

随着高超声速飞行器在超燃冲压发动机、热防护、自主导航等关键技术的突破,高超声速飞行器开始向着武器化方向发展,各国相继启动了高超声速武器的演示验证计划,美国DARPA和空军实验室先后启动了X-51A高超声速飞行器演示验证实验以及后续开展的高超声速武器(HAWC)和高超声速打击计划(HSSW)[1]。从文献中可以看出,高超声速飞行器在进行演示验证飞行试验时,大都采用跟踪基准弹道的方法,事先通过离线设计好高超声速飞行器飞行的基准弹道,其基准弹道满足超燃冲压发动机相关工作条件如进气启动的动压窗口、攻角变化、马赫数以及高度范围等,验证机控制系统只需跟踪基准弹道指令,发出相应的控制时序即可。这种方法控制系统设计简单,易于实现。但是当存在超燃冲压发动机推力、飞行器阻力、大气密度变化时,会造成基准弹道动压变化较大,基至超出超燃冲压发动机进气道启动的边界,使得燃冲压发动机无法正常点火工作。
目前,国内外学者在高超声速飞行器研究方面大都考虑超燃冲压发动机对攻角的约束,以及飞行器自身的气动不确定性,开展控制系统设计研究提出高精度姿态控制和针对不确定性的鲁棒控制等控制方法。闫杰等[2]针对超燃冲压发动机工作时对攻角的约束要求,提出高超声速飞行精细姿态控制方法。文献[3-5]考虑飞行器模型不确定性以及弹性影响,分别设计了高超声速飞行器的鲁棒控制器,保证高超声速飞行器在干扰条件下的姿态控制精度。文献[6-8]把高超声速飞行器纵向模型看作双输入双输出系统,分别利用升降舵和油门开度作为输入量设计高超声速飞行器的高度和速度控制系统,并没有考虑发动机点火工作的约束条件。尤其是考虑超燃冲压发动机进气道对动压的约束影响,进行控制系统设计研究的文献很少。
针对高超声速飞行器超燃冲压发动机对进气道非常敏感这一问题,提出一种直接进行动压反馈直接跟踪动压指令的控制方法,以更好地满足超燃冲压发动机的工作条件。首先建立了高超声速飞行器动压控制的动力学模型,推导了动压控制的小扰动线性化传递函数。然后,利用线性二次型最优控制方法,通过引入动压误差进行控制对象增广,在动压控制回路中引入积分控制,以消除动压跟踪误差,并给出了高超声速飞行器动压控制自动驾驶仪结构。最后,通过仿真验证了动压控制器具有很好的跟踪性能,考虑存在气动、推力不确定性因素,导弹飞行速度出现偏差时,动压控制系统可自适应调整飞行高度以保证对动压指令的跟踪,控制系统具有很好的鲁棒性。
1 高超声速飞行器动力学模型高超声速飞行器的气动外形如图 1所示。

|
| 图 1 高超声速飞行器气动外形 |
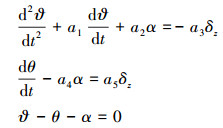
高超声速飞行器采用乘波体构型,超燃冲压发动机为颌下进气,四片尾舵采用正常式气动布局。高超声速飞行器纵向通道动力学模型如下:

|
(1) |
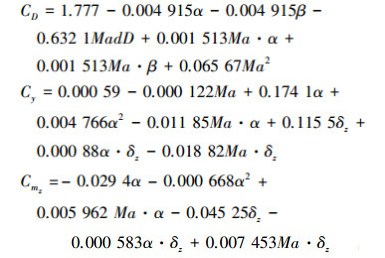
纵向通道法向力、轴向力和俯仰力矩关于攻角、侧滑角、马赫数及俯仰舵偏角的气动模型为:
|
(2) |
通过系数冻结方法, 对高超声速飞行器纵向动力学模型进行小扰动线性化则可得:
|
(3) |
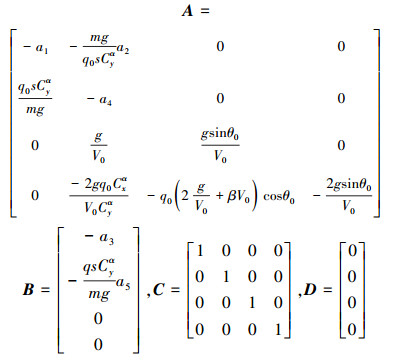
式中, 
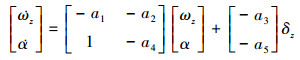
因此, 可以将动力学模型表示成状态方程形式
|
(4) |
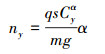
用气动导数表示法向过载有
|
(5) |
式中, Cyα为导弹升力系数对攻角的偏导数。将(5)式代入(4)式可得到以弹体俯仰角速度ωz和法向过载ny为状态的新的状态方程
|
(6) |
巡航导弹的动压计算公式为

|
(7) |
对(7)式进行微分可得
|
(8) |
引入dH对(8)式进行变换得
|
(9) |
根据标准大气密度的计算公式有
|
(10) |
式中, β=1/9 300, 对ρ进行求导得
|
(11) |
高超声速飞行器的高度运动学方程为

|
(12) |
由(1)式得:
|
(13) |

|
(14) |
将(11)~(13)式代入(9)式可得
|
(15) |
通过系数冻结方法, 对(14)式、(15)式进行小扰动线性化, 得到动压状态方程
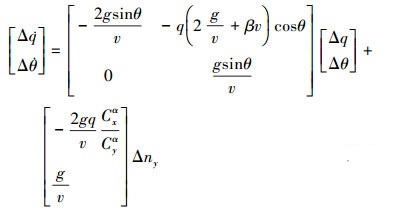
|
(16) |
式中, Cxα为导弹阻力系数对攻角的偏导数。联立(5)式与动压状态方程, 可得到高超声速飞行器动压控制状态方程如下:
|
(17) |
式中, 状态向量

|
定义测量方程为

|
(18) |
式中, H=[0 0 0 1]。
2 高超声速飞行器动压控制系统设计高超声速飞行器动压控制系统设计的目的是使得导弹实际飞行动压能够快速精确地跟踪动压指令, 即(qc-q)→0。定义动压跟踪误差为

|
(19) |
式中, qc为动压指令。为使得高超声速飞行器动压控制系统能够实现对动压的无静差跟踪, 需在最优控制系统中引入动压的积分环节, 为此引入一个新的状态变量eI, 定义动压指令跟踪误差积分为
|
(20) |
假定高超声速飞行器的动压指令为一缓变信号, 对原控制对象
|
(21) |
式中, 状态向量


|
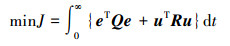
为了保证高超声速飞行器动压控制系统在动压精确跟踪的情况下, 所付出的舵偏量尽可能小, 因此提出以下线性二次型最优性能指标函数
|
(22) |
式中, 误差加权矩阵Q≥0, 控制量加权矩阵R>0。线性二次型最优控制的目的是求解最优控制u*, 使得系统的二次型性能指标函数取极小值。此时最优解对应的微分黎卡提方程为

|
(23) |
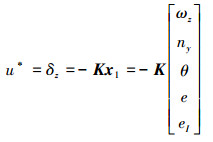
求解最优控制的黎卡提方程, 可以给出满足该性能指标为极小值的LQR最优控制解为
|
(24) |
式中, K=R-1B1TP。
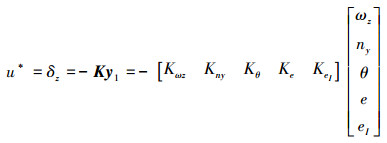
对输出方程进行坐标变换可得

|
(25) |
式中, C1-1=C1=I。因此可将状态反馈转化为输出反馈有
|
(26) |
高超声速飞行器动压控制系统结构如图 2所示。

|
| 图 2 高超声速飞行器动压控制结构框图 |
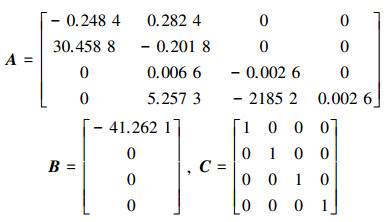
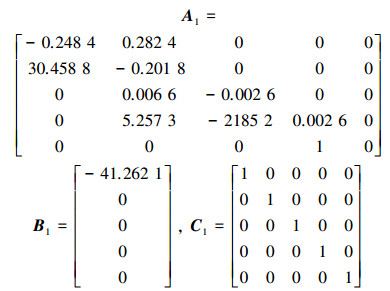
假设高超声速飞行器超燃冲压发动机点火工作时飞行高度H=22 km, 飞行速度Ma=5.4, 超燃冲压发动机工作时动压边界为80±5 kPa, 动压的边界随着马赫数的升高而减小, 因此动压指令是一条理想的曲线。在该飞行条件下, 高超声速飞行器动力学模型为
|
增广后的系数矩阵为
|
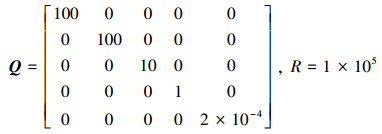
选择最优控制加权阵Q, R如下
|
根据方程(23), 可以求得最优控制阵K如表 1所示。
图 3~图 6给出了动压控制系统的阶跃响应仿真结果。从图 3可以看出, 本文所提出的控制系统的阶跃响应上升时间为1.5 s, 并且实现的对动压指令的无静差跟踪。

|
| 图 3 动压阶跃响应曲线 |

|
| 图 4 俯仰角速度响应曲线 |

|
| 图 5 法向过载响应曲线 |

|
| 图 6 弹道倾角响应曲线 |
为验证动压控制系统的可行性, 在高超声速飞行器六自由度非线性数学模型进行仿真验证。假定超燃冲压发动机工作时飞行高度H=22 km, 飞行速度Ma=5.41, 初值动压为84 kPa, 其比基准动压指令上偏Δq=3 kPa, 超燃冲压发动机点火后, 高超声速飞行器在动压控制系统的作用下跟踪动压指令巡航飞行。为了验证控制系统在扰动作用下的鲁棒性, 在飞行过程中, 分别考虑发动机推力ΔP=±10%的偏差和气动阻力ΔCD=±15%的偏差。选定无扰动状态、能量上偏(ΔP=+10%且ΔCD=-15%)和能量下偏(ΔP=-10%且ΔCD=+15%)3种典型条件进行六自由度仿真, 其结果如图 7~图 12所示。

|
| 图 7 飞行动压曲线 |

|
| 图 8 飞行高度曲线 |

|
| 图 9 飞行马赫数曲线 |

|
| 图 10 飞行法向过载曲线 |

|
| 图 11 飞行攻角曲线 |

|
| 图 12 飞行俯仰舵偏角曲线 |
从仿真结果可以看出, 高超声速飞行器动压控制系统在存在超燃冲压发动机推力ΔP=±10%偏差和气动阻力ΔCD=±15%偏差的情况下, 仍然能够实现对动压指令的无静差跟踪(见图 7)。此外, 采用动压控制, 导弹可以实现高度与速度的自适应调节, 当超燃冲压发动机推力正拉偏10%时且气动阻力负拉偏-15%时, 导弹的飞行速度马赫数比基准条件的马赫数增大约0.32Ma, 如图 9所示, 而飞行高度会自动爬高约0.7 km以保证飞行器动压不变如图 8所示。同理当超燃冲压发动机推力存在负10%偏差且气动阻力正15%偏差时, 导弹的飞行速度比基准条件低约0.32Ma, 此时, 导弹会自动降低飞行高度0.7 km, 以保证超燃冲压发动机的正常工作条件。图 10与图 11分别给出了3种条件下导弹法向过载和攻角曲线, 图中发动机负拉偏条件下导弹的攻角较小, 法向过载却较大, 其原因是由于负拉偏时飞行器的马赫数变小, 导弹的法向力系数随马赫的减小而增大引起的。图 12给出3种条件下导弹的升降舵偏角曲线, 导弹在拉偏条件下用舵量较小, 俯仰舵偏角均大于-7°。
4 结论本文针对高超声速飞行器超燃冲压发动机进气道对动压约束的问题, 提出了一种直接对飞行动压进行闭环控制系统设计方法, 当存在发动机推力等不确定性因素, 引起飞行速度变化时, 动压控制系统能够自适应地调整飞行高度, 以实现对动压指令的精确跟踪, 从而保证了在存在不确定因素时, 超燃冲压发动机的可靠工作。仿真结果验证该方法的正确性。
| [1] | JOHN J SPRAVKA, TIMOTHY R. Jorris. Current Hypersonic and Space Vehicle Flight Test and Instrumentation[C]//AIAA Flight Testing Conference, 2015, Dallas, TX |
| [2] |
闫杰, 于云峰, 凡永华. 吸气式高超声速飞行器控制技术[M]. 西安: 西北工业大学出版社, 2014.
YAN Jie, YU Yunfeng, FAN Yonghua. Airbreathing Hypersonic Vehicle Control Technology[M]. Xi'an: Northwestern Polytechnical University Press, 2014. (in Chinese) |
| [3] |
闫斌斌, 闫杰. 高超声速飞行器的自抗扰控制器设计[J]. 计算机测量与控制, 2012, 20(5): 1307-1309.
YAN Binbin, YAN Jie. Active Disturbance Rejection Control Design for Hypersonic Vehicle[J]. Computer Measurement and Control, 2012, 20(5): 1307-1309. (in Chinese) |
| [4] |
孟中杰, 闫杰. 弹性高超声速飞行器建模及精细姿态控制[J]. 宇航学报, 2011, 32(8): 1683-1687.
MENG Zhongjie, YAN Jie. The Modeling and Fine Attitude Control for Aeroelastic Hypersonic Vehicle[J]. Journal of Astronautics, 2011, 32(8): 1683-1687. (in Chinese) DOI:10.3873/j.issn.1000-1328.2011.08.005 |
| [5] |
孟中杰, 黄攀峰, 闫杰. 高超声速巡航飞行器振动建模及精细姿态控制[J]. 西北工业大学学报, 2011, 29(3): 481-485.
MENG Zhongjie, HUANG Panfeng, YAN Jie. Satisfying Stringent Requirements for Fine Attitude Control of Hypersonic Cruise Vehicle(HCV)[J]. Journal of Northwestern Polytechnical University, 2011, 29(3): 481-485. (in Chinese) DOI:10.3969/j.issn.1000-2758.2011.03.029 |
| [6] | XU B. Dynamic Surface Control of Constrained Hypersonic Flight Models with Parameter Estimation and Actuator Compensation[J]. Asia Journal of Control, 2014, 16(1): 162-174. DOI:10.1002/asjc.2014.16.issue-1 |
| [7] | HUO Y, MIRMIRANI M. Altitude and Velocity Tracking Control for an Airbreathing Hypersonic Cruise Vehicle[C]//AIAA Guidance, Navigation and Control Conference and Exhibit, Colorado, 2006 |
| [8] | FAN Yonghua, WU Xiaofei, XU Hongyang, et al. Design of Lateral Control System for a Hypersonic Cruise missile[C]//21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, 2017 |
| [9] | FAN Yonghua, YAN Pengpeng, WANG Fan, et al. Discrete Sliding Mode Control for Hypersonic Cruise Missile[J]. Discrete Dynamics in Nature and Society, 2016, 38(6): 1-10. |
| [10] | FAN Yonghua, YAN Pengpeng, XU Hongyang, et al. Lateral Control Stratrgy for a Hypersonic Cruise Missile[J]. International Journal of Advanced Robotic Systems, 2017, 14(2): 1-10. |
| [11] | XU Hongyang, YU Yunfeng, GUO Xiaowen, et al. Four-Loop Feedback Control System with Integrator Design for Hypersonic Cruise Missile[C]//21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, 2017 |
