

目前, 为了设计一个良好的控制系统, 依据调节原理和现代控制理论方法, 必须在对系统运动规律了解的前提下构建数学模型, 还要掌握系统所在的环境情况。然而, 在实际应用中, 要对复杂的系统实现准确建模是很困难的, 除此之外, 有些系统即使可以获得其精确模型, 但由于系统阶次过高或所处环境难以预测, 不利于控制器设计。
针对实际应用中被控对象精确建模困难的问题, 吴宏鑫首先提出了特征建模的思想[1-4]。特征建模就是指根据对象动力学特征、环境特征和控制性能要求相结合进行建模, 不再是仅以对象精确动力学分析来建模。特征建模主要有以下几个特点:①特征模型与被控对象具有等效的输入-输出特性; ②特征模型比被控对象的动力学模型简单, 易于控制器的设计和实现; ③相对高阶系统的降阶简化模型, 特征模型不存在信息丢失问题, 而是将高阶信息全部压缩在特征参量里。
由于特征模型与实际被控对象具有等效的输入-输出特性, 因此特征模型可以替代实际被控对象进行输出反馈控制系统设计。目前常见的特征模型形式为离散的二阶差分方程, 利用系统的输入、输出和系统辨识方法对差分方程中的系数进行估计。由于系统辨识的收敛速度慢, 为保证系统的稳定性, 一般要求被控对象为定常或慢时变的, 使得方法具有一定的局限性。针对上述问题, 本文提出一种用二阶线性时变微分方程描述的连续特征模型, 并与自适应控制结合。
由于特征模型的阶次低、特征参量少, 特征参量中往往包含大量实际复杂系统的不确定项和高阶信息, 因此本文提出的连续特征模型是一个具有参数大范围、快时变特点的二阶线性时变系统。
针对线性时变系统的自适应控制方法研究已经成为了许多领域里的研究热点。早期利用确定性等价原理[5]的方法, 但是受被控对象参数的导数影响, 一旦参数是快时变的, 控制性能很难改善。反演法[6]引入了一些非线性设计理念, 使得跟踪性能有所改善, 但是, 如果将其由线性定常系统直接推广到线性时变系统, 系统稳定性无法保证且跟踪误差与参数的变化率成正比。在反演法基础上, 通过引入一阶低通滤波器而提出了动态面控制, 并广泛应用于线性系统、非线性系统、随机系统等领域[7-9]。针对线性时变系统, 文献[10]提出一种具有鲁棒性的自适应动态面控制方法, 即使在参数快时变的条件下也能保持良好的跟踪性能。
本文将连续特征模型和动态面控制相结合, 提出一种新型的自适应控制方法, 其优点在于控制系统设计不再依赖被控对象的复杂动力学模型, 仅利用系统输出信息便可实现高性能的输出反馈控制。
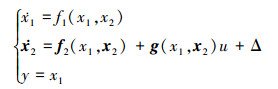
1 问题描述飞行器的姿态动力学方程一般是具有如下形式的仿射非线性系统:
|
(1) |
式中, u∈R和y∈R是系统输入和输出; x1∈R和x2∈Rn-1是系统状态量; f1∈R, f2∈Rn-1和g∈Rn-1是未知的光滑可微函数; Δ∈Rn-1表示系统未知的不确定项。
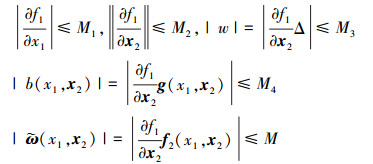
假设1 非线性系统(1)有且仅有唯一的平衡点—原点, 并且存在未知常数M1, M2, M3, M4和M满足下述不等式
|
假设2 b(x1, x2)的大小未知, 但符号是已知的且保持不变, 不失一般性, 文中假设b(x1, x2)>0。
注1 假设1和2在许多实际工程应用中都是成立的, 另外, 不等式
本文的主要目的是在非线性系统(1)的内部状态量x2, 光滑可微函数f1, f2, g和不确定项Δ均未知的情况下, 设计一种输出反馈自适应控制律使得系统输出收敛到平衡点(原点)附近任意小的邻域内, 同时保证闭环系统的稳定性。
2 基于连续特征模型的自适应控制律目前大部分关于非线性系统控制的文献重点研究系统内部状态量x2和不确定项Δ未知的情况下控制律设计问题, 可以设计状态和干扰观测器对x2和Δ进行精确的估计, 利用其估计值设计具有鲁棒性的控制律。但是, 一旦在非线性系统(1)中的光滑可微函数f1, f2, g也未知的情况下, 上述控制方法的控制性能将显著下降甚至导致闭环系统失稳。
针对上述问题, 文中提出一种基于连续特征模型的新型自适应控制方法, 可以在内部状态量x2, 光滑可微函数f1, f2, g和不确定项Δ均未知的情况下, 既能使系统输出收敛到平衡点(原点)附近任意小的邻域内, 也能保证闭环系统的稳定性。
2.1 连续特征模型考虑到非线性系统(1)的内部状态量x2, 光滑可微函数f1, f2, g和不确定项Δ均未知, 为了便于控制器设计, 文中构造了一种新型的二阶连续特征模型。二阶连续特征模型具有如下特点:①特征模型是二阶线性时变系统, 且时变特征参数是未知的; ②特征模型与非线性系统(1)具有等效的输入-输出特性, 可以替代原系统进行输出反馈控制器设计; ③特征模型形式简单, 仅利用系统输出即可完成输出反馈控制系统设计, 控制器结构简单、工程易实现。
在控制系统设计过程中, 连续特征模型将替代原非线性系统, 因此将原本复杂的非线性控制问题转化为更加简单的具有未知时变参数的二阶时变线性系统控制问题。
定理1 仿射非线性系统(1)的输入-输出特性与下述二阶线性时变微分方程等价

|
(2) |
式中, 

证明 由于

|
(3) |
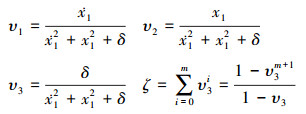
设δ是满足不等式δ>1的任意常数, 并定义
|
(4) |
式中, m是正整数, υ1, υ2, υ3和ζ均为有界的且满足|υ1| < 1, |υ2| < 1, |υ3|≤1和|ζ| < m+1。
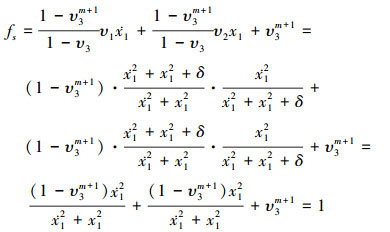
定义fs是压缩映射函数, 其表达式为

|
(5) |
根据(1)式和(4)式可知, 压缩映射函数具有fs≡1的特性, 简单的推导过程如下
|
(6) |
结合(5)式和(6)式, 可将(3)式改写为
|
(7) |
因y=x1, 将(7)式改写为

|
(8) |
式中, a1, a0, b0和d为特征模型的时变特征参数。
|
(9) |
注2 在定理1的证明过程中, δ和m可以在一定约束范围内任意选取, 压缩映射函数fs不是唯一的, 即非线性系统(1)的连续特征模型(8)中特征参数不是唯一的。从严格意义上讲, 定理1主要作用是证明了二阶连续特征模型的存在性, 由于特征参数不具有唯一性, 因此也无法事先确定特征参数的真实值。
注3 与传统的降阶简化模型相比, 虽然非线性系统(1)与其特征模型(8)结构形式存在较大差异, 但是二者具有完全等效的输入-输出特性。这是因为特征模型将原系统中的高阶项、未知项和不确定项等通过压缩映射函数fs隐含在特征参数中, 而没有丢失任何信息。由于特征参数中包含了与原非线性系统中x2, f1, f2, g和Δ相关的未知信息, 因此特征参数一般具有大范围、快时变的特点。
2.2 自适应控制律设计根据定理1可知, 二阶连续特征模型(8)与仿射非线性系统(1)具有完全等效输入-输出特性, 因此可以利用输入-输出等效的连续特征模型(8)替代原非线性系统模型(1)进行输出反馈控制律设计。
首先, 将特征模型(8)改写成状态空间形式

|
(10) |
式中, u∈R和y∈R是系统的输入和输出; 系统状态向量为x=[x1, x2]T∈R2; 并且
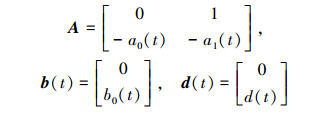
|
式中, a1(t), a0(t), b0(t)和d(t)是未知的时变特征参数, 但是b0(t)的符号是已知的, 由假设2和(9)式可得, b0(t)>0。
考虑到特征参数具有大范围、快时变的特点, 文中采用具有强鲁棒性的动态面控制方法进行控制律设计。
Step1 定义第1个误差面为

|
(11) |
联合(10)式, 对上式求导可得

|
(12) |
式中, c1>0为设计参数, α1是需要设计的虚拟控制量, 使得(12)式在先忽略(x2-α1)项的情况下稳定。
选取虚拟控制量α1为
|
(13) |
令α1经过时间常数为τ2的一阶滤波器, 获得新的状态变量x2d

|
(14) |
Step2 定义第2个误差面为

|
(15) |
对上式求导可得

|
(16) |
式中, c2>0为设计参数, 且
|
(17) |
式中, θ是由未知的特征参数所构成的未知参数向量, 可设计自适应律对其进行估计。
设未知参数向量θ的估计误差为

|
(18) |
式中, 
|
(19) |
式中, Γ为设计参数且是正定矩阵, σ>0为设计参数。
最后, 实际的控制量选取为

|
(20) |
根据上述自适应控制律的推导过程可知, 文中设计的控制律(20)和自适应律(18)仅利用了系统的输出及其导数信息, 无需观测器对系统的内部状态和干扰进行估计。相比与传统的自适应控制, 文中设计的基于连续特征模型的自适应控制律形式简单, 易于工程实现。
2.3 稳定性分析首先, 定义
|
(21) |
根据上式, 可将(12)式改写为

|
(22) |
将(20)式代入(16)式, 可得

|
(23) |
由(14)式和(21)式可得

|
(24) |
式中, η1为连续函数, 类似于线性定常系统[7], 对于线性时变系统, 同样存在η1使得
定义Lyapunov函数

|
(25) |
定理2 由连续特征模型(10)、控制律(20)、自适应律(18)和一阶滤波器(14)所构成的闭环系统, 如果假设1和2成立, 对于任意给定的正常数R1, 若
|
则存在c1, c2, τ2, Γ和σ使得闭环系统是一致有界, 且通过选取合适的设计参数可使系统输出y收敛到平衡点(原点)附近任意小的邻域内。
证明 联立(19)式、(22)式、(23)式和(24)式, 对(25)式求导可得

|
(26) |
将(19)式代入(26)式, 可得
|
(27) |
根据Young不等式, 可得
|
(28) |

|
(29) |
式中, ε为任意的正常数。利用上式, 可将(27)式改写为
|
(30) |
令

|
(31) |
则, (30)式可简写为
|
(32) |
定义紧集合

|
(33) |
式中, R1是正常数。在紧集合Ω1内, (24)式中的连续函数η1和(31)式所定义的函数φ存在最大值, 设其最大值分别为Mη和Mφ。
选取

|
(34) |
式中, α0>0是设计参数。将(34)式代入(32)式, 可得

|
(35) |
对于任意的常数R1≥V(0), 如果α0满足下述不等式
|
(36) |
则, 当V=R1时, 
由(35)式可得
|
(37) |
因此

|
(38) |
故, 通过增大参数α0的取值, 可以使系统输出y收敛到平衡点(原点)附近任意小的邻域内。
注4 (31)式所定义的函数φ与设计参数σ相关, 会改变Mφ的值。但是, 通过选取合适的正定矩阵Γ, 可以使Mφ的值保持不变。
3 数值仿真与分析目前大多数针对仿射非线性系统的自适应控制方法需要事先已知被控对象的模型, 仅对模型中的部分未知参数、不确定性或外界干扰进行估计, 并不能完全脱离原系统模型, 而且控制器的结构形式与被控对象模型密切相关。
为了体现文中基于连续特征模型的新型自适应控制方法的优越性, 在数值仿真中, 针对两种模型形式显著不同的被控对象, 采用相同的控制器进行控制, 以验证文中控制方法的性能。这样可以充分体现新型自适应控制方法完全不依赖被控对象模型, 仅利用被控对象的输出及其导数即可实现高精度控制的特点。
被控对象1为
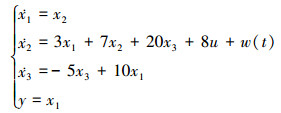
|
(39) |
被控对象2为
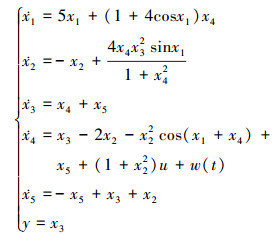
|
(40) |
式中, w(t)可表示模型不确定项或干扰项。
在仿真过程中, 除了被控对象1和2输出是可获取的, 其它的相关模型信息(包括模型阶数、参数、函数和内部状态等)均是未知的, 分别选取w(t)=0, 10sin(t+1), 并分析控制效果。此外, 将文中基于连续特征模型的新型自适应控制(CCMAC)与文献[4]中的基于离散特征模型的系统辨识控制(DCMIC)进行比对, DCMIC同样不依赖于被控对象模型, 但其采用二阶差分方程作为离散特征模型, 利用输入/输出信息进行系统参数辨识。
基于连续特征模型的新型自适应控制(CCMAC)器中设计参数选取如下:
|
基于离散特征模型的系统辨识控制(DCMIC)器如下:
系统参数辨识算法

|
式中, ψ(k)=[y(k) y(k-1) u(k)]T, 离散特征模型参数向量

控制律

|
被控对象1的初始状态为

|
被控对象2的初始状态为

|
在w(t)=0的情况下, 被控对象1和2的输出曲线见图 1。根据输出曲线可知, 本文所设计的新型自适应控制律可以使被控对象的输出在较短的时间内收敛到平衡点(零点)附近的邻域内, 而且超调量和稳态误差也都较小。但是, 基于离散特征模型的系统辨识控制方法的收敛速度慢、振荡幅值大, 约1.5 s之后才进入稳态误差范围内, 明显大于本文控制方法的0.25 s。

|
| 图 1 w(t)=0时被控对象的输出特性 |
在w(t)=10sin(t+1)的情况下, 被控对象1和2的输出曲线见图 2。根据输出曲线可知, 被控对象存在不确定项或干扰项时, 基于离散特征模型的系统辨识控制方法出现明显的约0.2的稳态误差, 而本文设计的控制律仍然具有较小的稳态误差和良好的动态性能。

|
| 图 2 w(t)=10sin(t+1)时被控对象的输出特性 |
对比图 1和图 2中的被控对象输出曲线可以看出, 即使在w(t)=10sin(t+1)时, 本文所提控制律使得闭环系统的动态特性和稳态误差几乎和w(t)=0时相同。
为了进一步验证本文所设计的控制器对外界干扰具有较强的鲁棒性, 采用相同的控制器, 并分别选取2种不同类型和3种不同幅值、频率的正弦波和方波作为被控对象1和2的外界干扰, 干扰的类型及参数见表 1。
| 序号 | 类型 | 幅值 | 频率 | 相位 |
| 1 | 10 | 1 | π/4 | |
| 2 | 正弦波 | 20 | 5 | π/4 |
| 3 | 40 | 10 | π/4 | |
| 4 | 10 | 1 | 0 | |
| 5 | 方波 | 20 | 5 | 0 |
| 6 | 40 | 10 | 0 |
在不同幅值和频率的正弦波干扰的作用下, 被控对象1和2的输出特性如图 3所示。

|
| 图 3 正弦波干扰下被控对象的输出特性 |
在不同幅值和频率的方波干扰的作用下, 被控对象1和2的输出特性分别如图 4所示。

|
| 图 4 方波干扰下被控对象的输出特性 |
由表 1可知, 文中选取正弦波和方波2种不同类型的外界干扰, 并且干扰的幅值变化范围[10,40]和频率变化范围[1 Hz, 10 Hz]较大。通过分析图 3和图 4中被控对象的输出特性曲线可知:当被控对象相同时, 在干扰1~6的作用下, 被控对象的输出特性基本相同, 收敛时间约为0.25 s, 稳态误差均小于0.05;当干扰相同时, 不同被控对象的输出特性也基本相同, 仅动态响应过程存在微小的不同。
因此, 本文所提的基于连续特征模型的新型自适应控制方法使闭环系统具有较强的鲁棒性, 主要体现在以下2个方面:①当被控对象和控制器相同时, 在不同类型、幅值和频率的干扰作用下, 被控对象的输出特性基本保持不变; ②将同一组控制器分别应用于2种模型结构存在显著差异的被控对象, 在多种外界干扰的作用下, 系统输出的动态响应过程和稳态误差基本相同。这表明文中研究的新型自适应控制方法可以有效地抵抗多种外界干扰, 同时也在被控对象的模型结构不确定方面具有较强的鲁棒性, 不依赖于系统模型, 控制效果主要由所选择的控制器参数决定。
从上述分析可知, 与传统的自适应控制方法相比, 本文提出的基于连续特征模型的新型自适应控制方法使得控制器设计不再依赖被控对象的动力学模型, 仅利用其输出及其导数即可取得良好的控制效果; 与基于离散特征模型的系统辨识控制方法相比, 文中控制律的误差收敛速度快、稳态误差和超调量小、鲁棒性强。
4 结论本文针对一类仿射非线性系统, 建立了具有输入-输出等效的二阶连续特征模型, 并结合动态面控制方法设计出一种基于连续特征模型的新型自适应控制方法。与传统控制系统设计所使用的降阶简化模型不同, 文中提出的二阶连续特征模型利用压缩函数将原系统的非线性项、不确定项和高阶项等信息压缩到相应的特征参数中, 在此过程中未省略原系统的任何信息, 因此二阶连续特征模型与原系统具有完全等效的输入-输出特性, 可以等效替代原系统进行输出反馈控制系统设计。由于二阶连续特征模型中的特征参数包含大量原系统的未知信息, 特征参数一般是未知的, 且具有大范围、快时变的特点, 所以采用具有较强鲁棒性的自适应动态面控制技术对二阶连续特征模型进行输出反馈控制。综上所述, 文中所提控制方法不再依赖被控对象的动力学模型, 仅利用其输出信息即可实现高精度的输出反馈控制, 而被控对象的内部状态量、函数表达式、参数和不确定项等信息均可未知。仿真结果验证了控制方法的有效性和鲁棒性。
| [1] | Huang H. Multiple Characteristic Model-Based Golden-Section Adaptive Control:Stability and Optimization[J]. International Journal of Adaptive Control and Signal Processing, 2015, 29: 877-904. DOI:10.1002/acs.v29.7 |
| [2] | Huang H, Zhang Z. Characteristic Model-Based H2/H∞ Robust Adaptive Control during the Re-Entry of Hypersonic Cruise Vehicles[J]. Science China Information Sciences, 2015, 58: 012202. |
| [3] | Chen L, Yan Y, Mu C X, et al. Characteristic Model-Based Discrete-Time Sliding Mode Control for Spacecraft with Variable Tilt of Flexible Structures[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 42-50. DOI:10.1109/JAS.2016.7373761 |
| [4] | Huang J F, Kang Y, Meng B, et al. Characteristic Model Based Adaptive Controller Design and Analysis for a Class of SISO Systems[J]. Science China Information Sciences, 2016, 59: 052202. DOI:10.1007/s11432-015-5310-1 |
| [5] | Limanond S, Tsakalis K S. Model Reference Adaptive and Nonadaptive Control of Linear Time-Varying Systems[J]. IEEE Trans on Automatic Control, 2000, 45: 1290-1300. DOI:10.1109/9.867022 |
| [6] | Zhu Y, Su H Y, Krstic M. Adaptive Backstepping Control of Uncertain Linear Systems under Unknown Actuator Delay[J]. Automatica, 2015, 54: 256-265. DOI:10.1016/j.automatica.2015.02.013 |
| [7] | Ma J J, Zheng Z Q, Li P. Adaptive Dynamic Surface Control of a Class of Nonlinear Systems with Unknown Direction Control Gains and Input Saturation[J]. IEEE Trans on Cybernetics, 2015, 45(4): 728-741. DOI:10.1109/TCYB.2014.2334695 |
| [8] | Wang C L, Lin Y. Adaptive Dynamic Surface Control for MIMO Nonlinear Time-Varying Systems with Prescribed Tracking Performance[J]. International Journal of Control, 2015, 88(4): 832-843. DOI:10.1080/00207179.2014.981860 |
| [9] | Zong Q, Wang F, Tian B L, et al. Robust Adaptive Dynamic Surface Control Design for a Flexible Air-Breathing Hypersonic Vehicle with Input Constraints and Uncertainty[J]. Nonlinear Dynamic, 2014, 78: 289-315. DOI:10.1007/s11071-014-1440-z |
| [10] | Song M C, Lin Y, Huang R. Robust Adaptive Dynamic Surface Control for Linear Time-Varying Systems[J]. International Journal of Adaptive Control and Signal Processing, 2014, 28: 932-948. DOI:10.1002/acs.v28.10 |
| [11] | Yan Z, Wang J. Robust Model Predictive Control of Nonlinear Systems with Unmodeled Dynamics and Bounded Uncertainties Based on Neural Networks[J]. IEEE Trans on Neural Networks and Learning Systems, 2014, 25(3): 457-469. DOI:10.1109/TNNLS.2013.2275948 |
| [12] | Aswani A, Gonzalez H, Sastry S S, et al. Provably Safe and Robust Learning-Based Model Predictive Control[J]. Automatica, 2013, 49: 1216-1226. DOI:10.1016/j.automatica.2013.02.003 |
