

2. 大连理工大学 海岸和近海工程国家重点实验室, 辽宁 大连 116023
随着近些年船舶智能化的发展, 船舶自动化的水平不断提高, 使得无人驾驶船舶的实现有了可能性[1]。目前无人船舶研究领域对于自主航行系统建模普遍采用基于模块分层机制的规划控制策略, 并在广义上分为路径规划、行为决策、动作规划、以及反馈控制4个模块, 其中航向反馈控制模块是实现无人船舶自主航行的最底层模块, 也是规划控制策略中最基本的控制执行模块, 可直接决定规划控制策略的整体控制效果。而船舶航向控制问题一直作为国内外船舶运动控制专家和学者的重点研究课题, 所以船舶航向反馈控制有着非常好的研究基础进行借鉴。
文献[2]采用反步法进行航向控制器设计, 并借助神经网络和L2控制策略分别处理了模型中的不确定性和外界干扰, 使得控制系统具有良好的鲁棒稳定性和跟踪精度。文献[3]提出了一种基于改进反步法的非线性控制器, 对模型的不确定性具有很强的抑制能力。文献[4]对航向反馈误差量用正弦函数进行修饰, 可在未改变控制律的情况下, 实现航向控制系统性能的提升。文献[5]利用径向基函数神经网络所构建模糊系统的逼近能力, 提出了基于反馈线性化的船舶航向保持非线性模糊控制算法。文献[6]提出了一种基于知识库的船舶智能航向保持算法。文献[7]提出了一种基于水平耦合偏航运动模型的特征值分解自适应滑模船舶航向控制器, 消除船舶航向控制系统的稳态误差。文献[8]在基于李雅普诺夫的直接方法和反步技术, 实现了在松弛条件下的欠驱动船的全局跟踪。文献[9]针对船舶航向控制系统设计了鲁棒量化反馈控制器, 可提升航向控制系统对模型摄动和外界干扰的鲁棒性。文献[10]把H∞控制策略应用于船舶航向控制系统, 并取得了很不错的效果。文献[11]对船舶航向系统的不确定性和外界干扰进行状态估计, 用以提升反步法所设计的船舶航向非线性控制器的鲁棒性。文献[12]构建了扩展状态观测器用以估计船舶航向控制的干扰, 提升船舶航向控制性能和鲁棒性。
可以说上述研究成果都是非常优秀的航向控制问题解决方案, 但大多数研究仅局限于单纯船舶航向控制算法的研究, 很少有从船舶自主航行系统规划控制策略的角度考虑船舶航向反馈控制问题。而且很多研究成果存在计算复杂度高的问题, 造成整个船舶规划控制系统上层模块计算复杂度爆炸性增长, 甚至导致不同规划控制模块之间的冲突。这里存在的问题主要有2点:
1) 以PID为主要特点传统频域控制理论尽管对系统的本质和机理分析透彻, 但单纯对反馈信号的线性组合, 导致控制器在理论上缺乏一定的严谨性, 且系统非线性特性利用效率不佳。
2) 以智能控制、自适应控制为主流的现代控制理论在控制器设计时多依赖数学方法和数学理论的使用, 尽管最终设计出的控制器有着严谨的理论证明和非线性特性的利用, 但由于缺乏对被控对象本身的工作机理的频域本质特性的研究, 所以导致最终设计出的控制结构复杂, 物理意义不明确, 非常不适合实际工程的应用。
因此本文将借鉴现代控制理论中的L2增益鲁棒控制理论和Lyapunov设计方法的严谨性特点, 融合经典频域控制理论中的闭环成形滤波的概念, 将时域控制器的设计与频域控制器的设计策略相融合, 从实际应用角度出发, 进行无人船航向系统的闭环成形滤波L2增益鲁棒控制器设计研究工作。力求设计出一种结构简捷高效、控制器参数物理意义明确、计算复杂度低、可以很好地解决无人船规划控制策略中的航向反馈控制器设计问题。
1 规划控制策略下的无人船船艏向运动数学模型 1.1 无人船规划控制策略无人船作为一个复杂的软硬件结合系统, 其安全航行需要感知、定位以及路径规划、行为决策、动作规划和反馈控制等多个模块协同配合工作, 如图 1所示。整个无人船在执行任务时需要全局路径规划模块与感知、定位模块和行为决策模块密切配合, 最终利用动作规划模块来生成最终的命令航向和命令航速。而最底层的反馈控制模块的核心任务就是完成动作规划模块传来的命令, 进行快速、精确的执行。其中船艏向的反馈控制模块更是整个无人船规划控制策略执行效果的关键。所以本文接下来将对船艏向运动数学模型和反馈控制问题进行研究, 以一种普适性很强的响应型船舶运动模型为例来表述无人船的运动, 并作为航向反馈控制器设计的基础。

|
| 图 1 无人船规划控制策略示意图 |
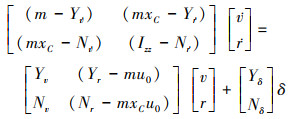
首先假定船舶前进速度保持不变, 并沿用Abkowitz的研究方案[13], 把流体动力X, Y, N展开成Taylor级数时只保留一阶小量, 并假设船舶处在等速直线运动这一平衡状态, 只考虑船舶航向控制与横漂及转艏运动之间的强耦合性, 可得到如下方程
|
(1) |
式中, 变量v和r分别代表船舶的横漂速度和转艏角速度, δ为船舶的舵角, m为船舶质量, xC为船舶质心到船舶运动坐标系远点的距离, Izz为船舶转动惯性矩, Y和N分别表示船舶在横漂方向和绕质心转动的外力。如果将(1)式的第一行两端除以ρL3/2, 第二行除以ρL4/2, 并转化为无量纲流体动力导数。
定义系统状态向量X=[v r]T, 可得到如下标准的状态空间形式
|
(2) |
式中
|
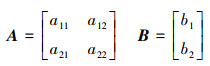
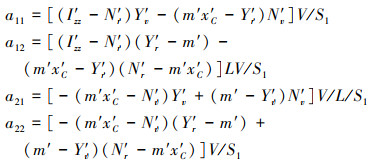
式中,A, B两矩阵中的各变量如下
|
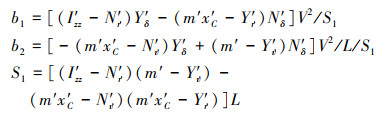
|
式中, 变量V表示船舶航速, L表示两柱间长, I′zz, m′, x′C、分别为船舶惯性矩、船舶质量、质心到原点距离的无量纲值; Y′v, Y′r, N′v, N′r, 
本文为了对外界影响下船舶航向运动与输入舵角的关系进行研究, 将(2)式的横漂运动v进行删除, 则可得到(3)式所示的二阶船舶运动方程

|
(3) |
式中
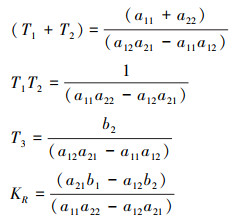
|
由此得到3个船舶时间常数T1, T2, T3以及一个系统增益系数K0。
1.3 船艏向响应型数学模型如果取舵角δ为被控对象的输入, 艏向角ψ为被控对象输出, 描述操舵对艏摇响应的传递函数为

|
(4) |
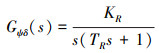
对于船舶这种大惯性大滞后的运载工具来说, 其动态特征在低频段显得尤为重要的, 上式中令s=jω→0, 且再由泰勒级数展开忽略高阶小量导出如下所示简化模型
|
(5) |
该模型为二阶响应型数学模型, 也被称作Nomoto模型。模型中KR代表船舶舵增益系数, TR代表船舶追随性系数时间常数, 其值为TR=T1+T2-T3。
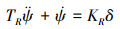
1.4 船艏向非线性数学模型(5) 式所示的船艏向二阶响应型模型的微分方程表达式为
|
(6) |
该线性数学模型用于船艏向角度变化较大的情况下描述船艏向运动是足够的, 但当船艏向变化较小时, 则船艏运动的非线性特性不能忽略[13-14], 本文将根据Amerongen和Cate所提出的将船艏转向速率用非线性函数

|
(7) |
如果将模型中模型中广义不确定项Δ1(ψ, 

|
(8) |
式中, 
船舶舵机主要起到将舵机通过机械结构按照命令舵角进行执行的设备。其简易模型通常描述为一阶线性系统
|
(9) |
式中,Te为舵机的时间常数, Ke为舵机的输入增益, δc则表示为命令舵角。如果将舵机模型的不确定项

|
(10) |
针对(8)式和(10)式所组成的船艏向-舵机数学模型, 采用反馈线性化处理方式和Lyapunov稳定性理论控制器设计来保证控制器的稳定性和鲁棒性, 同时引入经典闭环控制理论中的闭环成形滤波的概念, 实现频域和时域设计理念的结合, 同时L2增益鲁棒控制策略的引入, 也会增加最终控制器对外界干扰的抑制能力。
2.1 反馈线性化令系统的输出为y=ψ, yr为船舶艏向角输出命令信号。考虑到船舶艏摇控制的实际工程情况, 可假定ẏr=ÿr=0, 同时定义系统的跟踪误差变量为e=ψr-ψ。并定义虚拟控制输入(11)式, 将(8)式所示的船舶航向非线性数学模型进行线性化处理

|
(11) |
式中,u1作为虚拟控制变量用来抵消广义不确定项Δ1(ψ,
定义系统(8)的输入变量误差跟踪信号

|
(12) |
则(8)式可改写为

|
(13) |
定义系统命令舵角δc为
|
(14) |
则(10)式可改写为

|
(15) |
针对如图 2所示的反馈控制系统结构图, 图中G和K分别为被控对象和闭环系统控制器的传递函数, w为系统的外界干扰。其中对图 2的理解可从控制和滤波两个角度进行。

|
| 图 2 闭环成形滤波系统结构图 |
理解1 从控制的角度看, 图 2系统中控制器K设计的主要目的就是通过控制器K对被控对象G施加控制, 实现整个系统输出y对系统外部输入r的跟踪, 即可表达为传递函数GK/(1+GK)。
理解2 从滤波的角度看, 图 2系统可以看成在外界干扰w的作用下, 通过控制器K和被控对象G的闭环反馈组合, 实现整个系统输出y信号对目标信号r的稳定跟踪, 或者说是如何实现系统输出y信号在有噪声信号w的情况下实现对目标信号r的稳定跟踪, 其可表达为传递函数1/(1+GK)。
根据数学关系GK/(1+GK)+1/(1+GK)=I, 可以看出, 只要找到合适的控制器K, 图 2系统的控制问题就会得到较好解决(理解1), 同时该控制器K也可以较好地解决图 2所示系统的滤波问题(理解2)。接着我们根据控制系统的实际工程需求做如下假设:
假设1 闭环系统的工作频谱为低通, 即系统的主要工作在低频区域, 高频区域作为干扰存在;
假设2 闭环系统的频谱最大奇异值设置为1, 即系统的频谱峰值为0, 从而保证系统稳定、无静差地跟踪参考信号r;
假设3 闭环系统频谱的关门斜率可取-20 dB/dec用来对外界干扰抑制。
在这3个控制系统需求假设的基础上, 根据理解1可知, 整个闭环控制系统的控制性能可由传递函数T=GK/(GK+1)决定, 这时根据假设3, 整个闭环系统可描述为一个一阶低通滤波器F(s), 即
|
(16) |
此时整个闭环控制系统的性能将主要由系统的闭环系统的带宽频率1/λ所决定。如果闭环系统的被控对象已知, 则可根据(17)式推导出闭环系统的控制器K, 即
|
(17) |
而且结合理解1和理解2, 可知通过控制器(17)式实现整个如图 2所示闭环系统的成形滤波效果。
针对船艏向-舵机控制系统, 其被控对象的传递函数可近似表达为二阶响应型数学模型, 即公式(6), 为了实现整个控制系统闭环成形滤波的效果, 则可将系统反馈误差信号滤波器根据(17)式定义为
|
(18) |
式中, 
因此, 为了在控制器的设计中, 通过(18)式的引入可实现对整个控制系统闭环成形滤波效果, 而且起到了控制器设计降阶的效果, 即将二阶方程式(13)降为一阶方程式(19)

|
(19) |
因此整个船艏向-舵机控制系统可描述为关于变量ξ和η的一阶方程(15)和(19), 而虚拟输入u1和u2则作为系统的输入。
2.3 Lyapunov函数控制器设计采用Lyapunov方法针对(15)式和(19)式进行控制器设计, 定义Lyapunov函数(20)
|
(20) |
则V0的导数为
|
(21) |
为了能够使最终设计出的控制器能够抑制外界干扰Kd, 定义L2增益鲁棒性能函数如下

|
(22) |
式中,μ1和μ2为接近零的正数, 通常情况下, 他们的值越小, 对外界干扰的抑制能力越好, 同时对控制力矩的需求也就越大。考虑到本文主要是对船艏向误差跟踪的控制, 所以可将系统的性能评价变量E定义为E=[e ė], 则可得到
|
(23) |
将(21)式和(23)式合并, 得到
|
(24) |
则可定义虚拟控制器u1为
|
(25) |
假设系统未建模误差Δ1有界, 且|Δ1|≤ρ1, ∀ρ1>0, 则存在
|
(26) |
式中,ε1为大于零的数, 则(25)式可转化为
|
(27) |
接下来的设计主要使用虚拟控制器u2来处理模型误差Δ2。
对于(24)式中的变量
|
(28) |
则(27)式简化为

|
(29) |
令
|
则不等式(29)可简化为

|
(30) |
对(30)式进行积分, 则
|
(31) |
同时通过适当的调节控制器参数, 可得到

|
(32) |
因此整个闭环系统的所有信号满足半全局一致最终有界, 且根据(32)式可知整个系统的误差信号e, η, ξ渐进收敛到零。
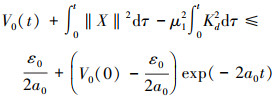
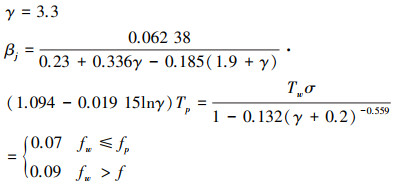
根据Lyapunov函数V0的定义可知V0(t)≥
|
式中,ε′为接近零的正数, 则最终可推导出本文所设计的控制器可满足L2增益鲁棒性能指标。
3 仿真实验分析与讨论为了验证本文所提出的航向控制器的稳定性和鲁棒性, 本文首先选取大连海事大学的“育鲲”轮, 作为本文控制算法研究的被控对象, 其基本参数如表 1所示。仿真实验中将采用4阶龙格-库塔方法进行数字仿真, 仿真条件尽可能与航海实践相符。
| 实船参数 | 数值 |
| 船舶总长/m | 116 |
| 两柱间长L/m | 105 |
| 船宽/m | 18 |
| 设计吃水/m | 5.4 |
| 排水体积/m3 | 5 735.5 |
| 方形系数 | 0.055 95 |
| 重心距离中心距离/m | -0.51 |
| 舵叶面积/m2 | 11.46 |
| 最大舵角限制/(°) | 30 |
| 最大舵角速率限制/((°)·s-1) | 2.8 |
| 船舶设计航速V/kn | 16.7 |
| 主机最大转速限制/(r·min-1) | 173 |
通过计算可得出“育鲲”轮的流体动力导数如下所示:
|
从而推导出(2)式中的a11=-0.054 8, a12=-2.151 4, a21=-0.003 1, a22=-0.181 4, b1=0.144 9, b2=-0.009 9。
最终求出KR=0.31, TR=64.53。以及船舶的非线性参数n1=8.0, n2=4 295.02。最终推导出(8)式中的α1=0.038 47α2=20.489 0, β=0.004 8。
作为航向控制系统执行机构的舵机伺服系统是一个具有纯延迟、死区、滞环、饱和等非线性特性的电动液压系统, 其对船舶航向控制的效果具有重要影响, 因此为了保证本文仿真的结果更接近航海实际情况, 可把舵机伺服系统构建成如图 3所示的结构, 并将育鲲轮舵机的时间常数Te=2.8, 舵机输入增益Ke=1, 而舵角限制设为30°。而控制器参数设置如下λ1=60.012 9, λ2=0.015 5, λ3=0.01, μ1=100, ρ1=ρ2=ρ3=0.001, ε1=ε2=ε3=10。

|
| 图 3 舵机伺服系统的仿真框图 |
在海上航行时, 高频海浪对船舶航向控制系统的输入干扰是引起船舶偏航的主要原因。其中三维不规则波从海浪本质和机理的角度进行仿真, 比目前船舶运动控制系统研究和设计中普遍采用二维不规则波, 从仿真结果的可信度来说具有无可比拟的优越性, 因此本文将采用三维不规则波进行船舶航向控制系统的仿真模拟。
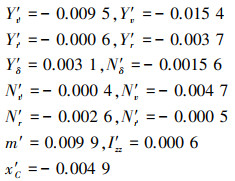
采用合田改进JONSWAP波浪频谱如(33)式所示

|
(33) |
式中,γ为频谱参数, 计算时取
|
海浪方向函数如(34)式所示

|
(34) |
采用双叠加法模拟多向不规则波, 即把多向不规则波的波能同时分布在一定频域和方向范围内, 并把频域范围分成M份, 方向分割成I份, 同时把每个单元的波看出简谐波, 其振幅表达式为

|
(35) |
式中,s(ωmi, θi)=s(ωmi)·G(ωmi, θi), Δθ=(θmax-θmin)/I, Δω=(ωH-ωL)/M, 最后利用(36)式进行多向不规则波的数值计算。
|
(36) |
式中, ωmi为波浪的角频率, 其值可取

|
式中, RANmi为(0, 1)范围内的随机数。
假定仿真时平均海浪周期Tw=8 s, 海浪的有义波高h1/3=3 m, 主浪向为0°, 则可得到如图 4所示的多向不规则波浪面仿真结果。为了说明本文如图 4所示的多向不规则波可以很好地模拟合田改进的JONSWAP波浪谱, 将不规则波原点处的波面序列进行傅里叶变换, 并将得到的波浪谱与(33)式的目标波浪谱进行对比, 得到如图 5所示的结果从图中可以看出2条曲线吻合度非常高, 表明本文所使用的多向不规则波的正确性。

|
| 图 4 多向不规则波波浪面图 |

|
| 图 5 不规则波目标谱与计算谱对比 |
我们设定船舶的初始航向为0°, 目标航向为40°, 坐标轴的原点为船舶的重心点。根据公式(37)和如图 6所示的“育鲲轮”型线图计算船舶转艏向对波浪的响应, 则得到船舶所受到的航向干扰, 如图 7所示。

|
| 图 6 “育鲲轮”型线图 |

|
| 图 7 在多向不规则波下的航向响应曲线 |

|
(37) |
式中, B和L分别表示为船舶的船宽、船长, ρw表示海水密度。
3.3 控制仿真与对比实验为了验证本文控制策略的有效性,本文所提出控制器的控制效果将与一些经典的航向控制器设计策略进行对比,包括:经典PD控制器和极点配置控制器进行对比仿真。
1) 经典PD控制器
PD作为经典的控制器设计方法, 很早就被广泛应用于船舶控制领域中, 其控制器设计策略如(38)式所示
|
(38) |
本文将采用文献[15]中的参数, 即Kp=0.9, Kd=0.2。
2) 极点配置(PP)控制器
本文还将一种具有附加自由度的极点配置方法进行尝试使用, 其控制器的结构如(39)式所示
|
(39) |
式中, Kc=ω0/KR, Tc=2ζ+1/ω0, T′c=TR, T0=1/(2ζω0+ω0), ω0=0.9, ζ=0.1。
3) 控制器性能对比与分析
前面所述的几种方法都是非常实用可用于实际的算法,将上述的几种控制算法代入到本次设计的航向控制系统中,通过MATLAB仿真并将结果绘制在同一坐标系中,并将不同的控制方法用不同的线型标出,其航向控制性能如图 8所示。图 9为舵机舵角的控制响应图,这2张图所表示的方面即可以很好地衡量船舶航向控制的性能。

|
| 图 8 航向控制性能对比图 |

|
| 图 9 舵角控制性能对比图 |
为了精确地评价控制器性能,定义控制器的控制效果综合评价指标CPEI(control performance evaluation index),其包括4个带权值的评价参数,分别为动态绝对平均误差值MAED(mean absolute error of dynamic),动态绝对输入值MAID(mean absolute input of dynamic),静态绝对平均误差值MAES(mean absolute error of static),以及静态绝对输入值MAIS(mean absolute input of static)为静态绝对输入值,根据本文的仿真试验结果,将仿真中的前500 s作为控制器动态性能评价时间,而后500 s作为控制器静态性能的评价时间。
其中动态绝对平均误差值MAID的计算方法如(40)式所示
|
(40) |
式中,|ψi|为所采样航向角的绝对值n为采样点个数, 这里n=500。静态绝对输入值MAES计算方法如(41)式所示
|
(41) |
式中,ψi为采样点的航向值, ψr为目标航向值, 这里取ψr=20, n=500, (42)式为动态绝对输入值和静态绝对输入值的计算方法

|
(42) |
式中,|δi|为舵角的采样值的绝对值。
在计算完各个参数后综合性能指标CPEI的计算如(43)式所示

|
(43) |
式中,综合指标CPEI为各性能指标乘以各自的权值求和后所得的结果, 权值的计算采用归一化处理方法, 即将每项指标的数据相加求和并被最小公倍数相除所得, 经计算得γ1=3, γ2=14, γ3=168, γ4=84。同时上升时间RT(rising time)作为一种非常重要的控制性能动态评价指标, 虽然没有列入到CPEI的计算中, 但也在表 2中列出来, 用来评价不同控制器的动态性能。采用本文的评价指标来分析各个控制器的动态性能和静态性能可以全面地反映各控制器的优缺点, 也符合实际控制工程的要求。
| 方法 | 动态性能 | 静态性能 | CPEI | |||
| RT | MAED | MAID | MAES | MAIS | ||
| 本文 | 162 | 17.08 | 3.398 | 0.002 | 0.357 | 129 |
| PD | 159 | 18.60 | 3.617 | 0.974 | 0.297 | 289 |
| PP | 128 | 19.95 | 5.828 | 0.082 | 1.734 | 297 |
| 归一化权值 | 3 | 14 | 168 | 84 | ||
从上升时间来看PP控制器的优势在于上升时间短,响应速度快,本文所提出的控制方法虽然和PP控制器相比有一定的差距但也都能达到不错的效果。从MAED参数的角度考虑,可以看出本文所提出的算法在该项性能指标上表现良好,而在上升时间上占据绝对优势的PP控制器在该数据上则显得有些不足,传统PD控制器表现也不是很好。对于MAID参数而言,PP控制器在该项性能上表现不佳,本文所提出的控制器和传统PD控制器在此项指标上展现出了优势。
前面所述为权重较小的动态指标而下面这两个指标则为所占权重较大静态指标MAES,用于衡量船舶航向保持时的浮动量。其中PD控制器和PP控制器在该项指标上有不错的控制效果,而本文所提出的控制器设计方法在该项指标中则以绝对的优势取胜。MAIS用于衡量船舶航向保持时的舵机工作幅度,相对较小的值可以很好的节省舵机,其中传统PD算法在该项指标中有其独特的优势,PP控制器和PD控制器相比有一定的差距,本文所提出的控制器和传统PD控制器差距不大,表现也是十分出色。
综上可以看出几种控制器都有着其独特的优势,也有着其不可取代的位置,不同的应用场合可以运用不同的算法,但就综合指标CPEI而言,可以看出本文所提出的控制方法提升了船舶航向控制器的控制性能,在无人船规划控制系统中具有非常好的应用潜力。
4 结论本文针对船舶航向控制问题进行了研究, 提出了一种基于闭环成形滤波概念的L2增益非线性鲁棒控制算法。主要结论如下:
1) 利用了Lyapunov设计严谨的特点, 将闭环成形滤波概念引入到L2增益非线性鲁棒控制器设计中, 把时域和频域控制器设计理念相融合, 从实际应用的角度出发, 成功地设计了规划控制策略下的非线性船舶航向反馈控制器。
2) 选取大连海事大学的“育鲲”轮为例进行仿真验证, 并和几种常见的可应用于实际控制方法在多向不规则波条件下进行仿真对比研究, 仿真效果与航海实际更加符合。最终的实验结果表明几种常见的控制方法在其某些方面确有不可取代的位置, 但也都有一定的不足。而本文所提出的方法综合性能更好。
3) 本文所设计的非线性控制器结构简捷高效, 控制器参数物理意义明确, 可以在提高控制器精度的同时不过多增加控制器的计算复杂度, 是船舶自主航行规则控制策略中底层航向反馈控制模块非常好的一种选择, 具有非常好的实际应用潜力。
| [1] | LOKUKALUGE P P, VICTOR F F P. SANTOS, et al. Experimental Evaluations on Ship Autonomous Navigation and Collision Avoidance by Intelligent Guidance[J]. IEEE Journal of Oceanic Engineering, 2015, 40(2): 374-387. DOI:10.1109/JOE.2014.2304793 |
| [2] |
罗伟林, 邹早建, 李铁山. 船舶航向非线性系统鲁棒跟踪控制[J]. 控制理论与应用, 2009, 26(8): 893-895.
LUO Weilin, ZOU Zaojian, LI Tieshan. Robust Tracking Control of Nonlinear Ship Steering[J]. Control Theory & Applications, 2009, 26(8): 893-895. (in Chinese) |
| [3] | DU J, ABRAHAM A, YU S, et al. Adaptive Dynamic Surface Control with Nussbaum Gain for Course-Keeping of Ships[J]. Engineering Applications of Artificial Intelligence, 2014, 27(1): 236-240. DOI:10.1016/j.engappai.2013.08.013 |
| [4] | ZHANG X, ZHANG G. Design of Ship Course-Keeping Autopilot Using a Sine Function-Based Nonlinear Feedback Technique[J]. Journal of Navigation, 2016, 69(2): 246-256. |
| [5] | ZHANG Q, ZHANG X K, IM N K. Ship Nonlinear-Feedback Course Keeping Algorithm Based on Mmg Model Driven by Bipolar Sigmoid Function for Berthing[J]. International Journal of Naval Architecture & Ocean Engineering, 2017, 9(5): 525-536. DOI:10.1016/j.ijnaoe.2017.01.004 |
| [6] | Piotr Borkowski, Zenon Zwierzewicz. Ship Course-Keeping Algorithm Based on Knowledge Base[J]. Intelligent Automation & Soft Computing, 2011, 17(2): 149-163. |
| [7] | LIU Z, GU W, GAO D. Ship Course Keeping Using Eigenvalue Decomposition Adaptive Sliding Mode Control[C]//Techno-Ocean, 2017: 687-691 |
| [8] | DO K D, JIANG Z P, PAN J. Underactuated Ship Global Tracking Under Relaxed Conditions[J]. IEEE Trans on Automatic Control, 2015, 47(9): 1529-1536. |
| [9] | NICOLAU V, MIHOLCA C, AIORDACHIOAIE D, et al. QFT Autopilot Design for Robust Control of Ship Course-Keeping and Course-Changing Problems[J]. Journal of Control Engineering & Applied Informatics, 2006, 7(1): 50-54. |
| [10] | LIU S, YU P, LI Y Y, et al. Application of Hinfinite Control to Ship Steering System[J]. Journal of Marine Science and Application, 2006, 5(1): 6-11. DOI:10.1007/s11804-006-0041-8 |
| [11] | DAS S, BHATT A, TALOLE S E. UDE Based Backstepping Design for Ship Autopilot[C]//International Conference on Industrial Instrumentation and Control, 2015: 417-422 |
| [12] | LEI Z, GUO C. Disturbance Rejection Control Solution for Ship Steering System with Uncertain Time Delay[J]. Ocean Engineering, 2015, 95: 78-83. DOI:10.1016/j.oceaneng.2014.12.001 |
| [13] |
张显库, 贾欣乐. 船舶运动控制[M]. 北京: 国防工业出版社, 2006.
ZHANG Xianku, JIA Xinle. Ship Motion Control[M]. Beijing: National Defence Industry Press, 2006. (in Chinese) |
| [14] | DU P, OUAHSINE A, TOAN K T, et al. Simulation of Ship Maneuvering in a Confined Waterway Using a Nonlinear Model Based on Optimization Techniques[J]. Ocean Engineering, 2017, 142: 194-203. DOI:10.1016/j.oceaneng.2017.07.013 |
| [15] | FAN Y, MU D, ZHANG X, et al. Course keeping Control Based on Integrated Nonlinear Feedback for a USV with Pod-Like Propulsion[J]. Journal of Navigation, 2018: 71. |
2. State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian 116023, China
