

变循环发动机(variable cycle engine, VCE)至今已有50多年的探索研究与发展历程, 其涡喷工作模式下的大推力、超声速巡航能力以及涡扇工作模式下亚声速巡航的低耗油率可满足新一代战斗机充足的推力要求[1-3]。美国已持续开展了多项变循环发动机研究计划, 研制了2款变循环发动机(F120和F136[4])。与国外的研究成果相比, 国内关于变循环发动机控制系统设计的研究还处于探索阶段。
滑模变结构控制作为一种非线性鲁棒控制方法, 因其所特有的强鲁棒性特点而受到重视, 在电机控制、飞行器姿态控制等方面已有广泛应用[5]。滑模变结构控制的最大优点是对于系统结构匹配不确定性、参数不确定性、未建模动态和外界干扰具有不变性, 这种特点非常适用于变循环航空发动机这种复杂的多变量不确定性系统[6]。然而, 国内关于变循环发动机控制方面的研究较少, 国内学者主要针对传统涡扇发动机滑模控制进行了一定研究。苗广卓研究了基于自适应PSO网络整定的全程滑模控制方法和自适应全局快速非奇异Terminal滑模控制2种方法在航空发动机控制中的应用, 用于改善外部干扰条件下的航空发动机控制效果[7-8]。任立通针对航空发动机参数摄动及外部干扰, 基于鲁棒H∞理论, 设计了具有扰动抑制性能的鲁棒滑模面, 采用自适应技术估计为止干扰上界, 设计了自适应滑模控制器[9]。孙晖对航空发动机多变量滑模控制趋近律及自适应滑模控制方法进行了对比分析, 对比了基于广义不确定项估计、干扰估计、干扰上界估计的自适应滑模控制方法的性能差别[10-11]。Richter等提出将min-max下所有线性控制器(主控制器和限制控制)替换为单变量滑模控制器(SMC), 改善了原结构的不足[12-14]。杜宪提出了基于滑模控制的航空发动机多变量约束管理, 克服了传统方法的保守性, 提高了发动机约束下的动态性能[15]。
本文针对变循航空环发动机滑模控制问题, 在自适应滑模控制基础上引入参考模型, 使系统实现对控制指令的跟踪。通过将误差动态增广到模型中, 并采用LQR方法设计参考模型, 以保证参考输出的动态系能。采用自适应滑模控制方法实现系统存在不确定性和外部干扰条件下的参考状态跟踪。
1 问题的描述变循环发动机控制系统中, 相对增量形式的线性状态空间模型为:
|
(1) |
|
(2) |
式中, 控制变量为:主燃油流量wf、可调尾喷管喉部面积A8以及后涵道可调引射器面积Afavbi; 状态变量为:低压转子转速nl、高压转子转速nh、燃烧室出口总温T4; 被控变量为:低压转子相对换算转速nl, cor、发动机压比Peprs、线性化发动机压比Plepr。
可以看出, 变循环发动机需要实现低压转子转速nl、高压转子转速nh、燃烧室出口总温T4 3个被控变量的精确控制, 才能发挥最大性能。然而传统的滑模控制方法无法对变循环发动机多个被控变量实现直接控制。
采用传统的滑模控制方法设计其控制器时需要分别完成滑函数s的选取以及控制律u的设计。常取滑函数为:

|
(3) |
式中, G为使(A-BK)稳定的反馈增益。
取切换函数为:

|
(4) |
式中, Ξ为对角正定矩阵, 其对角元素为ηi; 向量sign(s)元素为符号函数sign(si), i=1, 2, …, m。

|
(5) |
求解上式可得控制器输入u:

|
(6) |
即:
|
(7) |
由(7)式可见, 传统滑模控制方法通过适当偏移所反馈的对象状态值, 以实现对系统状态指令的间接跟踪。由此可见, 传统的滑模控制方法无法对变循环航空发动机的被控量进行直接跟踪。
2 模型参考自适应滑模控制器设计 2.1 参考模型选取实际航空发动机结构复杂, 其本质上是一个非线性系统。因此, 要采用状态空间模型设计其控制器必须要考虑系统结构的匹配不确定性、参数不确定性、未建模动态和外界干扰等。

|
(8) |
式中, x∈Rn是系统状态矢量, u∈Rm是控制输入, y∈Rm为系统输出, 假设A∈Rn×n, B∈Rn×m, C∈Rm×n和D∈Rm×m是已知的常数矩阵。ΔA, ΔB为摄动矩阵, η(t)为有界未知外部干扰。
假定标称的对象模型为:
|
(9) |
根据(3)式, 定义eyI为ey的积分, 则有:

|
(10) |
其增广开环动态可写为:
|
(11) |
根据(6)式、(2)式、(1)式的调节输出y可写为:

|
(12) |
式中, Caug=[0 C], Daug=D。
设rcmd为常量指令, 利用具有比例+积分(PI)反馈连接LQR方法[14, 17], 设计LQR最优控制律。问题转化为(9)式至(10)式的LQR问题。
|
(13) |
式中, 
反馈形式的最优LQR解为:

|
(14) |
式中, P是对应矩阵黎卡提代数方程唯一的对称正定解, 即:

|
(15) |
对(10)式积分得参考模型输入:
|
(16) |
其中参考模型反馈增益矩阵:
|
(17) |
分块为积分增益KI和比例增益Kp。
选取参考模型以表示期望闭环系统动态, 它可以由LQR方法设计反馈增益带入线性系统(8)式得到。参考模型动态变为:

|
(18) |
式中:

|
(19) |

|
(20) |

|
(21) |
基于状态反馈的滑模控制器作用于对象, 使对象的状态跟踪参考模型计算得到的参考状态, 进而使对象的输出能够跟踪外部指令。
对公式(8)中的对象模型, 控制器的控制目标是跟踪状态参考值, 即:

|
(22) |
取滑函数为:

|
(23) |
式中, G是待求解m×n滑模系数矩阵, 向量e为对象状态量对参考状态的跟踪误差。
为使系统能稳定于滑模运动阶段, 需控制滑函数s在有限时间到达零点, 并在之后保持不变。
即满足可达性条件:

|
(24) |
设计切换函数:

|
(25) |
式中, Ξ为对角正定矩阵, 其对角元素为ηi; 向量sign(s)元素为符号函数sign(si), i=1, 2, …, m。
则:

|
(26) |
令:

|
(27) |
可得控制输入为:

|
(28) |
式中, 滑模系数矩阵G可通过对被控对象进行极点配置计算得到, 也可以通过Utkin和Young提出的二次最小算法得到。
2.3 自适应律设计考虑干扰上界估计和摄动矩阵上界估计的自适应滑模控制。在(8)式所示的系统中, 假设‖ΔA‖

|
(29) |
选取Lyapunov函数为:

|
(30) |
式中,
对(30)式求导, 可得:
|
(31) |
为保证

|
(32) |
式中, ε为一个任意小的正常数。代入(31)式, 可得:
|
(33) |
取自适应律:

|
(34) |

|
(35) |

|
(36) |
通过上述控制器的设计过程分析, 分别在变循环航空发动机不同工况下进行模型参考自适应滑模控制器的设计。
以H=0 km, Ma=0, nl=88%巡航工作点为例进行控制器的设计。该状态下小偏离相对增量形式线性数学模型为:
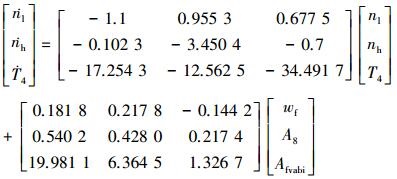
|
(37) |

|
(38) |
利用(11)式对其增广得变循环航空发动机增广开环动态为:
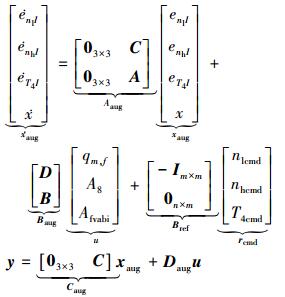
|
(39) |
采用LQR方法设计参考模型时, 参数Q, R如下式所示:
|
将其代入(15)式, 并进行求解可得

|
进而由(19)~(21)式得到参考模型如下:
|

|
依照(29)式、(34)式、(35)式、(36)式设计的自适应律建立了变循环发动机自适应滑模控制器。
4 仿真验证通过以上模型参考自适应滑模控制器设计研究, 在慢车以上包线范围内进行了存在不确定性时, 双外涵变循环航空发动机多变量控制的仿真分析。限于篇幅, 本文现给出高度与马赫数分别为(0, 0), (12, 1.1)2个工作点的仿真结果, 以说明所设计控制器在不同状态时的控制效果。仿真过程中, 不确定参数ΔA, ΔB取为A, B幅值±20%的正弦干扰, 外部扰动η(t)取为方差为0.2的高斯白噪声。其中图 1~图 2为地面状态仿真结果, 图 3~图 4为高空超声速状态仿真结果。

|
| 图 1 H=0 km, Ma=0, nl=88%, 输出参数的仿真结果 |

|
| 图 2 H=0 km, Ma=0, nl=88%, 输入参数变化 |

|
| 图 3 H=12 km, Ma=1.1, nl=96%, 输出参数的仿真结果 |

|
| 图 4 H=12 km, Ma=1.1, nl=96%, 输入参数变化 |
由图 1~4的仿真结果看以看出, 采用模型参考自适应滑模控制方法设计的控制器可以通过调节wf, A8, Afvabi等3个控制实现变循环航空发动机nl, Peprs, Plepr等3个输出量对控制指令的有效跟踪。同时, 不同状态点的控制器均实现了系统存在不确定时的动态跟踪, 且稳态控制误差均小于0.3%, 动态调节时间均小于1 s, 超调量均不大于0.5%, 所有控制指标均满足航空发动机控制系统的技术指标要求。
综上所述, 采用的模型参考自适应滑模控制方法能够实现存在建模不确定性及外部干扰条件下的多变量控制。
5 结论采用引入参考模型的思想对自适应滑模控制方法及其在变循环航空发动机控制系统的中应用进行了研究, 得到了以下结论:
1) 将对象模型进行增广后, 采用LQR方法设计的参考模型可实现多变量控制系统中通道间的解耦, 为滑模控制器的设计提供合适状态参考值, 以实现滑模控制器对输出指令的有效跟踪;
2) 通过李亚普函数对系统存在不确定性时的自适应律进行设计, 该控制器自适应参数均一致渐进有界, 保证了系统的闭环全局稳定和未建模动态不确定性的鲁棒稳定性;
3) 对双转子、双涵道混合排气式变循环航空发动机进行了控制器设计并完成了多个状态点的仿真验证。仿真结果表明:所设计基于LQR方法设计的模型参考自适应滑模控制器在不同状态点均具有良好的静、动态特性, 稳态误差小于0.1%, 超调量小于0.5%, 且调节时间小于1 s, 满足发动机控制性能要求。同时, 改善了模型存在不确定性条件下的控制效果。
| [1] |
樊思齐. 航空发动机控制[M]. 西安: 西北工业大学大学出版社, 2008: 24-27.
Fan Siqi. Aeroengine Control[M]. Xi'an: Northwestern Polytechnical University University Press, 2008: 24-27. (in Chinese) |
| [2] |
姚艳玲, 黄春峰. 先进变循环发动机技术研究[J]. 航空制造技术, 2012(23): 106-109.
Yao Yanling, Huang Chunfeng. Research on Advanced Variable Cycle Engine[J]. Aeronautical Manufacturing Technology, 2012(23): 106-109. (in Chinese) |
| [3] | Krebs J N, Allan R D. Supersonic Propulsion 1970-1977[R]. AIAA-1977-0832 |
| [4] | Allan R D. General Electric Company Variable Cycle Engine Technology Demonstrator Program[R]. AIAA-1973-1311 |
| [5] |
韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 102-159.
Han Jingqing. Active Disturbance Rejection Control Technique——The Technique for Estimating and Compensating the Uncertainties[M]. Beijing: National Defense Industry Press, 2008: 102-159. (in Chinese) |
| [6] |
高为炳. 变结构控制理论基础[M]. 北京: 中国科学技术出版社, 1998.
Gao Weibing. Variable Structure Control Theory Basis[M]. Beijing: Science and Technology of China Press, 1998. (in Chinese) |
| [7] |
苗卓广, 谢寿生, 张波, 等. 航空发动机自适应全局快速非奇异Terminal滑模控制[J]. 航空动力学报, 2013, 28(11): 2634-2640.
Miao Zhuoguang, Xie Shousheng, Zhang Bo, et al. Adaptive Global Fast Non-Singular Terminal Sliding Mode Control for Aero-Engine[J]. Journal of Aerospace Power, 2013, 28(11): 2634-2640. (in Chinese) |
| [8] |
苗卓广, 谢寿生, 何秀然, 等. 自适应PSO网络整定的航空发动机全程滑模控制[J]. 推进技术, 2011, 32(2): 220-224.
Miao Zhuoguang, Xie Shousheng, He Xiuran, et al. Global Sliding Mode Control for Aeroengine Based on PSO Network[J]. Journal of Aerospace Power, 2011, 32(2): 220-224. (in Chinese) |
| [9] |
任立通, 谢寿生, 彭靖波, 等. 航空发动机T-S分布式系统自适应鲁棒滑模控制[J]. 推进技术, 2016, 37(12): 2366-2376.
Ren Litong, Xie Shousheng, Peng Jingbo, et al. Adaptive Robust Sliding Mode Control for Aeroengine T-S Distributed System[J]. Journal of Propulsion technology, 2016, 37(12): 2366-2376. (in Chinese) |
| [10] |
孙晖, 刘尚明, 邓奇超. 航空发动机多变量滑模控制趋近律优化研究[J]. 热力透平, 2015, 44(1): 30-34.
Sun Hui, Liu Shangming, Deng Qichao. Research of Optimizing Sliding Mode Control Using Reaching Law in Aero-Engine[J]. Thermal Turbine, 2015, 44(1): 30-34. (in Chinese) |
| [11] |
孙晖, 刘尚明, 邓奇超. 航空发动机自适应滑模控制方法的比较研究[J]. 燃气轮机技术, 2015, 28(4): 10-15.
Sun Hui, Liu Shangming, Deng Qichao. Comparative Research on Adaptive Sliding Mode Control in Aero-Engine[J]. Gas Turbinge Technology, 2015, 28(4): 10-15. (in Chinese) DOI:10.3969/j.issn.1009-2889.2015.04.002 |
| [12] |
杜宪, 郭迎清, 孙浩, 等. 基于滑模控制的航空发动机多变量约束管理[J]. 航空学报, 2016, 37(12): 3657-3667.
Du Xian, Guo Yingqing, Sun Hao, et al. Sliding Mode Control Based Multivariable Limit Management for Aircraft Engine[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(12): 3657-3667. (in Chinese) |
| [13] | Richter H. Multiple Sliding Modes with Override Logic:Limit Management in Aircraft Engine Controls[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(4): 1132-1142. DOI:10.2514/1.55922 |
| [14] | Richter H. A Multi-Regulator Sliding Mode Control Strategy for Output-Constrained Systems[J]. Automatica, 2011, 47(10): 2251-2259. DOI:10.1016/j.automatica.2011.08.003 |
| [15] | Richter H. Advanced Control of Turbofan Engines[M]. New York: Springer, 2012: 110-113. |
| [16] |
刘金锟. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2005.
Liu Jinkun. Sliding Mode Variable Structure Control MATLAB Simulation[M]. Beijing: Tsinghua University Press, 2005. (in Chinese) |
| [17] | Edwards C, Spurgeon S. Sliding Mode Control: Theory and Application[M]. Washington D C, Taylor and Francis, 1998: 27-48 |
