

正方形组合可展机构具有机构的可动性和保型性,故在航空[1]、航天[2-3]、建筑[4]和医疗[5]等领域应用越来越广泛。由于这种可展机构在运动过程中存在奇异位型,会导致机构沿非设计路径运动的现象,失去运动的可控性,造成严重后果,因此,开展可展机构的路径跟踪是可展机构设计的重要内容,而且对运动控制和稳定性控制的构建具有重要理论意义。
路径跟踪作为正方形组合可展机构设计中的重要环节,国内外学者对机构的路径跟踪做了大量的研究。沈金等[6]建立了杆系的运动控制方程,证明了判别机构可动性的必要条件是平衡矩阵的位移模态大于零,阐述了运动分岔的理论原因。徐静[7]运用矩阵理论和能量准则,阐述了铰接杆系的几何稳定性,解释了协调矩阵的物理意义。谢雅琪等[8]对柔性结构的折痕展开过程进行了研究,并对其进行分析、建模和仿真。Deng等[9]基于能量准则和几何非线性理论,提出了铰接连杆的统一分类,并探讨了机构势能的二阶变化显示其稳定性,对没有内力的无穷小机构则考虑其势能高阶变化。张春等[10]基于有限元法建立可展天线的动力学模型,得到了天线展开速度对可展机构的稳定性影响较大的规律。Li等[11]基于线弹性分析和子结构方法,研究了单元个数、展开角度以及杆长在展开结束后对结构失稳的影响,研究结果有利于减少预算并提高计算效率。目前对正方形组合可展机构的研究主要集中在刚体动力学、柔体动力学和瞬时动态特性等方面的研究[2-3],关于其路径跟踪的公开研究成果尚未发现。
研究正方形组合可展机构的路径跟踪,就要先分析正方形组合可展机构的自由度。本文根据正方形组合可展机构的几何特性,基于螺旋理论和图论求解正方形组合可展机构的自由度[12-14]。由于正方形组合可展机构是可动系统,运动路径就不能唯一确定。该机构的位移模态就大于1,各个杆件的位移模态的线性组合是组合结构的位移增量。杆件发生形变的方向不能唯一确定,因此正方形组合可展机构的运动路径具有不确定性。本文运用该机构的平衡矩阵[15]奇异值分解,求出位移模态并进行迭代,建立了该机构的路径跟踪方法,通过实例仿真分析验证了路径跟踪方法的正确性。
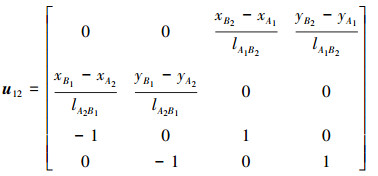
1 正方形组合可展机构可动性分析是路径规划的前提,正方形组合可展机构是一个具有大量冗余约束的串并联多闭环结构。本文首先根据正方形单元组合结构的几何特性,建立其空间笛卡尔坐标系,如图 1所示。然后运用图论把正方形组合可展机构进行分解,并绘制相应的几何约束拓扑图,如图 2所示。杆件用圆圈表示,机构的运动副用线条表示,最后求出基本单元的自由度,再进行组装得到正方形组合可展机构的自由度。根据正方形单元及其组合机构的螺旋方程组的线性相关性,其矩阵的形式为[17]:

|
(1) |

|
| 图 1 正方形组合可展机构的笛卡尔坐标系 |

|
| 图 2 正方形组合结构的约束拓扑图 |
式中, ω为各运动副的角速度, S为各运动副的旋量。
将正方形单元组合机构相应的数值代入(1)式, 可得约束矩阵S的秩为14, 而其维数为15, 所以正方形单元及其组合结构的自由度为1。
当正方形单元及其组合结构中存在丝杆铰接转动副时, 可展机构的约束就会增加2个冗余约束。对于m行n列正方形单元及其组合结构的自由度公式修正为
|
式中, F表示正方形组合可展机构的自由度, Δ表示阶数, g表示运动副的数目, fi表示第i个运动副的自由度数, v表示闭合冗余约束, ζ表示局部自由度。正方形单元及其组合结构的冗余约束为r=2(m-1)(n-1)。
2 位移模态求解分析正方形组合可展机构的系统的运动路径, 首先需要研究该系统是否可动; 其次需要分析该系统具有确定性运动; 最后再对该系统进行路径跟踪。只有正方形组合可展机构系统稳定, 才能求出其平衡状态, 进而求出其位移模态。
2.1 系统稳定性拉格朗日-狄利克雷定理是解决结构稳定性最有效的方法。如果系统的势能最小, 可以保证系统的稳定性, 即系统处于平衡状态。平衡状态的势能增量展开为泰勒级数
|
(2) |
|
(3) |

|
(4) |

|
(5) |
式中, Π表示系统势能的广义坐标的函数, d为广义坐标, λ为控制参数, di表示第i个杆件的节点位移, q表示广义坐标的维数。
通常情况下, 势能函数的二阶变分大于零时, 即满足下式时系统处于稳定的平衡状态。
|
式中, KT表示切向刚度矩阵。势能函数的δ2Π就是KT的二次型, 判断系统是否稳定, 即判断KT是否正定。

|
对于图 1所示的正方形单元及其组合结构, 假设其节点数为j、杆件数为b以及支座约束数为c, 则此结构的总自由度数为nj-c(n对平面和空间问题分别取2或3)。根据虚功原理, 其平衡方程可表示为
|
(6) |
式中, t表示轴力向量, e表示虚拟伸长向量。根据(6)式和有限元的基本理论, 正方形单元及其组合结构处于平衡状态时, 需要满足的条件如(7)~(9)式所示。
力的平衡方程:

|
(7) |
式中,A((nj-c)×b)为平衡矩阵。
形变的几何方程

|
(8) |
式中, M表示为对角矩阵, 
材料的物理方程

|
(9) |

|
(10) |
式中, B为协调矩阵, BL=AT为协调矩阵的线性部分, BNL为协调矩阵的非线性部分, BNL1是d的一阶线性部分。
2.2 平衡矩阵根据矩阵分析的基本理论, 假设矩阵A∈Crm×n (r>0), 若ATA的特征值满足

|
则称
设Crm×n(r>0), 则存在m阶酉矩阵U和n阶酉矩阵V, 使得
|
(11) |
式中, Σ=diag(σ1, σ2, …, σr), 而σi(i=1, 2, …, r)为矩阵A的全部非零奇异值。
设Hermite矩阵ATA的特征值为

|
则存在n阶酉矩阵V, 使得
|
(12) |
将酉矩阵V进行分块

|
(11) 式可变化为: 
则有:
由此可得:

|
设U1=AV1Σ-1, 则U1TU1=1, 即U1的r个列式两两正交的单位向量, 记作U1=(u1, u2, …, ur), 且可将u1, u2, …, ur扩充为Cm的标准正交基, 记增添的向量为ur+1, …, um, 并构造矩阵U2=(ur+1, …, um), 则U=[U1, ┋ U2]=(u1, u2, …, ur, ur+1, …, um)是m阶酉矩阵, 且有U1U1T=Ir, U2U1T=0。
从而可得
|
综上可得, A的奇异值由A唯一决定, A的所有特征值全是非负实数, A对应的酉矩阵U和V不唯一确定。因此, 矩阵A的奇异值分解方式也不唯一。
对矩阵A进行奇异值分解, 可以得到

|
如果将奇异矩阵写成子矩阵的形式, 即

|
式中, r为矩阵A的秩, A中非零对角元素的个数, Ur=[u1, u2, …, ur]为正方形组合可展机构的所有的非几何协调位移的模态, 也是其能够平衡外部节点荷载的模态, Um=[ur+1, …, unj-c]为正方形组合可展机构所有几何协调位移的模态, 也是其不能平衡节点荷载模态, Vr=[v1, v2, …, vr]为正方形组合可展机构的非自平衡的内力模态, 也是其杆件产生非协调变形的模态, Vs=[vr+1, vr+2, …, vs], 为正方形组合可展机构的自应力模态, 也是其杆件产生协调变形的模态。
由于平衡协调矩阵可以相互转化, 酉矩阵U和V的子空间具有双重的静力学和动力学解释。
3 路径跟踪方法根据前述平衡矩阵的理论, 做如下假设:正方形组合可展机构的初始构型处于平衡状态Ri, 对正方形组合可展机构的平衡矩阵的奇异值进行分解以实现数据降维, 从而得到正方形组合结构的位移模态。把该机构的位移模态方向作为位移增量的方向, 令正方形组合可展机构的全部节点产生了位移是δUr+1, Ur+1是表征了位移的方向矢量, 即正方形组合可展机构的位移模态。完成以上位移后, 正方形组合可展机构处于R′i的假想状态, R′i这个状态是为了数学计算的方便而插入状态, 真实运动中不存在这个状态。因而对R′i状态下正方形组合可展机构的平衡矩阵进行奇异值分解, 可得R′i的位移模态, 对R′i时刻的位移模态进行组合和迭代计算, 得到所求未知量。完成R′i时刻位移, 正方形组合可展机构处于新平衡状态Ri+1。求下一个平衡状态Ri+2, 可以重复上述Ri到Ri+1的步骤求解, 即开始新一轮的循环。最终得到正方形组合可展机构的完整运动轨迹。
如图 3所示, 正方形组合可展机构的所有节点从状态Ri迭代到状态Ri+1, 需满足协调方程:

|

|
| 图 3 正方形组合可展机构路径跟踪 |
式中, Bi表示Ri时刻的初始状态, U表征状态Ri迭代到状态Ri+1正方形组合可展机构所有节点位移向量
|
式中, δ表示增量系数, Ur+1表示状态Ri时刻的正方形组合可展机构的位移模态, d表示状态R′i迭代到状态Ri+1正方形组合可展机构所有节点位移向量。
为了计算的方便, 假定
|
(13) |
U′i是状态R′i时刻下正方形组合可展机构的平衡矩阵奇异值分解后得到的位移模态。
对于正方形组合可展机构, 其平衡状态不仅无内力而且无变形的。从平衡状态Ri迭代到平衡状态Ri+1正方形组合可展机构的所有杆件的长度都是定值, 其杆件的变形量e=0。
假定正方形组合可展机构处于状态Ri时刻, 其节点的坐标向量为

|
正方形组合可展机构的所有节点从状态Ri迭代到状态R′i的位移增量为

|
(14) |
状态R′i所有节点坐标向量为
|
式中, X′i={x′1, y′1, x′2, y′2, …, x′nj-c, y′nj-c}T。
从正方形组合可展机构的状态Ri到状态R′i, 令杆件的变形量为b×1维列向量e, 可得

|
式中, B为状态Ri时刻的协调矩阵, BL, BNL分别为状态Ri时刻的协调矩阵的线性部分和非线性部分; 对ij杆有

|
(15) |
根据正方形组合可展机构的位移模态物理含义分析可得

|
(16) |
代入(14)式可得e=BNLU1。
由(16)式可知, 正方形组合可展机构的所有节点从状态Ri到状态R′i时刻杆件的变化量产生于协调矩阵的非线性部分。
正方形组合可展机构运动过程是无内力和无变形的, 因此正方形组合可展机构的杆件变形量为零, 要使得该机构的杆件从状态R′i迭代到状态Ri+1杆件变形量就必须减少e。
从状态R′i迭代到状态Ri+1杆件位移增量为

|
(17) |
状态Ri+1时刻正方形组合可展机构所有节点的坐标向量为

|
正方形组合可展机构从状态R′i到状态Ri+1需满足协调方程

|
(18) |
为了提高运算效率, 令正方形组合结构的杆件沿变形方向返回, 此时需满足(13)式。
若(18)式中B′NL仅为高阶无穷小量, 则
|
(19) |
将(13)、(17)、(19)式代入(18)式可以得到
|
(20) |
由于B′和U′i都在状态R′i下求得, 所以B′和U′i具有相关性, 代入(10)式可得
|
(21) |
假设

|
(22) |

|
(23) |
|
(24) |
将(21)式代入(20)式的左边, 可得
|
(25) |
式中
|
|
(26) |
U中的列是全部两两正交的单位向量, 可得
|
(27) |
将(26)式代入(24)式可得
|
(28) |
将(28)式代入(25)式右侧, 得
|
(29) |
设β=[β1, β2, …βr, 0, …, 0]T, 将(18)、(21)、(23)式代入(29)式后, 可得

|
V中的列是全部两两正交的单位向量, 可得

|
(30) |
将(30)式两边同乘单位向量VT可得
|
(31) |
由(30)式和(31)式可得

|
(32) |
解(32)式可得

|
(33) |
将(13)、(15)式代入(33)式得:
|
从而可得:Xi+1=Xi+U1+U2。即

|
(34) |
为了验证前述路径跟踪方法的有效性, 需建立数字仿真模型, 从而进行验证。
图 4所示正方形组合可展机构中, 假设每根杆件的长度均为l, 杆件3与x轴的夹角为θ, 正方形组合可展机构中所有剪式单元的杆件的铰接于质心处。杆件2和杆件3满足几何约束方程式
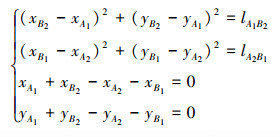
|
(35) |

|
| 图 4 正方形组合结构及坐标系 |
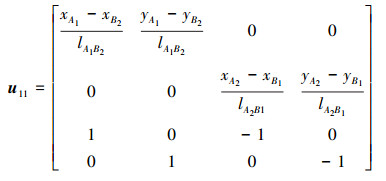
对上述几何约束方程求偏导, 得到正方形组合可展机构中剪式单元的雅克比矩阵
|
式中
|
|
根据剪式单元在正方形组合可展机构中的位置关系, 对雅克比矩阵进行组装得到正方形组合可展机构的总体雅克比矩阵。
对于图 4正方形组合可展机构进行路径跟踪, 先根据前述自由度求解方法, 此时, m=3, n=3, 正方形组合可展机构含有的冗余约束数

|
正方形组合结构中独立的自由度个数
|
正方形组合结构的节点的自由度个数

|
假设正方形组合可展机构路径跟踪时, 其初始状态Ri所有节点坐标向量为Xi

|
设定δ=0.005, 机构学中的雅克比矩阵就是协调矩阵的线性部分BL, 由(9)式得
|
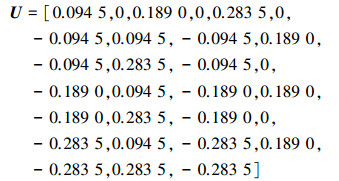
根据(12)式对正方形组合可展机构的平衡矩阵的奇异值分解以实现数据降维, 即此时平衡矩阵的秩为29, 从而得到正方形组合结构的位移模态U
|
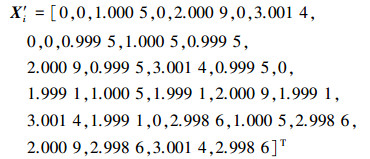
此时正方形组合可展机构的节点位移为
|
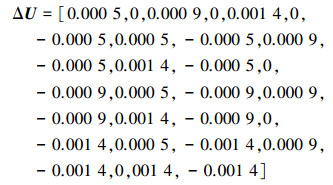
当正方形组合可展机构处于状态R′i所有节点坐标向量为
|
同理, 可以得到正方形组合可展机构处于状态R′i是的雅克比矩阵J′。
经过迭代后, 得到正方形组合可展机构状态R′i下的位移模态为
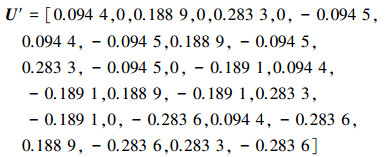
|
正方形组合可展机构从状态R′i迭代到状态Ri+1的过程中, 全部杆件的变形量为
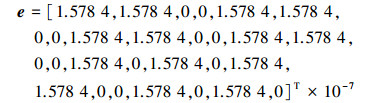
|
正方形组合可展机构从状态R′i到状态Ri+1的过程中, 可得其全部节点坐标的变化量为
|
由(34)式可得, 正方形组合可展机构状态Ri+1的所有节点的坐标向量为
|
运用上述迭代方法, 对正方形组合可展机构进行路径跟踪。首先求出正方形组合可展机构中剪刀单元的雅克比矩阵, 再运用有限元的理论对单元的雅克比矩阵进行组装, 从而得到正方形组合可展机构的雅克比矩阵。根据前述求解平衡矩阵的方法, 设定相应的参数, 求出正方形组合可展机构在迭代次数为1, 500, 1 000和1 680次时的位形如图 5~图 8所示。图 9为正方形组合可展机构平衡矩阵的最小特征值变化情况。

|
| 图 5 正方形组合可展机构1次迭代后的位形 |

|
| 图 6 正方形组合可展机构500次迭代后的位形 |

|
| 图 7 正方形组合可展机构1 000次迭代后的位形 |

|
| 图 8 正方形组合可展机构迭代1 680次后的位形 |

|
| 图 9 正方形组合结构迭代1 680次时平衡矩阵的最小非零特征值 |
由图 5~图 8可以看出, 运用位移模态的方法得到位形变化和正方形组合可展机构仿真的规律是一致的, 说明运用平衡矩阵的分析正方形组合可展机构的路径跟踪是可行的。由图 9可以看出, 正方形组合可展机构的正方形组合可展机构的所有节点从平衡状态Ri迭代到平衡状态R′i, 再从状态R′i迭代到状态Ri+1的过程中, 正方形组合结构的非零特征值在经过循环迭代1 680次后, 非零特征值的变化规律逐渐减小达到0附近, 即正方形组合可展机构运动的路径接近奇异点, 该机构在奇异点会发生分岔现象。正方形组合可展机构的自由度不为1, 无法按照规划路径运行, 失去控制性和稳定性, 甚至导致重大安全事故。
为了避免正方形组合可展机构路径中奇异现象的出现,采用增加额外约束使得自由度为1,规划合理路径的方法避开奇异点。由于正方形组合可展机构在特定的位置才会发生奇异现象,通过位移跟踪的方法可以找到发生奇异现象的特殊位置,对正方形组合可展机构的各杆件的铰接点限定旋转方向和限制在某一特定位置。正方形组合可展机构的平衡矩阵即雅克比矩阵是病态矩阵,运用额外约束和规划合理路径就是截断和修正病态矩阵的奇异值,使得平衡矩阵在奇异点的奇异特性发生改变,从而使正方形组合可展机构运动避开奇异点。
5 结论1) 针对正方形组合可展机构其约束数目难以精确确定的问题,提出了运用图论和螺旋理论相结合求解正方形组合可展机构的自由度的方法。
2) 推导出正方形组合可展机构的平衡矩阵,并对雅克比矩阵进行奇异值分解达以达到降秩目的,从而求得正方形组合可展机构的位移模态。通过位移模态迭代,最后得到了正方形组合可展机构的路径,并使用仿真方法验证了路径跟踪方法的有效性。
3) 通过仿真得到正方形组合可展机构分岔点的位置,分析路径跟踪过程,发现其雅克比矩阵是病态矩阵。通过增加额外约束和规划合理路径可以改变平衡矩阵的奇异性,从而避免分岔现象。
| [1] | CHU Zhengrong, DENG Zongquan, QI Xiaozhi, et al. Modeling and Analysis of a Large Deployable Antenna Structure[J]. Acta Astronautica, 2014, 95(1): 51-60. |
| [2] | YOU Z, PELLEGRINO S. Cable-Stiffened Pantographic Deployable Structures. Ⅰ-Triangular Mast[J]. AIAA Journal, 2012, 34(4): 813-20. |
| [3] | CARPENTIERI G, SKELTON R E, FRATERNALI F. A Minimal Mass Deployable Structure for Solar Energy Harvesting on Water Canals[J]. Structural & Multidisciplinary Optimization, 2016, 55(2): 1-10. |
| [4] | LEDERMAN G, YOU Z, GLIŠC B. A Novel Deployable Tied Arch Bridge[J]. Engineering Structures, 2014, 70: 1-10. DOI:10.1016/j.engstruct.2014.03.015 |
| [5] | Patel S N, Gupta S, Reynolds M S. The Design and Evaluation of an End-User-Deployable, Whole House, Contactless Power Consumption Sensor[C]//Proceedings of the Sigchi Conference on Human Factors in Computing Systems, 2010 |
| [6] |
沈金, 楼俊晖, 邓华. 杆系机构的可动性和运动分岔分析[J]. 浙江大学学报, 2009, 43(6): 1083-1089.
SHEN Jin, LOU Junhui, DENG Hua. Movability and Kinematic Bifurcation Analysis for Pin-Bar Mechanisms[J]. Journal of Zhejiang University, 2009, 43(6): 1083-1089. (in Chinese) DOI:10.3785/j.issn.1008-973X.2009.06.020 |
| [7] |
徐静.铰接杆系机构的运动形态研究[D].杭州: 浙江大学, 2007 XU Jing. Studies on the Kinematic Morphology of Pin-Bar Mechanisms[D]. Hangzhou: Zhejiang University, 2007(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10335-2007072707.htm |
| [8] |
谢雅琪, 关富玲. 基于折痕特性的柔性结构展开过程分析[J]. 工程设计学报, 2013, 20(6): 482-488.
XIE Yanqing, GUAN Fuling. Deployment Analysis of Flexible Structure Based on Characteristics of Creases[J]. Chinese Journal of Engineering Design, 2013, 20(6): 482-488. (in Chinese) DOI:10.3785/j.issn.1006-754X.2013.06.006 |
| [9] | DENG H, KWAN A. Unified Classification of Stability of Pin-Jointed Bar Assemblies[J]. International Journal of Solids & Structures, 2005, 42(15): 4393-4413. |
| [10] |
张春, 王三民, 袁茹. 空间可展机构弹性动力学特性研究[J]. 机械科学与技术, 2007, 26(11): 1479-1482.
ZHANG Chun, WANG Sanmin, Yuan Ru. On Elastodynamic Characteristics of Space Deployable Mechanism[J]. Mechanical Science & Technology for Aerospace Engineering, 2007, 26(11): 1479-1482. (in Chinese) DOI:10.3321/j.issn:1003-8728.2007.11.024 |
| [11] | LI Bo, WANG Sanmin, YUAN Ru, et al. Dynamic Characteristics of Planar Linear Array Deployable Structure Based on Scissor-Like Element with Joint Clearance Using a New Mixed Contact Force Model[J]. Journal of Mechanical Engineering Science, 2016, 230(18): 3161-3174. DOI:10.1177/0954406215607903 |
| [12] |
李剑锋, 王三民, 智常建, 等. 基于螺旋理论的正方形单元及其组合机构瞬时自由度分析[J]. 西北工业大学学报, 2017, 35(5): 863-869.
LI Jianfeng, WANG Sanmin, ZHI Changjian, et al. Instantaneous Mobility Analysis of Square Unit and Its Combined Mechanism Based on Screw Theory[J]. Journal of Northwestern Polytechnical University, 2017, 35(5): 863-869. (in Chinese) DOI:10.3969/j.issn.1000-2758.2017.05.018 |
| [13] | DAI Jiansheng. Screw Algebra and Lie Groups and Lie Anlgebras[M]. Beijing: Higher Education Press, 2014. |
| [14] | DIESTEL R. Graph Theory[M]. Berlin: Springer Publishing Company, Incorporated, 2018. |
| [15] | SANDOR M. Introduction to Matrix Theory[M]. Beijing: Beihang University Press, 2014. |
