

2. 西安航天动力研究所, 陕西 西安 710072;
3. 上海机电工程研究所, 上海 201109
当前吸气式高超声速飞行器技术研究大都关注在机体/推力一体化设计方面[1], 重点解决了飞行器总体气动与推力系统的匹配问题, 随着高超声速飞行器工程化的不断发展, 推力和控制的耦合问题愈来愈突出。高超声速飞行器的飞行速域和空域越来越大, 而且还需根据制导指令做爬升、转弯、下压攻击等机动动作, 姿态和马赫数的变化会造成进气道的不起动, 导致气动特性发生剧烈变化引起飞行器失稳。超燃冲压发动机进气道的不起动现象已经引起国内外学者的广泛关注[2]。李留刚等[3]对进气道不起动状态的信号特征及预警进行了研究。王晨曦等[4]对二元高超声速进气道的低马赫数不起动/再起动现象进行了试验研究。郭帅涛等[5]研究了攻角和马赫数对进气道起动影响的可比拟性。Kelley等[6]通过对压力信号进行处理来预测进气道不起动的发生, 并用系统辨识的方法建立了进气道不起动的发动机内部的瞬态模型。Pettinari等[7]通过飞控系统可以获得的状态量作为判断进气道不起动的依据。Mohammad等[8]通过“Blow down”改变压力来防止进气道不起动的发生。Michael等[9]计算了进气道起动和不起动时的气动数据, 分析了起动和不起动时系统的开环零极点分布, 发现两者有较大变化。综上所述, 目前对进气道不起动问题的研究多集中在对不起动状态的特性分析、识别、预测和建模上, 而针对进气道不起动时的控制问题研究较少。
本文针对进气道出现不起动时高超声速飞行器气动特性发生剧烈变化导致控制系统响应出现振荡甚至控制系统失稳的问题, 提出了一种考虑进气道不起动影响的高超声速飞行器LQR-PI控制器的模型参考自适应控制方法。当进气道处于起动状态时, 基于LQR-PI方法设计了姿态控制系统, 并以此作为进气道不起动时的参考模型; 当进气道出现不起动状态时, 在LQR-PI控制器的基础上进行增广, 即增加随被控对象参数变化而改变的自适应单元, 使得飞行器在存在进气道不起动等不确定性的情况下系统响应仍能跟踪参考模型的输出响应, 从而保证良好的控制效果。将上述方法应用于高超声速飞行器进气道不起动的控制, 通过数字仿真验证了所提方法的有效性。
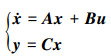
1 高超声速飞行器纵向模型高超声速飞行器纵向短周期小扰动线性化状态方程为
|
(1) |
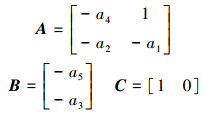
式中:状态向量x=[α ωz]T; 控制向量u=δz; 输出向量y=α; 系统的系数矩阵分别为
|
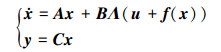
当进气道不起动时, 飞行器的气动特性发生变化, 状态方程变为
|
(2) |
式中:f(x)=ΘTΦ(x)表示进气道不起动带来的不确定性; Θ=[θ1 θ2]T表示未知的参数矩阵; Φ(x)为和状态相关的矢量; Λ表示舵效的变化。
2 LQR-PI的模型参考自适应控制增广设计 2.1 参考模型的建立首先对系统进行增广, 定义
|
(3) |
式中:ey表示系统输出跟踪误差; ycmd表示需要跟踪的指令。定义输出误差的积分为
|
(4) |
那么得到

|
(5) |
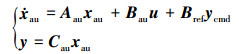
将其和(2)式合并得到

|
(6) |
式中,xau=(eyIT xT)T是增广后的状态向量。增广后系统的状态矩阵为
|
|
令Λ=I, f(x)=0得到基准增广系统
|
(7) |
再设计基准控制器对基准增广系统进行控制, 对(7)式的第一式进行微分得到

|
(8) |
令
|
(9) |
得到
|
(10) |
选取二次性能指标为
|
(11) |
式中,Q和R是选择的合适的正定对称阵, 那么最优LQR解为

|
(12) |
式中,P是黎卡提代数方程的唯一对称正定解, 即

|
(13) |
对(12)式积分得基准LQR-PI控制器为

|
(14) |
相应的基准LQR控制框图如图 1所示。

|
| 图 1 基准LQR-PI控制框图 |
将(14)式代入(7)式得到参考闭环动态模型为
|
(15) |
式中

|
(16) |
此即为设计的参考模型。
2.2 模型参考自适应控制设计当Λ≠I, f(x)≠0时, 会导致基准控制器的输出响应振荡甚至控制系统失稳, 此时设计自适应单元对基准控制器进行增广, 即总控制输入为基准控制ubI和自适应增广分量uad的和[10]

|
(17) |
将上式代入原系统(6)式, 并利用(16)式, 得
|
(18) |
令
|
(19) |
重新定义矢量

|
(20) |
未知参数的增广矩阵为

|
(21) |
则(18)式可写为

|
(22) |
选择uad用于抵消不确定性ΘTΦ(ubI, x), 即
|
(23) |
式中,
状态跟踪误差
|
(24) |
自适应律选为

|
(25) |
式中:

|
(26) |
的唯一对称正定解。式中Qref是所选择的合适的对称正定矩阵。
矩阵分块
|
(27) |
式中,(Γu, ΓΘ)表示对不确定性的自适应速率, 它们分别对应于xau和Φ(x), 则(25)式变为
|
(28) |
总控制输入

|
(29) |
基准PI控制的自适应增广框图如图 2所示。

|
| 图 2 基准PI控制的自适应增广框图 |
其中, 
将(23)式代入(22)式得

|
(30) |
令参数估计误差的矩阵为
|
(31) |
跟踪误差动态由增广开环系统(30)式减去参考系统(15)式得到, 即

|
(32) |
选择二次李雅普诺夫候选函数为

|
(33) |
对上式求时间的微分得
|
(34) |
对(34)式应用恒等式
|
(35) |
得到
|
(36) |
因为
|
(37) |
则
|
(38) |
这证明了(e, ΔΘ)的一致最终有界性。
3 仿真与分析为了验证上述考虑进气道不起动的LQR-PI控制器的模型参考自适应控制增广方法的有效性, 将其应用于某一吸气式高超声速飞行器, 并进行仿真验证。
仿真条件设置为:高度26 km, 马赫数6, 攻角初值0°, 角速度初值0°/s。仿真时不起动模型的不确定参数设置为Θ=[θ1 θ2]T=[0.1a2-0.1a1]T, Φ(x)=[α ωz]T, Λ=0.5, 即动力学系数a2的绝对值增大100%, a3, a5减小50%, a4减小13%, a1减小97%。起动和不起动情况下动力学系数的具体数值见表 1。攻角指令为幅值1°的阶跃信号。
| 进气道状态 | 动力学系数 | ||||
| a1 | a2 | a3 | a4 | a5 | |
| 起动状态 | 0.116 | -17.839 | 19.464 | 0.073 | 0.011 |
| 不起动状态 | 0.004 | -35.678 | 9.732 | 0.064 | 0.006 |
为证明所提方法的有效性, 将其和LQR-PI控制做以对比。在0~5 s时间段内, 进气道处于起动状态, 控制器为LQR-PI基准控制; 5 s后进气道变为不起动状态, 仿真模型中加入摄动, 控制器仍采用LQR-PI基准控制的仿真结果如图 3至5所示, 控制器采用LQR-PI基准控制加模型参考自适应控制的仿真结果如图 6至11所示。

|
| 图 3 攻角曲线 |

|
| 图 4 角速度曲线 |

|
| 图 5 舵偏和舵偏角速度曲线 |

|
| 图 6 攻角曲线 |

|
| 图 7 角速度曲线 |

|
| 图 8 舵偏和舵偏角速度曲线 |

|
| 图 9 估计参数θ1曲线 |

|
| 图 10 估计参数θ2曲线 |

|
| 图 11 估计参数Ku曲线 |
从图 3至5可以看出, 在0~5 s进气道处于起动状态时, 基准LQR-PI控制能很好地跟踪指令曲线, 攻角的上升时间0.8 s; 第5秒进气道变为不起动状态后, 在基准LQR-PI控制下攻角、角速度和舵偏角出现发散趋势。
从图 6至8可以看出, 第5秒进气道变为不起动状态时, 攻角产生了0.045°的变化, 角速度产生了0.9°/s的变化, 在基准LQR-PI加自适应控制器的作用下攻角和角速度能快速收敛到稳态值, 基准的LQR-PI控制的舵偏只产生了很小的波动, 而自适应控制的舵偏从0°变为4.5°且很快稳定在2.7°, 总控制舵偏从0.92°变为5.66°且很快稳定在3.66°, 基准LQR-PI控制的舵偏角速度只有0.04°/s的波动, 自适应控制和总控制的舵偏角速度只有不到0.25°/s的波动。参数θ1, θ2和Ku的估计值收敛, 如图 9至11所示。从仿真结果可以看出LQR-PI控制器的模型参考自适应控制增广方法相比于LQR-PI控制具有较强的鲁棒性, 对参数不确定性具有很好的控制效果。
4 结论本文提出的考虑进气道不起动的LQR-PI控制器的模型参考自适应控制增广方法对吸气式高超声速飞行器进气道不起动引起的模型参数摄动有很好的控制性能, 系统在进气道出现不起动时能够快速跟踪控制指令, 且稳态误差趋于零, 可以使得闭环系统在进气道不起动的情况下快速稳定姿态, 为进气道再起动提供条件。
| [1] |
罗金玲. 高超声速飞行器机体/推进一体化设计的启示[J]. 航空学报, 2015, 36(1): 39-48.
LUO Jinling. Inspiration of Hypersonic Vehicle with Airframe/Propulsion Integrated Design[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(1): 39-48. (in Chinese) |
| [2] |
谭慧俊, 卜焕先, 张起帆, 等. 高超声速进气道不起动问题的研究进展[J]. 南京航空航天大学学报, 2014, 46(4): 501-508.
TAN Huijun, BU Huanxian, ZHANG Qifan, et al. Review of Hypersonic Inlet Unstart Phenomenon[J]. Journal of Nanjing University of Aeronautics&Astronautics, 2014, 46(4): 501-508. (in Chinese) DOI:10.3969/j.issn.1005-2615.2014.04.003 |
| [3] |
李留刚, 谭慧俊, 孙姝, 等. 二元高超声速进气道不起动状态的信号特征及预警[J]. 航空学报, 2010, 31(12): 2324-2331.
LI Liugang, TAN Huijun, SUN Shu, et al. Signal Characteristics and Prediction of Unstarting Process for Two-Dimensional Hypersonic Inlet[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(12): 2324-2331. (in Chinese) |
| [4] |
王晨曦, 谭慧俊, 张启帆, 等. 高超声速进气道低马赫数不起动和再起动试验[J]. 航空学报, 2017, 38(11): 121146.
WANG Chenxi, TAN Huijun, ZHANG Qifan, et al. Test of Low Mach Number Unstart and Restart Process of Hypersonic Inlet[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(11): 121146. (in Chinese) |
| [5] |
郭帅涛, 李祝飞, 高文智, 等. 攻角与马赫数对进气道起动特性的可比拟性[J]. 推进技术, 2017, 38(5): 983-991.
GUO Shuaitao, LI Zhufei, GAO Wenzhi, et al. Analogy between Effects of Attack Angle and Mach Number on Inlet Starting[J]. Journal of Propusion Technology, 2017, 38(5): 983-991. (in Chinese) |
| [6] | HUTCHINS E, AKELLA R, CLEMENS T. Detection and Transient Dynamics Modeling of Experimental Hypersonic Inlet Unstart[C]//AIAA Flow Control Conference, 2012 |
| [7] | PETTINARI S, CORRADINI M L, SERRANI A. Detection of Scramjet Unstart in a Hypersonic Vehicle Model[C]//American Control Conference, 2012 |
| [8] | SHADAB M A, BAIG M F. Investigation and Control of Unstart Phenomenon in Scramjets[C]//AIAA International Space Planes and Hypersonic System and Technologies Conference, 2017 |
| [9] | BOLENDER M A, WILKIN H, JACOBSEN L, et al. Flight Dynamics of a Hypersonic Vehicle during Inlet Un-Start[C]//AIAA International Space Planes and Hypersonic System and Technologies Conference, 2009 |
| [10] | LAVRETSKY E, WISE K A. Robust and Adaptive Control with Aerospace Applications[M]. London: Springer, 2013. |
2. Xi'an Aerospace Propulsion Institute, Xi'an 710072, China;
3. Shanghai Electro-Mechanical Engineering Institute, Shanghai 201109, China
