

2. 上海航天技术研究院, 上海 201109;
3. 上海机电工程研究所, 上海 201109
未来武器高空高速的发展趋势对防空系统提出了更严峻的挑战,需要防空导弹从地面发射至20~30 km的高空对目标进行拦截防御。但随着高度的提升,特别是20 km以上,空气变得非常稀薄,导弹的气动舵效将会大幅下降,无法提供拦截所需的机动过载能力,从而导致防空导弹脱靶[1-2]。
目前国内外针对该问题的解决方案集中于增加直接控制力,并通过直接力/气动力复合控制的方式提升导弹的高空过载能力。文献[3]将气动力作为主要的输入,直接力作为辅助输入,复合控制采用模糊自适应的控制方法[3]。文献[4]将复合控制系统分为气动力和直接力2个子系统,气动力子系统是以过载跟踪的误差作为控制变量,直接力子系统是以过载跟踪误差及跟踪误差的变化率作为控制变量[4]。文献[5]采用了先进行气动力回路设计,再进行直接力回路设计的控制方案。气动力控制部分采用滑模变结构控制方法,直接力控制部分采用反步法求解[5]。研究成果表明,导弹过载响应的上升时间比单纯依靠气动力控制的响应时间下降一个数量级,能够在很大程度上提高导弹的控制系统的性能。
但从另一方面来考虑,气动力/直接力复合控制的代价是要在导弹上增加新的能源。如此,不仅增加全弹重量,挤压有效载荷空间,还会极大地提升导弹成本[6-7]。为此,本文提出了一种具有鸭舵/尾舵多操纵面的导弹复合控制方法。通过增加一组鸭舵,以提升导弹在高空飞行时的可用过载。该方案的优点在于鸭舵的控制效率高,铰链力矩小,能降低导弹跨声速飞行时过大的静稳定性,因此适用于跨空域、跨速域飞行的进攻或拦截武器。
本文拟基于导弹的小扰动线性化模型,构建鸭舵/尾舵复合控制系统,并采用序列二次规划法设计鸭舵/尾舵的复合分配策略,以保证导弹舵面效率最大化,从而满足跨空域、跨速域飞行的机动过载需求。
1 导弹数学模型 1.1 运动模型本文研究的导弹气动外形如图 1所示,导弹采用轴对称外形,有4片鸭舵和4片尾舵。俯仰通道和偏航通道采用鸭舵、尾舵联合控制,滚转通道采用尾舵控制。由于俯仰通道与偏航通道完全对称,因此本文仅在纵向平面进行建模和设计工作。

|
| 图 1 导弹气动外形 |
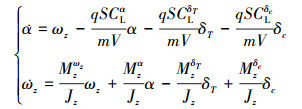
为简化弹体动力学模型,把导弹视为刚体,暂时忽略地球自转的影响。导弹纵向平面的数学模型如下:

|
(1) |
式中, ωz为俯仰角速度, Mz为俯仰力矩, Jz为俯仰方向的转动惯量, x, y为发射系坐标点, V为飞行速度, θ为弹道倾角, 
对导弹数学模型进行小扰动线性化, 简化条件为:
1) 采用系数冻结法,即取弹道上某一时刻t, 飞行速度V、高度H、推力P、质量m、转动惯量Jz均不变;
2) 攻角α为小量, 即sinα≈α, cosα≈1。
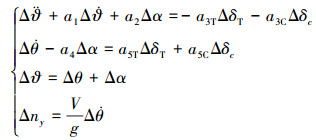
由此, 导弹动力学模型可线性化为
|
(2) |
式中, 导弹俯仰通道的空气动力阻尼系数a1=-Mzωz/Jz, 导弹的静稳定动力系数a2=-Mzα/Jz, 导弹的俯仰通道尾舵舵效率系数a3T=-MzδT/Jz, 导弹俯仰通道的鸭舵舵效率系数a3C=-Mzδc/Jz, 俯仰通道切线转动的角速度增量a4=qSCLα/mV, 俯仰通道尾舵舵面动力系数a5T=qSCLδT/mV, 俯仰通道鸭舵舵面动力系数a5C=qSCLδc/mV。
导弹纵向通道小扰动线性化模型为
|
(3) |
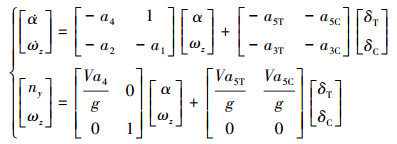
选取尾舵偏角δT和鸭舵偏角δc为输入, α和ωz为状态变量, ny和ωz为输出量, 可得导弹纵向状态空间的简化形式
|
(4) |
导弹鸭舵/尾舵复合控制系统结构如图 2所示:

|
| 图 2 鸭舵/尾舵复合控制系统结构 |
导弹纵向通道传递函数为

|
(5) |
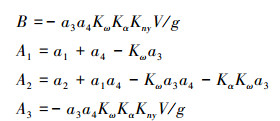
式中,a3=a3T-a3C, 过载回路闭环传递函数为

|
(6) |
式中
|
采用极点配置方法求取反馈控制增益Kω, Kα和Kny, 理想极点所对应的特征多项式为

|
(7) |
式中, ξ和ωd分别表征了理想极点所对应的阻尼比和频率。
将(6)式和(7)式中的系数对应相等, 可得控制器参数设计关系式
|
(8) |
俯仰通道舵指令为

|
其分配策略为
|
(9) |
本文采用序列二次规划法对鸭舵/尾舵分配系数进行优化设计, 使导弹阻力最小化的同时尽可能增大舵效, 以减小导弹在高空的过载损耗
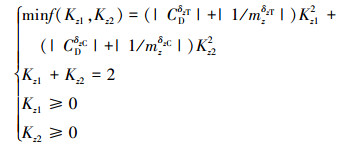
|
(10) |
|
(11) |
式中,X∈Rn是决策变量, f(X)是目标函数, gu(X), hv(X)分别是不等式约束函数和等式约束函数。
利用泰勒展开把非线性约束问题(11)式的目标函数在迭代点Xk简化成二次函数, 把约束函数简化成线性函数后得到的就是如下的二次规划问题
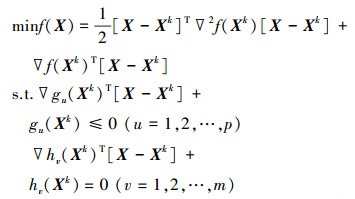
|
(12) |
此问题是原约束最优化问题的近似问题, 但其解不一定是原问题的可行点。为此, 令S=X-Xk, 将上述二次规划问题变成关于变量S的问题, 即
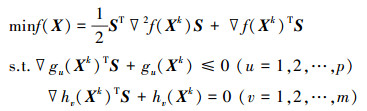
|
(13) |
令
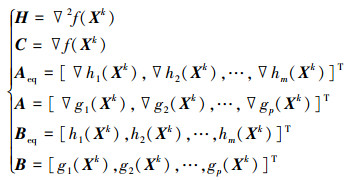
|
(14) |
将(13)式变成二次规划问题的一般形式, 即
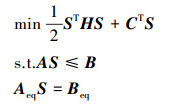
|
(15) |
求解此二次规划问题, 将其最优解S*作为原问题的下一个搜索方向Sk, 并在该方向上进行原约束问题目标函数的约束一维搜索, 即可得到原约束问题的一个近似解Xk+1, 反复迭代该过程, 直至求得最优解。
针对(10)式所描述的二次规划问题, 在各参数特征点(H, Ma, α), 采用序列二次规划法对分配系数进行优化设计, 具体流程为:
1) 给定初值S0=(Kz1, Kz2);
2) 求解(10)式所描述的二次规划子问题, 确定搜索方向dk;
3) 令Sk+1=Sk+dk, 判断Sk+1是否满足收敛条件。若满足, 则取最优解为S*=Sk+1, 停止计算; 否则返回2)继续迭代。
得到各参数特征点的最优解后, 利用增益调度技术构建全飞行包线内的鸭舵/尾舵复合分配策略
|
(16) |
为验证本文所设计控制方法的有效性,构建以下仿真场景:导弹以70°俯仰角从地面发射,加速爬升至30 km高度后定高巡航。仿真环境为Matlab/Simulink,仿真步长为0.001 s。仿真结果如图 3~8所示:

|
| 图 3 高度变化曲线 |

|
| 图 4 攻角变化曲线 |

|
| 图 5 法向过载变化曲线 |

|
| 图 6 鸭舵/尾舵舵偏角变化曲线 |

|
| 图 7 尾舵分配系数变化曲线 |

|
| 图 8 阻力变化曲线 |
从图 3可以看出,导弹从地面发射后进行稳步爬升,在30 km处能够迅速转平后进行定高巡航,几乎没有超调量。而从图 4可以看出,在高度转平时,攻角仅进行了一次半的大幅抖动后便迅速衰减,实现飞行姿态的稳定控制。这些都证明了控制系统具有良好的动态性能和稳态性能。
从图 5可以看出,在高度转平过程中,鸭舵/尾舵复合控制系统能够提供将近8g的瞬时过载,证明导弹即使在高空仍具备一定的机动能力。
从图 6可以看出,由于增加了一组鸭舵,在实现高空大过载机动时,鸭舵/尾舵系统的满偏时间非常短,并未导致控制系统发散。这证明增加鸭舵系统能够有效解决导弹在高空飞行时气动舵效不足导致的持续满偏问题。
从图 7可以看出,在导弹低空飞行时,由于空气密度较大,尾舵舵效高,因此规划的尾舵分配系数也较大。飞行至15 km左右时,随着空气密度减小,鸭舵舵效逐渐升高至与尾舵舵效相近,因此尾舵的分配系数逐渐减小至1附近。随着高度的继续升高,鸭舵舵效较大,因此尾舵分配系数小于1。这证明了本文序列二次规划的结果符合客观规律,具有很高的可信性。
从图 8可以看出,与工程上一般采用的1:1分配方式相比,本文采用序列二次规划法对舵指令进行优化分配后,能够有效减小导弹做机动过载时的阻力。这证明了本文设计的分配策略非常有效。
5 结论本文提出了具有鸭舵/尾舵多操纵面的导弹复合控制方法,并基于序列二次规划法设计了鸭舵/尾舵复合分配策略。通过仿真验证,证明了本文所设计的复合控制系统不但具有良好的动态特性和稳态特性,还能够保证导弹从低空低速到高空高速都具备高机动能力,同时也能够有效减小导弹做机动过载时的能量损耗。本文的研究为防空导弹的发展提出了一个新的方向,具有较高的应用价值和工程意义。
| [1] | YUN Yuhang, TANG Shengjing, GUO Jie, et al. Robust Controller Design for Compound Control Missile with Fixed Bounded Convergence Time[J]. Journal of Systems Engineering and Electronics, 2019, 29(1): 116-133. |
| [2] | CHAI Dong, FANG Yangwang, WU Youli, et al. Aerodynamic Force and Lateral Thrust Blended Control for Hypersonic Missile Using Fuzzy Control Algorithm[C]//34th Chinese Control Conference, 2015: 3567-3572 |
| [3] | WANG Zhengjie, LI Yangbo, LI Jing, et al. Modeling and Combined Control of Aerial Vehicle Based on Aerodynamic Force and Lateral Thrust[C]//The 2010 International Conference on Modelling, Identification and Control, 2010: 106-111 |
| [4] | SHI Z, MA W, ZHANG Y, et al. Lateral Thrust and Aerodynamics Compound Control System of Missile Based on Adaptive Fuzzy Control[C]//2012 Fifth International Symposium on Computational Intelligence and Design, 2012: 231-234 |
| [5] |
赵明元, 魏明英, 何秋茹. 基于有限时间稳定和Backstepping的直接力/气动力复合控制方法[J]. 宇航学报, 2010(9): 2157-2164.
ZHAO Mingyuan, WEI Mingying, HE Qiuru. Research on Method of Lateral Jet and Aerodynamic Fins Compound Control Based on Finite Time Stability and Backstepping Approach[J]. Journal of Astronautics, 2010(9): 2157-2164. (in Chinese) DOI:10.3873/j.issn.1000-1328.2010.09.015 |
| [6] |
刘凯, 宋晓娜, 刘跃敏, 等. 导弹复合控制系统的自适应控制器设计[J]. 火力与指挥控制, 2018, 43(5): 878-881.
LIU Kai, SONG Xiaona, LIU Yuemin, et al. Adaptive Control for Missile Compound Control Systems[J]. Fire Control & Command Control, 2018, 43(5): 878-881. (in Chinese) |
| [7] |
毕永涛, 王宇航, 姚郁. 直/气复合控制导弹的模型预测和自抗扰姿态控制设计[J]. 宇航学报, 2015, 36(12): 1373-1383.
BI Yongtao, WANG Yuhang, YAO Yu. Attitude Control Design of Missiles with Dual Control Based on Model Predictive Control and Active Disturbance Rejection Control[J]. Journal of Astronautics, 2015, 36(12): 1373-1383. (in Chinese) DOI:10.3873/j.issn.1000-1328.2015.12.005 |
| [8] |
易坚, 陈勇, 董新民, 等. 多操纵面交叉耦合的SQP控制分配策略[J]. 系统工程与电子技术, 2016, 38(11): 2617-2623.
YI Jian, CHEN Yong, DONG Xinmin, et al. SQP-Based Control Allocation for Multiple Effectors with Interactions[J]. Systems Engineering and Electronics, 2016, 38(11): 2617-2623. (in Chinese) DOI:10.3969/j.issn.1001-506X.2016.11.24 |
| [9] |
陈晓, 王新民, 周健. 基于序列二次规划法优化无人机飞行性能[J]. 计算机仿真, 2012, 29(12): 99-102.
CHEN Xiao, WANG Xinmin, ZHOU Jian. UAV Flight Performance Optimization Based on Sequential Quadratic Programming Method[J]. Computer Simulation, 2012, 29(12): 99-102. (in Chinese) DOI:10.3969/j.issn.1006-9348.2012.12.024 |
2. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China;
3. Shanghai Electro-Mechanical Engineering Institute, Shanghai 201109, China
