

2. 沈阳飞机设计研究所, 辽宁 沈阳 110035
机载多传感器探测可以使感知能力达到最大化,然而,复杂的传感器资源环境容易存在以下几项问题:①资源闲置或浪费;②资源重用率过高;③任务遗漏。为解决上述问题,需要实现任务的有效分配和资源的充分合理调用。
传感器任务分配的起源可以追溯到20世纪70年代,Zeng D采用线性规划的方法研究单平台传感器追踪多目标的分配问题[1];Yan T以线性规划理论为基础,使用布尔矩阵定义了一种围绕传感器能力和有效性开展规划的目标配对方法,利用传感器性能模型预测传感器对目标执行能力[2];Ramdaras提出了一种以最大检测概率为目标的传感器动态规划管理方法[3];吴巍采用目标与资源的配对函数和目标优先级两部分作为效能函数基本组成,最后以效能函数作为目标函数来实现规划[4]。
随着传感器与目标数量逐渐增多,传统的数学规划算法难以获得最优解,学者们开始考虑将智能搜索类优化算法[5-6]引入传感器管理规划领域,如朱卫宵将蚁群算法引入到传感器管理领域取得了良好的管理效果[7]。随着智能优化算法被引入任务规划领域,研究人员们发现对算法进行改进有助于提高规划效率与规划能力,如杨啸天将遗传算法与粒子群算法应用于传感器目标分配,提高了稳定性并加快了收敛速度[8];刘文凯提出一种远离最差解的粒子群算法,在搜索速度、精度等多个方面均起到了显著的优化效果[9]。针对机载多传感器任务分配问题的特点,本文在借鉴传统粒子群算法的基础上对其进行适当改进,有效提高了机载多传感器任务分配的效率。
1 问题描述本文针对机载多传感器任务分配问题展开研究,根据多传感器任务分配特点,将问题以数学模型形式描述为目标任务x到传感器y的映射, 完成多传感器与多目标之间资源调配。本文针对战场随机态势提出解决方案, 为此做出以下条件假设:
1) 传感器与任务数量已知, 传感器数量为m, 任务数量为n;
2) 传感器执行任务能力有限, 单次规划每个传感器最大执行任务数量为2个;
3) 传感器与目标空间位置固定且空间坐标已知。
2 基于改进粒子群算法的机载多传感器任务分配建模粒子群算法是由Eberhart和Kennedy于1995年提出的一种全局搜索算法[10], 它源于对鸟类捕食行为的模拟, 进化规则是群体向着当前最优状态前进, 但与此同时, 由于粒子的优化方向是历史最优粒子方向, 迭代容易陷入局部最优中造成过早收敛而无法找到全局最优, 因此算法的全局搜索能力易受到限制。针对传统粒子群算法的这一不足, 在机载多传感器任务分配问题中, 对粒子群算法作如下改进设计:
1) 采取十进制粒子编码, 粒子向量Xi(第i个粒子向量)中的分量依序代表分配给该任务的资源, 若粒子所属为R维空间, 则

|
式中, M为种群规模;
2) 寻找并记录历史个体最劣解和全局最劣解, 分别记为Pworsti和Gworsti, 使粒子在向着最优状态前进的同时可以远离最劣解;
3) 引入个体远离因子和全局远离因子用于控制粒子远离最劣解和接近最优解快慢的程度, 引入方向系数作为远离因子的参数, 用于控制粒子的远离方向, 同时将远离因子与学习因子和随机参数联系起来, 这样既可以有效避开由局部最优解造成的收敛盲区, 又可以防止粒子运动过于发散而错过最优解。
2.1 粒子群算法改进基于上述改进设计, 构造改进粒子群算法(improved particle swarm optimization, 简称IMPSO算法)。首先, 定义方向系数:
|
(1) |
式中,Nd为最大迭代次数, t为当前迭代次数, 通过方向系数的调节使仿真在初始阶段的搜索范围较大, 尾声阶段搜索范围较小, 防止搜索过程中粒子运动过于发散。
结合群体向最优粒子进化的加速常数sp和sg以及属于[0, 1]的随机常数rp(t)和rg(t), 计算个体远离因子b1

|
(2) |
全局远离因子b2
|
(3) |
在粒子群算法基础上改进的第i个粒子速度Vi和位置Xi更新方法为:
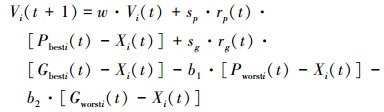
|
(4) |

|
(5) |
公式(4)中w为惯性权重, 用来控制算法的收敛程度, 一般取0.8到1.2之间, 此时有较快的收敛速度, 且具有均衡的全局收敛和局部收敛能力。Pbesti为个体最优解, Gbesti为全局最优解。
2.2 多传感器任务分配建模采用改进后的粒子群算法解决机载多传感器任务分配问题, 建立粒子模型与目标函数模型。
2.2.1 粒子模型本文将粒子的建模分为两部分, 一是粒子编码, 二是初始种群建模。
首先, 本文中粒子编码采用整数编码的方式, 由于本文问题背景要求每个任务必须要有与其匹配的传感器资源, 同时还要满足传感器资源的最大任务执行数量限制, 因此建立粒子模型的维数等于任务总数, 每个分量由从左至右按顺序排列的分量编号对应为任务编号, 每个分量值对应该任务被分配的资源编号, 若同一个分量下的值不同则视为不同的规划方案, 即当有m个资源, n个任务时, 第j个粒子向量表示为:
|
(6) |
(6) 式表示1号任务由s1传感器执行, 2号任务由s2传感器执行, 以此类推, n号任务由sn传感器执行。除此之外, 粒子模型应满足单个传感器资源执行的任务总数不超过其最大任务能力数。
其次, 初始种群建模。每个粒子对应一个该问题的可行解, 粒子群便是由多个这样的粒子组成的, 若以矩阵形式表示粒子群, 则矩阵的每一行由一个粒子向量组成, 矩阵的总行数便是粒子群的规模大小M。种群大小对算法的运行效率会产生一定影响, 若M太大, 会降低算法寻优速度, 但若M太小会降低种群多样性, 使结果过早收敛, 故种群规模大小的取值范围一般在30到60之间[11]。
初始种群的选取通常是随机的, 这样既简单又保证了种群的多样性, 只要在算法执行前确定种群规模、资源数量和任务数量以及资源限制便可以得到一个随机的初始种群, 进而进行下一步迭代。
2.2.2 目标函数模型为完成多传感器任务分配, 需选择一个适应度函数作为优化的目标函数。本文以最大探测概率为目标函数进行任务分配, 探测概率模型[12]以信噪比作为主要输入参数, 将虚警率视为消耗因子:

|
(7) |
|
(8) |
式中, Pf为传感器虚警率, RSN为信噪比, RSN∝1/Rk4, Rk为k号任务目标和指定资源间的距离。
本文以粒子所代表分配方案的平均探测概率作为寻优的适应度函数, 也即多传感器任务分配的目标函数:
|
(9) |
根据前述改进粒子群算法和机载多传感器任务分配建模的方法, 得到改进粒子群算法的流程图如图 1所示。

|
| 图 1 改进粒子群算法流程图 |
利用改进粒子群算法对本文所研究的机载多传感器任务分配问题进行求解, 以验证改进算法的性能优劣。仿真算例设置如下:在空间区域为20 km*20 km*15 km的空战场中存在m=10的资源和n=15的目标任务, 资源与目标位置随机生成, 每个资源可处理最多2个任务, 惯性权重w设为1, 加速常数sp设为1.5, sg设为1.2, 速度上限为2, 虚警率为0.2, 每次仿真进行300次迭代, 进行2次仿真, 得到改进粒子群算法的适应度变化曲线如图 2和图 3所示。

|
| 图 2 改进粒子群算法适应度曲线(1) |

|
| 图 3 改进粒子群算法适应度曲线(2) |
由于粒子初始位置和转移过程具有随机性, 加上每次仿真时资源与目标位置也是随机生成的, 使得每次仿真结果会存在一定差异, 但通过观察图 2、图 3的适应度, 发现适应度均会在迭代初始便达到0.3左右, 且随着进化次数增加逐渐升高, 最终呈收敛状态, 说明在不同战场态势环境下改进粒子群算法具有良好的寻优收敛效果。通过观察发现图中曲线发生多次跳变, 这说明改进粒子群算法能够成功跳出局部收敛寻找到更优解。
通过上述分析可知改进粒子群算法可以有效进行可行解寻优, 为了验证改进粒子群算法的优势, 在上述仿真算例基础上, 设计对比算例实验, 设置传感器与任务目标三维坐标如表 1、表 2所示。
| 编号 | 坐标/km |
| 1 | (8.1, 14.4, 0.6) |
| 2 | (3.4, 3.6, 9.2) |
| 3 | (5.7, 13.4, 2.7) |
| 4 | (8.2, 11.2, 3.9) |
| 5 | (9.4, 16.7, 12.7) |
| 6 | (9.9, 5.8, 9.8) |
| 7 | (15.1, 8.1, 5.7) |
| 8 | (3.5, 8.1, 6.8) |
| 9 | (7.4, 1.1, 0.1) |
| 10 | (2.9, 16.9, 9.6) |
| 11 | (18.6, 4.3, 12.5) |
| 12 | (17.7, 14.6, 4.5) |
| 13 | (13.1, 9.9, 7.1) |
| 14 | (9.5, 5.5, 4.4) |
| 15 | (8.9, 17.4, 2.6) |
| 编号 | 坐标/km |
| 1 | (11.3, 12.6, 4.4) |
| 2 | (10.1, 16.6, 4.6) |
| 3 | (10.7, 14.8, 9.8) |
| 4 | (8.1, 4.6, 5.6) |
| 5 | (18.0, 12.8, 7.0) |
| 6 | (0.1, 10.6, 11.5) |
| 7 | (5.5, 13.0, 10.0) |
| 8 | (1.9, 14.4, 4.1) |
| 9 | (1.7, 12.4, 2.5) |
| 10 | (17.2, 5.0, 14.7) |
将本文所采用的IMPSO方法与同为远离最劣解的LMPSO方法[9]进行比较, LMPSO方法在粒子群算法基础上增加了远离个体最劣解的方法, 但并未对加速系数作出调整。同时使用IMPSO和LMPSO进行500次迭代寻优, 得到结果如图 4所示。

|
| 图 4 算法改进后适应度对比图 |
由图 4可以看出, 针对机载多传感器任务分配问题, 2种粒子群算法均能使结果收敛, 但IMPSO能够先于LWPSO算法发现更优解, 在有限次迭代内收敛效果更优, 大大提高了算法效率。由于本文所涉及的问题为整数规划问题, 粒子速度只能以整数形式体现, 相比LWPSO算法而言, IMPSO算法具有更松弛的速度调整机制, 能够防止高速变化导致的最优解失踪情况, 因此能够更快找到个体最优解并有效防止局部收敛。在上述算例下, 算法可在当前搜索范围内获得已搜索空间内的机载多传感器任务分配的最优解, 如表 3所示。
通过观察表 3中的分配结果可以发现规划结果符合每个资源最多指派2个任务的限制条件,2号、6号、7号、8号、9号资源得到了重复利用。
4 结论本文提出了一种以最大探测概率为目标函数的机载多传感器任务分配问题的解决方法,建立了机载多传感器任务分配模型,针对传统粒子群算法过早进入局部收敛的不足,设计了改进粒子群算法及多传感器任务分配模型求解达到最大探测能力的分配方案,从仿真案例的寻优结果可以看出本文提出的方法针对机载多传感器任务分配问题具有较好的寻优效果,从适应度变化情况可以看出,算法能够有效跳出当前局部收敛状态,寻找到更优解,相对于同类粒子群优化方法,提高了求解效率。
| [1] | Zeng D, Li P, Guo S, et al. Energy Minimization in Multi-Task Software-Defined Sensor Networks[J]. IEEE Trans on Computers, 2015, 64(11): 3128-3139. DOI:10.1109/TC.2015.2389802 |
| [2] | Yan T, Han C. Sensor Management for Multi-Target Detection and Tracking Based on PCRLB[C]//International Conference on Information Fusion, 2017: 1-6 |
| [3] | Ramdaras U D, Bolderheij F. Performance-Based Sensor Selection for Optimal Target Tracking[C]//International Conference on Information Fusion, 2009: 1687-1694 |
| [4] |
吴巍, 李朝霞, 刘博, 等. 基于多智能体与市场理论的多机载平台传感器管理[J]. 系统工程与电子技术, 2014, 36(1): 68-75.
Wu Wei, Li Zhaoxia, Liu Bo, et al. Study on Multi-Airborne-Platform Sensor Management Based on Multi-Agent and Market Theory[J]. Systems Emngineering and Electronics, 2014, 36(1): 68-75. (in Chinese) |
| [5] | Nan Hu, Diego Pizzocaro, Matthew P Johnson, et al. Resource Allocation with Non-Deterministic Demands and Profits[C]//IEEE International Conference on Mobile Ad-Hoc and Sensor Systems, 2013, 145-153 |
| [6] | Tkach I, Jevti A, Nof S Y, et al. A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation[J]. Sensors, 2018, 18(3): 759. DOI:10.3390/s18030759 |
| [7] |
朱卫宵, 祝前旺, 陈康. 基于改进蚁群算法的海上编队传感器资源分配模型[J]. 计算机与现代化, 2014(12): 15-18.
Zhu Weixiao, Zhu Qianwang, Chen Kang. Sea Fleet Sensor Resource Allocation Model Based on Improved Ant Colongy Algorithm[J]. Computer and Modernization, 2014(12): 15-18. DOI:10.3969/j.issn.1006-2475.2014.12.004 (in Chinese) |
| [8] |
杨啸天, 冯金富, 冯媛, 等. 基于遗传粒子群的多传感器目标分配算法[J]. 电光与控制, 2011, 18(3): 5-8.
Yang Xiaotian, Feng Jinfu, Feng Yuan, et al. A Multi-Sensor Target Assignment Algorithm Based on Genetic Particle Swarm Optimization[J]. Electronics Optics & Control, 2011, 18(3): 5-8. DOI:10.3969/j.issn.1671-637X.2011.03.002 (in Chinese) |
| [9] |
刘文凯, 温洁嫦. 远离最差解的粒子群优化算法[J]. 广东工业大学学报, 2017, 34(4): 78-83.
Liu Wenkai, Wen Jiechang. An Improved Particle Swarm Algorithm Far Away form Worst Solution[J]. Journal of Guangdong University of Technology, 2017, 34(4): 78-83. (in Chinese) |
| [10] | Kennedy J, Eberhart R. Particle Swarm Optimization[C]//IEEE International Conference on Neural Networks, 1995: 1942-1948 |
| [11] | 叶文, 范洪达, 朱爱红. 无人飞行器任务规划[M]. 北京: 国防工业出版社, 2011. |
| [12] |
侯道琪, 齐锋, 杨正. 应用于作战仿真的雷达发现概率计算模型[J]. 电子信息对抗技术, 2016, 31(1): 61-64.
Hou Daoqi, Qi Feng Yang Zheng, Yang Zheng. Models for Radar Detection Probability Based on Operation Simulation[J]. Electronic Information Warfare Technology, 2016, 31(1): 61-64. DOI:10.3969/j.issn.1674-2230.2016.01.013 (in Chinese) |
2. Shenyang Aircraft Design & Research Institute, Shenyang 110035, China
