

2. 西北工业大学 航天学院, 陕西 西安 710072;
3. 北京动力机械研究所, 北京 100074
航空发动机是一个高度复杂的非线性被控对象, 其工作过程是极其复杂的气动热力过程, 并且这一过程随着其环境条件和工作状态的变化将发生很大变化。因此要求航空发动机控制系统在复杂热力循环参数下具有良好的鲁棒性能[1-2]。传统的增益调度技术的调参过程极其复杂, 仅是从工程应用的角度考虑使用调度参数建立了局部线性控制器之间的关系, 无法理论上保证系统在设计包线内的稳态特性, 并且对控制系统不确定性的鲁棒性较差[3-4]。线性变参数(linear parameter varying, LPV)控制是近年来受到大量学者广泛关注的一种新颖的增益调度技术, 系统的非线性特性或者动态特性依赖于实时可测的外部参数, 可对其采用线性控制理论的方法设计依赖于调度参数的变增益控制器, 理论上保证了系统在整个参数轨迹上的稳定性和鲁棒性能, 进而克服了传统增益调度控制器设计中的插值问题和稳定性问题[3-6]。
Oliveira等针对一类不确定LTI系统, 将其转化为多胞型LPV系统, 基于参数依赖Lyapunov理论并结合线性矩阵不等式(linear matrix inequality, LMI)方法得到了保守性较低的H∞性能指标估计方法[7]; 邵朋院针对大尺度变参数无人机的飞行控制问题, 提出了一种LPV系统鲁棒变增益PID控制方法, 解决了变形无人机暂态控制问题中存在的大尺度变参数问题[8]。在发动机控制方面, Reberga等针对涡扇发动机的LPV建模方法进行了总结研究[9]; Zhen等针对涡扇发动机LPV建模过程中调度参数的选择问题进行研究, 并采用发动机非线性模型进行仿真验证[10]; Bruzelius等针对高涵道比涡扇发动机LPV模型, 基于参数依赖Lyapunov函数和多凸性概念, 设计了变增益控制器[11]; 吴斌等针对发动机全包线内多控制器切换问题, 提出了一种基于状态重置的切换多胞LPV控制方法, 并将其应用于涡扇发动机全包线中间状态控制仿真中[12]。目前广泛采用有界实引理和二次Lyapunov函数进行LPV控制器的设计, 以保证系统的稳定性和鲁棒性, 但该方法需要在整个参数轨迹上求解LMI, 这将增加计算的复杂性。此外采用鲁棒H∞控制虽然能够保证系统稳定并具有一定的鲁棒性, 但是它并不能处理系统的瞬时特性, 为此需将闭环系统的极点配置在左半平面上指定位置内以保证系统具有一定的稳定性和动态性能[13-14]。
针对上述问题, 本文提出了一种基于区域极点配置的航空发动机多变量鲁棒变增益LPV控制方法。通过雅克比线性化方法建立多变量航空发动机多项式LPV模型[15], 使用网格法对整个参数轨迹进行合理划分, 并将闭环系统极点配置到复平面上的指定位置以获得期望的动态响应特性, 通过引入LMI方法, LPV系统的区域极点配置问题和鲁棒H∞控制问题可描述为包含LMI约束的凸优化问题, 进而, 可通过求解一组LMI确保所设计的多目标控制器既满足鲁棒H∞性能指标又具有良好的动态性能[16]。最后将其应用于某型涡扇发动机模型中进行了仿真验证。
1 问题描述航空发动机在飞行包线内气动热力循环参数复杂且变化剧烈, 具有多处供油与几何可调作动装置, 控制变量较多, 并且发动机输入与输出之间存在严重耦合特性。目前, 航空发动机线性模型的线性控制器和传统变增益控制方法不能很好地满足系统参数大范围变化要求, 只能从工程应用的角度出发保证控制系统在设计点上具有一定的鲁棒性能和稳定性, 无法从理论上保证非设计点上的稳定性和控制性能, 设计者只能事后依赖于大量计算和仿真评价控制系统整体控制性能。
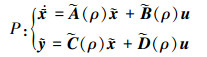
为克服上述缺点, 本文针对以下形式的发动机多项式LPV模型P设计依赖于参数ρ的多变量控制律u=K(ρ)
|
(1) |
式中, ρ∈Rk为实时可测的调度参数, 一般选择相对低压转子转速nL作为调度参数以反映发动机实际工作状态; 
|
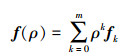
(2) |
式中, fk(k=0, 1, …, m)为相应维数的常值矩阵, 且ρ∈[ρminρmax]。
针对航空发动机这一强非线性被控对象, 上述LPV鲁棒控制方法依赖实时可测外部参数ρ, 可实时反映发动机系统动态特性和非线性特性, 根据建立的LPV控制器通过参数ρ可实时改变系统增益, 并且Lyapunov理论的应用保证了系统在整个包线内的全局稳定性。此外, 线性系统的瞬时响应与其极点位置密切相关, 为保证系统具有一定的稳态和动态特性, 需将闭环系统的极点配置在左半平面的适当区域内。为此, 本文开展了基于区域极点配置的鲁棒LPV控制方法研究, 以期改进发动机控制系统的稳定性、动态性能指标和鲁棒性。
2 LPV鲁棒控制方法 2.1 LPV控制系统方案设计本文研究目标:针对系统(1), 基于图 1所示控制系统结构, 设计依赖于参数ρ的多变量控制律u=K(ρ)

|
| 图 1 控制系统结构框图 |

|
| 图 2 闭环系统极点配置区域 |
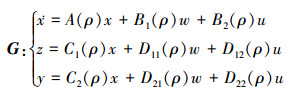
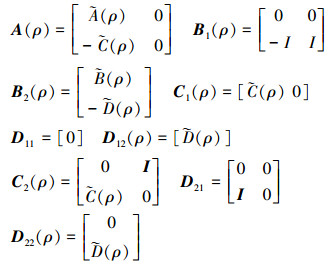
图 1中, w为增广被控对象的控制期望, 其中d为量测干扰, r为参考输入; u为控制作用量; 设



|
(3) |
式中
|
I代表适当维数的单位矩阵。
根据图 1所示控制系统结构, 多变量全阶控制器K(ρ)可表示为
|
(4) |
式中, 
|
(5) |
|
(6) |
引理1[17] 给定2个LMI区域D1和D2, 矩阵A(ρ)同时是D1-稳定和D2-稳定的充分必要条件是存在一个对称正定矩阵X(ρ)∈Rn×n, 使得

|
(7) |
考虑图 2所示区域S(α, r, θ), 可将其作为具有一个圆锥扇形S(0, 0, θ)、一个具有α-稳定度的半平面区域Dα和一个圆盘D(r, 0)这3个LMI区域的交集, 以保证系统的调节时间、最大超调量等动态过程指标满足控制系统要求, 因此根据引理1, 矩阵A(ρ)的所有特征值均在区域S(α, r, θ)中的充分必要条件是存在一个对称正定矩阵X1(ρ), 使得

|
(8) |
|
(9) |

|
(10) |
引理2[17] 系统(5)具有H∞性能指标γ的充要条件是:存在一个对称正定矩阵X2(ρ), 使得对所有参数ρ均满足下列LMI

|
(11) |
式中,*表示由矩阵对称性所得矩阵块。
2.3 基于网格法的LPV鲁棒控制器设计与求解针对系统(1)设计控制器(4), 使得闭环系统(5)同时满足以上给定的闭环区域极点约束和H∞性能指标γ的多目标控制问题可以通过求解具有变量X1(ρ), X2(ρ)和K(ρ)的LMI(8), (9), (10), (11)来解决。根据引理2, 通过引入一个共同Lyapunov矩阵

|
(12) |
则上述多目标控制问题可通过建立和求解以下凸优化问题解决:
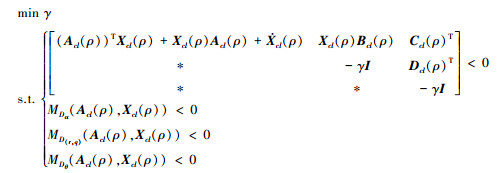
|
(13) |
式中,α, θ, r是设计者给定参数。
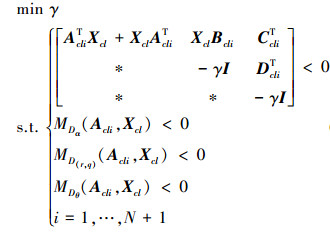
由于参数化Lyapunov函数的引入, LPV系统性能分析问题转化为参数化LMI约束下的非凸优化问题并需求解无限维LMI, 求解困难。为解决上述问题, 本文采用网格法对整个系统参数轨迹进行划分, 并在网格点上分析系统相关性能, 以作为整个系统的性能分析结果, 进而转化为有限维LMI进行计算, (13)式可变换如下
|
(14) |
(14) 式中矩阵变量Xcl和控制器参数矩阵Aki, Bki, Cki, Dki呈现非线性关系, 为此, 本文采用变量替换法将上述非线性矩阵不等式转化为LMI, 以求解控制器Ki。
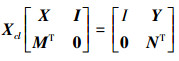
首先将矩阵Xcl及其逆矩阵进行如下分块
|
(15) |
式中,X, Y∈Rn×n是对称矩阵。由
|
(16) |
可得
|
(17) |
定义
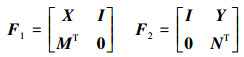
|
(18) |
则通过矩阵运算可得

|
(19) |

|
(20) |

|
(21) |
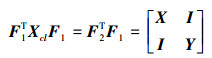
|
(22) |
根据(19)至(22)式, 定义如下变量替换公式
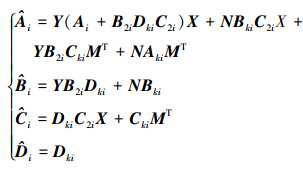
|
(23) |
对不等式(14)第一个矩阵分别左乘diag{F1T, I, I}和右乘diag{F1, I, I}, 转化为

|
(24) |
对不等式(14)第二个矩阵分别左乘矩阵F1T和右乘矩阵F1, 对不等式(14)第3个、第4个矩阵分别左乘diag{F1T, F1T}和右乘diag{F1, F1}, 转化为

|
(25) |
|
(26) |
|
(27) |
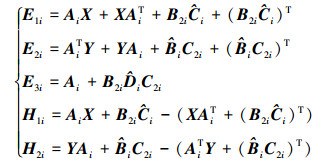
式中
|
(28) |
根据恒等式Xcl-1Xcl=I, 可得

|
(29) |
解得矩阵X和Y后, 通过矩阵I-XY的奇异值分解得到满秩矩阵M和N。由正定矩阵Xcl>0可得
|
(30) |
由于(24)至(27)式、(30)式是关于矩阵变量
|
(31) |
式中, 各顶点凸分解系数αi基于变参数ρ的几何距离调度策略进行求解, 参见文献[18]。
综上所述, 基于区域极点配置的LPV鲁棒H∞全阶控制器设计如下:
1) 针对多变量LPV模型(1), 对调度参数ρ的参数轨迹进行合理划分;
2) 将控制器K(ρ)的设计问题转化为(13)描述的凸优化问题, 解得矩阵
3) 对矩阵I-XY的奇异值分解求解满秩矩阵M和N;
4) 根据(31)式求解控制器的参数矩阵Ak(ρ), Bk(ρ), Ck(ρ)和Dk(ρ);
5) 根据(4)式建立多变量鲁棒LPV控制器。
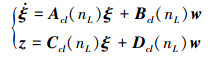
3 航空发动机LPV模型建立及其控制器设计 3.1 航空发动机LPV模型及其多项式表示针对某型涡扇发动机模型, 在飞行高度和马赫数一定的条件下, 选择发动机相对低压转子转速nL作为调度参数, 当nL∈[0.8 0.98]时均匀选择10个发动机精确线性模型, 基于雅克比线性化方法, 对各系数矩阵元素采用不分段的多项式拟合方法建立3阶多项式发动机LPV模型[19]
|
(32) |
式中, 以高、低压转子转速的相对变化量作为状态变量
网格划分的疏密程度是实现发动机LPV控制的关键, 网格划分过多会增加运算的复杂程度, 划分过少可能导致控制效果较差, 经过运算比较, 本文对调度参数nL的参数轨迹进行五等分, 在每个网格点上考虑发动机LPV模型的性能, 同时考虑燃油计量装置和尾喷口作动筒为惯性环节, 其时间常数分别为0.05 s和0.1 s, 其传递函数可统一表示为

|
(33) |
取

|
(34) |
式中, 

|
(35) |
在给定发动机多项式LPV模型(32)的基础上, 设计如图 1所示发动机控制系统结构, 要求闭环系统极点配置到α=1.3, 
|
式中
|
本文针对飞行包线内不同的飞行条件:H=5 km, Ma=0.95;H=10 km, Ma=0.9;H=12 km, Ma=0.95, 根据设计的LPV鲁棒控制器与在稳态条件下的发动机非线性模型、线性模型簇分别组成闭环控制系统进行仿真, 验证控制系统的鲁棒性能, 稳定性, 不同控制通道的动、静态性能和通道间的耦合影响, 仿真过程中引入的噪声皆为互不相关的零均值高斯白噪声, 仿真结果如图 3至图 7所示。

|
| 图 3 区域极点配置应用前后仿真结果对比 |

|
| 图 4 rnH=1, rT45=0时nH和T45的阶跃响应 |

|
| 图 5 rT45=1, rnH=0时T45和nH的阶跃响应 |

|
| 图 6 不同飞行条件下ΔnH的跟踪响应 |

|
| 图 7 不同飞行条件下ΔT45的跟踪响应 |
图 3针对飞行条件:H=10 km, Ma=0.9, nL=0.81下对应的发动机线性模型, 当参考输入rT45=0, rnH=1时, 采用基于区域极点配置方法后多变量鲁棒LPV控制系统ΔnH的阶跃响应结果对比。
由图 3可见, 未加入区域极点配置的LPV鲁棒控制系统, 阶跃响应的调节时间为2.97 s; 基于区域极点配置的LPV鲁棒控制系统, 阶跃响应的调节时间为1.48 s, 由此可见, 该方法具有较好的动态响应特性。
图 4至图 5针对发动机精确线性模型簇进行验证:图 4表示当参考输入rT45=0, rnH=1时, 多变量控制系统ΔnH和ΔT45的阶跃响应和解耦效果; 图 5表示当参考输入rT45=1, rnH=0时, 多变量控制系统ΔnH和ΔT45的阶跃响应和解耦效果。
由图 4至图 5可见, 控制系统具有非常满意的动态响应和解耦结果, 不同的控制通道之间耦合影响小, 且衰减速度较快, 衰减时间小于3 s。
图 6至图 7针对发动机非线性模型进行验证:引入高斯白噪声的信噪比为(70, 70), 图 6表示当参考输入rT45=0, rnH变化时, 多变量控制系统ΔnH的指令跟踪结果; 图 7表示当参考输入rnH=0, rT45变化时, 多变量控制系统ΔT45的指令跟踪结果。
由图 6至图 7可见, 在不同飞行状态下, 本文所设计的多变量LPV鲁棒控制器, 在可变参数nL的调度下, 随着参考输入的变化, 发动机的响应能够快速跟踪控制指令的变化, 保证了发动机在稳态工作点下控制系统的稳定性, 同时保证控制系统具有良好的动态性能。系统阶跃响应的调节时间不大于1.6 s, 超调小于1%, 对控制期望的稳态跟踪误差小于0.1%, 同时控制系统对测量干扰具有很好的抑制作用。
综上所述, 本文所设计的多变量LPV鲁棒控制器较好地满足了航空发动机控制系统的技术指标设计要求, 保证了在较大的参数变化范围内, 发动机控制系统具有良好的鲁棒性能和动态特性。
5 结论采用基于区域极点配置的多变量鲁棒LPV控制方法对航空发动机多变量鲁棒增益调度问题进行了研究, 得到以下结论:
1) 阐明了传统变增益控制方法的不足, 建立了能够反映发动机非线性特性和实时性的LPV模型, 并设计了基于区域极点配置的多变量鲁棒LPV控制系统, 理论上保证了系统的全局稳定性;
2) 对调度参数nL的轨迹进行五等分, 利用LMI技术针对发动机线性系统设计了满足闭环极点配置要求的输出反馈控制器, 将闭环系统极点配置于左半平面恰当区域内, 以获得期望的动态响应特性, 保证了发动机这一强非线性系统始终具有很高的动态性能和稳态性能;
3) 在某型涡扇发动机模型的不同飞行条件下, 分别以稳态条件下的发动机非线性模型、线性模型簇为对象进行仿真验证。仿真结果表明:存在扰动输入情况下, 系统阶跃响应调节时间不大于1.6 s, 超调小于1%, 对控制期望的稳态跟踪误差小于0.1%, 航空发动机LPV控制系统具有很强的抗干扰能力, 同时具有良好的稳态和动态性能, 符合发动机控制系统技术指标要求。
| [1] | RICHTER H. Advanced Control of Turbofan Engines[M]. New York: Springer, 2011. |
| [2] |
樊思齐. 航空发动机控制[M]. 西安: 西北工业大学出版社, 2008: 24-27.
FAN Siqi. Aeroengine Control[M]. Xi'an: Northwestern Polytechnical University Press, 2008: 24-27. (in Chinese) |
| [3] | CHUMALEE S, JAMES F WHIDBORNE. Gain-Scheduled H∞ Control via Parameter-Dependent Lyapunov Functions[J]. International Journal of Systems Science, 2015, 46(1): 125-138. |
| [4] |
傅彩芬, 谭文, 刘吉臻. 基于回路成形的鲁棒增益调度控制器设计[J]. 信息与控制, 2005, 34(2): 152-156.
FU Caifen, TAN Wen, LIU Jizhen. Robust Gain Scheduling Controller Based on Loop shaping[J]. Information & Control, 2005, 34(2): 152-156. (in Chinese) DOI:10.3969/j.issn.1002-0411.2005.02.006 |
| [5] | HUGHES H, WU F. Optimal Control for Spacecraft Large Angle Manuevers Using H Infinity Linear Varying Parameter Control Techniques[C]//AIAA Guidance, Navigation and Control Conference and Exhibit, 2006 |
| [6] | APKARIAN P, GAHINET P, BECKER G. Self-Scheduled H∞ Control of Linear Parameter-Varying Systems:a Design Example[J]. Automatica, 1995, 31(9): 1251-1261. DOI:10.1016/0005-1098(95)00038-X |
| [7] | DE OLIVEIRA P J, OLIVEIRA R C L F, LEITE V J S, et al. H∞ Guaranteed Cost Computation by Means of Parameter-Dependent Lyapunov Functions[J]. Automatica J IFAC, 2004(6): 1053-1061. |
| [8] |
邵朋院.大尺度变参数无人机鲁棒变增益控制方法研究[D].西安: 西北工业大学, 2016 SHAO Pengyuan. Robust Gain-Scheduling Control of UAV with Parameter Varying in Large Scale[D]. Xi'an, Northwestern Polytechnical University, 2016(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10699-1017803648.htm |
| [9] | REBERGA Luc. LPV Modeling of a Turbofan Engine[J]. IFAC Proceedings Volumes, 2005, 38(1): 526-531. |
| [10] | TIAN Z, TAN D, WANG X. A Comparative Study of LPV Modeling for Turbofan Engines[C]//AIAA/SAE/ASEE Joint Propulsion Conference, 2017 |
| [11] | BRUZELIUS F, BREITHOLTZ C, PETTERSSON S. LPV-Based Gain Scheduling Technique Applied to a Turbo Fan Engine Model[C]//International Conference on Control Applications, 2002: 713-718 |
| [12] |
吴斌, 黄金泉. 基于切换多胞LPV的涡扇发动机全包线中间状态控制[J]. 航空动力学报, 2016, 31(8): 2040-2048.
WU Bin, HUANG Jingquan. Intermediate State Control of Turbofan Engine in Full Envelope Based on Switched Polytopic Approach[J]. Journal of Aerospace Power, 2016, 31(8): 2040-2048. (in Chinese) |
| [13] |
虞忠伟, 陈辉堂, 王月娟. 基于LMI方法的机器人LPV鲁棒H∞控制器设计[J]. 控制与决策, 2001, 16(2): 146-150.
YU Zhongwei, CHEN Huitang, WANG Yuejuan. Robot Manipulator LPV Robust H∞ Controller Design Based on LMI Approach[J]. Control & Decision, 2001, 16(2): 146-150. (in Chinese) DOI:10.3321/j.issn:1001-0920.2001.02.004 |
| [14] | RAO P Shrikant, SEN I. Robust Pole Placement Stabilizer Design Using Linear Matrix Inequalities[J]. IEEE Trans on Power Systems, 2000, 15(1): 313-319. DOI:10.1109/59.852138 |
| [15] | LU F, QIAN J, HUANG J, et al. In-Flight Adaptive Modeling Using Polynomial LPV Approach for Turbofan Engine Dynamic Behavior[J]. Aerospace Science & Technology, 2017, 64: 223-236. |
| [16] |
袁士春, 郭晨, 刘雨. 船舶航向与柴油主机联合LPV鲁棒控制及仿真[J]. 系统仿真学报, 2008, 20(7): 1812-1816.
YUAN Shichun, GUO Chen, LIU Yu. Integrated Robust Control and Simulation for Ship Steering-Main Diesel Engine Using Linear Parameter-Varying Representation[J]. Journal of System Simulation, 2008, 20(7): 1812-1816. (in Chinese) |
| [17] |
俞立. 鲁棒控制:线性矩阵不等式处理方法[M]. 北京: 清华大学出版社, 2002.
YU Li. Robust Control-Linear Matrix Inequality Method[M]. Beijing: Tsinghua University Press, 2002. (in Chinese) |
| [18] | APKARIAN P, GAHINET P, BECKER G. Self-Scheduled H∞ Control of Linear Parameter-Varying Systems:a Design Example[J]. Automatica, 1995, 31(9): 1251-1261. DOI:10.1016/0005-1098(95)00038-X |
| [19] |
李华聪, 王鑫, 韩小宝, 等. 航空发动机线性变参数建模方法研究[J]. 推进技术, 2007, 28(4): 418-421.
LI Huacong, WANG Xin, HAN Xiaobao, et al. Study of Aeroengine Linear Parameter Varying Modeling[J]. Journal of Propulsion Technology, 2007, 28(4): 418-421. (in Chinese) DOI:10.3321/j.issn:1001-4055.2007.04.017 |
2. School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China;
3. Beijing Power Machinery Institute, Beijing 100074, China
