

2. 水下信息与控制重点实验室, 陕西 西安 710072
水下拦截器是一种用于拦截来袭鱼雷的新型主动防御型水下武器,由于来袭鱼雷体积小、速度快、机动性强,故而对拦截器的导引与控制系统提出了反应速度快、导引精度高的需求[1-2]。
传统导引与控制系统的设计忽略了两者之间的耦合性,将2个系统分开设计,容易引起脱靶量较大及响应滞后等问题[3]。与传统设计方法不同,导引与控制一体化(IGC, integrated guidance and control)是将导引与控制系统作为整体设计,根据水下拦截器和来袭鱼雷的相对运动关系以及拦截器的姿态信息产生舵偏指令,使得系统在稳定的前提下,提高命中率以及快速性。
在导弹等空间飞行器领域,关于IGC设计方法的研究已有很多成果:文献[4]针对导弹的俯仰通道建立了一体化模型,针对系统存在的有界不确定性干扰的情况,设计了自适应反演控制器。文献[5]在以视线角速率与视线角偏差组成的滑模面中引入剩余飞行时间,采用积分滑模与动态面控制的方法设计了一种鲁棒末制导律。文献[6]针对AUV的输入非线性,提出了一种基于干扰观测器的自适应动态抗饱和滑模姿态控制。文献[7]针对倾斜转弯飞行器设计了三维制导与控制一体化模型,考虑通道间的耦合因素,采用连续非光滑控制理论对三维系统设计非光滑扩张状态观测器对模型中的不确定因素进行观测补偿。文献[8]针对一体化系统具有的较高阶数以及系统存在的不确定性问题,研究了三维空间中能适应大范围不确定性的一体化方法,采用自抗扰控制技术设计了控制器。文献[9]建立纵向制导与控制一体化设计模型,结合加幂积分方法与嵌套饱和方法设计了新的制导控制一体化非线性控制律,考虑一体化系统存在的输入饱和现象,从全局角度为这类级联系统设计了抗饱和稳定控制方法。文献[10]针对三维空空导弹拦截问题,考虑模型非线性和干扰的不确定性,设计了基于线性滑模方法的空空导弹自适应一体化控制律。文献[11]研究了三维空间中的导弹一体化制导控制方法,选择垂直和水平面中的预测碰撞点航向误差作为滑模面,当航向误差为零时,导弹与预测碰撞点处于碰撞过程,从而命中目标。文献[12]采用非线性状态变化将导弹俯仰通道的一体化导引与控制系统模型转化为标准级联形式,设计了自适应滑模控制器。在水下航行器领域,关于IGC问题的研究尚未见到相关报道。
本文针对水下拦截器对制导系统的设计需求,研究水下拦截器在拦截高速机动目标时的导引与控制一体化问题,建立了水下拦截器侧向通道的导引控制一体化系统的数学模型,考虑目标机动引起的系统不确定性,采用自适应全局滑模控制方法设计了一体化制导控制律,并改进了滑模函数,从而减少了系统抖振,提高了系统的鲁棒性以及快速性。
1 导引控制一体化数学模型图 1为水平面内拦截器与目标的相对运动示意图,Oxz为地面坐标系, 拦截器与目标的相对运动方程如下所示:

|
(1) |

|
| 图 1 拦截器与目标的相对运动 |
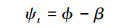
式中, R代表的是拦截器与目标的相对距离, vt, vm分别代表拦截器与目标的速度, q为视线角, ψt, ψm分别代表拦截器与来袭鱼雷的弹道偏角。
假设拦截器与目标在机动时只改变速度大小而不改变速度方向, 故而


|
(2) |
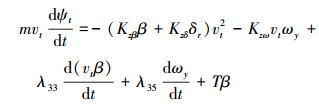
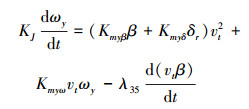
拦截器侧向通道的动力学方程模型为[3]:
|
(3) |
|
(4) |

|
(5) |
|
(6) |
式中, ϕ是偏航角, β为侧滑角, ωy是旋转角速度。
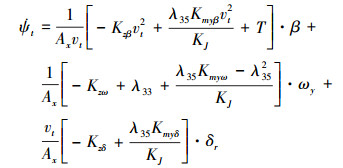
整理得:
|
(7) |

|
(8) |

|
(9) |
式中, 
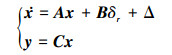
将(7)式代入(2)式, 近似认为cos(q-ψt)≈1, 令

|
(10) |
式中,状态变量


|
|
式中
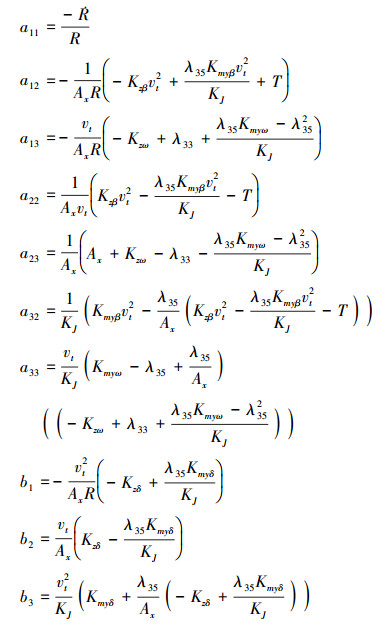
|
针对(10)式所示的水下拦截器导引与控制系统, 设计自适应全局滑模控制律, 使系统达到闭环渐近稳定, 系统状态趋于原点, 从而有
设计滑模切换函数为:

|
(11) |
式中,x1, x2, x3为系统的状态变量, 矩阵C=[c1, c2, c3]为滑模参数, F(t)为时变函数, F(t)=F(0)·e-kt, 其中k > 0的常数, F(0)=c1x1(0)+c2x2(0)+c3x3(0)。
由于水下条件复杂, 对目标信息的测量精度不高, 为了增强系统的鲁棒性, 在滑模函数中加入了时变函数F(t), 构建全局滑模结构。对(11)式求导可得:

|
(12) |
对(12)式两边积分可得:

|
将(12)式代入到对(12)式的积分变换中得:

|
因此, 一体化系统在初始时刻就处于滑动模态阶段, 从而提高了系统的全局鲁棒性[13-14]。
定理1[15] 若系统(10)可控, 则在矩阵C的零核空间S0=KerC上存在滑动模态的动态性能取决于参数矩阵C, 并且系统(10)在S0=KerC上存在滑动模态且任意点均能到达该滑动模态的充要条件为:

|
(13) |
式中,C为滑模函数的参数矩阵, 可由极点配置等方法计算得到。
2.2 一体化自适应全局滑模控制算法当系统在所设计的滑模面s(x, t)=0上运动时, 
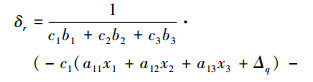
|
(14) |

|
由于目标机动引起的不确定性项Δq未知, 故(14)式无法直接应用。
假设1 拦截器导引与控制一体化系统(10)中的不确定项Δq是有界的, 但是该界未知, 即
|
(15) |
式中,M为未知的正数。
采用自适应调节律对M进行实时更新, 设该干扰的界M的估计值为M, 其自适应调节律为:
|
(16) |
式中,参数γ > 0。
故而自适应全局滑模控制律为δr:
|
(17) |
式中, ρ > 0为给定的常值。
2.3 稳定性分析定理2 当目标机动时, (10)式所示的水下拦截器导引控制一体化系统, 在假设1成立的时候, 采用(17)式所示的控制律以及(16)式所示的自适应律, 则整个闭环系统渐进稳定。
证明 选取Lyapunov函数为
|
(18) |
对(18)式关于t求导, 并将(10)式、(12)式、(16)式代入得:
|
将自适应全局滑模控制律, 即(17)式代入
|
综上所述, 闭环系统是渐进稳定的, 即状态轨迹渐进收敛于状态空间的原点, 视线角变化率
由于滑模控制存在抖动现象, 对系统造成以下两点影响:1)影响鱼雷的命中精度以及控制系统的稳定性; 2)会在系统平衡点附近产生较大的抖振, 影响到系统的性能。本文采用高增益的连续化方法来抑制抖振。
将(17)式中的不连续部分函数(ρ+M)sgn(s)使用光滑的连续的函数
|
(19) |
由于(19)式中的ε是大于零的常数, 不影响系统的稳定性分析, 即系统的稳定性不发生改变。
3 仿真实验将某水下拦截器的参数代入一体化系统(10)中可得:
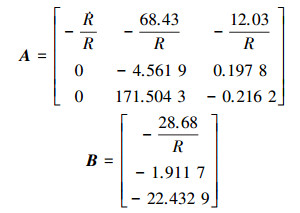
|
结构框图如图 2所示。

|
| 图 2 系统结构框图 |
针对图 3所示2种态势, 仿真实验对比自适应滑模控制律算法与改进后的算法, 初始仿真条件设置如下:

|
| 图 3 拦截器与目标的迎击态势 |
1) 来袭目标:初始位置坐标(1 000, 1 000), 初始航向角为215°, 速度18 m/s;
2) 水下拦截器:初始位置为(0, 0), 速度15 m/s初始侧滑角β=5°, 初始旋转角速度ωy=5°, 舵角限幅为δr=±12°, 针对图 2所示的态势A设置初始航向角为ψt=5°, 态势B设置初始航向角为ψt=50°;
3) 自适应全局滑模一体化控制器参数为:k=20, c1=12, c2=1, c3=1, γ=0.01ε=0.005, ρ=0.01;
4) 目标机动时的旋转角速度设置为:ωm=0.5*sin(0.1*t+1)。
态势A下的拦截器与目标的相对运动轨迹如图 4所示, 图中的“*”表示拦截器与目标的相遇点, 拦截器各参数变化如图 5所示, 同样, 态势B下的仿真结果如图 6和图 7所示。根据图 4、图 6可知, 改进后的自适应全局滑模控制律的弹道相对于改进前的弹道更平直、系统的快速性更好。图 5和图 7表明, 算法改进前拦截器命中目标时末端出现较大的抖动, 舵角输入存在明显的抖动现象, 而算法改进后各参数几乎没有末端抖动, 表明改进后的算法有效削弱了滑模面的末端抖动, 而且明显抑制了舵角的抖动, 使得各个参数的状态响应曲线趋于平滑。

|
| 图 4 拦截器与目标的相对运动轨迹图(态势A) |

|
| 图 5 拦截器的状态参数变化图(态势A) |

|
| 图 6 拦截器与目标的相对运动轨迹图(态势B) |

|
| 图 7 拦截器的状态参数变化图(态势B) |
将本文所设计的一体化自适应全局滑模控制方法与传统双回路比例导引法分别在态势A、态势B条件下进行对比, 表 1对比了2种方法在态势A和B下的脱靶量和命中时间, 相对运动轨迹如图 8、图 9所示。
| 不同态势 | 脱靶量 | 命中时间 | ||
| 一体化 | 比例 | 一体化 | 比例 | |
| A | 0.169 | 0.385 | 44.32 | 44.42 |
| B | 0.367 | 0.399 | 45.28 | 45.39 |

|
| 图 8 拦截器与目标的相对运动轨迹图(态势A) |

|
| 图 9 拦截器与目标的相对运动轨迹图(态势B) |
仿真结果表明, 在态势A以及态势B所示的迎击情况, 基于自适应的全局滑模控制一体化设计方法的脱靶量相较于比例导引法的脱靶量小, 且命中时间小, 表明一体化设计方法可以取得较好的制导精度, 且系统响应更快。
4 结论本文主要研究了水下拦截器的制导控制一体化设计问题, 建立了水下拦截器侧向通道的导引控制一体化系统的数学模型, 针对目标机动带来的不确定性问题, 在假设该不确定性项有界的条件下, 设计了自适应全局滑模控制一体化制导控制律, 采用Lyapunov稳定性理论证明了一体化系统的稳定性, 进一步改进了算法以减少滑模面的抖振, 并将所设计的一体化方法与传统的双回路比例导引方法进行仿真对比, 结果表明一体化算法的精确性和快速性更优。
然而, 本文提出的水下拦截器导引控制一体化滑模控制算法仍有以下问题还需进一步解决:
1) 所提出的控制算法是全状态反馈, 需要β和ωy的值, 工程实际系统中, β值难以直接测量。针对此问题, 解决的办法有2种:①设计观测器估算得到β值; ②研究输出反馈方法。
2) 实际系统中舵角均有限幅, 本文仅在仿真实验中设置了舵角限幅, 下一步将考虑设计一个控制器对舵角输入的非线性因素进行补偿。
| [1] |
王新华, 杨迎化, 衡辉, 等. 水下拦截器发展现状及作战使用[J]. 飞航导弹, 2012(5): 54-58.
Wang Xinhua, Yang yinghua, Heng Hui, et al. Underwater Interceptor Development Status and Combat Use[J]. Air Missile, 2012(5): 54-58. (in Chinese) |
| [2] |
陈敬军. 国外反舰鱼雷的现状与发展趋势[J]. 声学技术, 2013, 32(2): 164-170.
Chen Jingjun. Foreign and Anti-Ship Torpedo Status and Development Trend[J]. Acoustics, 2013, 32(2): 164-170. (in Chinese) |
| [3] |
徐德民. 鱼雷自动控制系统[M]. 西安: 西北工业大学出版社, 2001.
Xu Demin. Torpedo Automatic Control System[M]. Xi'an: Northwestern Polytechnical University Press, 2001. (in Chinese) |
| [4] |
周觐, 雷虎民, 李炯. 导弹俯仰通道制导控制一体化设计[J]. 现代防御技术, 2014, 42(5): 80-84.
Zhou Jian, Lei Humin, Li Jiong. Integrated and Design of Missile Pitch Guidance Control[J]. Modern Defense Technology, 2014, 42(5): 80-84. (in Chinese) |
| [5] |
杨靖, 王旭刚, 王中原. 考虑自动驾驶仪动态特性和攻击角约束的鲁棒末制导律[J]. 兵工学报, 2017, 38(5): 900-909.
Yang Jing, Wang Xugang, Wang Zhongyuan. Robust End-Guidance Law Considering the Dynamic Characteristics and Attack Angle Constraints of Autopilot[J]. Journal of Ordnance, 2017, 38(5): 900-909. (in Chinese) |
| [6] | Cui R, Zhang X, Cui D. Adaptive Sliding-Mode Attitude Control for Autonomous Underwater Vehicles with Input Nonlinearities[J]. Ocean Engineering, 2016, 123: 45-54. DOI:10.1016/j.oceaneng.2016.06.041 |
| [7] |
孙向宇, 晁涛, 王松艳. 考虑通道耦合因素的制导控制一体化设计方法[J]. 宇航学报, 2016, 37(8): 936-945.
Sun Xiangyu, Chao Tao, Wang Songyan. Integrated Design Method of Guidance Control Based on Channel Coupling Factors[J]. Journal of Astronautics, 2016, 37(8): 936-945. (in Chinese) |
| [8] |
薛文超, 黄朝东, 黄一. 飞行制导控制一体化设计方法综述[J]. 控制理论与应用, 2013, 30(12): 1511-1520.
Xue Wenchao, Huang Chaodong, Huang Yi. A Summary of Integrated Design Method for Flight Guidance Control[J]. Control Theory and Applications, 2013, 30(12): 1511-1520. (in Chinese) |
| [9] |
王松艳, 孙向宇, 杨胜江. 考虑输入饱和的制导控制一体化设计[J]. 航空学报, 2017, 38(10): 182-192.
Wang Songyan, Sun Xiangyu, Yang Shengjiang. On the Integration Design of Guidance Control Considering Input Saturation[J]. Acta Aerospace Sinica, 2017, 38(10): 182-192. (in Chinese) |
| [10] |
朱战霞, 陈鹏, 唐必伟. 基于滑模方法的空空导弹一体化制导控制律设计[J]. 西北工业大学学报, 2014, 32(2): 213-219.
Zhu Zhanxia, Chen Peng, Tang Biwei. Designing Integrated Guidance and Control Law for Air to Air Missile Based on Sliding Mode Control[J]. Journal of Northwestern Polytechnical University, 2014, 32(2): 213-219. (in Chinese) |
| [11] | Nathan Harl, Sivasubramanya Balakrishnan, Craig Phillips. Sliding Mode Integrated Missile Guidance and Control[C]//AIAA Guidance, Navigation, and Control Conference, 2010: 7741 |
| [12] |
段广仁, 侯明哲, 谭峰. 基于滑模方法的自适应一体化导引与控制律设计[J]. 兵工学报, 2010, 31(2): 191-198.
Duan Guangren, Hou Mingzhe, Tan Feng. Adaptive Integrated of Guidance and Control Law Design Using Sliding-Mode Approach[J]. Acta Armamentarii, 2010, 31(2): 191-198. (in Chinese) |
| [13] |
张丰. 滑模变结构控制理论在非线性系统中的应用[D]. 沈阳: 沈阳理工大学, 2013 Zhang Feng. Sliding Mode Variable Structure Control Theory in the Application of Nonlinear System[D]. Shenyang, Shenyang University of Technology, 2013(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10144-1013226273.htm |
| [14] |
臧亚坤. 改进全局滑模控制及应用研究[D]. 天津: 天津工业大学, 2017 Zang Yakun. Improved Global Sliding Mode Control and its Application[D]. Tianjin, Tianjin Polytechnic University, 2017(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10058-1017198078.htm |
| [15] |
高炜炳. 变结构控制理论基础[M]. 北京: 中国科学技术出版社, 1990.
Gao Weibing. Theory of Variable Structure Control[M]. Beijing: China Science and Technology Press, 1990. (in Chinese) |
2. National Key Laboratory of Underwater Information Processing and Control, Xi'an 710072, China
