

海上风能具有风速高和风切变小等优势,已成为最具开发价值的绿色能源之一[1]。作为远深海风能利用的重要载体,海上漂浮式风力机是一个复杂的风浪扰动-叶片桨距控制器-结构耦合的非线性系统。在随机风浪作用下,浮动平台、塔架和叶片等结构将产生巨大的振动响应,严重影响海上漂浮式风力机的结构可靠性。因此,采用不同控制方式提高海上漂浮式风力机的抗风浪干扰能力,抑制结构的振动响应,已成为当前海上漂浮式风力机研究的重要课题。
被动控制策略是提高海上漂浮式风力机抗风浪干扰能力的一种有效途径。2011年,Lackner等[2]首次利用质量调谐阻尼器(TMD)系统降低随机风浪对风力机振动的影响,并将机舱TMD模块集成到风力机振动特性分析软件FAST中。随后,Jin、He等[3-4]采用改进的人工鱼群算法(AFSA)优化了风力机TMD参数,结果表明,最优TMD能够显著降低风力机的塔顶前后(TTFA)挠度。2020年,Zhang[5]建立了旋转叶片-TMD的2-自由度(2-DOF)动力学模型,根据频率调谐公式,得到TMD的最优阻尼比,发现TMD的最优阻尼比取决于叶轮的旋转速度。Jahangiri等[6]采用三维摆调谐质量阻尼器(3D-PTMD)和双线性冲击调谐质量阻尼器(2PTMDs)减小Spar式风力机在风浪荷载作用下的三维振动,结果证明,二者均能有效降低风力机的振动响应,且2PTMDs的行程约为3D-PTMD的50%。
近几年,采用主动控制策略减小风力机结构振动逐渐成为一个研究热点。Horacio等[7]基于主动干扰抑制(ADR)的控制方式减小风力机的变频周期性负荷扰动,发现和被动控制相比,ADR可以进一步降低周期性负荷扰动对风力机结构振动的影响。Jaime等[8]设计了一种基于叶尖挠度测量和单桨距控制的新型叶片桨距主动控制器,仿真结果证明,新型主动控制器可以降低叶轮关键部件的疲劳损伤。Fitzgerald等[9]结合漂浮式风力机的结构动力学模型和概率评估工具,研究了主动调谐质量阻尼器(ATMD)对风力机塔架可靠性的影响,分析发现,在额定风速下,ATMD在一定程度上改善了塔架的可靠性。
2015年以来,本课题组[10-12]基于拉格朗日能量法建立了Barge式风力机的结构动力学模型,并分别在机舱和平台中配置TMD,结果表明,机舱TMD和平台TMD均可有效提高结构的抗风浪干扰能力。另外,课题组研究了线性二次型调节器(LQR)对Barge式风力机振动响应的影响,发现和机舱TMD系统相比,LQR控制器的减振效果可提升20%左右[13-14]。
常规最优控制策略,如LQR控制、H控制等依赖于精确的动力学模型。海上漂浮式风力机是一个复杂的刚-柔耦合非线性系统,在随机风浪引起的风力机振动平衡位置变化、叶片桨距控制器耦合效应导致的结构参数摄动、恶劣的海洋环境引起的结构腐蚀和疲劳损伤等多因素作用下,风力机动态特性难以掌握,建立精确的动力学模型非常困难。此时,采用常规最优控制策略减小随机风浪对风力机结构振动的影响是不可行的。模糊控制具有不依赖于精确的动力学模型、鲁棒性好、抗干扰能力强等优点。因此,有必要在随机风浪扰动和叶片桨距控制器耦合作用下,进一步研究模糊控制策略对海上漂浮式风力机结构振动的影响。本文以美国NREL实验室开发的Spar型漂浮式风力机模型为基础,设计开发了自适应模糊控制器,在随机风浪扰动和叶片桨距控制器耦合作用下,研究了不同控制策略对Spar风力机结构振动的控制效果。
1 Spar式风力机刚-柔耦合非线性动力学模型Spar式风力机刚-柔耦合结构简图见图 1a),平台为刚体,塔架和叶片为柔性体,机舱为固定于塔顶的质点。风力机浮式平台通过锚线系统和海床相连,锚线系统简化为平台对应DOF的弹簧,随机风浪沿X轴作用于叶轮和浮式平台。OXYZ为惯性坐标系, OXY平面与静水面平行, Z轴竖直向上。ohijk为固定于叶轮上的旋转坐标系, 原点o固定于轮毂, i轴沿叶片1长度方向, j轴在旋转平面内垂直于i轴, k轴垂直于ohij平面。Spar式风力机的基本参数见表 1。

|
| 图 1 Spar式风力机结构简图和DOF |
| 参数 | 值 |
| 额定功率/MW | 5 |
| 切入、额定、切出风速/(m·s-1) | 3, 11.4, 25 |
| 叶片数 | 3 |
| 叶轮, 轮毂直径/m | 126, 3 |
| 叶轮质量/kg | 110 000 |
| 机舱质量/kg | 240 000 |
| 塔架质量/kg | 347 460 |
| 平台质量(含压舱物)/kg | 7 466 330 |
| 平台直径 | 锥体以上6.5 m, 锥体以下9.4 m |
| 平台长度 | SWL至锥顶4 m, 至锥底12 m, 至平台底部120 m |
| 机舱尺寸 | 24 m×8 m×6 m |
| SWL到轮毂中心的距离/m | 90 |
| SWL到塔顶的距离/m | 87.6 |
| SWL到平台重心的距离/m | 89.9 |
在浮式平台和机舱分别安装TMD系统, 如图 2所示。Mp和Mn分别为平台/机舱TMD的质量块, 则TMD系统由质量m、刚度系数k和阻尼系数c组成。另外, 在机舱中安装主动作动器fTn, 对Mn施加主动控制力u, 即可构成混合质量阻尼器(HMD)系统。

|
| 图 2 平台/机舱TMD系统示意图 |
最优TMD参数如表 2所示。
| 模块 | 质量/kg | 刚度/(N·m-1) | 阻尼/(Ns·m-1) |
| 平台TMD | 3.988×105 | 6.004×104 | 2.895×105 |
| 机舱TMD | 1.047×104 | 8.666×104 | 4.203×103 |
设Spar式风力机的广义坐标向量q为
|
(1) |
式中:上标p, t, b, T分别表示平台、塔架、叶片和TMD,上标ba分别代表 3个叶片(a=1, 2, 3);Tp, Tn表示平台TMD和机舱TMD, 下标为对应广义坐标的缩写, 详见图 1b), 本文假定q完全可测。
那么, Spar式风力机刚-柔耦合非线性动力学模型可记为

|
(2) |
式中:f(·)和g(·)为未知有界的非线性函数;f(·)代表风力机的结构参数;g(·)表示控制力的位置矩阵; fd为随机风浪扰动及结构参数摄动。
通过文献[14]的研究发现, 抑制PFPI运动不仅可以降低风力机平台的振动响应, 还可减小TTFA的低频振动, 因此, PFPI运动是表征风力机振动响应的一个关键参数。本文将PFPI作为控制对象, 通过计算PFPI运动和目标值之间的误差与误差变化率实现模糊控制。
2 传统模糊控制器设计图 3为Spar式风力机模糊控制系统。ym为目标值, 即风力机在随机风浪作用下的振动平衡位置; e和ec分别代表误差与误差变化率, 

|
| 图 3 模糊控制系统 |
模糊规则是模糊控制器的核心, 其基本形式如下

|
(3) |
式中, E,EC,U分别代表e,ec和u的模糊子集。
模糊规则直接影响模糊控制效果的优劣, 为了减小设计者主观经验对模糊规则的影响, 针对Spar式风力机复杂的工作环境, 在文献[14]中所推导的线性数学模型基础上, 以PFPI标准差最小为优化目标, 引入2个修正因子, 优选出相应的模糊规则。具体过程为:
1) 将e, ec和u的论域划分为7个模糊子集, 分别用-3(负大)、-2(负中)、-1(负小)、0(零)、1(正小)、2(正中)、3(正大)表示。
2) 引入修正因子, 利用公式(4), 得到多个输出模糊子集。

|
(4) |
式中, α1,α2表示修正因子, 取值范围为[0, 1];〈·〉表示四舍五入取整。
3) 将不同的模糊子集嵌入图 3b)中, 结合文献[14]给出的数学模型, 计算PFPI标准差。
图 4为工况1和工况3的PFPI标准差随α1,α2变化规律。可以看出, 工况1中, α1和α2分别取0.5, 0.6时, 标准差最小; 工况3中, α1,α2分别取0.5,0.4时, PFPI的标准差最小。

|
| 图 4 PFPI标准差随α1,α2的变化规律 |
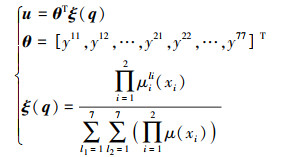
使用乘积推理机、单值模糊器和中心平均解模糊器, 得到FC为
|
(5) |
式中:y为模糊规则中U对应的模糊数;θ表示49条模糊规则中U对应的模糊数组成的向量, 共包含49个元素; l1, l2分别表示E和EC模糊子集的编号;l1=l2=1, 2, …7;x1和x2代表e和ec的取值; μ为x1和x2对应的隶属度, 隶属度采用高斯隶属函数计算; ξ(q)是一个含有49个元素的列向量, 表示每条模糊规则输入值的隶属度之积除以49条规则的隶属度之积的和。
3 自适应模糊控制器设计假设传统模糊控制器的参数θ可调, 则传统模糊控制器进化为自适应模糊控制器。因此, 本节主要根据Lyapunov第二方法设计自适应模糊控制器。
根据文献[15], 误差状态方程可写为

|
(6) |
式中: u*和

|
k=(kn…k1)T使得多项式sn+k1sn-1+…+kn的所有根均在复平面的左半开平面上。
定义最小逼近误差

|
(7) |
式中, θ*为可调参数
选择Lyapunov函数

|
(8) |
式中, P正定且满足Lyapunov方程(9);rθ为正常数。
|
(9) |
式中, Q为正定矩阵。
对V求导可得

|
(10) |
选择可调参数
|
(11) |
即可保证
由此可得AFC为
|
(12) |
本节采用2种方法验证AFC的有效性:
1) 给定方波作为目标值,研究FC和AFC作用下PFPI的跟踪效果;
2) 结构存在参数摄动fd时,研究FC和AFC作用下PFPI对方波的跟踪效果。
图 5a)为目标值变化时,FC与AFC对目标值的跟踪图,明显的,AFC能够更好更快地跟踪目标值。图 5b)为跟踪误差,由于目标值突变,导致跟踪误差出现尖峰;方波幅值为2时,FC的最小跟踪误差为0.124 3,AFC的最小跟踪误差为0.043 5。图 5c)为控制力输出,可知,当跟踪误差出现尖峰时,需要一个更大的控制力使峰值快速下降,此时,AFC的控制力输出约为FC的1.89倍;当跟踪误差趋近于0时,控制力逐渐平缓。

|
| 图 5 PFPI跟踪效果 |
图 6为结构存在参数摄动fd=3.6×108×sin(1.047 1t)时,PFPI对目标值的跟踪效果。由于存在参数摄动,前30 s的跟踪误差和控制力输出存在较大波动,随后达到一个相对平稳的跟踪过程。FC最小跟踪误差为0.126,AFC跟踪误差为0.055;AFC控制力输出峰值为FC峰值的1.92倍。

|
| 图 6 参数摄动时PFPI跟踪效果 |
由图 5和图 6可知,AFC对目标值的跟踪能力明显优于FC,因此,所设计的AFC是有效可行的。
5 基于模糊控制的海上漂浮式风力机振动抑制研究湍流风的风速和风压相对于时间是随机变化的,波浪的波高、波长、方向、位相是由不同频率的随机波叠加而成的,导致很难准确预测海上风浪工况。如果用轮毂处风速代替作用于风力机的湍流风,将波长和位相作为随机变量,那么可用随机过程理论反映海上波浪的随机特性。根据海上风力机设计标准IEC-3的规定,风速谱选择Kaimal谱,波浪谱采用Pierson-Moskowitz谱,海上漂浮式风力机常用的风浪工况基本参数见表 3。
| 工况 | 轮毂平均风速/(m·s-1) | 湍流强度 | 有效波高/m | 波谱周期/s |
| 1 | 8 | 0.20 | 2.0 | 12 |
| 2 | 12 | 0.16 | 2.6 | 13 |
| 3 | 18 | 0.15 | 4.0 | 15 |
| 4 | 24 | 0.12 | 5.6 | 18 |
通过6次300 s的海上风浪模拟,取其平均值,则海上风浪时程曲线见图 7。可以看出,风浪具有很强的随机性。工况1风速较低,均值约为8 m/s,波高峰值约为1.47 m;工况3平均风速约为18 m/s;波高峰值约为2.84 m。

|
| 图 7 海上风浪时程曲线 |
图 8为随机风浪作用下,叶片桨距角的时程曲线。由图可知,工况1的风速较低,叶片桨距控制系统停止工作,桨距角维持为0;工况2的桨距角变化范围为0°~ 10°;工况3和工况4的风速超出额定值,桨距角随风速的改变而变化,且风速越大,桨距角越大。

|
| 图 8 叶片桨距角变化时程曲线 |
图 9为在随机风浪扰动和叶片桨距控制系统耦合作用下,不同控制方式的PFPI运动PSD图。明显的,FC和AFC的PSD峰值远远低于TMD被动控制的峰值,且PSD能量主要集中在0~0.15 Hz内。和被动控制相比,工况1中,FC和AFC对PFPI运动的PSD峰值的抑制效果为34.24%, 38.97%,工况3中,2种模糊控制作用的PSD峰值分别减小了35.95%, 39.06%。

|
| 图 9 不同工况的PFPI运动PSD |
图 10为FC和AFC的控制力PSD图。同样的,控制力能量主要集中在0~0.15 Hz内;不同工况下,AFC的控制力峰值约为FC峰值的1.1倍。

|
| 图 10 不同工况的控制力PSD |
表 4为时域中不同模糊控制方式对随机风浪扰动的抑制能力,均值代表控制后平衡位置接近目标位置的程度,标准差反映振动响应的波动程度。AFC的均值抑制率小于FC,表明AFC作用下,PFPI及TTFA更接近于TMD被动控制的均值(目标位置);AFC的标准差抑制率高于FC,则AFC对PFPI运动和TTFA挠度的抑制能力更强。
| 控制方式 | 工况1抑制率/% | 工况2抑制率/% | |||||||||
| PFPI | TTFA | PFPI | TTFA | ||||||||
| 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | ||||
| FC | 2.527 | 58.136 | 0.958 | 22.670 | 1.033 | 54.492 | 0.385 | 17.367 | |||
| AFC | 2.081 | 62.405 | 0.776 | 23.088 | 1.010 | 58.436 | 0.370 | 19.011 | |||
| 控制方式 | 工况3抑制率/% | 工况4抑制率/% | |||||||||
| PFPI | TTFA | PFPI | TTFA | ||||||||
| 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | ||||
| FC | 2.122 | 51.811 | 0.886 | 22.313 | 1.321 | 44.777 | 0.381 | 13.219 | |||
| AFC | 1.713 | 56.786 | 0.792 | 24.258 | 1.092 | 53.179 | 0.285 | 17.728 | |||
本文基于Lyapunov第二方法设计了自适应模糊控制器,并研究了不同模糊控制策略抑制风力机振动响应的能力。主要结论如下:
1) 相比于传统模糊控制器,所设计的自适应模糊控制器能够更好更快地跟踪目标值;跟踪误差出现尖峰时,控制力输出达到最大。
2) 结构存在参数摄动时,前30 s的跟踪误差和控制力输出存在较大波动,随后的跟踪过程相对平稳。
3) 叶片桨距控制器耦合作用下,相对于TMD被动控制策略,自适应模糊控制器对平台俯仰运动的PSD峰值的最大抑制效果为39%左右。
4) 不同工况下,自适应模糊控制器的控制力峰值约为传统模糊控制器峰值的1.1倍,且控制力能量主要集中在0~0.15 Hz内。
| [1] | KALDELLIS J K, KAPSALI M, KATSANOU E. Renewable energy applications in Greece-what is the public attitude?[J]. Energy Policy, 2012, 42: 37-48. DOI:10.1016/j.enpol.2011.11.017 |
| [2] | LACKNER M A, ROTEA M A. Passive structural control of offshore wind turbines[J]. Wind energy, 2011, 14(3): 373-388. DOI:10.1002/we.426 |
| [3] | JIN X, XIE S, HE J, et al. Optimization of tuned mass damper parameters for floating wind turbines by using the artificial fish swarm algorithm[J]. Ocean engineering, 2018, 167: 130-141. DOI:10.1016/j.oceaneng.2018.08.031 |
| [4] | HE J, JIN X, XIE S, et al. Multi-body dynamics modeling and TMD optimization based on the improved AFSA for floating wind turbines[J]. Renewable Energy, 2019, 141: 305-321. DOI:10.1016/j.renene.2019.04.005 |
| [5] | ZHANG Z L. Optimal tuning of the tuned mass damper(TMD) for rotating wind turbine blades[J]. Engineering Structures, 2020, 207: 110209. DOI:10.1016/j.engstruct.2020.110209 |
| [6] | JAHANGIRI V, SUN C. Three-dimensional vibration control of offshore floating wind turbines using multiple tuned mass dampers[J]. Ocean Engineering, 2020, 206: 107196. DOI:10.1016/j.oceaneng.2020.107196 |
| [7] | HORACIO C E, JOHN C R, SERGIO A. Rejection of varying-frequency periodic load disturbances in wind-turbines through active disturbance rejection-based control[J]. Renewable Energy, 2019, 141: 217-235. DOI:10.1016/j.renene.2019.04.001 |
| [8] | JAIME L, WAI H L, ALBERT M U, et al. Active tip deflection control for wind turbines[J]. Renewable Energy, 2020, 149: 445-454. DOI:10.1016/j.renene.2019.12.036 |
| [9] | FITZGERALD B, SARKAR S, STAINO A. Improved reliability of wind turbine towers with active tuned mass dampers (ATMDs)[J]. Journal of Sound and Vibration, 2018, 419: 103-122. DOI:10.1016/j.jsv.2017.12.026 |
| [10] | HU Y, HE E, ZHANG Y. Optimization design of TMD for vibration suppression of offshore floating wind turbine[J]. International Journal of Plant Engineering and Management, 2015, 1(20): 13-27. |
| [11] |
贺尔铭, 张扬, 胡亚琪. 3种典型海上浮动式风机动力学特性比较分析[J]. 太阳能学报, 2015, 36(12): 2874-2881.
HE Erming, ZHANG Yang, HU Yaqi. Comparison and analysis of dynamic characteristics of three typical floating wind turbines[J]. Acta Energiae Solaris Sinica, 2015, 36(12): 2874-2881. (in Chinese) DOI:10.3969/j.issn.0254-0096.2015.12.006 |
| [12] |
杨佳佳, 贺尔铭, 胡亚琪. 浮动平台内TMD对Barge式海上浮动风机的振动抑制研究[J]. 西北工业大学学报, 2018, 36(2): 238-245.
YANG Jiajia, HE Erming, HU Yaqi. Vibration mitigation of the Barge-type offshore wind turbine with a tuned mass damper on floating platform[J]. Journal of Northwestern Polytechnical University, 2018, 36(2): 238-245. (in Chinese) DOI:10.3969/j.issn.1000-2758.2018.02.005 |
| [13] | HU Y Q, HE E M. Active structural control of a floating wind turbine with a stroke-limited hybrid mass damper[J]. Journal of Sound and Vibration, 2017, 410: 447-472. DOI:10.1016/j.jsv.2017.08.050 |
| [14] | YANG J J, HE E M. Coupled modeling and structural vibration control for floating offshore wind turbine[J]. Renewable Energy, 2020, 157: 678-694. DOI:10.1016/j.renene.2020.05.075 |
| [15] |
刘国荣, 万百五. 一类非线性MIMO系统的直接自适应模糊鲁棒控制[J]. 控制理论与应用, 2002, 19(5): 693-698.
LIU Guorong, WAN Baiwu. Direct adaptive fuzzy robust control for a class of nonlinear MIMO systems[J]. Control Theory and Applications, 2002, 19(5): 693-698. (in Chinese) DOI:10.3969/j.issn.1000-8152.2002.05.007 |
