

转子系统是航空发动机的核心结构, 研究航空发动机转子系统的动力学特性, 前提是建立合理简化的动力学模型。陈予恕等[1]对航空发动机整机动力学进行综述与展望, 指出针对航空发动机结构和工作特点建立合适的简化模型, 通过简化模型定性研究一些重要参数对系统运动行为的规律性影响,对航空发动机系统的设计优化和动态行为的控制有重要的意义。Chiang等[2]研究了汽轮机转子系统的动力学特性, 针对单转子系统将其简化为单跨三盘模型, 针对双转子系统将高低压转子分别简化为双盘模型。陈果[3-4]针对实际航空发动机转子系统建立了一种通用的整机耦合动力学模型, 系统中高、低压压气机和高、低压涡轮分别简化成高、低压压气机盘和高、低压涡轮盘的双盘结构。路振勇等[5]在对某型航空发动机的高压转子系统进行建模时, 将压气机和涡轮等效为一系列圆盘, 针对转子系统中存在的多级悬臂压气机盘结构, 采用的处理方法是忽视悬臂结构并将其集中到一处盘上。以上建模处理都是将转子的压气机和涡轮部分等效为圆盘, 以集中质量的形式集中在其质心位置并考虑转动惯量。当压气机、涡轮直接安装在转轴上时, 这种处理方式是可以满足计算需求的。
然而, 部分发动机转子系统存在异型结构。国内某型动力涡轮转子主要由传动轴和自由涡轮组成, 其中自由涡轮通过法兰盘与传动轴的安装边连接, 构成一种特殊的悬臂式分支结构转子。这种设计使得整个转子在结构上更为紧凑, 可以提升系统的功重比。涡轮盘作用于分支转轴上时, 相对于直接作用在传动轴上, 系统中交叉刚度与陀螺力矩的影响情况会变得更为复杂。若将分支系统按照等效质量、等效转动惯量的方法简化为圆盘并将其集中到转轴上, 会使得转盘质量、转动惯量、转轴抗弯刚度等沿轴向的分布与实际结构产生偏差。这种处理方法是欠妥的, 可能无法满足系统动力特性计算的精度需求。
在转子设计阶段, 如何优化转子结构参数, 达到优化转子模态和降低转子振动的目的, 是学者们一直关注的问题。黄晶晶等[6-7]以减小整体振动为目标, 对双盘转子的转盘位置进行了优化。廖明夫等[8]提出了高压转子的结构动力学设计方法, 为系统支承刚度的优化设计提供参考。然而在一些情况下, 转子的结构参数如直径、跨度、转盘位置等由于受到总体方案的限制使得其可调节的范围很小。针对某型动力涡轮转子中存在的分支结构, 研究能否通过调节分支结构参数来改变系统的动力特性以及设计相应的调节准则, 对于拓宽该类转子系统的结构优化设计思路具有重要的意义, 但目前尚未见相关文献发表。基于此, 本文对某型航空发动机动力涡轮转子的悬臂分支结构进行数学建模, 推导了带分支结构转子系统的运动方程, 通过计算分析, 确定了分支结构的相关设计参数及其对系统动力特性的影响。研究结果可为带分支结构转子系统提供结构参数设计方面的参考。
1 理论分析与建模带悬臂分支结构的转子系统由主转子和分支转子构成。主转子两端支承在轴承上, 轴承处带有弹性支承和阻尼器, 法兰盘安装于主转轴上, 距前支承距离为lf, 设lf为法兰盘偏置量。分支转子和主转子一样由盘轴构成, 其中, 分支轴考虑为一薄壁锥型轴, 长度为lb, 壁厚为tb, 其一端连接涡轮盘而另一端连接法兰盘。涡轮盘与分支轴、法兰盘与主转轴及分支轴之间的连接均为刚性连接。按照分支的安装方位可以将其划分为正向安装和反向安装2种情况, 如图 1所示。

|
| 图 1 转子系统理论模型 |
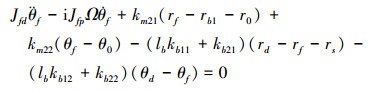
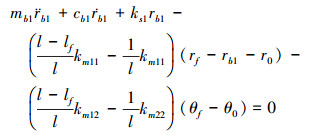
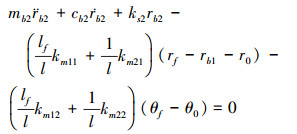
当分支正向安装时, 对于图 1a)所示的模型, 设转子运动任一瞬时, 涡轮盘的形心坐标为(xd, θdy, yd, -θdx), 法兰盘的形心坐标为xf, θfy, yf, -θfx, 两端轴承的中心坐标分别为(xb1, yb1)和(xb2, yb2)。引入复变量:rd=xd+iyd, θd=θdy-iθdx, 类似参量同理。设主转轴和分支轴各向同性, 考虑盘处陀螺力矩的影响, 推导出分支正向安装时系统的运动微分方程如下:

|
(1) |

|
(2) |

|
(3) |
|
(4) |
|
(5) |
|
(6) |
式中,Ω为转子自转角速度; md, mf为涡轮盘质量和法兰盘质量; mb1, mb2为支承1轴承质量和支承2轴承质量; Jdp, Jdd为涡轮盘的极转动惯量和直径转动惯量; Jfp, Jfd为法兰盘的极转动惯量和直径转动惯量; kmij, kbij为主转轴刚度系数和分支转轴刚度系数, 可由材料力学和转子动力学相关知识推导得到; ks1, ks2为弹性支承1刚度和弹性支承2刚度; cb1, cb2为弹性支承1阻尼和弹性支承2阻尼; ε, φ0分别为涡轮盘处的偏心量和相位。
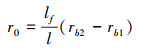
运动方程中, r0和θ0表示不计主转轴弯曲变形时, 法兰盘形心处由于两端支承变形不同所引起的位移和摆角; rs表示涡轮盘形心处由于主转轴弯曲变形(即法兰盘处摆角)所引起的位移。各参数之间有如下关系:

|
(7) |
|
(8) |

|
(9) |
转子系统以角速度ω作同步正进动时, 设转子运动方程的解为:

|
(10) |
Δ中各参数此处不详述。
在计算转子临界转速与振型时, 暂不考虑系统阻尼, 即cd=cb1=cb2=0, Ω=ω=ωn, 求解方程|Δ|=0, 即可求得转子临界转速ωn; 以法兰盘处的位移为参考, 令rf0=1, 将ωn带入方程(11)中, 即可求得转子对应阶的振型。在计算转子不平衡响应时, 给定阻尼值, 令Ω=ω, 带入运动方程中, 即可求得不同转速下的稳态不平衡响应。

|
(11) |
|
(12) |

|
(13) |
当分支反向安装时, 对于图 1b)中所示的转子模型, 涡轮盘与法兰盘之间的位移关系发生了改变。(1)~(6)式中, rd-rf-rs和θd-θf需分别替换为rd-rf+rs和θd+θf, 其余各项保持不变, 即可得到分支反向安装时转子的运动微分方程。
2 数值计算及结果分析在具体进行数值计算时, 采用的转子参数见表 1。
不考虑分支结构时, 采用的处理方法是将涡轮盘的质量和转动惯量等效集中到法兰盘处, 从而将分支集中到主转子上。考虑分支结构时, 分支结构的可调节参数主要有法兰盘偏置量、分支轴长度和分支安装方位。分支结构参数的调节方式有以下4种(见图 2):

|
| 图 2 分支结构参数调节示意图 |
1) 涡轮盘位置不变, 同时调节法兰盘偏置量和分支轴长度;
2) 法兰盘偏置量不变, 只调节分支轴长度;
3) 分支轴长度不变, 只调节法兰盘偏置量;
4) 调节分支安装方位。
2.1 调节分支结构对转子振型的影响考虑分支结构时, 不同支承刚度下转子的前两阶振型变化如图 3所示。可以看出, 系统振型特性主要由支承刚度决定。支承刚度相比转轴刚度较小时, 系统前两阶振型均为刚体振型; 支承刚度相比转轴刚度接近或较大时, 系统一阶振型为弯曲振型, 二阶振型为刚体振型。图中还可以看出调节分支结构参数对转子振型的影响, 其不会改变转子的振型属性, 但是会对振型形态如俯仰程度、弯曲程度等造成影响。

|
| 图 3 考虑分支时转子前两阶振型变化(不同支承刚度) |
不考虑分支结构时, 将涡轮盘等效集中到主转子上, 此时转子的一阶振型变化如图 4所示。

|
| 图 4 不考虑分支时转子一阶振型变化(不同支承刚度) |
对比图 3, 不考虑分支结构时转子的振型形态发生了较大的变化, 以转子一阶弯曲振型为例, 不考虑分支结构时振型最大变形位置在法兰盘左端轴段处; 考虑分支结构时, 振型最大变形位置在涡轮盘处, 而主转轴最大变形位置在法兰盘右端轴段处。
图 5为反向安装分支对系统振型的影响。结果显示, 系统的振型形态如俯仰程度、弯曲程度等均发生了明显的变化。

|
| 图 5 反向安装分支时转子一阶振型变化(不同支承刚度) |
表 2显示了不同支承刚度下, 同时调节法兰盘偏置量和分支轴长度时转子的前两阶临界转速变化。此外, 相应地对比了不考虑分支结构时转子的临界转速。
| (rad·s-1) | |||||||||
| 分支结构 参数变化 lf, lb/m |
考虑分支结构 | 分支集中到主转子上 | |||||||
| k=1×105 N/m | k=2×106 N/m | k=1×105 N/m | k=2×106 N/m | ||||||
| 一阶 | 二阶 | 一阶 | 二阶 | 一阶 | 二阶 | 一阶 | 二阶 | ||
| 0.70, 0.05 | 141.52 | 457.11 | 613.09 | 2029.86 | 148.61 | 447.28 | 610.29 | 2000.31 | |
| 0.65, 0.10 | 141.47 | 456.57 | 597.71 | 2030.23 | 155.12 | 412.24 | 586.50 | 1569.41 | |
| 0.60, 0.15 | 141.18 | 455.61 | 567.70 | 2029.08 | 160.90 | 360.07 | 556.05 | 1158.31 | |
| 0.55, 0.20 | 140.58 | 454.23 | 524.58 | 2025.89 | 165.91 | 307.33 | 529.39 | 945.74 | |
| ω变化率/% | -0.66 | -0.63 | -14.43 | -0.19 | +11.64 | -31.28 | -13.25 | -52.72 | |
计算结果显示:①考虑分支结构时, 同时调节法兰盘偏置量和分支轴长度对转子临界转速的影响和其对应的振型有关。转子显示刚体振型时, 对应的刚体临界转速随分支参数的变化率很小; 转子显示弯曲振型时, 对应的弯曲临界转速随分支参数的变化率较大。②分支集中到主转子上时, 系统临界转速的计算结果在数值大小、变化幅度、变化趋势上均与考虑分支结构时的计算结果有较大的差别。
2.2.2 调节方式2、调节方式3对转子临界转速的影响只调节分支轴长度时转子前两阶临界转速变化如表 3所示。只调节法兰盘偏置量时转子前两阶临界转速变化如表 4所示。
| (rad·s-1) | |||||
| 参数变化 lb/m (lf=0.55 m) |
k=1×105 N/m | k=2×106 N/m | |||
| 一阶 | 二阶 | 一阶 | 二阶 | ||
| 0.05 | 162.03 | 461.49 | 553.98 | 2 048.11 | |
| 0.10 | 155.47 | 459.24 | 557.01 | 2 041.34 | |
| 0.15 | 148.19 | 456.75 | 546.71 | 2 033.86 | |
| 0.20 | 140.58 | 454.23 | 524.58 | 2 025.89 | |
| ω变化率/% | -13.23 | -1.57 | -5.30 | -1.08 | |
| (rad·s-1) | |||||
| 参数变化 lf/m (lb=0.05 m) |
k=1×105 N/m | k=2×106 N/m | |||
| 一阶 | 二阶 | 一阶 | 二阶 | ||
| 0.70 | 141.52 | 457.11 | 613.09 | 2 029.86 | |
| 0.65 | 148.86 | 458.47 | 603.84 | 2 034.99 | |
| 0.60 | 155.78 | 459.95 | 580.70 | 2 041.09 | |
| 0.55 | 162.03 | 461.49 | 553.98 | 2 048.11 | |
| ω变化率/% | +14.49 | +0.95 | -9.64 | +0.89 | |
由计算结果可以看出, 随着分支轴长度的增大, 转子的刚体临界转速和弯曲临界转速都逐渐减小; 随着法兰盘偏置量的减小, 转子的刚体临界转速逐渐增大, 而弯曲临界转速逐渐减小。
由此可以解释2.2.1节的结论:转子显示刚体振型时, 增大分支轴长度和减小法兰盘偏置量引起的临界转速的变化趋势相反, 在相互抵消的作用下, 刚体临界转速的变化率很小; 转子显示弯曲振型时, 增大分支轴长度和减小法兰盘偏置量引起的临界转速的变化趋势相同, 在相互增益的作用下, 弯曲临界转速的变化率较大。
2.2.3 调节方式4对转子临界转速的影响从图 6可以看出, 调节分支安装方位对转子临界转速的影响同样与其振型相关。分支安装方位由正向变为反向时, 转子的刚体临界转速增大, 而弯曲临界转速减小。从变化率来看, 转子的一阶刚体临界转速和一阶弯曲临界转速均发生了较大的变化, 平均有21.8%和20.9%, 说明调节分支安装方位会对转子的临界转速产生较大的影响。

|
| 图 6 调节分支安装方位对转子临界转速的影响 |
图 5显示弯曲振型下系统涡轮盘处的变形响应最大, 因此选取ks=2×106 N/m, 计算了调节分支轴长度和法兰盘偏置量对系统涡轮盘、法兰盘处的振动响应的影响, 结果如图 7所示。

|
| 图 7 改变分支轴长度和法兰盘偏置量对转子不平衡响应的影响 |
由计算结果可以看出, 随着分支轴长度的增大和法兰盘偏置量的减小, 转子系统的抗弯刚度逐渐减小, 涡轮盘和法兰盘处的不平衡响应逐渐增大。
2.3.2 调节方式4对转子不平衡响应的影响调节分支安装方位对转子涡轮盘处不平衡响应的影响如图 8所示。可以看出, 转子分支由正向安装变为反向安装时, 涡轮盘处的响应振幅由0.223 mm增大到0.766 mm, 增长幅度为243%, 说明反向安装分支会减小转子系统的抗弯刚度, 导致涡轮盘处的不平衡响应急剧增大。

|
| 图 8 改变分支安装方位对涡轮盘处响应的影响 |
1) 在计算带分支结构转子系统的动力学特性如振型、临界转速时, 对比考虑分支结构的处理方法和将分支结构集中到主转子上的处理方法, 两者在计算结果上存在较大差异, 前者更为合理。
2) 调节分支结构参数不会改变转子系统的振型属性, 但可以改变振型形态(俯仰程度、弯曲程度等)。
3) 调节分支结构参数可以调节转子系统的临界转速, 但调节效果与相应的振型有关。具体来讲, 单独调节分支轴长度和单独调节法兰盘偏置量对弯曲临界转速的调节效果相同, 而对刚体临界转速的调节效果相反; 同时调节分支轴长度和法兰盘偏置量可以有效调节弯曲临界转速, 而对刚体临界转速的调节效果微弱; 调节分支安装方位对刚体临界转速和弯曲临界转速的调节效果相反, 且效果均较明显。
4) 增大大分支轴长度、减小法兰盘偏置量以及反向安装分支, 都会减小转子系统的抗弯刚度, 降低系统临界转速, 同时带来涡轮盘处不平衡响应急剧增大的问题。因此, 需要针对分支结构参数进行合理设计以避免出现振动过大的问题。
| [1] |
陈予恕, 张华彪. 航空发动机整机动力学研究进展与展望[J]. 航空学报, 2011, 32(8): 1371-1391.
Chen Yushu, Zhang Huabiao. Review and Prospect on the Research of Dynamics of Complete Aero-Engine Systems[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(8): 1371-1391. (in Chinese) |
| [2] | Chiang H W D, Hsu C N, Tu S H. Rotor-Bearing Analysis for Turbomachinery Singleand Dual-Rotor Systems[J]. Journal of Propulsion & Power, 2004, 20(6): 1096-1104. |
| [3] |
陈果. 双转子航空发动机整机振动建模与分析[J]. 振动工程学报, 2011, 24(6): 619-632.
Chen Guo. Vibration Modeling and Analysis for Dual-Rotor Aero-Engine[J]. Journal of Vibration Engineering, 2011, 24(6): 619-632. DOI:10.3969/j.issn.1004-4523.2011.06.007 (in Chinese) |
| [4] |
陈果. 航空发动机整机振动耦合动力学模型及其验证[J]. 航空动力学报, 2012, 27(2): 241-254.
Chen Guo. A Coupling Dynamic Model for Whole Aero-Engine Vibration and Its Verification[J]. Journal of Aerospace Power, 2012, 27(2): 241-254. (in Chinese) |
| [5] |
路振勇, 陈予恕, 李洪亮, 等. 航空发动机转子系统动力学模型的可逆化简化方法[J]. 航空动力学报, 2016, 31(1): 57-64.
Lu Zhenyong, Chen Yushu, Li Hongliang, et al. Reversible Model-Simplifying Method for Aero-Engine Rotor Systems[J]. Journal of Aerospace Power, 2016, 31(1): 57-64. (in Chinese) |
| [6] |
黄晶晶, 郑龙席, 王治武, 等. 双盘转子系统动力特性分析及优化设计[J]. 推进技术, 2014, 35(11): 1530-1536.
Huang Jingjing, Zheng Longxi, Wang Zhiwu, et al. Dynamical Characteristics Analysis and Optimization of a Two-Disk Rotor System[J]. Journal of Propulsion Technology, 2014, 35(11): 1530-1536. (in Chinese) |
| [7] |
黄晶晶, 郑龙席, 刘钢旗, 等. 双盘转子系统优化算法与试验[J]. 航空动力学报, 2016, 31(1): 65-71.
Huang Jingjing, Zheng Longxi, Liu Gangqi, et al. Optimization Algorithm and Experiment of a Two-Disk Rotor System[J]. Journal of Aerospace Power, 2016, 31(1): 65-71. (in Chinese) |
| [8] |
廖明夫, 谭大力, 耿建明, 等. 航空发动机高压转子的结构动力学设计方法[J]. 航空动力学报, 2014, 29(7): 1505-1519.
Liao Mingfu, Tan Dali, Geng Jianming, et al. Structure Dynamics Design Method of Aero-Engine High Pressure Rotor[J]. Journal of Aerospace Power, 2014, 29(7): 1505-1519. (in Chinese) |
