

2. 清华大学 航天航空学院, 北京 100084
无附面层隔道超声速进气道(diverterless supersonic inlet, DSI)是20世纪90年代由洛克希德马丁(Lockheed Martin,LMT)研制的一款超声速进气道,它通过在进气道入口部位设立一个固定的三维压缩面对将要进入进气道的超声速来流压缩整合,使得超声速来流通过内管道膨胀减速至亚声速。该固定的三维压缩面又被称为bump面,能通过增大压力分布的梯度使得附面层气流被排出进气道。相比传统超声速进气道,DSI进气道的重量更轻,并且在结构上与前机身相融合,能够有效降低飞行器前向雷达散射面积(radar cross section, RCS)数值。
作为一种新型进气道形式,有关DSI进气道的设计与优化研究相对较少。Kim[1-2]曾通过改变bump面的高度、长度和宽度这3个参数来研究bump面的曲面形状对进气道出口的总压恢复与总压畸变数值的影响。而更多的研究体现在对多种常规进气道的气动和隐身优化设计上。基于计算流体力学技术(CFD),科研人员针对不同构型的进气道优化设计开展了探索研究,以减小总压畸变提高总压恢复。Gaiddon等[3]采用遗传算法和CFD方法对超声速喷气导弹进气道的质量流量和总压恢复进行了优化设计研究。Zhang等[4]采用伴随优化的方法对蛇形进气道的曲率和截面进行修正,以减小进气道出口平面的畸变。Lee等[5]将高效全局优化方法(EGO)应用于计算成本较低的超声速进气道设计中。Kim等[6]将伴随的优化方法与RANS求解器相结合,对一架N2B翼身融合体飞机的嵌入式发动机进气道进行了机身阻力和风扇面流动畸变最小化设计。Gan等[7]采用替代多目标优化策略设计亚声速S弯管,流量畸变降低了16.3%,总压恢复提高了1.1%。在计算与分析腔体RCS方面,张鹏飞等[8]采用初值继承算法和前后向迭代结合的快速IPO方法研究了采用S弯管和在腔体内壁涂敷吸波材料对腔体RCS的缩减效果。郭文彦等[9]使用射线跟踪法(SBR)对矩形截面的直进气道和S弯进气道进行了计算与分析。
综合来看,由于DSI进气道流动特性较为复杂,以上的研究工作多数还是局限于常规进气道形式的单一气动或者隐身性能计算分析,一体化多目标优化设计程度不高,效率较低。本文即针对该问题开展研究,通过改变DSI进气道bump面形状,结合多目标粒子群算法、Kriging代理模型、计算流体力学、计算电磁学以及FFD参数化方法等对DSI进气道的气动、隐身性能进行多目标优化设计。为新一代高性能战斗机的协同设计提供支撑。
1 计算方法 1.1 流场计算方法本文的流场求解基于三维非定常雷诺平均NS方程,其在笛卡尔坐标系下的表达式为:

|
(1) |
式中, ∂Ω为固定区域Ω的完全边界; n是固定区域外边界的外法向向量; Q=(ρ, ρu, ρv, ρw, ρe)T是守恒通量; Fc是无黏通量; Fv是黏性通量。
湍流模型采用k-ω SST模型, 物面边界采用无滑移边界条件, 进气道出口设置为压力出口边界条件, 远场采用压力远场边界条件。
1.2 电磁场计算方法进气道的电磁隐身特性求解以RCS为衡量标准, 它描述了物体因被电磁波照射而向各个方向散射, 被雷达捕捉的雷达回波强度及其电磁特性。其表达式如下
|
(2) |
式中, R为目标到雷达的距离; Si为目标所在位置处雷达在空间单位面积上通过的辐射功率; Ss为雷达所在位置空间单位面积上通过的散射功率。由于能量散射场可分解成垂直极化
|
(3) |
在计算目标RCS的过程中, 需要平衡计算效率与计算精度。由于不同的计算方法对于不同尺寸的目标具有不同的适应性, 在选择合适的计算方法时也需要考虑目标的电尺寸大小。
2 基于EHVI加点准则的Kriging代理模型 2.1 多目标粒子群优化算法粒子群优化算法(particle swarm optimization, PSO)最初是为了模拟鸟群的飞行觅食行为而提出的。其初始化为一群随机粒子, 通过迭代寻找最优解。在每一次迭代中, 粒子通过跟踪2个极值来更新自己:第一个就是粒子本身所找到的最优解, 称为个体最优值Pb; 另一个极值是整个种群目前找到的最优解, 该极值称为全局最优值Gb。在找到上述2个最优值时, 粒子根据(4)式和(5)式来更新自己的速度和位置

|
(4) |
|
(5) |
式中,c1和c2分别为认知和社会加速系数, 取值范围为[0, 4], 一般取为c1=c2=2;r1和r2为2个在[0, 1]内服从均匀分布的随机变量。
CDMOPSO(crowding distance multi-objective PSO)算法是在Raquel提出的多目标粒子群算法(MOPSO)[10]基础上使用拥挤度算子改进[11]的一种多目标优化算法。拥挤度算子(见图 1)[12]能够通过选择引导粒子运动的最优解以及维护外部档案来增加种群的多样性, 避免算法过早陷入局部最优。这种算法的优点是结构简单, 易于实现, 缺陷是基于均匀分布的变异操作使其易于陷入局部最优, 解决多模态优化问题的能力较差, 而气动隐身多目标优化设计是一种高维强非线性问题, 因此本文选择使用α-stable变异函数来对其进行改进, 以改善粒子群智能算法的全局/局部搜索能力平衡问题。

|
| 图 1 拥挤距离计算示意图 |
α-stable分布[13-14]是一个非常丰富的分布族, 它有3种特殊情况:①当α=2时是高斯分布, 记为
|
(6) |
式中, sgn(t)是t的符号, Φ表示为
|
(7) |
通过α-stable分布产生的随机数, 对PSO种群中的个体进行变异。在变异的过程中, 通过动态调整函数的稳定系数α改变变异的范围和幅度。稳定系数α描述了分布的尾迹大小, 决定了随机数的范围。α的变化范围是[1, 2]。具体变化见图 2。在开始阶段使用较小的α值, 增强全局搜索能力, 随着优化循环的进程, α值越来越大, 全局搜索能力减弱, 局部搜索能力增强, 为寻找高精度解提供帮助。其具体变异操作过程见文献[15], 流程图见图 3。

|
| 图 2 α值得变化过程 |

|
| 图 3 ASMOPSO流程图 |
为了增加局部区域的代理模型精度, 减少对初始样本空间精度的依赖, 采用基于自适应加点的动态Kriging代理模型对粒子群中的未观测点进行近似评估, 动态更新代理模型样本点过程中, 使用EHVI(expected hyper-volume improvement)加点准则选择最可靠的未观测点进行真实函数评估, 并用于更新Kriging代理模型。
EHVI是Emmerich[16-17]在超体积[18]理论基础上结合单目标EI(expected improvement)加点准则[19]提出的一种处理高耗时优化问题的新型多目标加点准则。
给定一个新的解y, 假设它不被Pareto解集P中的任意个体所支配, 那么解集P的超体积改善就是

|
(8) |
进而就可以定义超体积改善函数为

|
(9) |
那么基于Kriging代理模型的多目标响应可视为互相独立、且服从高斯分布的随机变量Yj(x), 有以下关系

|
(10) |
式中, m为目标数量。
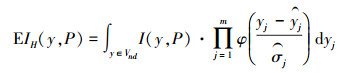
在此基础上, 就可以得到多目标期望改善函数
|
(11) |
式中,Vnd是由Pareto解集确定的非支配区域, 如图 4中细实线与坐标轴封闭的区域所示。从(11)式可以看出, 如果要精确计算EHVI值, 需要在非支配区域进行多维积分。由于非支配区域的不规则性, 将超体积区域分割成多个矩形单元是必不可少的步骤。当Pareto解较多或者目标维度较高时, 精确地识别这些矩形单元并对其进行EI积分是一件非常耗时的工作。

|
| 图 4 超体积改善示意图 |
为此文献[20]提出了一种动态的EHVI值计算方式[20], 函数测试表明其可以极大地节约超体积期望改善的计算时间。本文所使用加点准则就是基于此动态计算方法的EHVI加点准则。
2.4 基于EHVI的多目标粒子群算法区别于传统地寻找当前Kriging代理模型下的最大EHVI值的子优化过程, 本文计算当前种群中所有个体的EHVI值并对它们进行降序排列, 选取前几个个体进行真实函数评估并加入样本集并且用于更新外部非支配解档案来引导ASMOPSO中个体的移动。
结合多目标粒子群算法、Kriging代理模型、EHVI加点形成的高效多目标优化算法, 详细步骤如下:
1) 给定粒子群规模大小N, 外部档案规模NREP, 最大迭代步数Imax, 并将外部档案初始化为空, 即REP=∅; 设置超体积计算参考点REF_Pnt;
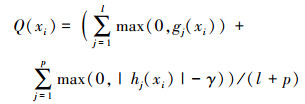
2) 使用拉丁超立方法生成Nsamples个样本点, 计算目标函数向量, 使用公式
|
(12) |
计算样本粒子的可行度(Q)。识别样本粒子中的可行解(如果Q=0), 按照Pareto支配关系从可行粒子中识别非支配粒子并保存在外部档案REP中; 构建Kriging代理模型;
3) 初始化粒子群SWARM:对群体中的每一个粒子(i=1, …, N), 随机生成当前位置Xi; 设置初始速度为Vi=0;调用Kriging代理模型评价粒子; 初始化每个粒子的最优位置为pi=Xi; 利用(13)式计算其不可行度
|
(13) |
式中,beta是一个放大系数, 介于[0, 1]之间;
4) 给定初始迭代数:t=0;
5) 程序的主循环如下:
a) 构建Kriging代理模型, 设置临时外部档案REP2=∅, 可行粒子档案REP3=∅; 同时t=t+1;
b) 计算REP中每个粒子的拥挤距离CD[12], 按照CD值大小降序排列;
c) 对每一个粒子(i=1, …, N), 有:
(1) 如果REP≠∅, 从外部档案REP中的前P个粒子中随机选择一个非支配解作为个体Xi的全局最优pg, 否则, 从SWARM中选择Q值最小的那个粒子作为个体Xi的全局最优pg;
(2) 按照速度和位置更新公式(4)和(5)更新速度和粒子的位置。如果粒子位置超出搜索空间的边界, 那么将它的位置值定位在边界上, 但是它的速度值乘以向量(-1)使其反向运动;
(3) 利用建立的代理模型评价粒子的目标向量, 并按照(13)式计算Qi; 计算超体积期望改善值EIX;
(4) 如果Qi(t+1)<Qi(t), 那么Qi<Qi(t+1), 并且将粒子的个体最优位置更新为p(i)=Xi; 如果Qi(t+1)=Qi(t), 那么使用公式

|
(14) |
更新个体最优位置, 否则只更新Qi=Qi(t+1);
d) 按照给定的变异比例进行多维度α-Stable变异操作; 利用建立的代理模型评价变异粒子的目标向量, 按照(13)式计算其不可行度(Q值), 并计算其超体积期望改善值EIX; 然后将这些变异粒子并入种群SWARM中;
e) 从SWARM中识别可行粒子并保存在可行粒子档案REP3中, 对REP3中的个体进行Pareto比较, 识别非支配粒子并将其保存在临时外部档案REP2中;
f) 如果REP2≠∅, 对其中的粒子按照EIX值大小降序排列, 选择其中顶部排列的n_temp几个粒子(例如n_temp=2), 调用真实目标函数计算其向量值, 并用公式(12)计算它们的真实不可行度(Q值), 如果粒子为可行解(即Q=0), 则将其加入样本, 更新样本空间, 同时将可行粒子加入外部档案REP中;
g) 剔除REP3中与外部档案REP中坐标重合的个体; 选择REP3中EIX值最大的个体调用真实目标函数计算其向量值, 将其加入样本, 更新样本空间, 并用公式(12)计算它真实的不可行度(Q值)。如果粒子可行(即Q=0), 同时将其加入外部档案REP中;
h) 进行Pareto比较移除REP中所有的被支配解:由于外部档案的大小是一个给定的值, 所以这里使用动态档案维护策略[21]对REP进行删减操作, 保证REP中的非支配解数量不多于NREP, 并保持档案中非支配解的多样性;
i) 如果当前种群SWARM中的可行解(Q=0)的数量不大于N, 那么对其进行Q值降序排列, 选择其中的前N个粒子并保存为新的SWARM; 否则, 计算SWARM中所有可行解与REP中的所有非支配解的最小欧拉距离, 并按最小欧拉距离进行升序排列, 选择其中的前N个粒子保存为新一代SWARM;
结束!
3 进气道气动隐身优化设计将上一节介绍的高效多目标优化算法应用于DSI进气道的气动、隐身多目标优化设计, 其优化流程见图 5。

|
| 图 5 EHVIMOPSO流程图 |
使用图 6所示的带前机身的DSI进气道作为初始外形, 以DSI进气道的bump面为研究对象, 以超声速设计点时进气道出口平面的总压畸变系数和前向RCS均值为优化目标, 以亚、超声速设计点时的总压恢复、质量流率为约束, 并使用FFD(free form deformation)方法对三维bump面进行参数化处理。

|
| 图 6 带前机身的DSI进气道的几何外形 |
采用上文介绍的EHVIMOPSO算法对DSI进气道进行气动隐身两目标优化设计。2个设计点的计算状态如下:
设计点1:H=9 km, Ma∞=0.75, α=0.0°, Re=6.85×106;
设计点2:H=11 km, Ma∞=1.70, α=0.0°, Re=1.24×107;
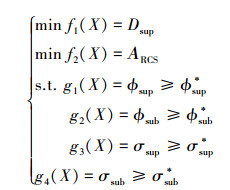
按照上文所述的优化设置建立的优化数学模型如下
|
式中, D为总压畸变指数, ARCS为0~45°的RCS均值; φ是进气道出口质量流率; σ是总压恢复系数; 下标sup和sub分别对应的是超声速和亚声速设计状态; 设置约束时, DSI进气道的给定的气动特性值为ϕsub*=49.20, ϕsup*=101.00, σsub*=0.97和σsup*=0.905。优化模型中各目标值定义如下
总压畸变指数D
|
进气道出口质量流率ϕ
|
(16) |
总压回复系数σ
|
(17) |
在本文的2个设计点中攻角与侧滑角均设置为零, 因此使用半模计算。采用由ANSYS ICEM CFD软件生成的空间六面体网格对流动区域进行离散, 网格数量为160万。在优化设计循环中, 使用该软件自带的脚本功能实现网格的运动[22]。

|
| 图 7 计算网格 |
本文的优化对象为真实尺寸的某型DSI进气道, 在计算RCS时, 为平衡计算精度与计算时间, 选择大面元物理光学法LEPO(large element PO)配合一致性几何绕射理论(UTD)计算边缘绕射场作为本文的电磁求解方法。计算状态为单站, 极化方式为水平极化, 雷达频率选择为10 GHz。选择半模计算, 计算范围为θ=0~45°, 步长为1°。一般低可探测飞行器前向方位角φ为± 20°以内, 考虑到雷达探测几率问题[23-24], 在计算RCS时设定φ=-15°, RCS计算示意图见图 8。

|
| 图 8 RCS计算示意 |
基于FFD法生成的空间控制点分布如图 9a)所示, 对其进行适当的旋转操作, 并将其移动到bump包附近, 其结果如图 9b)所示。很明显在此控制体系下的优化设计变量偏多, 下文按照优化设计的特点对其做一些简化处理。由于bump压缩面的流动特性决定了X和Z方向的变形对优化的结果影响较小, 因此这里只对所有控制点的Y坐标进行变化; 为了避免由于bump压缩面的总体高度发生太大改变而引起的激波系的剧烈变化, 控制在Y方向上的第1和第3层控制点坐标保持不变, 只移动Y向第2层控制点的坐标; 为了保持bump压缩面变形后整体的光滑性, 将控制点X和Z向的第一层和最后一层控制点固定, 这样可以保证插值曲面的连续性。最后获得控制体设计变量的个数为5×4=20。

|
| 图 9 bump压缩面FFD参数化控制点 |
在进行FFD参数化之后, 使用曲面插值方法重新生成bump压缩面, 这时与原始bump面相比几何误差的大小取决于插值点的数量和分布, 但是它对进气道气动特性的影响一般都不是特别大。为了直观的说明这个误差的大小, 对其进行CFD仿真比较, CFD计算结果数据的比较见表 1, 可以看出在跨声速设计点时, 两者的差距几乎可以忽略不记, 而在超声速设计点时也仅有一些微小差异。
| Ma∞ | Type | Maexit | σ | D | ϕ/(kg·s-1) |
| 0.75 | 原始 | 0.396 9 | 0.970 9 | 0.120 2 | 49.40 |
| FFD | 0.396 9 | 0.970 9 | 0.120 0 | 49.40 | |
| 1.70 | 原始 | 0.403 6 | 0.909 7 | 0.150 8 | 101.23 |
| FFD | 0.403 7 | 0.910 1 | 0.150 9 | 101.25 |
使用最优拉丁超立方抽样(optimal latin hypercube sampling, OLHS)[25]生成40个初始样本点, 建立初始代理模型并通过EHVIMOPSO多目标优化算法搜索Pareto前沿。其中粒子群种群规模为200, 外部档案大小为50;惯性系数从0.75逐渐减小到0.25;认知加速系数和社会加速系数c1=c2=2.0;稳定系数α变化范围为1.0~2.0。迭代步数为60步, 每代使用EHVI值选择3个最稳定的个体加入到样本空间中, 并更新代理模型。优化结果见图 10。

|
| 图 10 Pareto前沿 |
从图中可以看出Pareto解分布较为稀疏, 但是分布范围较为宽广, 相比总压畸变指数, RCS的优化程度小得多, 这也说明bump外形的变化对进气道气动性能的影响远高于隐身性能。为了更好地说明优化设计对DSI进气道气动、隐身性能的影响, 从图中选择解A来与原始进气道进行比较分析。
气动和隐身计算结果对比见表 2、表 3。由此可见, 在超声速段进气道的总压畸变以及RCS均有缩减。其中总压畸变缩减6.03%, RCS缩减3.49%。图 11~12分别显示了优化前后的DSI进气道出口平面上的总压分布。可以看出优化前后出口总压分布在跨声速时差异较小, 优化后的高总压区面积略大于初始外形; Ma∞=1.7时差异较大, 虽然优化后的总压区域最高值略低于原始外形, 但优化后的进气道出口高总压区面积远高于原始外形, 这也导致优化后的进气道在超声速工况下的总压畸变指数要低于原始外形。在RCS缩减方面, 由表 2可知, RCS的优化幅度没有总压畸变高。这是由于原始外形的RCS前向均值本身就较低, 且优化过程中改变的是bump面这样的小型控制面导致了优化的幅度较低, 从图 13优化前后的RCS分布曲线可知, 在飞行器头向的0°~10°范围有一个明显的峰值缩减, 其余部分近似于重合峰值有区别, 整体趋势相同。
| Ma∞ | Type | σ | D | ϕ/(kg·s-1) |
| 0.75 | 原始 | 0.9709 | 0.120 2 | 49.40 |
| 优化结果A | 0.971 8 | 0.119 0 | 49.65 | |
| 1.70 | 原始 | 0.909 7 | 0.150 9 | 101.23 |
| 优化结果A | 0.908 6 | 0.141 8 | 101.03 |

|
| 图 11 原始进气道出口总压分布 |

|
| 图 12 优化结果A的进气道出口总压分布 |
|
|
| 图 13 优化结果A与原始外形的RCS计算结果对比 |
本文使用计算流体力学和计算电磁学等数值模拟手段计算进气道气动和隐身性能,采用EHVIMOPSO算法对某型DSI进气道进行了气动、隐身综合多目标优化设计,得到的主要结论如下:
1) 以bump面为设计对象的DSI进气道的气动、隐身优化设计能同时改善进气道的气动隐身性能,其中总压畸变缩减6.03%,RCS缩减3.49%;
2) bump面外形的改变对DSI进气道的超声速气动性能的影响要大于跨声速工况时的气动性能和隐身性能;
3) 结合多目标粒子群优化算法和EHVI加点代理模型的高效多目标优化系统同时兼顾了优化效率和优化精度,在解决类似于超声速进气道多目标优化设计的昂贵优化问题具有较大的应用潜力。
| [1] | KIM S D. Aerodynamic Design of a Supersonic Inlet with a Parametric Bump[J]. Journal of Aircraft, 2009, 46(1): 198-203. DOI:10.2514/1.37416 |
| [2] | LIM S, KOH D H, KIM S D, et al. A Computational Study on the Efficiency of Boundary Layer Bleeding for the Supersonic Bump Type Inlet[C]//47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, 2009: 5-8 |
| [3] | GAIDDON A, KNIGHT D D. Multicriteria Design Optimization of Integrated Three-Dimensional Supersonic Inlets[J]. Journal of Propulsion and Power, 2003, 19(3): 456-463. DOI:10.2514/2.6129 |
| [4] | ZHANG Z K, LUM K Y. S-Shaped Inlet Design Optimization Using the Adjoint Equation Method[R]. AIAA-2006-4453 |
| [5] | LEE C H, AHN J K, BAE H G, et al. Efficient Global Optimization Incorporating Feasibility Criterion for the Design of a Supersonic Inlet[J]. Journal of Aerospace Engineering, 2012, 226(11): 1362-1372. |
| [6] | KIM H, LIOU M S. Shape Design Optimization of Embedded Engine Inlets for N2B Hybrid Wing-Body Configuration[J]. Aerospace Science and Technology, 2013, 30: 128-149. DOI:10.1016/j.ast.2013.07.011 |
| [7] | GAN W, ZHANG X. Design Optimization of a Three-Dimensional Diffusing S-Duct Using a Modified SST Turbulent Model[J]. Aerospace Science and Technology, 2017, 63(4): 63-78. |
| [8] |
张鹏飞, 龚书喜, 徐云学, 等. 电大尺寸开口腔体的RCS计算和控制[J]. 西安电子科技大学学报, 2009, 36(1): 111-115.
ZHANG Pengfei, GONG Shuxi, XU Xueyun, et al. Computation and Control of RCS for Large Open-Ended Cavities[J]. Journal of Xidian University, 2009, 36(1): 111-115. (in Chinese) DOI:10.3969/j.issn.1001-2400.2009.01.021 |
| [9] |
郭文彦, 朱颜镇. 飞机进气道的高频电磁散射特性及RCS计算[J]. 哈尔滨工业大学学报, 1999(1): 123-126.
GUO Wenyan, ZHU Yanzhen. HF Electromagnetic Scattering Properties and RCS Calculation of the Airplane's Inlet[J]. Journal of Harbin Institute of Technology, 1999(1): 123-126. (in Chinese) DOI:10.3321/j.issn:0367-6234.1999.01.035 |
| [10] | COELLO C A C, LECHUGA M S. MOPSO: A Proposal for Multiple Objective Particle Swarm Optimization[C]//Proceedings of the IEEE Congress on Evolutionary Computation, 2002: 1051-1056 |
| [11] | RAQUEL C R, NAVAL P C. An Effective Use of Crowding Distance in Multi-Objective Particle Swarm Optimization[C]//Proceedings of the Workshops on Genetic and Evolutionary Computation, 2005: 257-264 |
| [12] | DEB K, PRATAP A, AGARWAL S, et al. A Fast and Elitist Multi-Objective Genetic Algorithm:NSGA-Ⅱ[J]. IEEE Trans on Evolutionary Computation, 2002, 6(2): 182-197. |
| [13] | WERON A, WERON R. Computer Simulation of Levy-α Stable Variables and Processes[M]. Springer Berlin Heidelberg, 1995: 379-392. |
| [14] | KOGON S M, MANOLAKIS D G. Signal Modeling with Self-Similarα Stable Processes:the Fractional Levy Stable Motion Model[J]. IEEE Trans on Signal Processing, 1996, 44(4): 1006-1010. |
| [15] |
樊华羽, 詹浩, 程诗信, 等. 基于α-stable分布的多目标粒子群算法研究及应用[J]. 西北工业大学学报, 2019, 37(2): 232-241.
FAN Huayu, ZHAN Hao, CHENG Shixin, et al. Research and Application of Multi-Objective Particle Swarm Optimization Algorithm Based on α-Stable Distribution[J]. Journal of Northwestern Polytechnical University, 2019, 37(2): 232-241. (in Chinese) DOI:10.3969/j.issn.1000-2758.2019.02.004 |
| [16] | EMMERICH M, GIANNAKOGLOU K, NAUJOKS B. Single-and Multi-Objective Evolutionary Optimization Assisted by Gaussian Random Field Metamodels[J]. IEEE Trans on Evolutionary Computation, 2006, 10(4): 421-439. DOI:10.1109/TEVC.2005.859463 |
| [17] | EMMERICH M, DEUTZ A H, KLINKENBERG J W. Hypervolume-Based Expected Improvement: Monotonicity Properties and Exact Computation[C]//IEEE Congress on Evolutionary Computation, 2011: 2147-2154 |
| [18] | ZITZLER E. Evolutionary Algorithms for Multiobjective Optimization[M]. Switzerland, Zurich: Swiss Federal Institute of Technology, 1998. |
| [19] | JONES D R, SCHONLAU M, WELCH W J. Efficient Global Optimization of Expensive Black-Box Functions[J]. Journal of Global Optimization, 1998, 13: 455-492. DOI:10.1023/A:1008306431147 |
| [20] | CHENG Shixin, ZHAN Hao, SHU Zhaoxin, et al. Effective Optimization on Bump Inlet Using Meta-Model Multi-Objective Particle Swarm Assisted by Expected Hyper-Volume Improvement[J]. Aerospace Science and Technology, 2019, 87: 431-447. DOI:10.1016/j.ast.2019.02.039 |
| [21] | CHENG S X, ZHAN H, SHU Z X. An Innovative Hybrid Multi-Objective Particle Swarm Optimization with or without Constraints Handling[J]. Applied Soft Computing, 2016, 47: 370-388. DOI:10.1016/j.asoc.2016.06.012 |
| [22] | MENTER F R. Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications[J]. AIAA Journal, 1994, 32(8): 1598-1605. DOI:10.2514/3.12149 |
| [23] |
王旭, 宋笔锋, 郭晓辉.飞行器被雷达发现概率的计算方法研究[J].系统工程理论与实践, 2006, 26(6): 130-134 WANG Xu, SONG Bifeng, GUO Xiaohui. Research on the Approach for Calculating the Probability of Detecting an Aircraft by Radar System[J]. Systems Engineering-Theory & Practice (in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-XTLL200606021.htm |
| [24] |
张考, 马东立. 军用飞机生存力与隐身设计[M]. 北京: 国防工业出版社, 2002.
ZHANG Kao, MA Dongli. Military Aircraft Survivability and Stealt Design[M]. Beijing: National Defense Industry Press, 2002. (in Chinese) |
| [25] | MORRIS M D, MITCHELL T J. Exploratory Designs for Computer Experiments[J]. Journal of Statistical Planning and Inference, 1995, 43(3): 381-402. DOI:10.1016/0378-3758(94)00035-T |
2. School of Aerospace Engineering, Tsinghua University, Beijing 100084, China
