

微型飞行器在军民用领域都具有极大的潜力和价值[1-2]。20世纪90年代以来, 由于灵活多样用途特殊, 微型飞行器备受关注, 其技术研究已取得了较大进步[3-4], 但受限于微机电技术的发展水平, 目前, 航时和航程不足已成为制约微型飞行器性能发挥的瓶颈之一。
常规的微型飞行器依靠微型电机进行有动力飞行, 但是有限的能源使其难以有效续航。美国海军实验室(Naval Research Laboratory, United States)于2012年提出一种微型飞行器的新式应用方法, 并将其命名为CICADA(close-in covert autonomous disposable aircraft)。区别于传统微型飞行器的动力飞行方式, CICADA去掉了动力装置, 仅携带基本控制元件和任务传感器。其原理样机被挂于Tempest无人机的机翼下方, 由高空气球作为载具将Tempest无人机携带到2万米高空进行释放。飞行一段时间后, CICADA脱离Tempest无人机, 全程依靠滑翔的方式完成到预定地点的精确着陆[5]。CICADA成本较低, 结构简单, 一次可从平流层大量投放, 具有执行多种特定任务的能力。其原理样机已经经过多次优化及测试[6]。事实上, 国内外平流层投放飞行器的研究越来越受到重视。如德国宇航中心于瑞典基律纳发放场进行的平流层常规布局滑翔机投放验证了平流层投放技术的可行性及控制算法的精确性[7]。但是现有的研究大多面向常规布局中大型尺寸滑翔飞行器, 而对平流层投放的微型飞行器缺乏系统性研究。
目前, 轨迹优化分析是滑翔飞行器研究的重要方面, 文献研究多针对大质量高速飞行器, 如导弹、返回舱或航天飞机[8-11]等。而对于平流层投放的微型滑翔飞行器来说, 由于其概念较为新颖, 目前其滑翔轨迹优化方面的系统性研究还有待深入。
本文参照常规航天飞行器再入方程, 概述了微型滑翔飞行器(MGAV)的设计过程。基于微型滑翔飞行器总体设计要求及参数, 分析其一般意义下的平衡滑翔和真实滑翔轨迹特性。并针对潜在的目标需求, 应用高斯伪谱法对运动方程进行离散处理, 完成对2种可能的任务需求的最优轨迹设计。最后针对最优控制变量进行反解验证了高斯伪谱法对于最优轨迹求解的可行性和高效性。
1 MGAV设计概述 1.1 总体设计思路与设计过程滑翔式微型飞行器的最终目标是携带载荷完成由高空到预定地点的精确着陆。其设计需要在完成任务的同时, 具有较好的隐蔽性, 因此对飞行器尺寸进行了约束。并且, 由于该飞行器不再回收, 在设计时还需要考虑到成本低廉及结构简单等因素。为此, 该飞行器展长被限制在35 cm之内以增强隐蔽性。并且, 为了增大翼载荷以降低滑翔时的速度, 该飞行器采用飞翼布局, 翼面积为0.04 m2, 展弦比在2以内。
根据上述设计思路, 决定直接以电路板作为机翼以达到降低成本和快速批量制造的目的。根据文献[13]的证明, 飞行器在以最大升阻比滑翔时可以达到最远滑翔距离。根据这一结论, 在翼面积及展弦比约束下设计可以使飞行器达到最佳升阻比的翼面形状。由于使用电路板制作机翼, 飞行器将采用典型的薄翼平板翼型。整个下滑过程中, 飞行雷诺数较低。文献[14-17]通过实验详细研究了有限展弦比不同翼面形状的平板翼型机翼在低雷诺数下的气动性能, 见表 1。
| 形状 | 展弦比 | 最大升阻比 |
| 矩形 | 1 | 5.6 |
| 1.5 | 6.2 | |
| 2 | 6.7 | |
| 后掠翼 | 4(λ=1) | 6.1(30°) |
| 4(λ=1) | 7.5(45°) | |
| 4(λ=1) | 4.7(60°) | |
| 梯形直翼 | 2(λ=0.75) | 6.8 |
| 齐默曼 | 1 | 6.4 |
| 1.5 | 6 | |
| 2 | 6.7 | |
| 反齐默曼 | 1 | 5.7 |
| 1.5 | 6.2 | |
| 2 | 6.9 | |
| *λ为根梢比 | ||
在满足上述展弦比要求的前提下, 反Zimmerman形状在所有构型中有着最大升阻比。因此, 飞行器构型确定为展弦比为2的反Zimmerman形状平板翼型机翼。将控制元件、电池、天线及载荷直接沿电路板中心线区域焊接, 保证整机质量的对称性。在电路板其他没有电路引线的区域对称地开多个减重孔以减轻整机重量。使用3D打印技术制造轻质机身用于对整个电路区域做整流和保温。使用2个升降副翼控制飞行器航向。使用双垂尾布局增强偏航稳定性。整机的制造, 包括机翼的切割、电路元件焊接、机身打印均为自动化生产, 最后手动完成各个部件间的装配。最后经过核算的飞行器总质量约为160 g, 翼载荷小于40 N/m2, 符合一般设计经验[12]。图 1展示了研究室自主研制的MGAV其中一版构型原理样机实物图。

|
| 图 1 自主研制MGAV原理样机 |
对于有限展长平板翼型机翼的升力系数, 可采用Plohamus[21]公式, 其表述如下

|
(1) |
式中, Kp根据不同的气动布局有特定的取值。文献[14]根据实验数据给出针对展弦比为2的反齐默曼形状Kp取值为2.65;Kv=π; α为飞行器攻角。
对于阻力系数的预测, 可应用如下经典公式[15]

|
(2) |
式中, CD0在这里取值为0.015;K为诱导阻力系数, 其根据不同气动布局取值不同[14]。这里K对于所述布局取值为0.355。表 2总结了此版自主设计MGAV总体参数。
| 参数名 | 数值 |
| 机翼质量/g | 120(包含电路) |
| 机翼展长/cm | 32 |
| 机翼展弦比 | 2 |
| 机翼平均气动弦长/cm | 12 cm |
| 机翼翼面形状 | 反齐默曼 |
| 机翼最大升阻比 | 6.85 |
| 机翼纵向静稳定裕度/% | 11 |
| 机身质量/g | 40(包含舵机、连杆、电池及装配零件等) |
| 机身尺寸 | 12 cm×45 cm×25 cm |
在运动分析过程中, 为了得到一般意义下的下滑轨迹和参数, 在这里不考虑滑翔过程中突风的影响。并且, 做出如下应用通常意义下的假设:①假设地球为均匀球体且由于再入时间较短, 忽略自转。②飞行器控制系统设计良好, 即再入段为平面运动。③飞行器绕质心运动为瞬时平衡, 即忽略绕质心的运动。基于以上假设并参考再入方程[18], 给出微型滑翔飞行器质心的平面运动方程和坐标系
|
(3) |
式中,V表示飞行器速度, θ表示速度倾角(下滑角), r表示飞行器质心到地心的距离, R表示射程(滑翔距离), H表示飞行器质心到地面的垂直距离。Re, m和g分别表示地球半径、飞行器质量和当地重力加速度。L=0.5ρV2SCL, D=0.5ρV2SCD分别表示飞行器升力和阻力。其中, CL和CD表示飞行器的升力和阻力系数, 其为攻角的函数。ρ和S分别表示当地大气密度和飞行器的参考面积。坐标系如图 2所示。

|
| 图 2 平面再入坐标系变量关系 |
对于大气密度, 这里采用根据国际标准大气简表数值拟合而成的公式得到和高度的关系

|
(4) |
对于滑翔式微型飞行器来说, 其最理想的滑翔轨迹是无波动的平稳下滑飞行, 即平衡滑翔。假设微型飞行器从弹射器脱离时刻开始即进入到稳定的下滑轨道, 这对于一个已经确定设计参数的飞行器, 一定存在一种初始条件使其在不同高度可以在全程保持平衡滑翔状态, 其推导过程如下:
由平衡滑翔定义可知, 当飞行器平衡滑翔时, 升力与重力相等或极为接近。由此可近似下滑角θ为一可忽略小量, (3)式中第二式dθ/dt≈0, cosθ≈1。因此(3)式第二式可改写为
|
(5) |
通过(5)式可求出平衡滑翔时初始时刻需要的速度Vinitial。(5)式对ρ求导可得
|
(6) |
对(3)式第一式左边项进行改造可得
|
(7) |
对(7)式dρ/dt进行改造可得
|
(8) |
dρ/dH的函数关系可由密度高度关系拟合公式(4)给出, 将其带入(8)式并将(6)式与(8)式代入公式(7)可得
|
(9) |
在高度、密度和初始速度已知的情况下则可通过(9)式求解出平衡滑翔条件下的初始速度倾角。由公式(5)与(9)计算得到在MGAV设计高度20 km下平衡滑翔条件为:Vinitial=74.62 m/s, θinitial=-3.97°。而对于地面弹射, 此速度仅需约18 m/s。
2.3 实际滑翔投射条件在此版设计中, 滑翔式微型飞行器采用由高空气球所携带的弹射装置在高空对其进行发放。弹射装置主要由导轨、滑块及弹簧组成。飞行器和滑轮一体, 在发放前滑轮放于导轨顶部压缩弹簧, 飞行器整体由挡板卡住固定。发放时上部挡板打开, 飞行器由弹簧推动沿滑轨下冲, 脱离滑轨后进入滑翔状态。弹射装置及飞行器发放前的受力状态可以简化成图 3形式。其中, 导轨全长为L, 导轨与当地水平线夹角为θ, 滑块与导轨的摩擦因数为μ。Fe, Fd, Fn分别为弹簧力、摩擦力和支撑力。

|
| 图 3 飞行器投射受力分析简图 |
推导滑块的运动方程以估算其脱离速度, 由于垂直于导轨方向的力始终平衡, 所以只需列出平行于导轨方向的运动学方程, 其形式如下

|
(10) |
式中,k为弹簧刚度。方程(10)属于二阶非齐次常微分方程, 带入初始条件:x(0)=0, ẋ(0)=0则可以求出其理论解为

|
(11) |
对于真实应用于此种微型飞行器投射的装置参数, 导轨全长L=0.6 m, k=200 N/m, m=200 g, θinitial=40°, μ=0.1。图 4给出了飞行器经过滑轨加速的滑翔初始速度。经过0.05 s后飞行器速度被加速到约18 m/s脱离滑轨进入滑翔状态。

|
| 图 4 飞行器加速状态 |
由上述对真实投射装置的分析可以看到, 弹射器的加速能力只能保证无人机在地面的平衡滑翔条件, 而20 km高空时离上述平衡滑翔初速度仍相距较大。但考虑到滑轨将无人机在上升时全程约束在一固定姿态, 可保证无人机投射时姿态的稳定, 因此在这一版设计中仍然保留弹射机构。图 5分别给出了由四阶Runge-Kutta法求解的最大升阻比下平衡滑翔条件和真实投射条件的无约束运动状态。

|
| 图 5 最大升阻比下平衡滑翔与真实投射轨迹比较 |
满足平衡滑翔投射条件, 整个运动轨迹在全程下滑平缓, 而真实的投射由于速度远低于平衡滑翔初始速度, 运动轨迹会在初始段变成跳跃式, 但是这种初始段的跳跃很快衰减成平稳下滑。平衡滑翔和真实低速投射状态的下滑轨迹相比具有更远的射程, 这是由于较高的速度等效于给滑翔注入了更多的动能。同样, 飞行器真实投射状态下的速度和下滑角在初始段的运动状态和平衡滑翔相比波动更剧烈, 但是其会迅速衰减到和平衡滑翔一样的运动状态直到落地。采用无约束最大升阻比滑翔的飞行方式, 在上述真实投射条件下, 着陆速度约为20 m/s, 着陆时速度倾角约为-8°, 最大滑翔距离136 km, 全程耗时约1h15min。
3 滑翔轨迹优化 3.1 高斯伪谱法前文对于下滑轨迹的分析基于使飞行器达到最远滑翔距离这一要求, 既使攻角固定在最大升阻比攻角。但在真实飞行任务中, 其具体目标会随着任务需求而改变, 此时需要通过控制使飞行目标最优化。对于最优控制问题, 用(12)式表示使其达到的性能指标

|
(12) |
求解上述最优控制问题较为困难, 但伪谱法可将动力学方程的解表示为某种有限个基函数的和, 通过确定相应基函数的系数以保证在给定的有限个配点上等于真解从而求解动力学方程近似解。其中, 高斯伪谱法数学概念清晰, 所求KTT条件完全等价于高斯伪谱法离散连续Bolza问题的一阶必要条件所得到的离散化形式。高斯伪谱法可直接通过估算物理概念的初始条件从而避免勒让德伪谱法中猜测协状态的初始值, 降低了难度。并且, 微分形式下的高斯伪谱法由于矩阵稀疏, 通过适当算法可极大提高求解速度, 在局部收敛速率呈指数阶增长。高斯伪谱法的离散化节点分布在区间[-1, 1]上, 因此需要引入新的时间变量下τ进行变量变换, 变换式如下
|
(13) |
性能指标(12)式经过转化可变为区间[-1, 1]上的标准形式

|
(14) |
构造N阶Lagrange插值多项式

|
(15) |
式中,
利用Li(t)的代数和, 可以构造任一函数f(t)在[-1, 1]上的一个N阶多项式形式的逼近函数
|
(16) |
则f(t)的积分可由(16)式的逼近函数替换

|
(17) |
式中,
同样f(t)的导数同样可由(16)式的逼近函数替换

|
(18) |
其在配点ti处满足
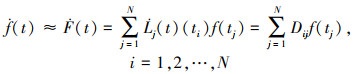
|
(19) |
式中

|
应用(17)式将性能指标函数(14)式离散化为

|
(20) |
同样应用导数(19)式在配点上将动力学状态方程离散化为
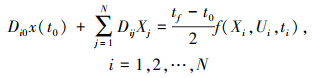
|
(21) |
上式的离散化只针对配点, 而对于两端点有

|
(22) |
过程约束和终端约束可离散化为

|
(23) |
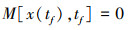
|
(24) |
前文针对平衡滑翔投射条件和真实滑翔投射条件所得到的轨迹是一条无约束最远射程轨迹。对于其结果分析可以看到, 其落地时速度较快, 可能在落地时对飞行器造成损坏。并且在真实飞行任务中, 可能针对不同任务性质提出不同需求。在这里针对2种可能的需求使用高斯伪谱法研究最优滑翔轨迹特性。
第一种需求考虑目标函数为滑翔最长时间。此种任务需求对应于要求飞行器在滑翔过程中尽可能长的携带载荷完成空中任务的执行。并且考虑终端约束, 即落地时的终端速度小于10 m/s以减小其冲击力并且下滑角为0°使其可以平缓落地。目标函数表达如下:
性能指标:minJ=-tf
终端约束:Vf=10 m/s, θf=0°
第二种需求考虑其目标函数下滑时间最长的同时滑翔距离最远。此种任务需求对应于使载荷可以在降落的最远距离且同时尽可能长地停留在空中执行任务。并且在上述终端约束的条件下再加上滑翔时的过程约束, 即全程最大速度不大于50 m/s以减小可能的盘旋下降半径。其表达如下:
性能指标:minJ=-(tf+Rf)
过程约束:V≤50 m/s
终端约束:Vf=10 m/s, θf=0°
对于这两种需求, 其控制变量攻角的约束相同, 表达式如下:
控制约束:0°≤α≤16°
攻角的约束是基于文献[14-16]中对于不同平板翼型最大失速攻角的研究, 对于展弦比为2的平板翼型, 有效攻角小于16°。高斯伪谱法离散时配点数N取10对这2种目标的最优轨迹进行求解。
图 6给出了上述2种任务需求的高斯伪谱法优化结果。可以看到:对于第一种追求最长航时任务需求, 首先, 攻角作为控制变量仍然在绝大部分时间保持稳定, 但是稳定值7°要高于追求最远射程时的攻角4°。其次, 追求最长航时下的射程为116 km, 小于在最大升阻比下滑翔的最远射程136 km, 既追求了最远航时, 则其攻角所对应的升阻比不再是最大升阻比, 所以其射程会下降。由于追求最长下滑时间, 其航时比最远射程的时间增加了约8 min。最后, 对于终端约束, 主要体现在在最后着陆段0.6 km高度迅速增大飞行器的攻角到约13°, 从而减少冲击速度和角度, 使其满足着陆时的安全限制, 保护内部载荷。

|
| 图 6 2种性能指标下仿真优化结果 |
对于第二种任务需求, 同时追求最远航时和最远射程, 可以看到:得到的最优轨迹最远射程与理论最远射程极为接近, 且航时也要比单纯追求最远射程长2 min。并且, 由于在此种需求中增加了对于最大速度的过程约束, 攻角作为控制量, 在初始段由一个较大的值逐渐减小以控制速度在初始段不大于50 m/s, 如图 6c)~6e)所示。如果不增加速度约束, 则其在初始段的最大速度峰值会超过80 m/s。在高度下降到约15 km时, 攻角趋于稳定不再减小, 稍高于追求最远航程时的攻角。着陆段同样在0.6 km时迅速增大攻角到约14°以提供安全限制。
3.3 优化结果可行性验证前文优化结果是原问题使用Lagrange插值多项式近似后的离散解, 对于其可行性还需进行进一步验证。具体为将得到的控制变量作为输入带入到原动力学方程式(3)中进行积分, 比较积分后的结果和优化结果之间的误差。图 7展示了对上述第二种需求优化结果的验证, 可以看到其积分结果和优化结果吻合良好, 误差在合理范围内, 说明高斯伪谱法求解的最优控制变量是可行的。

|
| 图 7 优化结果可行性验证 |
本文对一种新出现的滑翔式微型飞行器进行了轨迹的分析和优化, 结论如下:
1) 对于无约束最大升阻比飞行(4°攻角), 初始投射状态满足平衡滑翔状态, 则下滑轨迹平缓, 但是真实投射装置无法达到平衡滑翔要求, 因此真实投射状态会使滑翔轨迹在初始段造成跳跃, 但是跳跃轨迹很快衰减成稳定的平衡滑翔状态。真实滑翔距离要比平衡滑翔距离少5 km。
2) 以最远航时为性能指标的优化轨迹在航时上要高于以最远射程为目标的航时约8 min, 但是射程会缩短约20 km。攻角在全程基本保持稳定在7°。以最远射程和最长航时同时为性能指标的优化轨迹在射程上接近理论最远射程136 km, 且高于原航时2 min。由于在过程约束中施加了速度约束, 攻角在初始段由大逐渐减小以控制全程速度不超过50 m/s。终端约束体现在当下降到0.6 km高度时开始迅速提高攻角到约13°以减缓速度和速度倾角。
3) 验证结果显示, 高斯伪谱法得到的优化轨迹具有良好的可行性。但是在实际计算过程中, 高斯初值和配点数的选取会对计算效率和收敛性产生影响。
| [1] |
肖永利, 张琛. 微型飞行器的研究现状与关键技术[J]. 宇航学报, 1992, 18(5): 585-589.
XIAO Yongli, ZHANG Chen. Study on Present Situation and Development of Micro Air Vehicles[J]. Journal of Astronautics, 1992, 18(5): 585-589. (in Chinese) |
| [2] | HUNDLEY R O, GRITTON E C. Future Technology-Driven Revolutions in Military Operations[R]. DB-110-ARPA, 1994 |
| [3] | WASZAK M R, DAVIDSON J B, IFJU P G. Simulation and Flight Control of an Aeroelastic Fixed Wing Micro Aerial Vehicle[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit, Monterey, CA, 2002 |
| [4] | GRASMEYER J, KEENNON M. Development of the Black Widow Micro Air Vehicle[C]//AIAA 39th Aerospace Sciences Meeting and Exhibit, Reno, NV, 2001 |
| [5] | KAHN A, EDWARDS D. Navigation, Guidance and Control for the Cicada Expendable Micro Air Vehicle[C]//AIAA Guidance, Navigation and Control Conference, 2012 |
| [6] | EDWARDS D J, KAHN A D, HEINZEN S B, et al. CICADA Flying Circuit Board Unmanned Aerial Vehicle[C]//2018 AIAA Aerospace Sciences Meeting, 2018 |
| [7] | LAIACKER M, WLACH S, SCHWARZBACH M. DLR High Altitude Balloon Launched Experimental Glider(Hableg): System Design, Control and Flight Data Analysis[C]//Workshop on Research, 2016 |
| [8] |
闫晓东, 唐硕. 基于伪谱法的亚轨道飞行器返回轨迹优化设计[J]. 西北工业大学学报, 2010, 28(5): 748-752.
YAN Xiaodong, TANG San. Applying Pseudo-Spectral Method to Optimizing Entry Trajectory of Suborbital Launch Vehicle[J]. Journal of Northwestern Polytechnical University, 2010, 28(5): 748-752. (in Chinese) DOI:10.3969/j.issn.1000-2758.2010.05.021 |
| [9] |
陈小庆, 侯中喜, 刘建霞. 高超声速滑翔飞行器弹道特性分析[J]. 导弹与航天运载技术, 2011(2): 5-9.
CHEN Xiaoqing, HOU Zhongxi, LIU Jianxia. Trajectory Characteristic of Hypersonic Gliding Vehicle[J]. Missiles and Space Vehicles, 2011(2): 5-9. (in Chinese) DOI:10.3969/j.issn.1004-7182.2011.02.002 |
| [10] |
李广华, 张洪波, 汤国建. 高超声速滑翔飞行器典型弹道特性分析[J]. 宇航学报, 2015, 36(4): 397-403.
LI Ghuanghua, ZHANG Hongbo, TANG Guojian. Typical Trajectory Characteristics of Hypersonic Glide Vehicle[J]. Journal of Astronautics, 2015, 36(4): 397-403. (in Chinese) DOI:10.3873/j.issn.1000-1328.2015.04.005 |
| [11] |
高显忠.基于重力势与风梯度的太阳能飞行器HALE问题研究[D].合肥: 国防科学技术大学, 2014 GAO Xianzhong. Research on High-Altitude Long-Endurance Flight of Solar-Powered Aircraft Based on Gravitational Potential and Wind Shear[D]. Hefei, National University of Defense Technology, 2014(in Chinese) |
| [12] | SHKARAYEV S V, IFJU P G, KELLOGG J C, et al. Introduction to the Design of Fixed-Wing Micro Air Vehicles Including Three Case Studies[M]. American Institute of Aeronautics and Astronautics, 2007. |
| [13] | VINH N X. Optimal Trajectories in Atmospheric Flight[M]. New York: Elsevier Scientific Publishing Company, 1981. |
| [14] | TORRES G E, MUELLER T J. Low Aspect Ratio Aerodynamics at Low Reynolds Numbers[J]. AIAA Journal, 2004, 42(5): 865-873. DOI:10.2514/1.439 |
| [15] | PELLETIER A, MUELLER T J. Low Reynolds Number Aerodynamics of Low-Aspect-Ratio, Thin/Flat/Cambered-Plate Wings[J]. Journal of Aircraft, 2012, 37(5): 825-832. |
| [16] | ANANDA G K, SUKUMAR P P, SELIG M S. Measured Aerodynamic Characteristics of Wings at Low Reynolds Numbers[J]. Aerospace Science and Technology, 2015, 42: 392-406. DOI:10.1016/j.ast.2014.11.016 |
| [17] | OKAMOTO M, AZUMA A. Aerodynamic Characteristics at Low Reynolds Numbers for Wings of Various Planforms[J]. AIAA Journal, 2011, 49(6): 1135-1150. DOI:10.2514/1.J050071 |
| [18] | ZIPFEL P H. Modeling and Simulation of Aerospace Vehicle Dynamics[M]. American Institute of Aeronautics and Astronautics, 2007. |
| [19] |
韩子鹏. 箭弹外弹道学[M]. 北京: 北京理工大学出版社, 2014.
HAN Zipeng. Exterior Ballistics of Projectiles and Rockets[M]. Beijing: Beijing Institute of Technology Press, 2014. (in Chinese) |
| [20] | FERREIRA L O. Nonlinear Dynamics and Stability of Hypersonic Reentry Vehicles[D]. Michigan, University of Michigan, 1995 |
| [21] | POLHAMUS E C. Predictions of Vortex-Lift Characteristics by a Leading-Edge-Suction Analogy[J]. Journal of Aircraft, 1971, 8(4): 193-199. DOI:10.2514/3.44254 |
