

2. 中国船舶工业系统工程研究院, 北京 100094
多平台多传感器相互引导是协同搜索与跟踪的一种重要方式, 即利用指示传感器观测获得的信息引导异平台传感器迅速对准目标进行探测搜索并确认是否捕获该目标。其中, 指示传感器引导异平台传感器最终捕获目标的概率(即成功引导概率)是判定多平台多传感器相互引导性能的重要指标。
作为多平台多传感器相互引导的基础, 单平台下主要研究了单目标情况下ESM对2D雷达、IRST对3D雷达的引导成功概率及其随某些参数变化的规律[1-3], 探讨了存在干扰目标时IRST引导雷达的性能[4]。多平台多传感器目标引导分别分析了平台间ESM、IRST对雷达的指示引导问题, 推导出测角误差传递方程和成功引导概率并进行仿真[5-6]; 文献[7]探讨了多平台异平面传感器的引导问题, 给出了引导误差传递公式和多平台下测角转换方程; 探讨了多平台多传感器的数据配准问题[8]。文献[9-10]研究了传感器指示引导下雷达的搜索空域及策略; 雷达组网的引导过程主要包括引导信息及坐标转换、雷达搜索过程中的波位编排[11]。文献[12]分析了不同种类传感器相互引导的重要作用。针对具体场景, 进一步探究异传感器间的引导问题并研究其实现方法[13-14]。
现有文献在研究传感器引导雷达的搜索策略时多只研究单平台多传感器的相互引导, 对引导搜索雷达波位编排的研究也局限于单平台情况; 在分析运动目标在搜索空域的出现概率密度及成功引导概率过程中由于公式推导不严谨而存在不精确的问题。因此, 本文详细分析及推导精确的运动目标指示空域分布概率、完善成功引导概率方程, 探究多平台异平面多传感器相互引导的原理与过程, 给出以引导中心为起始波位、距离递进搜索且控制单波位误交接概率水平的雷达搜索策略并进行仿真验证。
1 传感器引导模型图 1为多平台下多传感器相互引导的指示引导空间关系示意图(若指示传感器不具备测距功能, 默认其所在平台携带有其它具备测距功能的传感器提供辅助)。在搜索目标时, 相控阵雷达相比其它传感器有着卓越的搜索能力, 因此作为被引导传感器。如图 1所示, 以指示传感器为坐标原点设定坐标系, 被引导雷达在坐标系中的位置设为(x0, y0, z0), 其瞬时视场的方位、俯仰视域分别为Fθ, Fφ。指示传感器对目标i的斜距、方位角、俯仰角估计值设为

|
| 图 1 多平台下传感器引导雷达的空间关系示意图 |
由于大部分传感器在指示搜索时均进行方位角与俯仰角的引导, 故设指示传感器对目标的方位、俯仰角估计信息转换到被引导雷达坐标系中的值为


 ,
,

|
(1) |

|
(2) |
假设



|
(3) |
则目标在被引导雷达坐标系内的方位、俯仰方差为
|
(4) |
|
(5) |
由上述推导可知, 目标i出现在指示引导空域的概率密度可作如下表示
|
(6) |
引导期间, 传感器所在平台和目标的相对运动可能会导致方位、俯仰测量的估计偏差, 设其最大值为(Sθmi, Sφmi)。若将引导结束时目标在被引导雷达坐标系中的方位、俯仰真值表示为(Θ′i, Φ′i), 由于平台与目标的相对运动存在不确定性, 不妨设Θ′i ~U[θ′i-Sθmi, θ′i+Sθmi], Φ′i ~U[φ′i-Sφmi, φ′i+Sφmi]。当指示信息转换到被引导雷达坐标系中所得的待捕获目标方位、俯仰值, 即引导中心, 满足上述均匀分布时, 可以利用定积分的数值方法对原目标出现在指示空域的概率密度公式作如下更新:
考虑相对运动误差时目标方位角的概率密度
|
(7) |
考虑相对运动误差时目标俯仰角的概率密度
|
(8) |
则目标出现在指示空域的概率密度可表示为:

|
(9) |
设目标方位真值处于被引导雷达方位探测范围内的事件为Xθ, 目标俯仰真值处于雷达俯仰探测范围内的事件为Xφ。令Fθ/2=Fθ/2, 并将单个目标的(Sθmi, Sφmi)简写为(Smθ, Smφ), 则引导结束时待捕获目标仍处在被引导雷达视域内的概率为:
|
(10) |
式中,E[·|Θ′i]表示对Θ′i求均值。令e=Θ′i-θ′i, 利用标准正态分布中Φ(x)+Φ(-x)=1的性质化简上式得

|
(11) |
设
|
(12) |
同理有
|
(13) |
则成功引导概率可表示为
|
(14) |
接着定义判决空域A0, 即被捕获的引导交接目标所在的空域。用fi(a)表示(9)式, Pi表示目标i在某一空域Ak的分布概率:
|
(15) |
为保证目标交接在多目标情况下能准确完成, 定义
|
(16) |
在指示传感器提供待捕获目标的方位、俯仰引导信息并转换到被引导雷达坐标系下后, 相控阵雷达依靠优越的波束捷变能力在指定空域内按照特定的搜索策略对目标进行扫描搜索, 当引导成功概率达到某一门限值时即可宣告捕获完成。
用Ω表示雷达在被引导过程中搜索的空域。本文用波位作为组成空域的单位, 假设采用列状波束进行波位排列, 设已搜索的波位数量为N0, 则可定义搜索空域为Ω={Ωj}j=1N0。假设被引导雷达搜索性能决定的最大搜索时间为T0, 波束驻留时间为t0, 则引导时效性要求最多搜索的波位数为

|
(17) |
在多目标环境中, 被引导雷达在指示引导空域内对待捕获目标(记为第0号)若只追求其高探测概率, 则有可能导致对非待捕获目标也是高探测概率, 进而可能导致捕获失败。
为形象表述非待捕获目标对雷达搜索结果的影响, 首先将雷达在波位j上对待捕获目标的成功捕获概率定义为引导成功概率

|
(18) |
|
(19) |
在传统工程应用中, 搜索空域的确定一般采用“3σ”准则, 即取(θ, φ)=±3σ, 其中σ为引导信息的测角均方差。当考虑载机平台与目标之间的最大相对运动偏差(Sθmi, Sφmi)时, 搜索空域的大小应更正为:θi=±3(σθi+Sθmi), φi=±3(σφi+Sφmi)。相控阵雷达因其灵活的波束捷变能力, 在引导过程中通过合理的搜索策略, 可以先搜取目标分布概率高的区域, 因此一开始搜索空域是不定的。
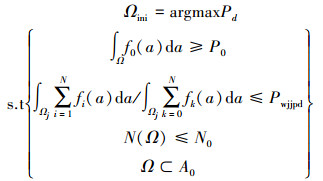
2 引导雷达搜索策略 2.1 引导搜索策略优化被引导雷达的搜索策略包括波束搜索的起始位置及其照射顺序。当待搜索空域内存在多个目标时, 设定如下搜索策略:当被引导雷达对0号目标的捕获概率满足一门限值(记为P0)后, 停止增加新的搜索波位; 多目标情况下, 控制单个波位误交接概率在一门限值Pwjjpd以下, 从而更为精确地使整个搜索空域的误交接概率降低到一个可接受范围; 用时效性要求抑制搜索波位数的增长。
搜索策略优化的理论公式如下:
|
(20) |
式中, Ωini表示初始捕获概率最大的波位, 并作为雷达搜索的起始波位。
2.2 仿真计算流程被引导雷达搜索策略优化流程如下:
1) 以引导信息给出的目标位置为初始搜索波位中心, 已知雷达在该波位上的捕获概率最大, 以该波位(记为Ω1)为搜索中心进行波位编排, 搜索空域Ω由流程中所有雷达波束照射过的位置构成。
2) 计算当前搜索波位内的误交接概率, 判断其是否在单个波位误交接概率门限内。
3) 执行完步骤2)后, 若Pfj>Pwjjpd, 则将该波位舍弃并在波位图中标记为舍弃波位, 波束继续指向下一个波位进行搜索。计算下一个波位的误交接概率, 若Pfj+1≤Pwjjpd, 执行步骤5)到步骤7)结束。
4) 若Pfj+1>Pwjjpd, 重复执行步骤3), 直到Pd(Ω)≥P0完成目标捕获, 或最终Pd(Ω) < P0, 指示引导失败。
5) 计算中心波位的捕获概率Pd1, 若Pd1≥P0, 结束算法流程并停止搜索。引导时间为t0, 搜索空域Ω=Ω1。
6) 若Pd1 < P0, 则按由近到远搜索的顺序选取离中心波位最近的一个波位, 记为Ω2作为新的搜索波位, 计算该波位上的捕获概率Pd2, 若Pd1+Pd2≥P0, 结束流程并停止搜索。引导时间为2t0, 搜索空域Ω=Ω1+Ω2。
7) 重复仿照步骤5)~步骤6)进行搜索, 直到所有搜索波位的

由于不同探测精度的传感器都可以为搜索雷达提供引导信息, 本文分别选择IRST、ESM和雷达作为指示传感器, 设置2种场景进行仿真验证。设引导信息提供的待捕获目标的位置估计值为[54°, 37°]。由于IRST测角精度较高, 假设其测角标准差为[0.3°, 0.3°]; ESM精度较差, 假设其测角标准差为[2°, 2°]; 指示雷达精度介于IRST和ESM之间, 假设其测角标准差为[1°, 1°]。设被引导雷达瞬时视场大小为1°×1°, 捕获概率门限为80%, 引导有效波位数为60, 单个波位波束驻留时间为5 ms。假设被引导雷达在指示传感器坐标系中的位置(x0, y0, z0)=(1 000 m, 2 000 m, -1 000 m), 位置标准差σx0, σy0, σz0均为50 m; 目标斜距估计值R=50 000 m, 标准差σR=100 m, 目标与平台相对运动最大偏差Sm为[0.5°, 0.5°]。
场景1 当交接空域仅存在待捕获目标时, 分别令IRST、ESM和指示雷达牵引雷达对目标进行搜索。
图 2~4为多平台单目标情况下IRST、ESM、雷达3种传感器引导雷达搜索的波位编排结果。多平台条件下引导信息经过坐标系转换, 待捕获目标的方位、俯仰位置变为[53.44°, 39.49°]。当IRST引导雷达时, 测角精度转换为σθ=0.326 5, σφ=0.312 1, 经过4个波位捕获目标, 引导捕获概率为84.29%, 成功引导时间为20 ms; ESM引导时, 测角精度转换为σθ=2.118, σφ=2.044, 经过46个波位捕获目标, 引导捕获概率为80.4%, 成功引导时间为230 ms; 雷达引导时, 测角精度转换为σθ=1.061, σφ=1.023, 经过14个波位捕获目标, 引导捕获概率为81.6%, 成功引导时间为70 ms。3种传感器引导概率比较结果如图 5所示。

|
| 图 2 多平台单目标IRST引导雷达的波位编排 |

|
| 图 3 多平台单目标ESM引导雷达的波位编排 |

|
| 图 4 多平台单目标雷达引导雷达的波位编排 |

|
| 图 5 单目标3种传感器引导雷达成功概率 |
图 2中的线框是传统搜索策略采用的3σ准则划定的搜索空域, 经计算可知:传统搜索方式下IRST、ESM、雷达引导时分别需用25、225、81个波位完成捕获。对比可得, 本文提出的搜索策略缩小了空域搜索范围, 最大程度上节约了雷达搜索资源, 提高了搜索效率。
场景2 当传感器引导雷达的探测范围内存在干扰目标时, 不同的指示传感器因其精度不同, 最终的引导搜索效果也不同。假设指示传感器在待测目标附近探测到2个干扰目标, IRST因其精度较高, 所测干扰目标距待捕获目标较近;雷达、ESM因其精度较低, 所测干扰目标偏离较远。当考虑误交接概率时, 因干扰目标相对位置及传感器测角精度不同, 分别设IRST、雷达、ESM引导下的单个波位误交接概率门限为:30%, 40%, 50%。
图 6~8为多平台多目标情况下IRST、ESM、雷达3种传感器引导雷达搜索的波位编排结果,其引导性能比较如表 1所示。其中:Pwjj1为不考虑Pwjjpd的传统搜索策略的总误交接概率; Pwjj2为考虑Pwjjpd的总误交接概率。由表可知:3种传感器引导雷达在本文所提搜索策略下搜索的总误交接概率相较于传统搜索策略均有大幅度降低, 并且在测角误差高的情况下效果更为显著。

|
| 图 6 多平台多目标IRST引导雷达的波位编排 |

|
| 图 7 多平台多目标ESM引导雷达的波位编排 |

|
| 图 8 多平台多目标雷达引导雷达的波位编排 |
| 传感器 | Pwjjpd/% | Ω | T/ms | Pd/% | Pwjj1/% | Pwjj2/% |
| IRST | 30 | 4 | 20 | 84.29 | 9.4 | 4.4 |
| 雷达 | 40 | 14 | 70 | 80.04 | 25.8 | 11.6 |
| ESM | 50 | 58 | 290 | 80.11 | 25.8 | 12.9 |
实际引导中, 单个波位误交接概率门限Pwjjpd的值需要谨慎选取。当Pwjjpd过大时, 可能会导致被引导雷达对待捕获目标分布概率较低的波位进行“多余搜索”; Pwjjpd过小时, 又会使被引导雷达在搜索过程中忽略一些待捕获目标实际分布概率较高的波位。对于Pwjjpd的选取, 一个先决原则是:所选指示传感器测角误差越大, Pwjjpd应适当调高; 指示传感器测得干扰目标距待捕获目标越远, Pwjjpd应适当调低。总体上应保证在引导时效性要求内能够成功捕获目标, 同时控制总误交接概率在一个较低范围内。
4 结论文章探讨的核心问题是当真实战场环境中存在多个运动目标时, 选定平台传感器如何引导异平台雷达对待捕获目标进行快速、及时、准确地搜索捕获。以传感器引导模型为基础, 对多平台多传感器相互引导的目标搜索策略展开研究, 分析平台间引导误差传递, 构建目标空域分布概率模型; 推导成功引导概率及误交接概率, 进一步给出以引导中心所在波位为起始、距离递进搜索且控制单波位误交接概率水平的引导雷达搜索策略。多场景仿真表明该搜索策略在确保成功捕获目标的同时, 满足引导时效性要求、极大地节约了雷达搜索资源且降低了整个搜索过程的误交接概率; 仿真过程中动态更新目标空域分布概率并记录, 具有良好的实时性和存储性。所提引导搜索策略可用于多平台多传感器协同搜索动态规划软件设计工程。
| [1] |
王国宏, 毛士艺. ESM对2D雷达引导性能分析[J]. 航空学报, 2002, 23(4): 298-301.
WANG Guohong, MAO Shiyi. Performance Analysis of an ESM Guiding a 2D Radar[J]. Acta Aeronauticaet Astronautica Sinica, 2002, 23(4): 298-301. (in Chinese) DOI:10.3321/j.issn:1000-6893.2002.04.016 |
| [2] |
王国宏.分布式检测、跟踪及异类传感器数据关联与引导研究[D].北京: 北京航空航天大学, 2002: 116-131 WANG Guohong. A Study on Distributed Detection, Tracking, Heterogeneous Sensor Association and Cueing[D]. Beijing, Beihang University, 2002: 116-131(in Chinese) |
| [3] |
王国宏, 何友, 毛士艺. IRST对3D雷达引导性能分析[J]. 电子学报, 2002, 30(12): 1737-1740.
WANG Guohong, HE You, MAO Shiyi. Performance Analysis of Using an IRST Sensor Cueing a 3D Radar[J]. Acta Electronica Sinica, 2002, 30(12): 1737-1740. (in Chinese) DOI:10.3321/j.issn:0372-2112.2002.12.001 |
| [4] |
张华睿, 杨宏文, 郁文贤. 多目标情况下IRST和雷达的指示交接问题[J]. 电子与信息学报, 2011, 33(5): 1101-1106.
ZHANG Huarui, YANG Hongwen, YU Wenxian. The Handoff Method of IRST and Radar under Multi-Target Scenario[J]. Journal of Electronics & Information Technology, 2011, 33(5): 1101-1106. (in Chinese) |
| [5] |
彭锐晖, 王树宗, 吕永胜, 等. 异地配置下ESM对2D雷达的引导分析[J]. 现代雷达, 2009, 31(1): 13-17.
PENG Ruihui, WANG Shuzong, LYU Yongsheng, et al. Analysis of ESM Cueing 2D Radar Located at Different Sites[J]. Modern Radar, 2009, 31(1): 13-17. (in Chinese) DOI:10.3969/j.issn.1004-7859.2009.01.004 |
| [6] |
吕永胜, 王树宗, 彭锐晖, 等. 异地配置下IRST对3D雷达的引导分析[J]. 红外与激光工程, 2008, 37(5): 911-915.
LYU Yongsheng, WANG Shuzong, PENG Ruihui, et al. Analysis of IRST Cueing to 3D Radar at Different Sites[J]. Infrared and Laser Engineering, 2008, 37(5): 911-915. (in Chinese) DOI:10.3969/j.issn.1007-2276.2008.05.038 |
| [7] |
樊浩, 黄树彩, 李亚军, 等. 3D雷达间引导提示概率分析与仿真[J]. 现代雷达, 2012, 34(4): 9-14.
FAN Hao, HUANG Shucai, LI Yajun, et al. Analysis and Simulation of Cueing Probability among 3D Radars[J]. Modern Radar, 2012, 34(4): 9-14. (in Chinese) DOI:10.3969/j.issn.1004-7859.2012.04.002 |
| [8] |
刘同明, 纪晓恽, 夏祖勋. 多传感器多平台多目标数据融合系统中的数据对准研究[J]. 华东船舶工业学院学报, 1996(3): 31-37.
LIU Tongming, JI Xiaoyun, XIA Zuxun. Data Alignment Development in Multi-Sensor Multiple-Platform Multi-Target System[J]. Journal of East China Shipbuilding Institute, 1996(3): 31-37. (in Chinese) |
| [9] |
唐书娟, 许蕴山, 肖冰松. 无源传感器引导AESA雷达目标搜索[J]. 空军工程大学学报, 2015, 16(3): 30-35.
TANG Shujuan, XU Yunshan, XIAO Bingsong. Passive Sensor Cueing of AESA Radar for Target Searching[J]. Journal of Air Force Engineering University, 2015, 16(3): 30-35. (in Chinese) DOI:10.3969/j.issn.1009-3516.2015.03.007 |
| [10] |
唐书娟, 许蕴山, 毕笃彦, 等. 信息引导条件下雷达搜索空域及策略[J]. 西安电子科技大学学报, 2016, 43(1): 173-179.
TANG Shujuan, XU Yunshan, Bi Duyan, et al. Airspace and Searching Strategy of Radar under the Information Guiding Condition[J]. Journal of Xidian University, 2016, 43(1): 173-179. (in Chinese) DOI:10.3969/j.issn.1001-2400.2016.01.031 |
| [11] | BLACKMAN S, POPOLI R. Design and Analysis of Modern Tracking Systems[M]. Massachusetts, Artech House, 1999 |
| [12] | KATSILIERIS F. Sensor Management for Surveillance and Tracking: an Operational Perspective[D]. Delft, Delft University of Technology, 2015 https://repository.tudelft.nl/islandora/object/uuid%3Ac290585a-8e2d-448a-9b31-52540877195e |
| [13] | SALVAGNINI P, PERNICI F, CRISTANI M, et al. Non-Myopic Information Theoretic Sensor Management of a Single Pan-Tilt-Zoom Camera for Multiple Object Detection and Tracking[J]. Computer Vision & Image Understanding, 2015, 134: 74-88. |
| [14] | Muratore M, Silvestrini R T, Chung T H. Simulation Analysis of UAV and Ground Teams for Surveillance and Interdiction[J]. Journal of Defense Modeling & Simulation, 2014, 11(2): 125-135. |
2. Systems Engineering Research Institute, China State Shipbuilding Corporation, Beijing 100094, China
