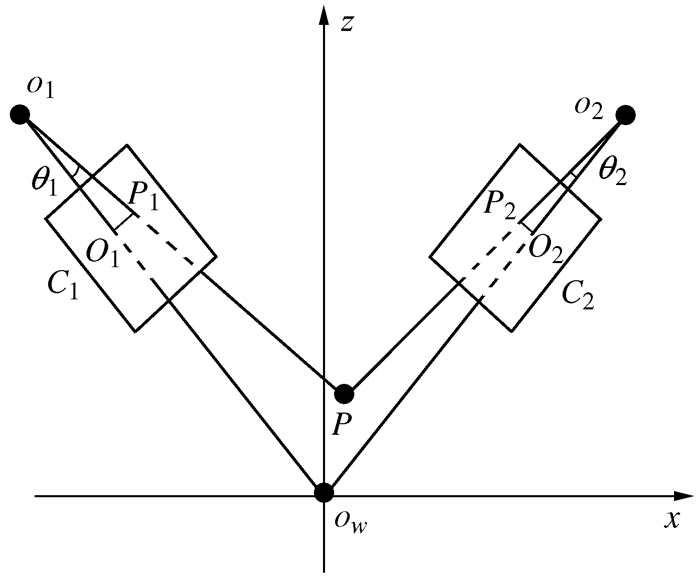
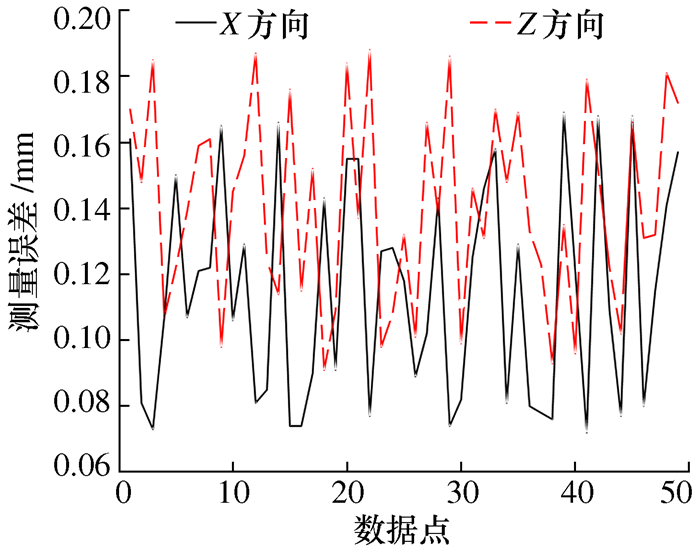
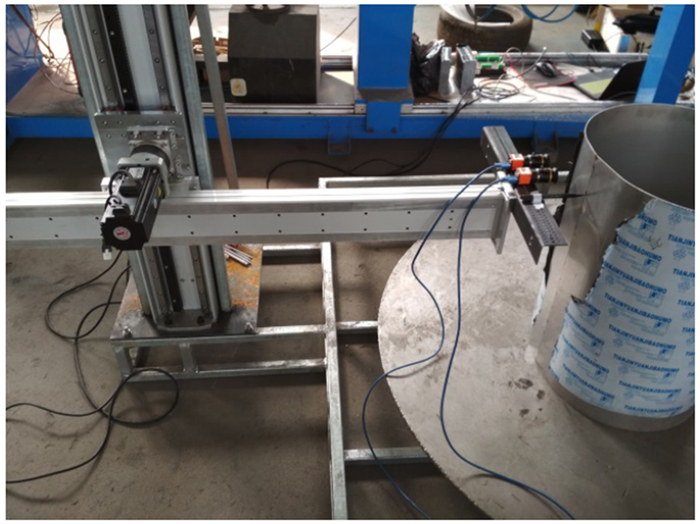
为有效解决非标罐体的环形焊缝识别问题,设计了一种基于被动双目视觉的环形焊缝定位与跟踪系统。首先改善左右相机采集到图像的图像质量,运用基于霍夫变换实现动态提取感兴趣区域(Region of interest, ROI)。然后经图像处理去噪,采用基于二值矩阵去除预焊点的方法来去除预焊点对焊缝识别的干扰,运用最小二乘法补全焊缝信息,拟合焊缝直线。接着利用改进后的双目视觉模型和基于极线的立体匹配方式,将环形焊缝细分为多个焊缝小区间内的直焊缝处理,计算并得到环形焊缝上焊点的空间坐标。实验结果表明,该系统平均误差为0.14 mm,并且可以准确地识别焊缝位置,验证了系统具有良好的精度。
为有效解决非标罐体的环形焊缝识别问题,设计了一种基于被动双目视觉的环形焊缝定位与跟踪系统。首先改善左右相机采集到图像的图像质量,运用基于霍夫变换实现动态提取感兴趣区域(Region of interest, ROI)。然后经图像处理去噪,采用基于二值矩阵去除预焊点的方法来去除预焊点对焊缝识别的干扰,运用最小二乘法补全焊缝信息,拟合焊缝直线。接着利用改进后的双目视觉模型和基于极线的立体匹配方式,将环形焊缝细分为多个焊缝小区间内的直焊缝处理,计算并得到环形焊缝上焊点的空间坐标。实验结果表明,该系统平均误差为0.14 mm,并且可以准确地识别焊缝位置,验证了系统具有良好的精度。







2021, 40(6): 934-940.
doi: 10.13433/j.cnki.1003-8728.20200140
摘要:
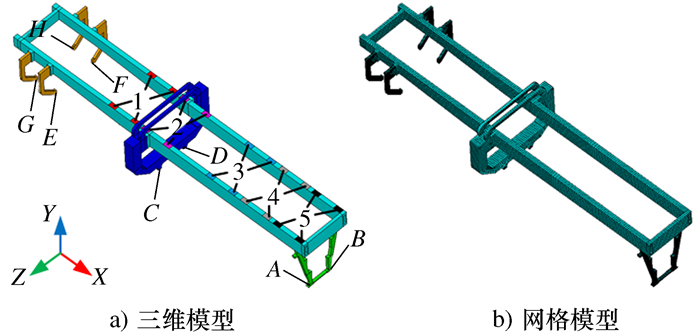
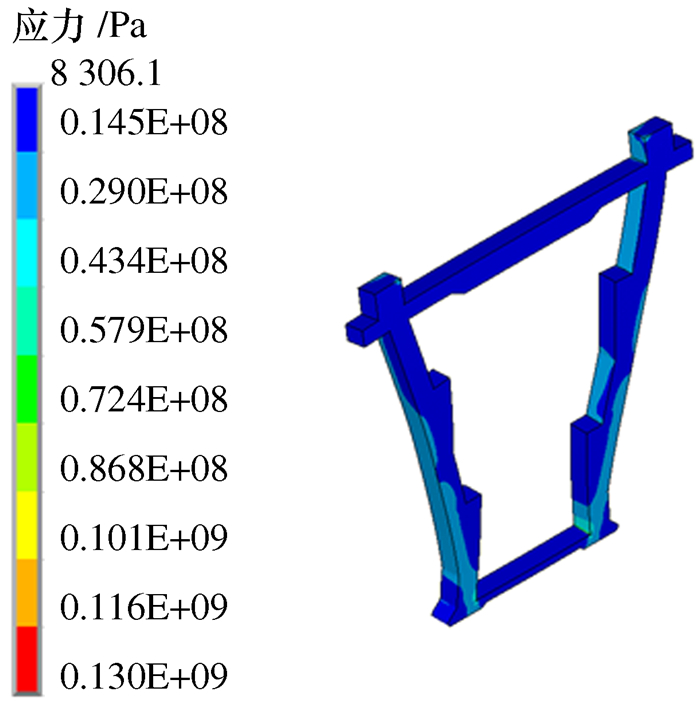
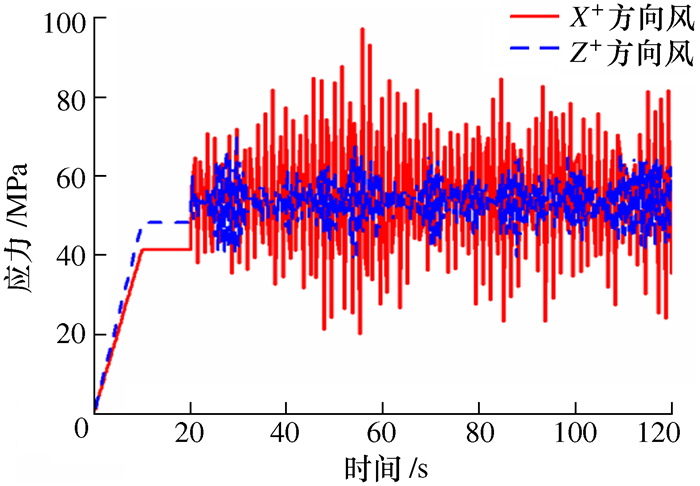
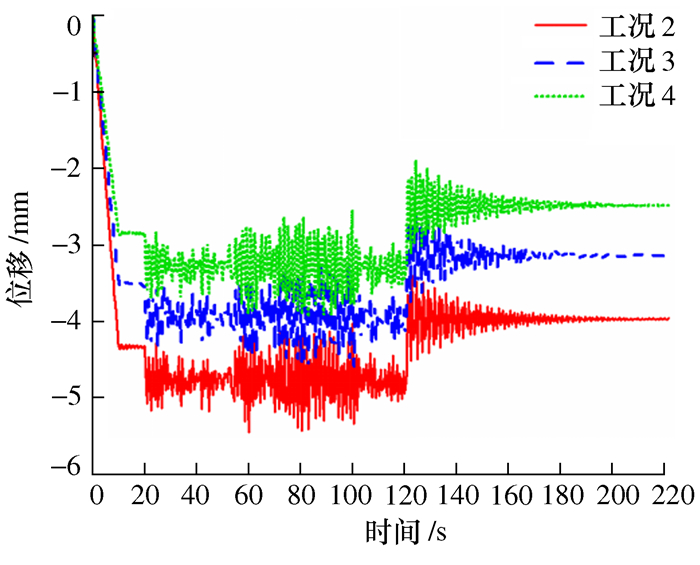
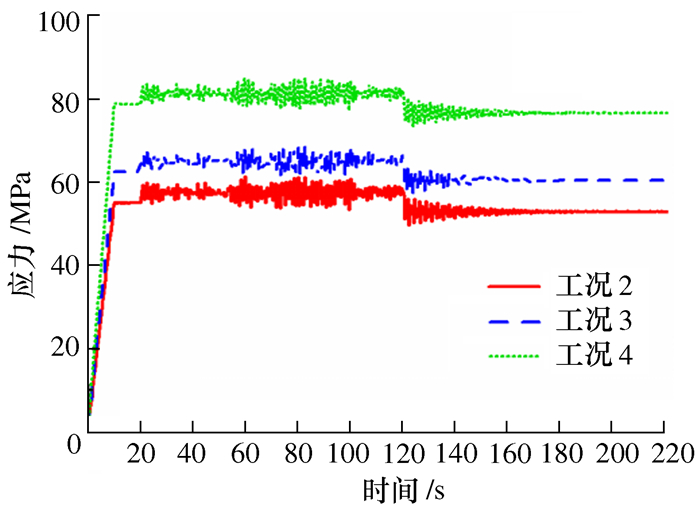
鉴于架桥机发生前倾或侧翻事故较多,对其在风载作用下的结构动态响应进行了研究。首先构建了具有指数风廓线和Kaimal脉动风功率谱特性的风场模型,并采用FFT技术得到自然风风载时程曲线;其次,针对风载情况下JQ900A型架桥机架桥的4种危险工况,建立了架桥机的有限元模型,通过静力学分析进一步确定危险工况下整机的危险部位;最终将风载作为输入条件,对架桥机进行瞬态动力学分析,研究其危险部位的位移及应力特性。结果表明: 轴线方向风载对架桥机结构动态响应影响最大,并且架桥机其他方向上稳定性和自身阻尼作用更强,因此更容易发生前倾事故。当处于半载和落梁工况时,主梁和前支腿的动态响应尤为明显,是实时监测和结构改进的重点。
鉴于架桥机发生前倾或侧翻事故较多,对其在风载作用下的结构动态响应进行了研究。首先构建了具有指数风廓线和Kaimal脉动风功率谱特性的风场模型,并采用FFT技术得到自然风风载时程曲线;其次,针对风载情况下JQ900A型架桥机架桥的4种危险工况,建立了架桥机的有限元模型,通过静力学分析进一步确定危险工况下整机的危险部位;最终将风载作为输入条件,对架桥机进行瞬态动力学分析,研究其危险部位的位移及应力特性。结果表明: 轴线方向风载对架桥机结构动态响应影响最大,并且架桥机其他方向上稳定性和自身阻尼作用更强,因此更容易发生前倾事故。当处于半载和落梁工况时,主梁和前支腿的动态响应尤为明显,是实时监测和结构改进的重点。







2021, 40(6): 941-948.
doi: 10.13433/j.cnki.1003-8728.20200137
摘要:
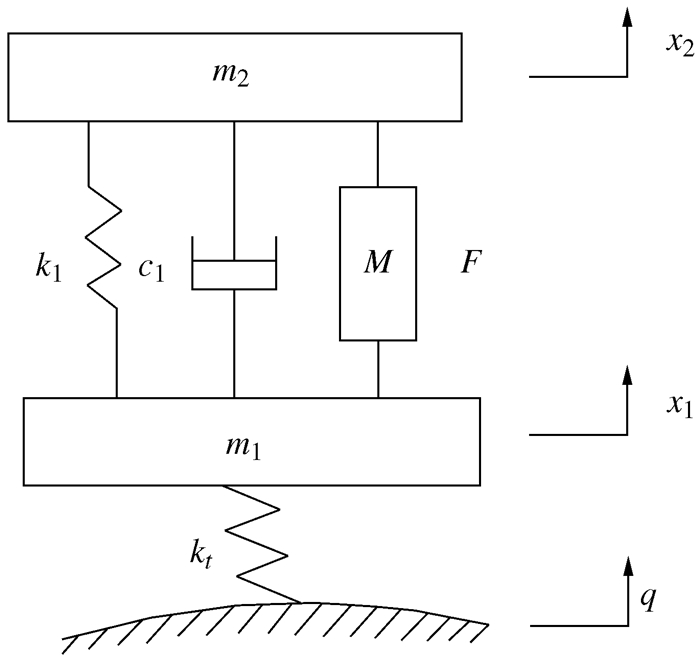
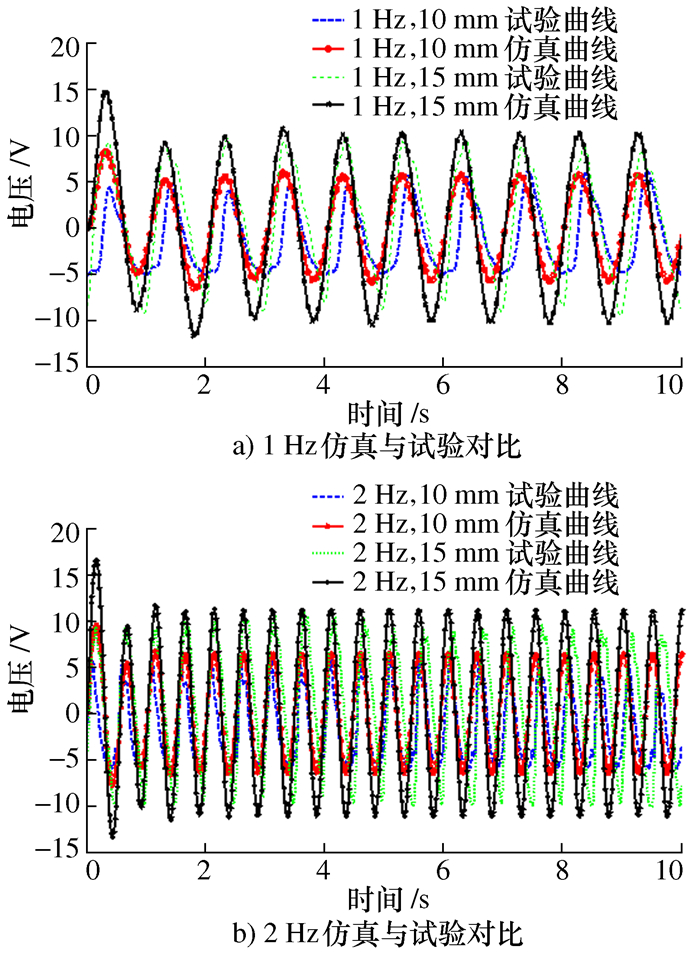
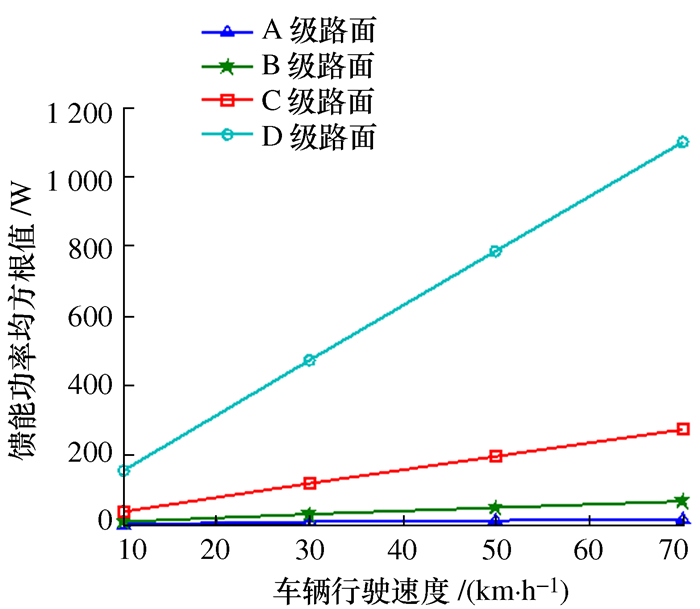
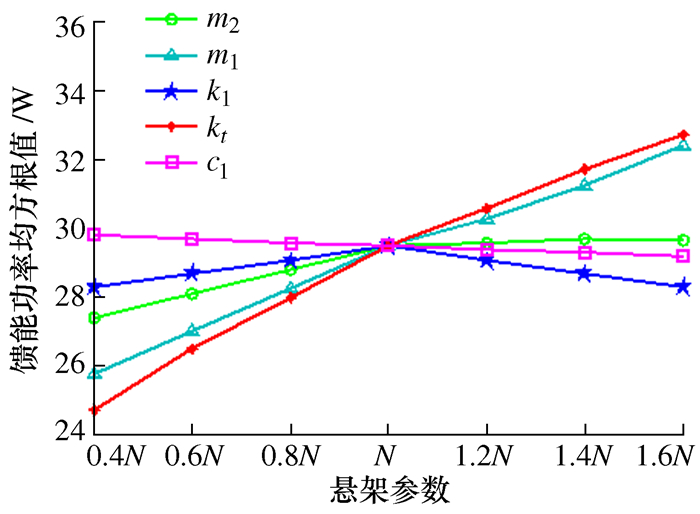
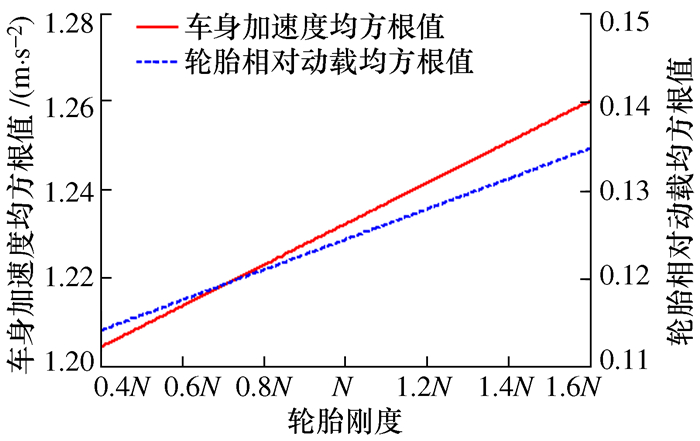
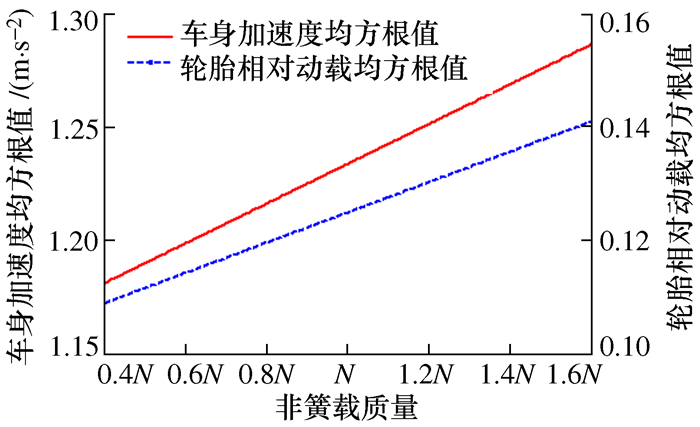
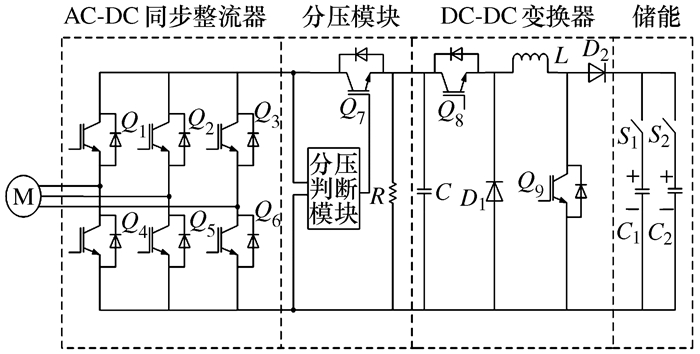
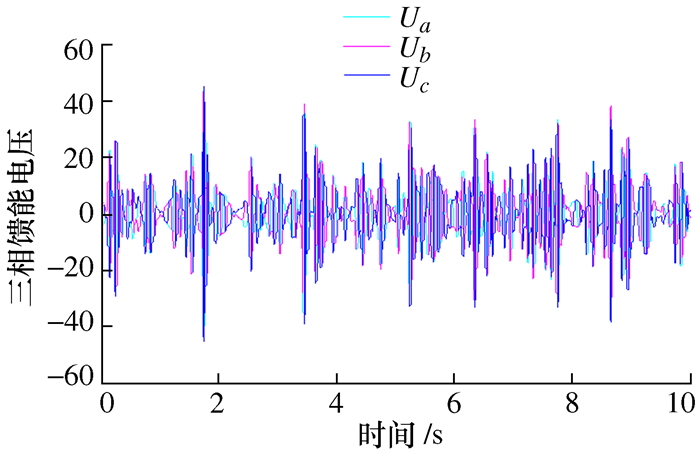
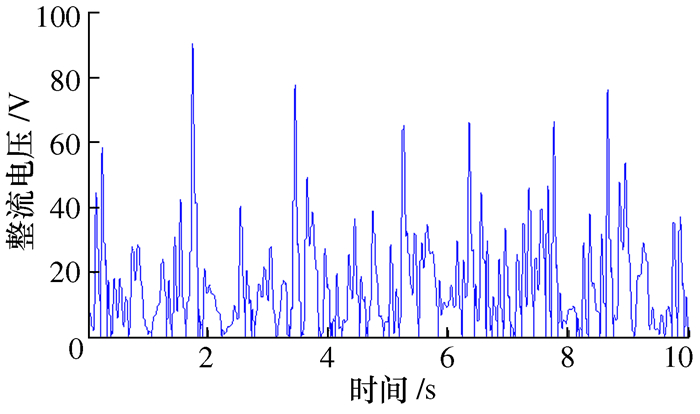
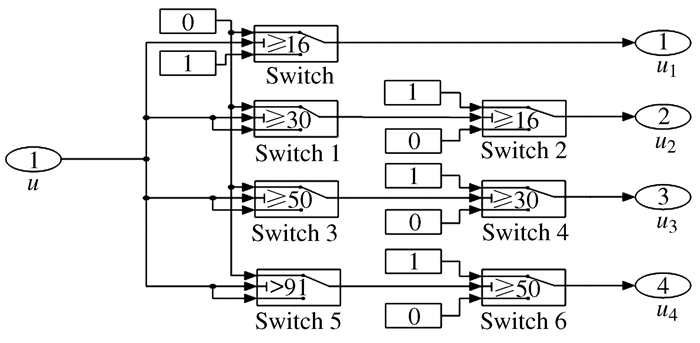
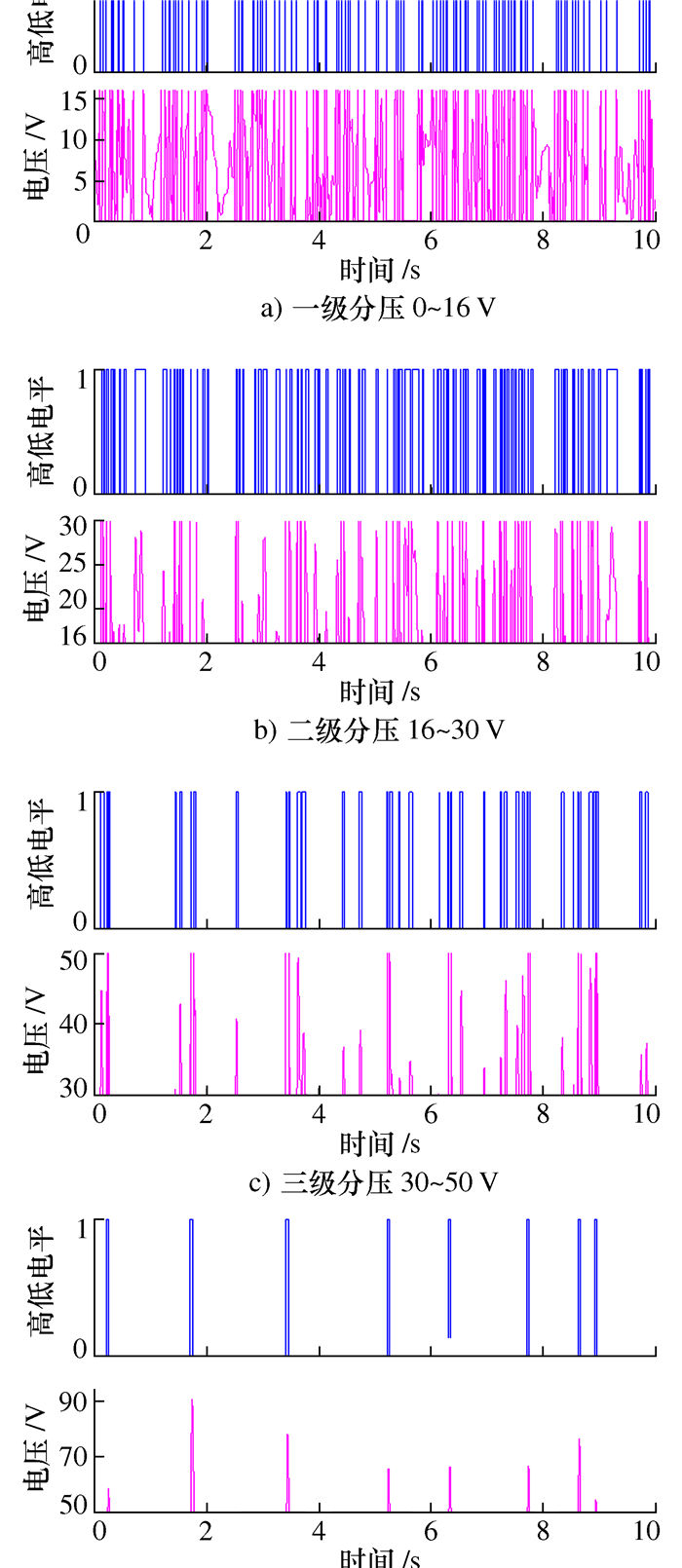
为了预测悬架馈能潜力及实现振动能量回收,针对电磁直线电机悬架结构,建立了1/4馈能悬架数学模型,并利用台架试验加以验证。以馈能功率均方根值为衡量指标,分析了包括行驶工况及悬架参数在内的馈能潜力影响因素,获得了各因素对悬架馈能潜力的影响显著性。在此基础上,设计了能量回收电路及升降压控制规则,运用MATLAB/Simulink对悬架能量回收性能进行仿真,并与无升降压控制规则进行对比分析。结果表明:升降压控制规则使能量回收效率提高了24.1%,所设计的能量回收电路及升降压控制规则能够有效地提高悬架振动能量回收。
为了预测悬架馈能潜力及实现振动能量回收,针对电磁直线电机悬架结构,建立了1/4馈能悬架数学模型,并利用台架试验加以验证。以馈能功率均方根值为衡量指标,分析了包括行驶工况及悬架参数在内的馈能潜力影响因素,获得了各因素对悬架馈能潜力的影响显著性。在此基础上,设计了能量回收电路及升降压控制规则,运用MATLAB/Simulink对悬架能量回收性能进行仿真,并与无升降压控制规则进行对比分析。结果表明:升降压控制规则使能量回收效率提高了24.1%,所设计的能量回收电路及升降压控制规则能够有效地提高悬架振动能量回收。





2021, 40(6): 949-954.
doi: 10.13433/j.cnki.1003-8728.20200163
摘要:
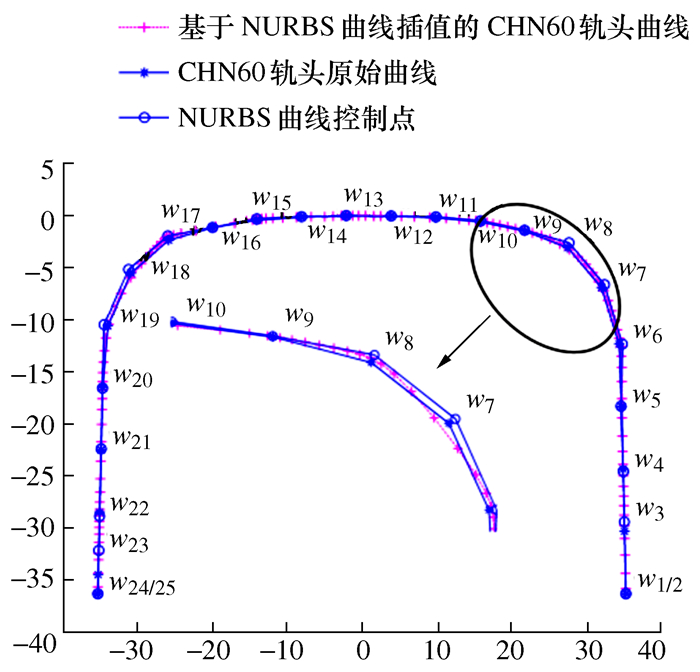
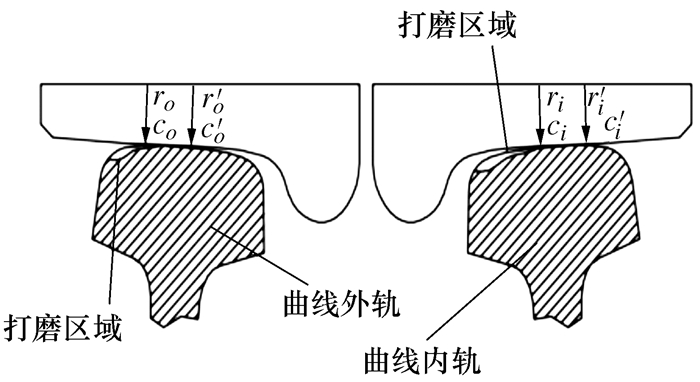
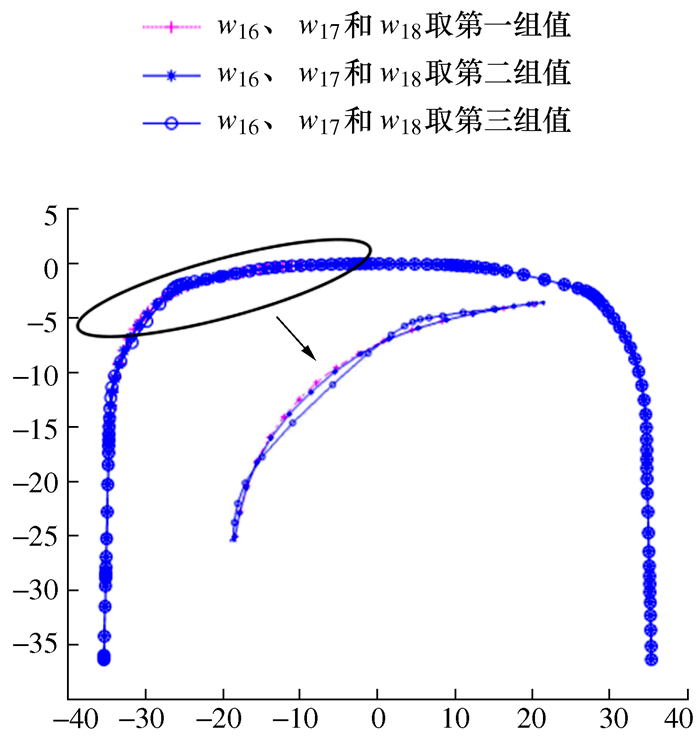
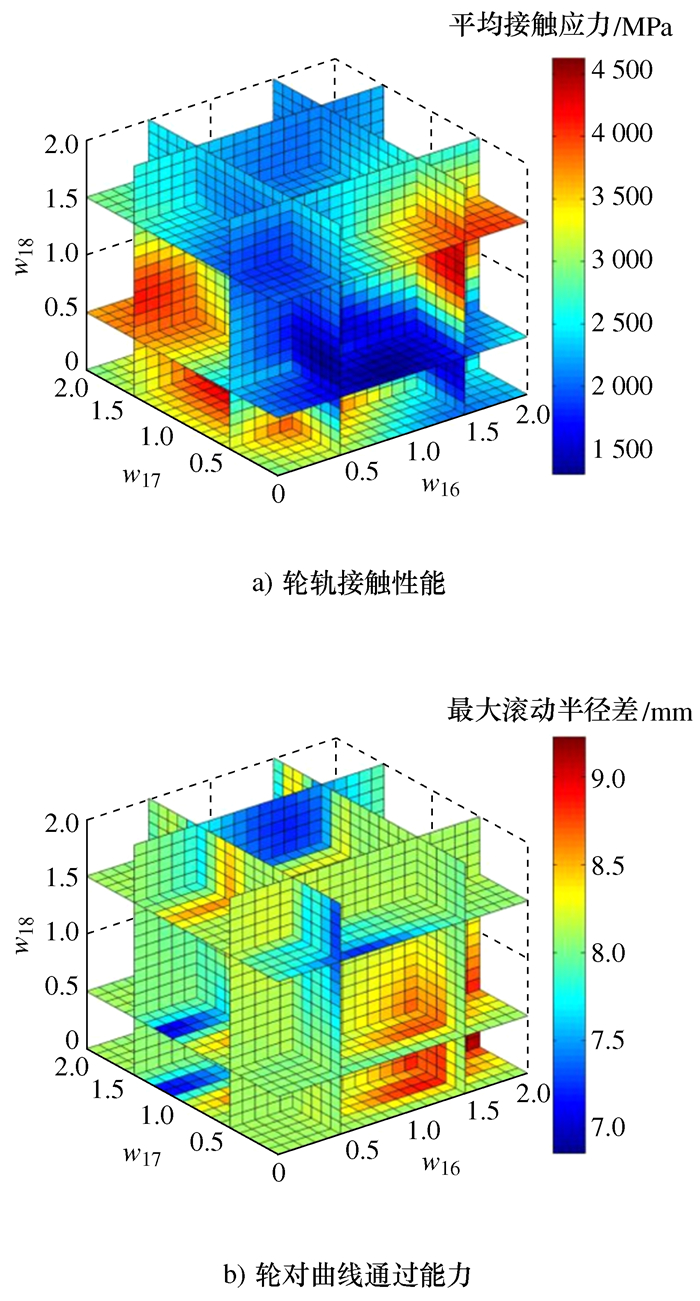
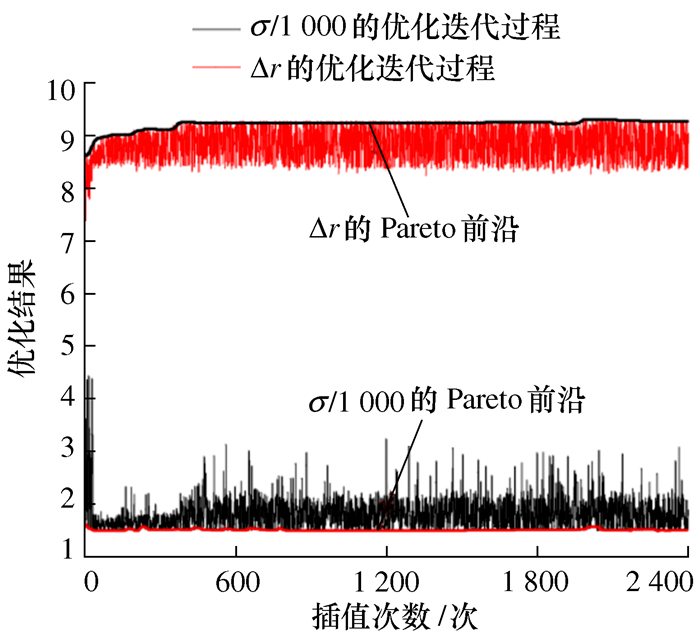
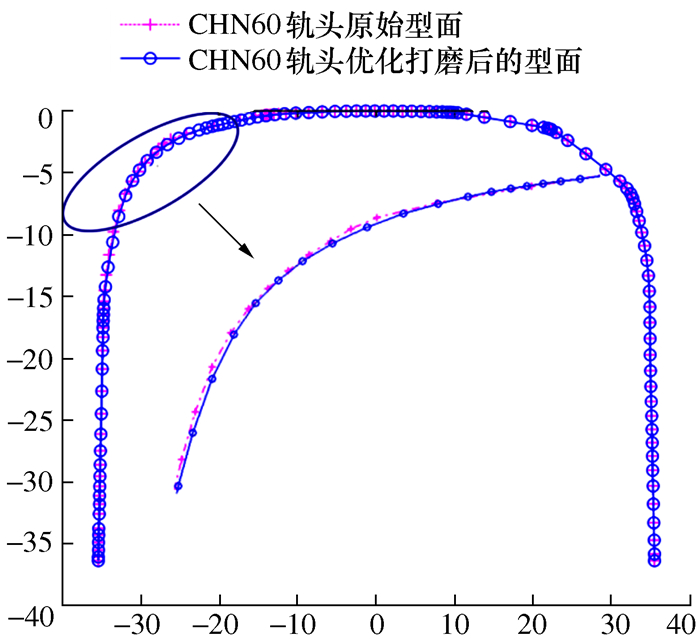
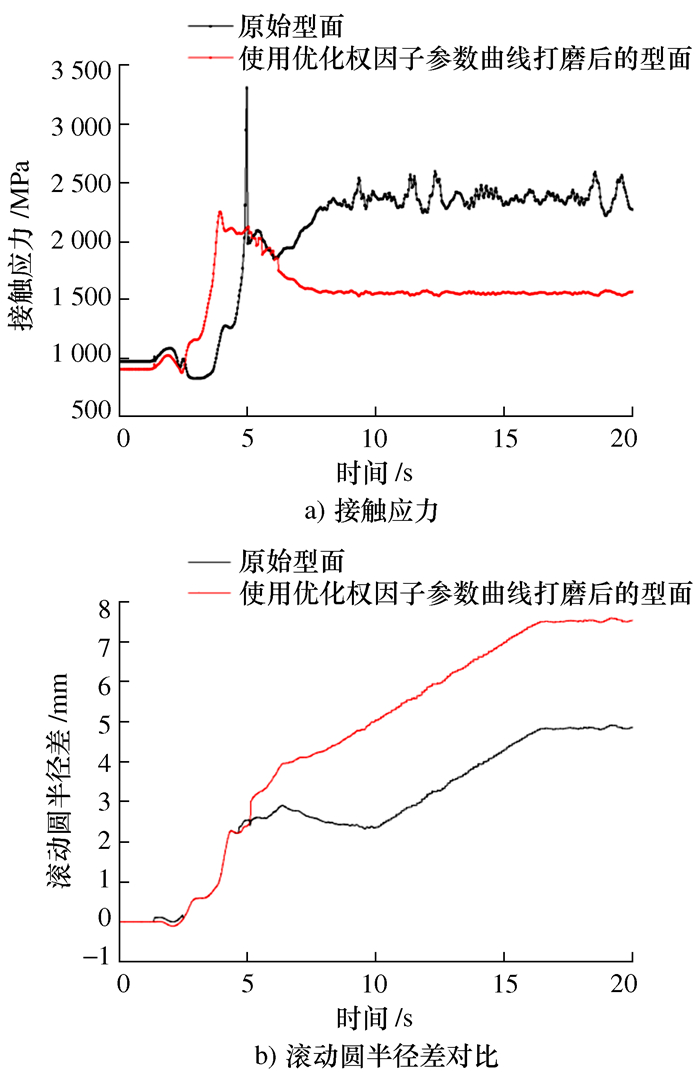
小半径曲线钢轨非对称打磨能够减少轨头侧磨,增加轮对导向能力,对非对称打磨目标型面优化,能够提高打磨质量,进一步改善轨道车辆通过小半径曲线时的轮轨接触性能和轮对导向能力。利用NURBS曲线构建了基于可调权因子的钢轨非对称打磨区域轨头曲线参数化模型,建立了以轮轨接触性能和轮对曲线通过能力Kriging代理模型为目标函数的非对称打磨目标型面多目标优化模型。采用NSGA-Ⅱ算法对可调权因子进行多目标优化,得到了优化的钢轨非对称打磨目标型面。优化结果表明,车辆的轮轨接触性能和轮对曲线通过能力得到明显改善。
小半径曲线钢轨非对称打磨能够减少轨头侧磨,增加轮对导向能力,对非对称打磨目标型面优化,能够提高打磨质量,进一步改善轨道车辆通过小半径曲线时的轮轨接触性能和轮对导向能力。利用NURBS曲线构建了基于可调权因子的钢轨非对称打磨区域轨头曲线参数化模型,建立了以轮轨接触性能和轮对曲线通过能力Kriging代理模型为目标函数的非对称打磨目标型面多目标优化模型。采用NSGA-Ⅱ算法对可调权因子进行多目标优化,得到了优化的钢轨非对称打磨目标型面。优化结果表明,车辆的轮轨接触性能和轮对曲线通过能力得到明显改善。

2021, 40(6): 955-962.
doi: 10.13433/j.cnki.1003-8728.20200165
摘要:
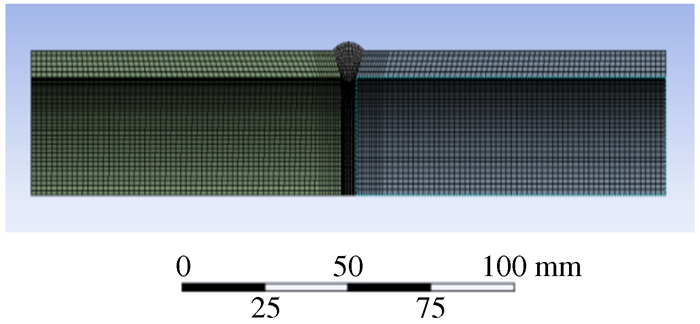
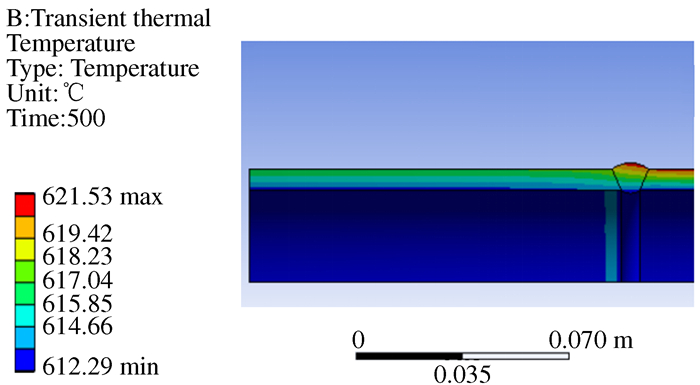
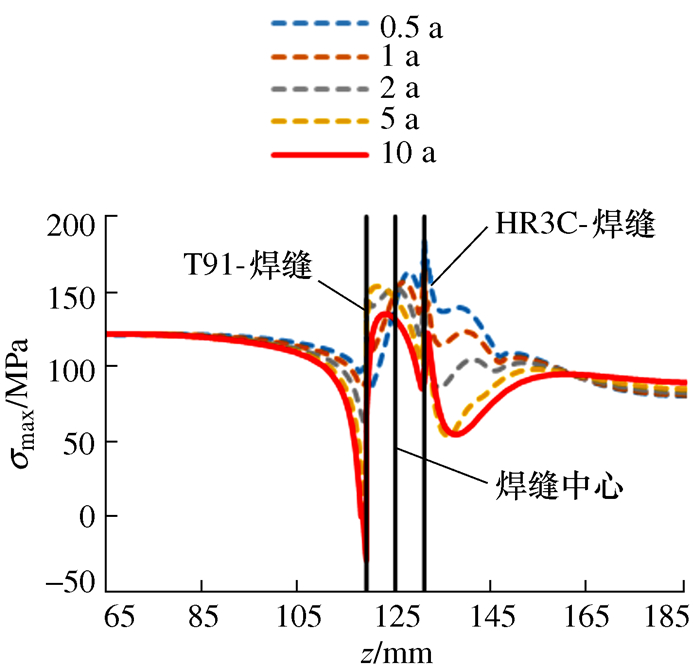
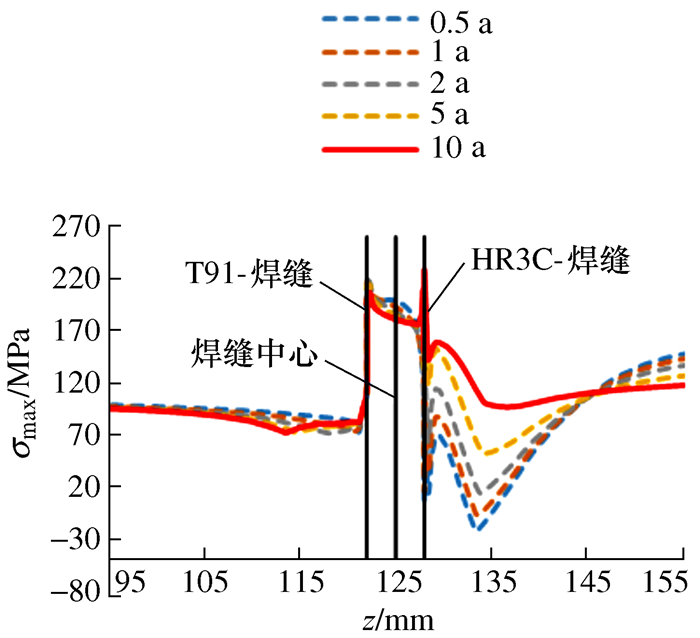
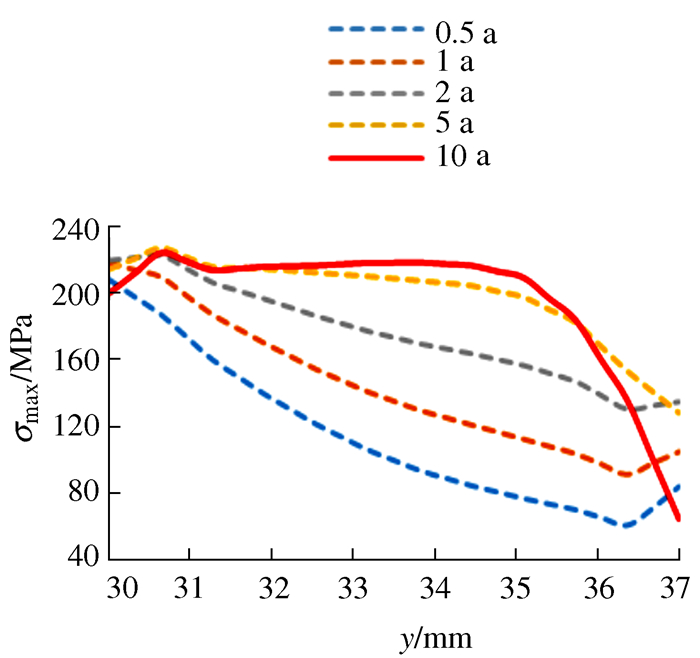
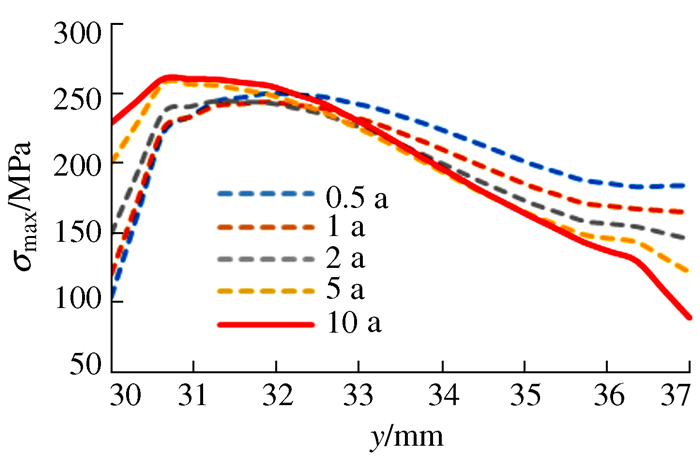
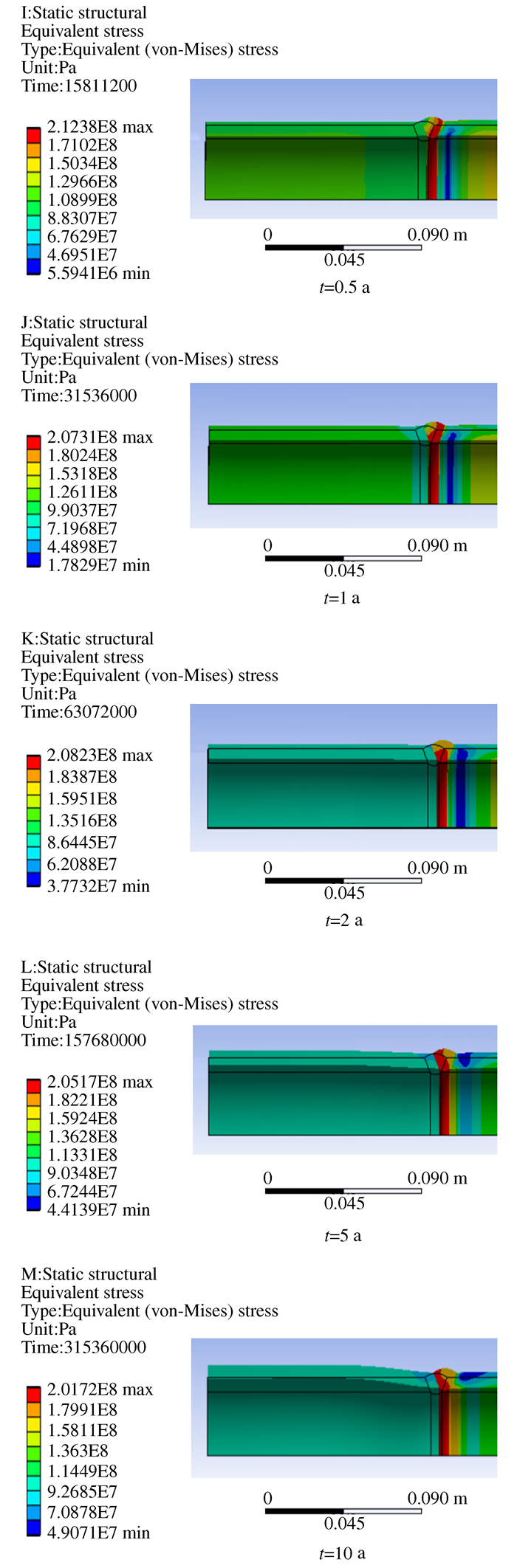
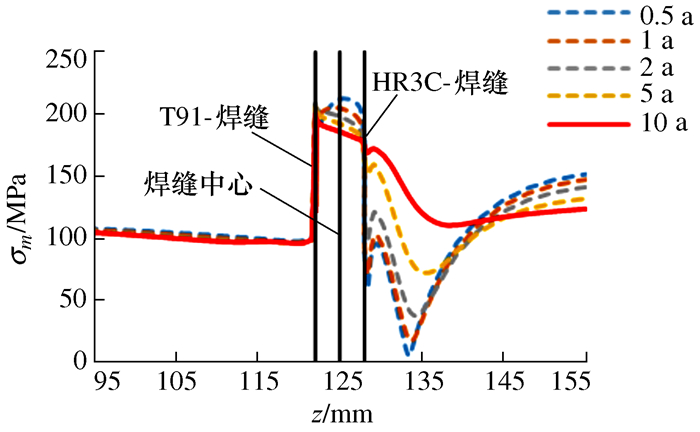
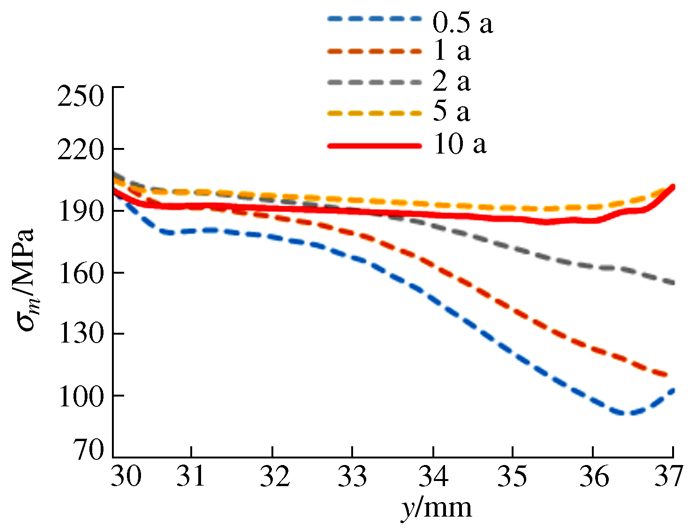
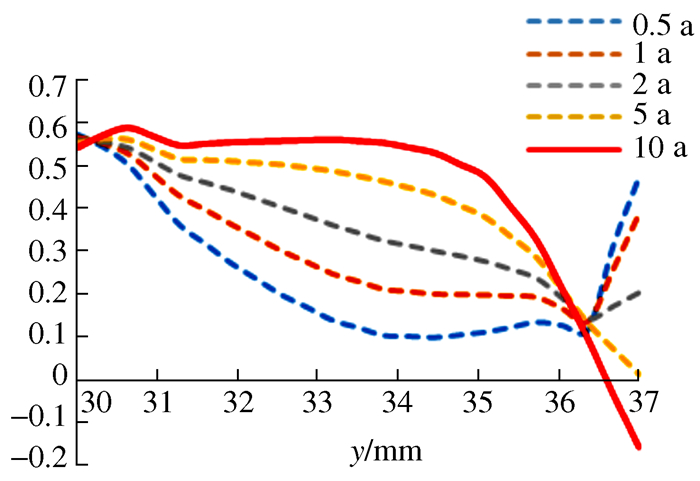
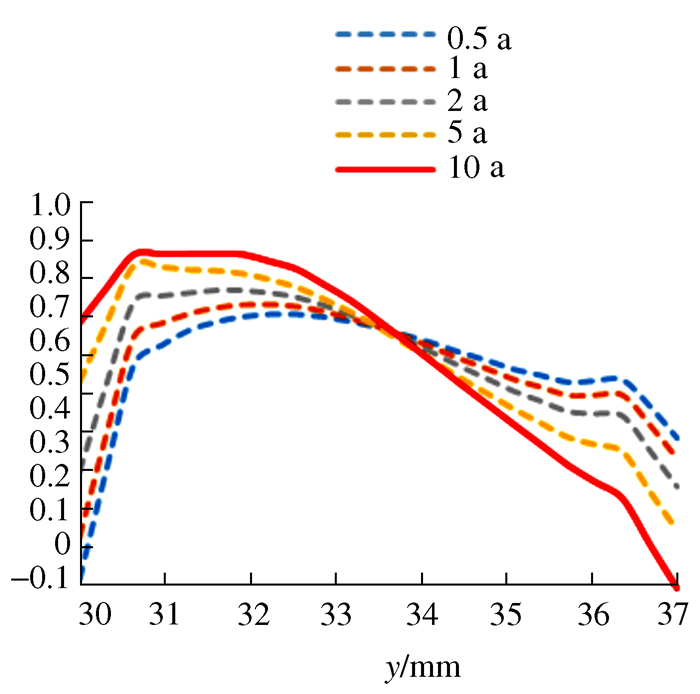
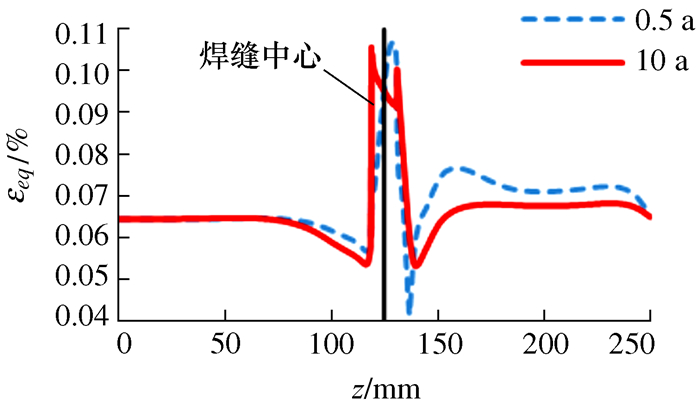
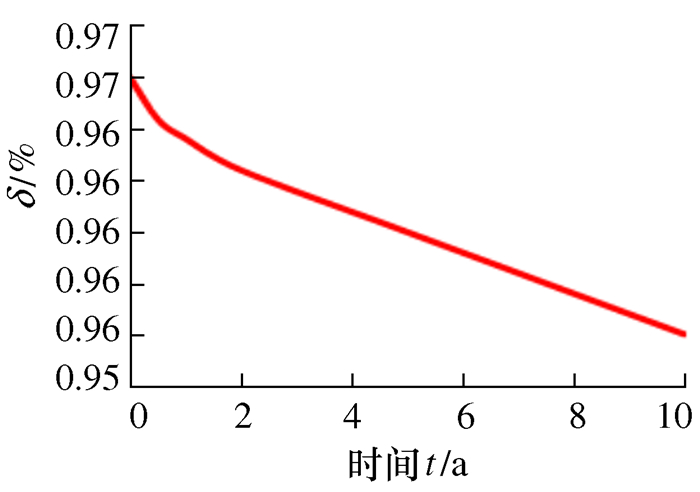
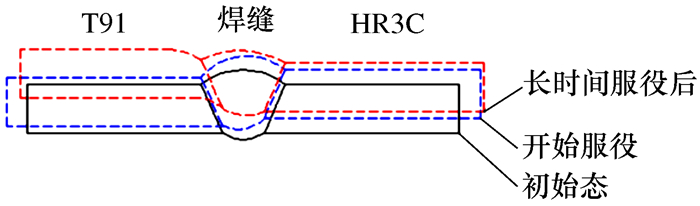
对T91-HR3C异种钢高温蒸汽管道接头的服役过程进行了数值仿真研究,在ANSYS软件内自定义了母材和焊缝区域的蠕变本构模型,分析了服役过程母材热影响区、焊缝融合线及焊缝的温度、应力及应变变化规律,确定了焊接接头在服役过程中的危险点,描述了焊接接头服役过程中的变形。结果表明T91-HR3C异种钢焊接接头在高温长时间服役过程中,应力集中发生在焊缝融合区,并且随时间推移应力集中从HR3C-焊缝界面逐渐转移至T91-焊缝界面,出现应力松弛现象,认为焊缝区域性能劣化是影响其蠕变寿命的关键所在。
对T91-HR3C异种钢高温蒸汽管道接头的服役过程进行了数值仿真研究,在ANSYS软件内自定义了母材和焊缝区域的蠕变本构模型,分析了服役过程母材热影响区、焊缝融合线及焊缝的温度、应力及应变变化规律,确定了焊接接头在服役过程中的危险点,描述了焊接接头服役过程中的变形。结果表明T91-HR3C异种钢焊接接头在高温长时间服役过程中,应力集中发生在焊缝融合区,并且随时间推移应力集中从HR3C-焊缝界面逐渐转移至T91-焊缝界面,出现应力松弛现象,认为焊缝区域性能劣化是影响其蠕变寿命的关键所在。





2021, 40(6): 963-968.
doi: 10.13433/j.cnki.1003-8728.20200175
摘要:
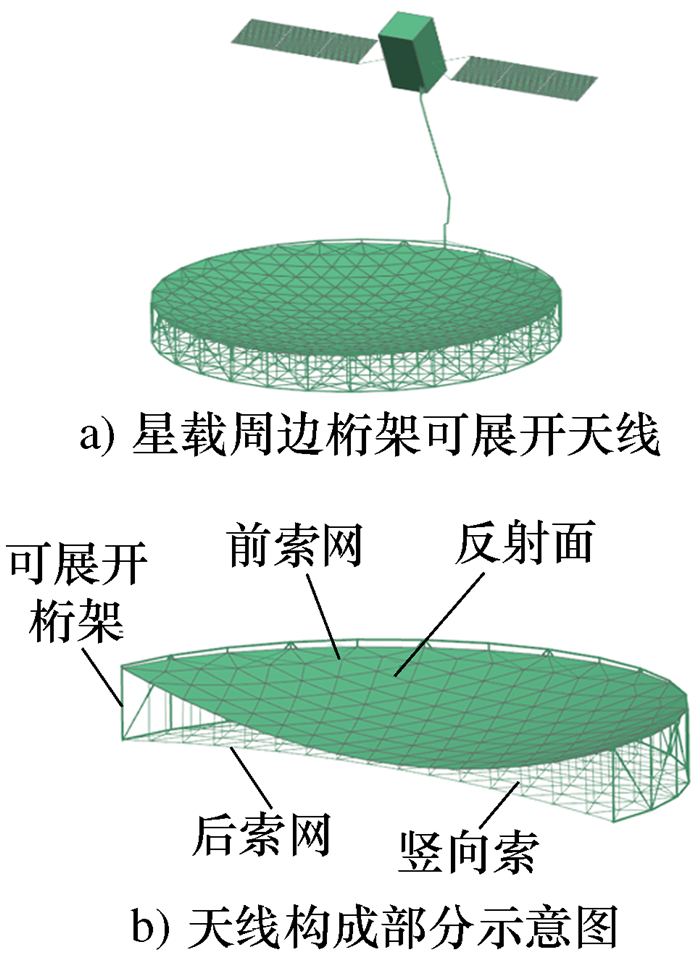
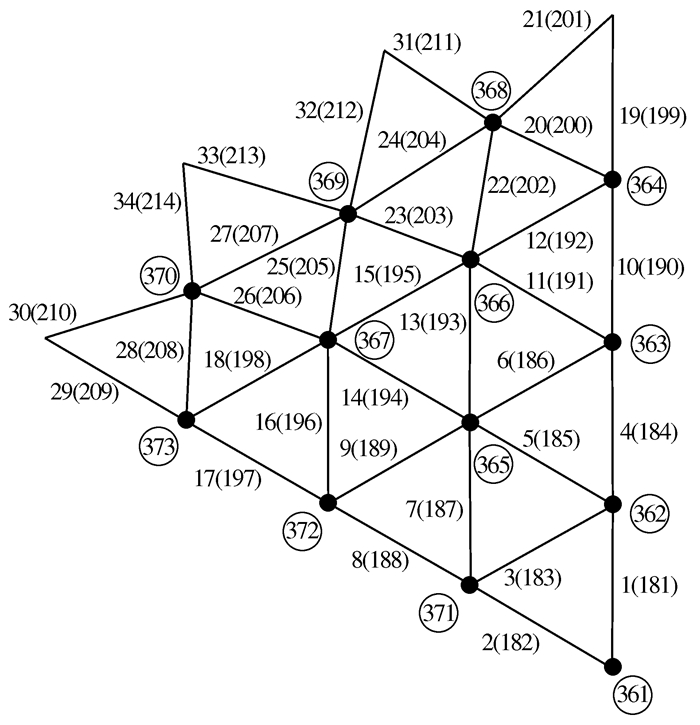
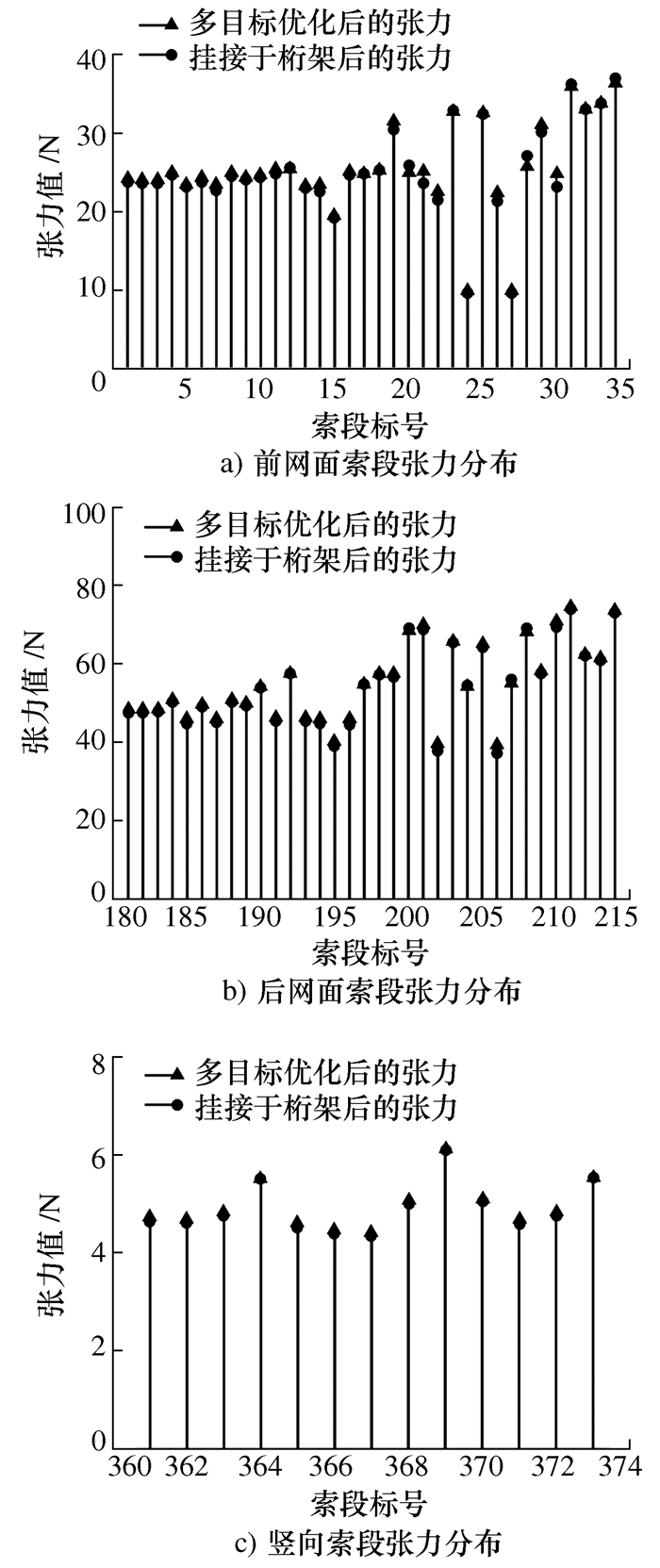
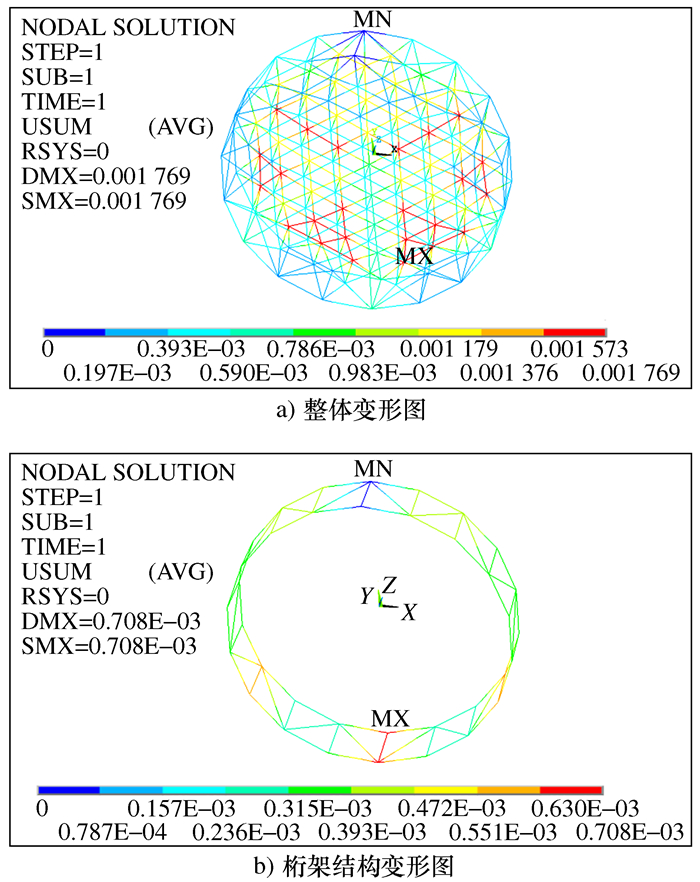
索网结构是可展开天线的重要组成部分,在桁架的支撑下,索网结构的前/后索网和竖向索阵处于张紧状态,形成满足精度要求的工作反射面。本文提出了一种可以考虑桁架变形的索网形态设计方法。首先,基于索网结构的平衡矩阵奇异值分解,约束索段张力并以索力均匀为目标,通过优化求解找到一组最优预张力。将索网挂接在桁架上,以索段的预张力和前索网节点的位置增量为设计变量,以直接与桁架连接索段的张力改变量的均方根值,索段预张力均匀性和反射面形面精度为目标,约束索段张力和节点位置增量的取值范围,建立了索网结构多目标优化模型。最后通过相应算例,验证了方法的正确性。
索网结构是可展开天线的重要组成部分,在桁架的支撑下,索网结构的前/后索网和竖向索阵处于张紧状态,形成满足精度要求的工作反射面。本文提出了一种可以考虑桁架变形的索网形态设计方法。首先,基于索网结构的平衡矩阵奇异值分解,约束索段张力并以索力均匀为目标,通过优化求解找到一组最优预张力。将索网挂接在桁架上,以索段的预张力和前索网节点的位置增量为设计变量,以直接与桁架连接索段的张力改变量的均方根值,索段预张力均匀性和反射面形面精度为目标,约束索段张力和节点位置增量的取值范围,建立了索网结构多目标优化模型。最后通过相应算例,验证了方法的正确性。




2021, 40(6): 969-978.
doi: 10.13433/j.cnki.1003-8728.20200146
摘要:
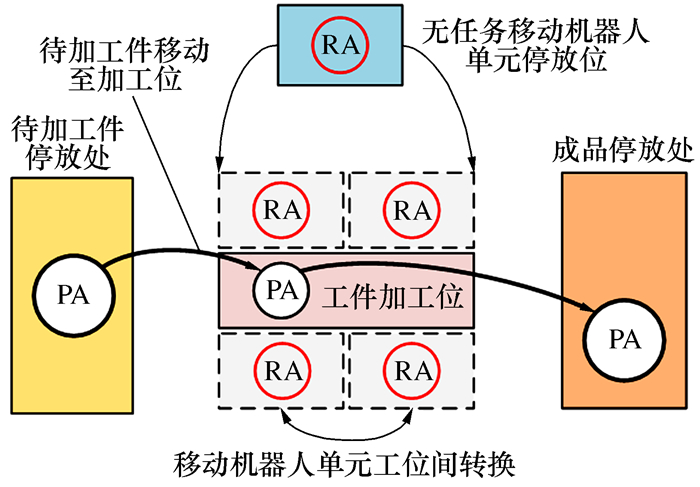
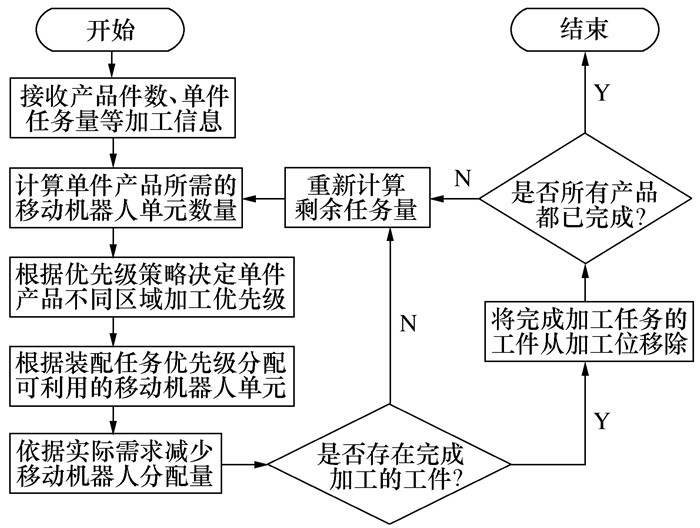
移动机器人单元精确、稳定的运动规划是其自主完成既定任务的基础和前提,也是当前多机器人制造系统应用研究所需要解决的技术难题。通过对目前已有多机器人制造系统的研究综述,介绍了运动规划算法的研究现状及其趋势,分析了各种算法优劣势,为多机器人制造系统的工业应用提供理论基础。讨论了实现多机器人制造系统工业应用所需解决的问题,并对多机器人系统及其运动规划方法的研究重点及未来的发展方向进行了展望。
移动机器人单元精确、稳定的运动规划是其自主完成既定任务的基础和前提,也是当前多机器人制造系统应用研究所需要解决的技术难题。通过对目前已有多机器人制造系统的研究综述,介绍了运动规划算法的研究现状及其趋势,分析了各种算法优劣势,为多机器人制造系统的工业应用提供理论基础。讨论了实现多机器人制造系统工业应用所需解决的问题,并对多机器人系统及其运动规划方法的研究重点及未来的发展方向进行了展望。




2021, 40(6): 979-984.
doi: 10.13433/j.cnki.1003-8728.20200123
摘要:
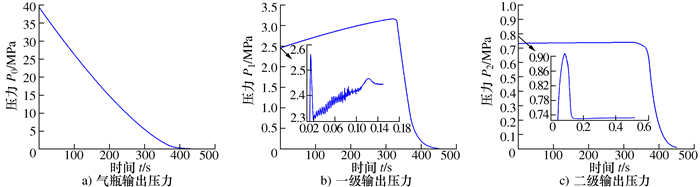
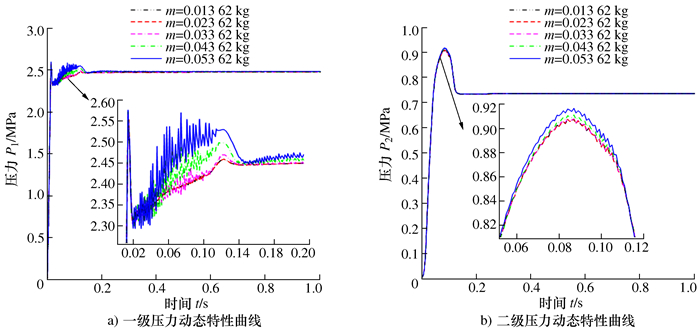
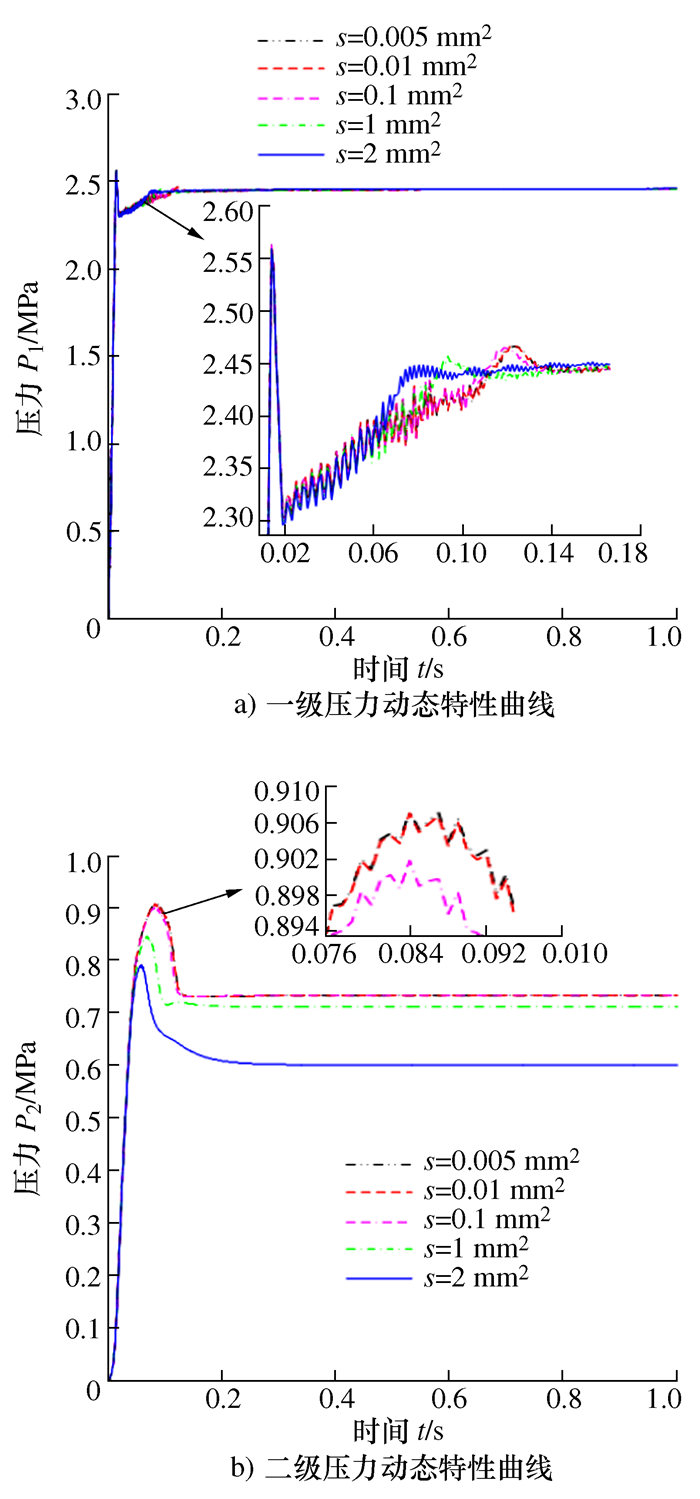
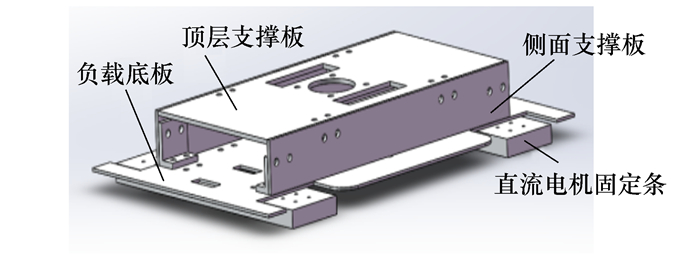
为研究某型航空推进用气动双级气体减压器的结构参数对其压力特性的影响规律,建立双级气体减压器AMESim模型,通过仿真实验获得了双级气体减压器结构参数的数值不同时输出压力动态特性曲线,并进行统计分析。研究表明:结构参数对一级输出压力特性的敏感程度依次为一级活门杆密封的泄漏面积、二级活门杆密封的泄漏面积、一级运动件质量、膜片刚度,其中一级活门杆密封的泄漏面积增大,压力超调减小、振荡程度减弱,稳定性增高。结构参数对二级输出压力特性的敏感程度依次为膜片刚度、二级活门杆密封的泄漏面积、一级运动件质量、一级活门杆密封的泄漏面积,其中膜片刚度增大,压力超调减小、稳定性提高。
为研究某型航空推进用气动双级气体减压器的结构参数对其压力特性的影响规律,建立双级气体减压器AMESim模型,通过仿真实验获得了双级气体减压器结构参数的数值不同时输出压力动态特性曲线,并进行统计分析。研究表明:结构参数对一级输出压力特性的敏感程度依次为一级活门杆密封的泄漏面积、二级活门杆密封的泄漏面积、一级运动件质量、膜片刚度,其中一级活门杆密封的泄漏面积增大,压力超调减小、振荡程度减弱,稳定性增高。结构参数对二级输出压力特性的敏感程度依次为膜片刚度、二级活门杆密封的泄漏面积、一级运动件质量、一级活门杆密封的泄漏面积,其中膜片刚度增大,压力超调减小、稳定性提高。