



高超声速飞行器再入过程飞行速度快、空域广、动力学参数变化大, 不同通道间耦合严重, 因而必须针对性地设计控制器, 使其在复杂飞行条件下仍能具有满意的飞行品质与性能[1-2]。
迭代学习控制(ILC)问世于20世纪80年代, 当系统在有限时间区间上执行重复运动时, 这种方法能够不断根据前次迭代的信息调整下次迭代的控制器, 最终实现在有限时间区间上的零误差跟踪[3]。传统的迭代学习控制面临诸多限制:相同的初始条件、全局Lipschitz条件以及系统相关度应为零等。变结构迭代学习控制则结合了变结构控制与迭代学习控制的优点, 能够获得更优良的鲁棒性和迭代误差收敛性能[4]。文献[4-6]均采用迭代学习控制结合变结构控制来处理复杂对象, 文献[7-10]采用自适应迭代学习控制处理初值、不确定性等问题。
反步法(back-stepping)设计策略在变结构控制中是一个重要的议题。针对高阶系统, 反步法通过求解每一步的虚拟控制量, 在最后一步成功地得到了实际控制量[11-12]。反步法中存在的微分膨胀问题, 可以采用动态面控制策略解决[13]。
本文在研究文献[13-15]的基础上, 基于线性条件[14], 提出一种系统的自适应迭代学习控制器设计方法。这种新型的自适应迭代学习控制器由三部分组成:用于估计未知非线性函数的迭代学习率, 用于估计未知时不变参数的自适应率以及变结构控制器。
本文的创新点主要为:针对高超声速飞行器姿态模型, 提出一种新型迭代学习控制器设计方法。通过结合先进控制策略与迭代学习控制设计, 本方法具有对气动拉偏的强鲁棒性。
1 再入飞行器数学姿态模型本节研究高超声速飞行器再入大气层阶段的姿态控制问题。高超声速飞行器姿态运动模型如下

|
(1) |
式中, α, β, γ分别为飞行器的攻角、侧滑角和倾侧角。ωx, ωy, ωz分别为飞行器的旋转角速度, m, V, θ分别为飞行器的质量、速度和弹道倾角。Y, Z分别为作用在飞行器上的升力和侧向力。Mx, My, Mz分别为作用在飞行器上的滚转、偏航、俯仰力矩。Jx, Jy, Jz分别为飞行器的转动惯量。以q, S, l分别表示动压、参考面积、参考长度。
气动力表达式为

|
(2) |
气动力矩表达式为
|
(3) |
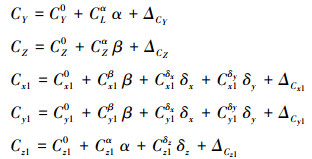
气动系数在某特征点附近拟合为
|
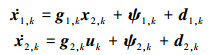
考虑再入飞行器在[0, T]上执行任务, 将模型化为如下形式
|
(4) |
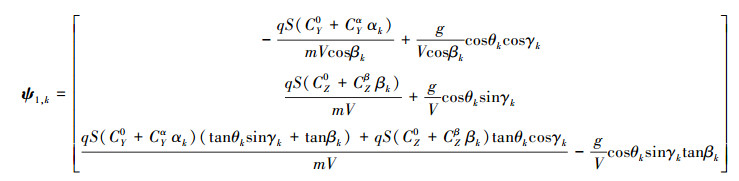
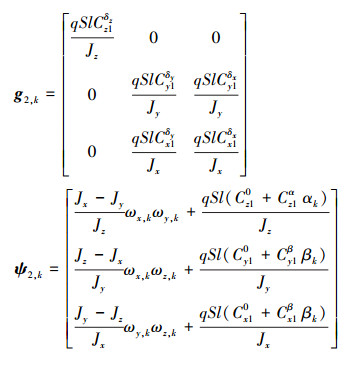
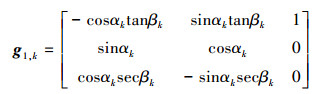
式中,k为迭代次数。x1, k=[αk βk γk]T, x2, k=[ωz, k ωy, k ωx, k]T为飞行器姿态状态量, uk=[δz, k δy, k δx, k]T控制输入。各项具体形式如下
|
|
|
式中,q为动压, S为飞行器参考面积, l为飞行器参考长度, CY0为基本升力系数, CZβ为基本侧向力系数, Cxβ为基本滚转力矩系数, Cy0为基本俯仰力矩系数, Czβ为基本偏航力矩系数。C*δ*为各舵引起的力和力矩系数。Cxωx, Cyωy和Czωz分别为舵引起的阻尼力矩系数。d1, k=[d11, k, d12, k, d13, k]T和d2, k=[d21, k, d22, k, d23, k]T包含未建模动态、参数摄动和干扰项等。
为方便控制器的设计, 本文假定以下条件成立。
假设1 干扰dij, k是有界量。其中i=1, 2, j=1, 2, 3。
假设2 非线性函数向量ψi, k=[ψi1, k, ψi2, k, ψi3, k]T是光滑连续的, 满足Lipschtiz条件。这意味着在任何一次迭代, 有限时间区间[0, T]上(5)式成立

|
(5) |
假设3 参考指令yc是可导的并且导数有界。
假设4 系统在首次迭代的初始时刻有界。
2 控制器设计本部分将依据反步法设计步骤, 针对系统(1)设计迭代学习控制器。每一步都能得到虚拟控制量, 在最后一步设计出真实控制量。
使用yc代表控制参考指令, 则yc=[αc βc γc]T并令x1d=yc。则误差可写为

|
(6) |
式中,x2d, k表示虚拟控制量。
第1步 针对状态x1, k设计虚拟控制量x2d, k。
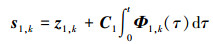
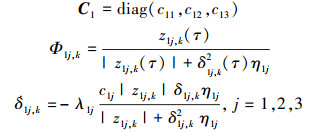
选取滑模面
|
(7) |
式中,Φ1, k=[Φ11, k, Φ12, k, Φ13, k]T。
|
对滑模面求导得

|
(8) |
设计虚拟控制量x2c, k如下

|
(9) |
式中,σ1, k=s1, k+z1, k。
迭代学习率

|
(10) |
式中,α1=diag(α11, α12, α13)为正定对角阵

|
函数m1, k=[m11, k, m12, k, m13, k]T设计如下
矩阵元素

|
(11) |
式中,γm1=diag(γm11, γm12, γm13)为正定对角阵
|
r1, k=[r11, k, r12, k, r13, k]T设计如下

|
(12) |
式中,γr1=diag(γr11, γr12, γr13)为正定对角阵
|
控制器设计中的参数k1, 1=diag(k11, 1, k12, 1, k13, 1), k1, 2=diag(k11, 2, k12, 2, k12, 3)为正定对角阵; 迭代学习率中的量



使x2d, k作为x2c, k的低通滤波器输出, 且满足

|
(13) |
式中,μ=diag(μ1, μ2, μ3)为滤波器时间常数矩阵。
第2步 对状态x2, k设计实际控制量uk。
选取滑模面

|
(14) |
式中
|
自适应率

|
对滑模面求导得

|
(15) |
设计实际控制量uk如下

|
(16) |
式中,σ2, k=s2, k+z2, k。
迭代学习率

|
(17) |
式中,α2=diag(α21, α22, α23)为正定对角阵。
矩阵元素β2l(m, n)=β2l, mn≥0
函数m2, k=[m21, k, m22, k, m23, k]T设计如下

|
(18) |
式中,γm2=diag(γm21, γm22, γm23)为正定对角阵
|
r2, k=[r21, k, r22, k, r23, k]T设计如下

|
(19) |
式中,γr2=diag(γr21, γr22, γr23)为正定对角阵
|
控制器设计中的参数k2, 1=diag(k21, 1, k22, 1, k23, 1), k2, 2=diag(k21, 2, k22, 2, k22, 3)为正定对角阵; 迭代学习率中的量


至此实际控制量uk设计完毕。
3 稳定性和收敛性证明引理1 系统(1)满足线性条件。线性条件指的是每次迭代初值和前次迭代终值相同。选取Lyapunov函数Wk如下
|
(20) |
式中,λi=diag(λi1, λi2, λi3), ωk=x2d, k-x2c, k
求导可得
|
(21) |
由于
|
(22) |
将滑模表达式代入可得
|
(23) |
式中,


令


|
(24) |
选取


以
|
(25) |
式中,

|
(26) |
接下来首先证明V0(t)在有限时间区间[0, T]上的有界性; 然后需要证明Vk(t)随着k的增大而单调递减的特性; 最终证明
对Vk求导可得
|
(27) |
将迭代学习率(10)式、(17)式代入
|
(28) |
由于
|
(29) |
选取参数如下

|
(30) |
选取

|
(31) |
由于
|
(32) |
对(30)式积分可得

|
(33) |
由于ψij, 02在[0, T]上为光滑连续函数, 可知Q0= 
|
(34) |
结合迭代学习率可知
|
(35) |
结合(27)至(29)式所采用的方法, 并选取同样参数Mij, 代入(33)式可得
|
(36) |
结合(23)式可知
|
(37) |
因而

|
(38) |
结合线性条件Wk(0)=Wk(T)

|
(39) |
定义
则可得
|
(40) |
因而Vk≤Wk(0)+Q
可知Vk(T)和Wk(T)有界。由于Wk(0)=Wk-1(T)可知Vk在[0, T]上有界和其中各个分量有界, 同时说明滤波器参数矩阵存在。
|
(41) |
由于Vk(T)正定有界可知
|
(42) |
最终可知在有限时间区间[0, T]上

|
(43) |
至此稳定性和收敛性证明完毕。在使用本文所设计的控制器后, 状态量跟踪误差最终会渐进收敛至零。
4 仿真以I3表示三维单位矩阵, 控制参数为λ1=0.6I3, η1=0.5I3, γm1=10-3I3, γr1=γr2=10-2I3M1=M2=1.2I3, α1=α2=0.7I3, k11=k12=2.1I3
|
在仿真中选取时变等效干扰力和等效力矩如下

|
干扰项d1, k和d2, k在t=6 s后加入系统。仿真采用的指令x1d=[8, 0, 10]°, 使用方波经过惯性环节产生。
Case 1 给予方波指令使飞行器连续运行, 并在指定的时间t=6 s加入等效干扰和干扰力矩, 用以验证控制器的有效性和对干扰的鲁棒性。
仿真结果如图 1和图 2所示。图 1a)表明跟踪响应的超调量随着迭代次数的增加而迅速下降, 在迭代10次以后已经到达一个较小值。由于根据滑动模态、跟踪误差、前次迭代结果这几种信息学习, 1~4次迭代已经使超调量下降较多。

|
| 图 1 误差关于迭代次数变化曲线 |

|
| 图 2 状态关于时间变化曲线 |
图 1b)展示t=3.8 s时系统的稳态误差随迭代次数增长的变化, 即未加入干扰力与力矩的稳态误差, 曲线表明1~8次迭代学习效果明显, 攻角误差下降较快, 侧滑角与倾侧角误差较小。
图 1c)展示t=7.8 s时系统的稳态误差, 此时等效干扰力与力矩已经加入。曲线表明1~8次迭代学习效果明显, 10次后姿态角误差稳定到较小值。
图 2是飞行器响应关于迭代次数变化的曲线图。从图上可以看出首次迭代时跟踪响应并不理想, 但是随着迭代次数的增加, 飞行器姿态角愈来愈接近指令值。小时由于控制器具有学习能力, 干扰力与力矩对系统的影响随迭代次数增加而快速降低。
说明迭代一定次数后, 系统能够以较小差值跟踪指令。同时表明控制器对干扰具有优良的鲁棒性。
Case 2 与传统滑模控制器[15]进行对比。
仿真结果如图 3所示, 选择迭代10次后系统响应, 干扰同Case 1。曲线表明系统响应的超调量、稳态误差及对抗干扰性能等都明显优于传统滑模控制, 表明本方法不仅能够较好较快跟踪指令, 并且在抗干扰性能等方面也优于传统滑模控制。

|
| 图 3 状态关于时间变化对比曲线 |
Case 3 对气动参数进行±20%的拉偏, 考察闭环系统的性能。
仿真结果如图 4所示, 标称值为无气动参数拉偏时的系统响应。可以观察到系统响应受到气动参数拉偏影响较小。这是因为学习率根据实际系统运动来估计非线性函数, 因而当加入气动拉偏后学习率所估计的同样是加入拉偏的非线性函数并将估值反馈至控制器, 当估值足够准确就会表现出闭环系统受拉偏影响较小的特点。这说明本方法设计的控制器能够适应气动参数的不确定性变化, 并且其他方面的性能损失较小, 具有较强的鲁棒性。

|
| 图 4 拉偏下系统状态关于时间变化曲线 |
针对再入飞行器姿态模型提出了一种自适应迭代学习控制, 可以处理系统存在的不确定性和动态扰动。本方法结合了滑模自适应控制、反步法与迭代学习控制, 实现飞行器对指令的准确跟踪, 构造Lyapunov泛函证明系统稳定性和误差收敛性。
| [1] |
郭建国, 刘宇超, 郑强, 等. 含干扰观测器的高超声速飞行器新型滑模姿态控制[J]. 西北工业大学学报, 2017, 35(6): 941-947.
GUO Jianguo, LIU Yuchao, ZHENG Qiang, et al. A Novel Sliding Mode Attitude Control for Hypersonic Vehicle with Mismatched Uncertainties[J]. Journal of Northwestern Polytechnical University, 2017, 35(6): 941-947. (in Chinese) DOI:10.3969/j.issn.1000-2758.2017.06.002 |
| [2] |
黄琳, 段志胜, 杨剑影. 近空间高超声速飞行器对控制科学的挑战[J]. 控制理论与应用, 2011, 28(10): 1496-1506.
HUANG Lin, DUAN Zhisheng, YANG Jianying. Challenges of Control Science in Near Space Hypersonic Aircrafts[J]. Control Theory and Application, 2011, 28(10): 1496-1506. (in Chinese) |
| [3] | BRISTOW D A, THARAYIL M, ALLEYNE A G. A Survey of Iterative Learning Control[J]. IEEE Control Systems, 2006, 26(3): 96-114. DOI:10.1109/MCS.2006.1636313 |
| [4] | ZHU Q, XU J X, HUANG D, et al. Iterative Learning Control Design for Linear Discrete-Time Systems with Multiple High-Order Internal Models[J]. Automatica, 2015, 62: 65-76. DOI:10.1016/j.automatica.2015.09.017 |
| [5] | TAYEBI A. Adaptive Iterative Learning Control for Robot Manipulators[J]. Automatica, 2004, 40(7): 1195-1203. DOI:10.1016/j.automatica.2004.01.026 |
| [6] |
严求真, 孙明轩, 李鹤. 任意初值非线性不确定系统的迭代学习控制[J]. 自动化学报, 2016, 42(4): 545-555.
YAN Qiuzhen, SUN Mingxuan, LI He. Iterative Learning Control for Nonlinear Uncertain Systems with Arbitrary Initial State[J]. Acta Automatica Sinica, 2016, 42(4): 545-555. (in Chinese) |
| [7] | CHI R, HOU Z, XU J. Adaptive ILC for a Class of Discrete-Time Systems with Iteration-Varying Trajectory and Random Initial Condition[J]. Automatica, 2008, 44(8): 2207-2213. DOI:10.1016/j.automatica.2007.12.004 |
| [8] | ZHANG C L, LI J M. Adaptive Iterative Learning Control of Non-Uniform Trajectory Tracking for Strict Feedback Nonlinear Time-Varying Systems with Unknown Control Direction[J]. Applied Mathematical Modelling, 2015, 39(10/11): 2942-2950. |
| [9] | WEI J, ZHANG Y, SUN M, et al. Adaptive Iterative Learning Control of a Class of Nonlinear Time-Delay Systems with Unknown Backlash-Like Hysteresis Input and Control Direction[J]. ISA transactions, 2017, 70: 79-92. DOI:10.1016/j.isatra.2017.05.007 |
| [10] |
余琼霞, 侯忠生. 非参数不确定系统的自适应迭代学习控制[J]. 系统科学与数学, 2016, 36(1): 1-13.
YU Qiongxia, HOU Zhongsheng. Adaptive Iterative Learning Control for a Class of Non-Parametric Uncertain Systems[J]. Journal of Systems Science and Complexity, 2016, 36(1): 1-13. (in Chinese) |
| [11] | SHAO X L, WANG H L. Back-Stepping Active Disturbance Rejection Control Design for Integrated Missile Guidance and Control System via Reduced-Order ESO[J]. ISA Transactions, 2015, 57: 10-22. DOI:10.1016/j.isatra.2015.02.013 |
| [12] |
郭建国, 张添保, 周军, 等. 可重复使用飞行器归一化复合控制系统设计[J]. 宇航学报, 2016, 37(6): 639-645.
GUO Jianguo, ZHANG Tianbao, ZHOU Jun, et al. Compound Control System Design for RLV Based on Normalization Method[J]. Journal of Astronautics, 2016, 37(6): 639-645. (in Chinese) DOI:10.3873/j.issn.1000-1328.2016.06.002 |
| [13] | YIP P P, HEDRICK J K. Adaptive Dynamic Surface Control:a Simplified Algorithm for Adaptive Backstepping Control of Nonlinear Systems[J]. International Journal of Control, 1998, 71(5): 959-979. DOI:10.1080/002071798221650 |
| [14] | BENSLIMANE H, BOULKROUNE A, CHEKIREB H. Iterative Learning Control for Strict-Feedback Nonlinear Systems with both Structured and Unstructured Uncertainties[J]. Arabian Journal for Science and Engineering, 2016, 41(9): 3683-3694. DOI:10.1007/s13369-015-1901-9 |
| [15] |
刘海东, 包为民, 李惠峰, 等. 高超声速飞行器全局有限时间姿态控制方法[J]. 北京航空航天大学学报, 2016, 42(9): 1864-1873.
LIU Haidong, BAO Weimin, LI Huifeng, et al. Attitude Control Method within Finite Time Globally for Hypersonic Vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(9): 1864-1873. (in Chinese) |
