

2. 西北工业大学 航空学院, 陕西 西安 710072
随着多电及全电飞机的出现, 飞控系统正在向功率电传(power-by-wire)方向发展, 新型电机系统在航空航天领域的应用也愈为广泛。电动伺服加载系统(electric servo loading system, ESLS)采用PWM驱动装置控制伺服加载电机, 以模拟电动机在各种负载条件下起动、运行与制动, 是电机控制领域半实物仿真中的重要设备, 具有可靠性高、动态性能好、多余力小等优势, 正逐渐取代传统电液伺服加载系统[1-2]。
文献[1]针对ESLS建模困难、常规控制难以取得很好控制效果的问题, 提出一种基于模型自适应控制的控制方法, 虽提高了ESLS的低频力矩信号跟踪性能, 但模型过于理想, 且控制器计算量庞杂, 工程上实现难度大, 也未考虑ESLS内部、外部扰动对ESLS输出转矩的影响, 文献[2]针对传统ESLS存在难以实现宽频带高精度加载的问题, 提出一种基于PR控制器的负载模拟控制方法, 在一定程度上实现了较低频带处的无静差加载, 但实际PR控制器系数难以精确整定, 控制器设计复杂, 动态加载性能有待提高。文献[3]针对ESLS中存在的多余力力矩、加载频带窄等问题, 提出一种基于位置比例的三环控制方法。相比PID控制方法, 上述现象得到了改善。但控制过程复杂, 且未考虑实际加载中伴随的位置和摩擦扰动和内部电压扰动。
综合上述分析, 可以看到在以往ESLS研究中, 大多分析外部扰动对系统精度的影响, 而现实飞控系统中加载状态时变性强, 在系统加载状态切换时, 系统内部电压扰动对加载精度和响应速度的影响不可忽略, 特别是一些小型的飞控系统, 其对加载精度和响应速度的要求更为严格。
ESLS工作状态切换频繁, 负载突变时要求双PWM变换器有快速的动态响应速度。负载突变会引起直流母线电压剧烈波动, 严重者会引起电力电子装置变换失败。传统做法是通过在直流侧并联一大电容的方式来抑制电压波动, 但这样会使系统响应速度变慢, 同时也增加了系统研发和维护成本, 不适用于小惯性、要求高响应速度的高性能系统。为提高PWM变换器的响应速度和抗扰动能力, 减小电容容量, 提出一种变iq负载功率前馈协调控制方法, 并进行了仿真和实验分析。
1 ESLS用PWM整流器在dq坐标系的数学模型及控制方法ESLS用PWM变换器主电路如图 1所示, Ea, Eb, Ec分别表示三相电网电动势, r, L分别表示网侧等效电阻和滤波电感, 整流器拓扑为三相电压型PWM变换器(voltage source PWM rectifier, 简称VSR), C为直流侧大电容, 虚线框内为加载电机(采用永磁同步电机, PMSM)及其驱动器。

|
| 图 1 ESLS用三相PWM变换器主电路 |
假设三相电压平衡, 对图 1所示的三相VSR在两相dq旋转坐标系下建立其电压方程[4-5]

|
(1) |
式中, id, iq表示三相电网电流在两相旋转dq系下的d轴和q轴分量, ed和eq是指交流电网电压经过park变换后的d, q轴电压分量, uvd, uvq表示dq坐标系下整流器三相桥臂中点处电压d轴和q轴分量, ω, r, L分别表示为三相电网的角频率、网侧导线内阻和滤波电感, C, ic分别为直流侧电容的容值和电流。
假设电网三相电压平衡, 则上述的各dq坐标系下的电压、电流分量均为直流量, 当采取电网电压定向的方式研究整流器时, d轴电压分量ed为Um, Um为三相电网相电压幅值[6-9]

|
(2) |
由(1)、(2)式可得出dq坐标系下三相VSR的桥臂中点电压方程

|
(3) |
由(3)式可看出, dq同步坐标系下d轴和q轴电流之间存在耦合, 在系统实际工作时d轴电流和q轴电流相互耦合, 因此一般的PI双环控制方法难以起到理想的控制效果。较为常用的方法是选用拟线性化的方式来实现d轴电流与q轴电流的解耦[7], 用以消除耦合电流对控制系统的影响, 实现两相电流的单独控制, 本文选取实际所检测的两相电流代入(3)式中的耦合项, 以实现线性控制。则PI型电流控制器方程[5]
|
(4) |
式中,id*表示整流器的有功电流参考值, 直接决定着输出电流的大小, 是电压环PI调节器的输出值。iq*表示无功电流的给定参考值, 因单位功率因数控制需要, 无功电流给定值为0, 则PI型双环控制结构图如下:

|
| 图 2 三相PWM整流器PI双闭环控制策略 |
上述的基于同步dq坐标系下的PI双闭环控制, 只保证了系统的稳态性能, 实际上电流环的跟随速度慢于实际有功电流参考值[6], 系统的动态特性较差。对于采取上述控制方法的矿用提升机、风力发电双馈系统等大容量、高惯量系统来说, 其负载变化缓慢, 这种电流环的滞后性对系统的影响不明显, 而对于ESLS这类切换频率高、小惯量系统来说, 当三相PWM变换器负载突变时, 这种电流环的滞后效果会严重影响系统性能, 从实际测量的直流母线电压上可以直观反映。
对于图 1所示的ESLS主电路, 假设负载侧逆变器无开关损耗、PMSM电机效率为100%, 则网侧和负载侧功率表达式为
|
(5) |
式中,PVSR, Pload分别为整流输入有功和负载侧有功功率; ωe, Te分别表示加载电机的角速度和转矩; ic表示为电容的瞬时电流。可以看到, 当PVSR与Pload相等时, 有ic为零, 即电压波动为零。在负载突变时, 控制PVSR快速跟随Pload变化, 是减小电压波动的有效途径。
假设电流环为一时间常数为Ti的惯性环节, 设在负载突变时等效负载阻抗Rload不变, 因电流环存在惯性, 有功电流id只能缓慢变化至最大电流idcmax对应的目标有功电流, 设在[0, Ti]时间内电流跟随曲线为一斜坡函数[7]
|
(6) |
假设在负载突变时直流侧初始电压为udc-pref, 且负载增加时的初始电流值与负载减少后的负载电流相同, 则负载突变所引起的电压波动过程可从电容充电、放电2个过程来分析[7]。
负载突增时, 电流环存在惯性, 因而负载突增时所需要的能量由整流器和电容共同提供, 此过程电容先放电后充电。图 3a)为电容放电过程等效模型, 图 3b)为电容充电等效模型, 则由KVL定理有

|
(7) |

|
| 图 3 负载功率突增时整流器等效模型 |
由叠加原理, 负载突增时直流电压时域表达式为

|
(8) |
对(8)式求一阶导数零点得到函数的最小值为
|
(9) |
由(10)式可得负载突增时最大电压降幅为

|
(10) |
负载突增时直流侧电压重回参考电压值时间为
|
(11) |
假设负载功率突减时初始负载电流为

|
| 图 4 负载功率突减时整流器等效模型 |
结合前述分析, 直流电流不能突变, 只能缓慢减小, 此时变换器输出电流表达式为
|
(12) |
此时电压方程为
|
(13) |
负载功率突减时直流电压表达式为
|
(14) |
同理可得功率突减时直流电压调节时间t2为
|
(15) |
由(11)式、(15)式可知在PI双闭环控制条件下, 当负载功率突变时, 整流器跟随负载功率的能力具有不对称性[6, 9], 即负载功率突增时整流器的调节时间要小于负载功率突减时的调节时间。普通PI控制下系统的调节时间主要取决于k, k越大, 负载突变时整流器直流电压调节时间越小, 但实际上由(6)式可知k值在设计整流器时就已经被设置为一定值[8]。

|
(16) |
PI双环控制策略中电流内环的给定值来自于电压调节器的输出, 这种控制策略下系统的响应速度主要取决于电流内环的追随特性, 三相PWM整流器的输出功率响应速度主要取决于id的响应特性。直流侧最大电流idcmax与id直接相关, idcmax由负载功率决定, id的响应特性决定着整流器的输出响应速度。(16)式中Δid表示功率突增时电流环需要控制的有功电流跟随量。由(12)式、(16)式可知, 若在电流环补偿有功电流, 则电流环自身跟随目标有功电流的调节时间就会得到有效减小。
通过前述分析可知, 在负载突增时变换器直流输出电压的调节时间短于负载突减时变换器的调节时间, 这说明整流器对id的控制具有不对称性。假设在负载突减之初整流器已实现单位功率因数控制, eq为0。则(3)式变为

|
(17) |
可以看到, 当功率突减即did/dt为负值时, 若要加快id的跟随速度, 在电感L上施加负电压可加快有功电流的下降斜率[8]。对于ESLS系统来说响应速度更为重要, 在负载功率突变这一瞬态过程可暂使iq为负值, 以提高id的跟踪速度。当系统处于稳态或负载功率突增时, 控制iq为零, 此时为负载功率前馈控制。在系统负载突减时, 在调整时控制iq为负值, 以加快id跟随负载变化的能力和PWM整流器的响应速度[9-10], 整流器回到稳态后调整iq为0。
功率突增时有did/dt>0, 即id*-id>0, 此时能量由电网流入电机, 因电网电动势的惯性影响, id的调节速度已足够高[9]。有在功率突减时有id*-id<0, 可引入无功电流控制环作为瞬态时无功电流参考值iq*, 考虑电压矢量控制的幅值限制, 这里对-iq*进行限幅[8], iq*上限为0, 下限为
|
(18) |
在实际设计PWM整流器时, 一般采取单位功率因数控制原则, 即将无功电流给定参考值设为0。在负载功率突变时将iq变为负值可以有效加快有功电流的跟踪速度。具体实现是:由于单位功率因数控制需要, 在稳态时将无功电流参考值给定为0, 在负载功率突增时仍设置为0;在负载功率突减时, 将电压环PI调节器输出取负后作为无功电流参考值, 以加快电流环的响应速度。

|
(19) |
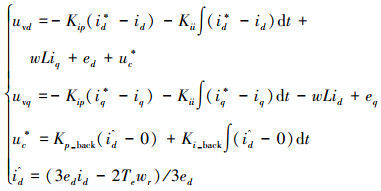
在有功电流内环引入功率补偿, 把负载有功功率变换量反馈至整流器网侧并得到需要补偿的有功电流, 通过(20)式计算得到有功电流的变化量, 结合(19)式中iq*的切换方法, 在功率突增时控制iq为0, 在负载功率突减时控制iq为负, 提高id的跟随速度。通过在电流环补偿有功电流的方式调节整流器侧与加载电机机侧变换器的功率差为0, 并间接抑制电容电流, 最终实现两侧功率动态平衡。协调之后时域下PWM整流器的数学模型如下
|
(20) |
结合(19)式、(20)式得出变iq负载功率前馈控制方案如图 5所示:

|
| 图 5 变iq负载功率前馈控制 |
图 5为变iq负载功率前馈控制原理图。电压误差经PI调节器输出为有功电流给定, 在系统处于稳态时控制无功电流iq为0, 在系统负载突增和稳态运行时保持系统功率因数为1, 在负载功率突减时为提高电流环响应速度实行变iq控制模式, 此时iq*来自于有功电流的比较值。根据(20)式得到三相PWM变换器交流侧的d,q轴控制电压分量, 电压空间矢量控制器根据该电压分量输出PWM波以控制整流器开关器件的开断。
4 仿真分析为验证变iq负载功率前馈控制方法在提高三相PWM整流器响应速度的有效性, 对传统PI双环控制和改进2种控制方式下负载突变时的动态响应分别进行了仿真, 仿真参数为:仿真时间为1.0 s, 网侧变换器SVPWM开关频率f=5 kHz, 机侧变换器SVPWM开关频率f=10 kHz; 电网电压峰值为311 V, 网侧导线内阻r为0.02 Ω, 网侧电感L为4 mH[5, 7], 电容C容量为1 000 μF, 电机功率为5 kW, 加载系统参数如表 1所示。
图 6a)、6b)为加载电机功率在t=0.5 s时分别由-5 kW突变为+5 kW与+5 kW突变为-5 kW时变iq负载功率前馈与普通PI双环控制2种控制方式的抗扰动性能比较。

|
| 图 6 负载突变时直流电压动态响应曲线 |
图 6中的波形数据如表 2所示。从表 2中可以看出:在负载功率突增时, 两者在稳压效果上基本相同, 这是因为在加载电机功率突增时, 电动加载系统从电网处吸收能量, 能量的流动存在由高处到低处下落的一种惯性, 整流器自身电压控制器的响应速度已足够, 但变iq控制具有电压波动次数少的优点; 在负载功率突减时, 三相VSR需要克服三相电网的电动势阻力, 此过程直流侧电容先放电再充电, 整流器直流输出电压先上升再下降, 从电容两端的电压上升峰值变化情况可以看出, 双PI控制在整流器负载突减时母线电压震荡峰值为634.6 V, 变iq控制下电压震荡峰值为624.8 V, 且以进入稳态母线电压值0.5%来看, 双PI控制在负载突减后的电压调节时间为0.04 s, 变iq控制的电压调节时间为0.015 s, 从电压波动峰值比较和调节时间长短都可以看出, 变iq负载功率前馈控制在负载突减时有着更优的控制效果和抗扰动性能。
| 工况 | 控制方法 | Udc调节时间/s | Udc震荡峰值/V | Udc震荡次数 |
| 负载功率突增 | 变iq负载功率前馈控制 | 0.007 | 618.4 | 1 |
| PI双闭环控制 | 0.007 | 622.7 | 2 | |
| 负载功率突减 | 变iq负载功率前馈控制 | 0.015 | 624.8 | 2 |
| PI双闭环控制 | 0.04 | 634.6 | 5 |
结合实验室现有条件和安全因素, 在60 V条件下搭建了ESLS实验平台并进行了实验分析:控制芯片采用TI公司的TMS320F28335, PWM频率为40 kHz, 整流器主电路开关管采用ST公司SiC器件SCT20N120, 加载功率为600 W, 所搭建实验平台如图 7所示。

|
| 图 7 ESLS实验平台 |
图 8为负载功率由0 W增加到600 W时2种控制方法的直流母线电压响应曲线。从图中可以看出:负载功率突增时变iq控制下直流电压调节时间为15.36 ms, 调节过程中直流电压最小值为57.9 V; 双PI控制下直流电压调节时间为17.75 ms, 调节过程中直流电压最小值为57.5 V。

|
| 图 8 功率突增时直流电压响应曲线比较 |
图 9为加载功率由600 W减少到0时2种控制方法的直流母线电压响应曲线。从图中可以看出:负载功率突减时变iq控制调节时间为12.19 ms, 双PI控制则为39.88 ms, 变iq控制直流电压震荡峰值为61.1V, 双PI控制为62.3 V, 变iq控制下直流电压调整时间较双PI控制缩小了57%, 由此可见, 变iq负载功率前馈控制可有效提高三相VSR的动态响应速度, 提高系统的稳定性。

|
| 图 9 功率突减时直流电压响应曲线比较 |
本文分析了负载突变时所引起的直流电压扰动现象, 在负载突增和负载突减2种工况下检验了变iq负载功率前馈控制策略的控制效果。仿真和实验结果表明:在负载功率突增/突减时, 本相比在普通PI双闭环控制策略, 本文方法有着更快的系统响应速度和更好的抗扰动性能。本文将负载功率前馈到了电流内环中, 提高了系统的动态响应速度, 同时满足了加载系统对实时工况高响应速度的要求, 具有一定的应用价值。
| [1] |
税洋, 尉建利, 闫杰. 基于模型参考自适应控制的舵机加载系统研究[J]. 西北工业大学学报, 2018, 36(2): 246-251.
SHUI Yang, WEI Jianli, YAN Jie. Research on Motor Drive Load Simulator Based on Model Reference Adaptive Control[J]. Journal of Northwestern Polytechnical University, 2018, 36(2): 246-251. (in Chinese) DOI:10.3969/j.issn.1000-2758.2018.02.006 |
| [2] |
王哲, 王明彦, 郭犇, 等. 基于PR控制的负载模拟系统[J]. 中国电机工程学报, 2015, 35(2): 486-493.
WANG Zhe, WANG Mingyan, GUO Ben, et al. A Dynamic Load Simulation System Based on Proportional-Resonant Control Method[J]. Proceedings of the CSEE, 2015, 35(2): 486-493. (in Chinese) |
| [3] |
郭行, 陈康, 孙力, 等. 一种引入位置比例控制提高电动负载模拟器性能的控制系统设计方法[J]. 西北工业大学学报, 2014, 32(2): 235-239.
GUO Xing, CHEN Kang, SUN Li, et al. A Control System Design Method for Introducing Position Proportional Control to Improve the Performance of Electric Load Simulator[J]. Journal of Northwestern Polytechnical University, 2014, 32(2): 235-239. (in Chinese) DOI:10.3969/j.issn.1000-2758.2014.02.015 |
| [4] | REN Chunguang. High-Performance Three-Phase PWM Converter with a Reduced DC-Link Capacitor Under Unbalanced AC Voltage Conditions[J]. IEEE Trans on Industrial Electronics, 2018, 65(2): 1041-1050. DOI:10.1109/TIE.2017.2688962 |
| [5] |
汪万伟, 尹华杰, 管霖. 双闭环矢量控制的电压型PWM整流器参数整定[J]. 电工技术学报, 2010, 25(2): 67-72.
WANG Wanwei, YIN Huajie, GUAN Lin. Parameter Setting of Voltage-Type PWM Rectifier with Double Closed-Loop Vector Control[J]. Trans of China Electrotechnical Society, 2010, 25(2): 67-72. (in Chinese) |
| [6] |
赵仁德, 贺益康, 刘其辉. 提高PWM整流器抗负载扰动性能研究[J]. 电工技术学报, 2016, 23(2): 67-72.
ZHAO Rende, HE Yikang, LIU Qihui. Improvement of Anti-Load Disturbance Performance of PWM Rectifier[J]. Trans of China Electrotechnical Society, 2016, 23(2): 67-72. (in Chinese) |
| [7] |
张崇巍, 张兴. PWM整流器及其控制[M]. 北京: 机械工业出版社, 2003.
ZHANG Chongwei, ZHANG Xing. PWM Rectifier and Its Control[M]. Beijing: Mechanical Industry Press, 2003. (in Chinese) |
| [8] | WANG Meng, SHI Yanyan, ZHENG Xinxin. Analysis, Messsssasurement, and Compensation of the System Time Delay in a Three-Phase Voltage Source Rectifier[J]. IEEE Trans on Power Electronics, 2016, 31(8): 6031-6043. DOI:10.1109/TPEL.2015.2498279 |
| [9] |
钟炎平, 沈颂华. PWM整流器的一种快速电流控制方法[J]. 中国电机工程学报, 2005, 25(12): 52-56.
ZHONG Yanping, SHEN Songhua. A Fast Current Control Method of PWM Rectifier[J]. Proceedings of the CSEE, 2005, 25(12): 52-56. (in Chinese) DOI:10.3321/j.issn:0258-8013.2005.12.010 |
| [10] | QU Y B, SONG H H. Energy-Based Coordinated Control of Wind Energy Conversion System with DFIG[J]. Journal of Control, 2017, 17(6): 1413-1421. |
2. School of Aeronautics, Northwestern Polytechnical University, Xi'an 710072, China
