

2. 中国科学院大学, 北京 100049;
3. 深圳供电局有限公司, 广东 深圳 518048
巡检机器人是实现输电线巡检作业自动化的重要途径之一, 可代替线路工人完成繁重的巡检任务, 具有巡检费用低、安全可靠、易于操作以及可近距离精细巡检等优点。对于原始森林、山区等环境恶劣路段, 机器人巡检还能保证巡检到位率, 缩短巡检周期。机器人机构设计是巡检机器人研究的一项关键技术, 其行走越障机构是巡检作业工具的载体, 为机器人快速可靠地进行巡检作业提供保障。当输电线路经过高山、河流、峡谷、森林等地段时, 输电线路普遍存在档距跨度大、线路坡度陡且金具形式多样的情况, 线路巡检的实际需求要求机器人同时具有较强的越障能力和滚动爬坡能力。
近年来, 国内外多家研究机构对输电线巡检机器人展开了研究, 代表性研究成果是日本HiBOT公司研制的巡检机器人系统Expliner[1]、加拿大魁北克电力研究院研制的多功能巡检作业平台LineScout[2-3]、湖南大学开发的输电线除冰机器人[4]、武汉大学研制的高压巡检机器人[5]以及中国科学院沈阳自动化研究所研制的输电线巡检维护机器人[6-8]。文献[1]提出了一种在双线结构上行走的机器人Expliner, 该机器人通过改变自身的二自由度操作臂的重心位置来调整在输电线上的姿态, 从而完成越障动作, 可跨越的障碍物包括防振锤、间隔棒等可通过型障碍, 不能跨越悬垂线夹, 最大滚动爬坡角度为30°。文献[3]研发了一种输电线路综合作业机器人平台LineScout, 机器人所携带的作业工具包括压接管、电阻检测器、紧固扳手、压接钳和观测云台, 机器人总长1 370 mm, 总重100 kg, 可跨越悬垂线夹, 最大滚动爬坡角度为30°。文献[4]设计了3种不同的除冰机器人机构, 其中三臂除冰机器人综合性能最佳, 可跨越悬垂线夹, 最大滚动爬坡角度不超过30°。文献[5]针对线路金具结构复杂难以越过的问题, 提出了一种线路金具改造方案和一种自主巡检作业系统, 可大幅度降低机器人的越障难度, 但是经济成本巨大。文献[6]基于输电线断股问题, 研制了一种断股补修机器人, 通过增加夹持装置使得机器人可在线路上稳定行走, 但是该机器人不具备跨越线夹的能力, 最大滚动爬坡角度不超过26°。由此可见, 上述巡检机器人研究没有考虑到大跨度输电线路巡检的实际需求, 使得机器人不能同时具有较强的越障能力和滚动爬坡能力。
本文综合考虑直线塔段大跨度输电线路巡检需求, 从人爬树运动研究中得到启示, 完成了一种新型四臂巡检机器人的机构设计。针对该新型四臂巡检机器人的特点, 采用运动学仿真实验的方法对机构设计可行性、机器人爬坡和越障性能进行了分析和验证。
1 任务需求与环境描述根据超高压输电线路的巡检任务需求, 巡检机器人需要在架空地线上行走, 跨越线路障碍, 携带、操作红外热成像仪和可见光摄像机分别对线路结构及其通道进行观测检查, 如线路的受损情况、发热情况、压接管的工作状况、线路通道情况、线路绝缘情况等, 采用微波通讯方式将观测图像实时传输至地面控制基站。
直线塔段大跨度超高压输电线路环境如图 1所示, 主要由直线塔、架空导线、地线、防振锤、压接管、悬垂线夹、绝缘子串等组成。机器人沿架空地线巡检作业时, 需要跨越的障碍物为压接管、防振锤和悬垂线夹。输电线档距跨度大导致悬垂线夹处线路倾斜角度大, 最大角度可达40°。由于铁塔、线路等设施在安装过程中产生的偏差, 悬垂线夹两侧线路还存在一定转角。为实现直线塔段线路巡检的目标, 机器人必须同时具备攀爬倾斜线路和跨越直线塔处障碍物的能力。

|
| 图 1 大跨度单挂点线路环境 |
自然界生物经过千百万年的进化, 其机体结构特征极具合理性, 如能在机器人的设计中充分模仿和借鉴并加以适当调整改进, 将实现高效灵活的运动。通常人在爬树时双手双脚分别环抱夹紧树干, 配合腰部的伸缩, 便可沿弯曲的树干爬行, 如图 2a)所示。

|
| 图 2 爬树过程示意图 |
当遭遇突出树杈障碍时, 根据树杈长短情况, 通过调整双手和双腿姿态, 人体可使四肢依次分别从树杈上方或者侧边越过障碍, 其典型越障姿态如图 2b)、图 2c)所示。
从人爬树运动过程, 可以发现, 人爬树成功实现攀爬和越障的特征:①在攀爬过程中, 必然有一对肢体夹持树干, 为攀爬运动提供支撑基础; ②在越障过程中, 单个肢体可以灵活调整姿态, 跨越树干或者远离树干; ③在弯曲的树干上运动时, 腰部必然有一定的弯曲度。因此, 从人爬树运动研究中得到启示, 设计一种四臂式巡检机器人机构, 来实现巡检机器人在大跨度输电线路上的作业任务。
2.2 整体机构设计新型四臂巡检机器人结构简图如图 3a)所示, 每条驱动手臂设计了1个回转关节, 每条伸缩手臂设计了1个移动关节和1个回转关节, 4条手臂反对称布置在前后箱体上, 在2个箱体之间引入了1个被动铰接盘。机器人在爬坡过程中, 移动关节通过夹紧轮与线路接触, 用于改变机器人受力状态, 提高机器人的爬坡性能。机器人在越障过程中, 移动关节用于调节机器人在线上的姿态, 确定行走轮的位置; 回转关节用于调节行走轮的姿态, 绕开障碍物; 被动铰接盘用于改变前后箱体的相对位姿, 以适应悬垂线夹两侧线路存在转角的情况。

|
| 图 3 机器人机构及实体模型 注:1.行走轮; 2.回转关节; 3.夹紧轮; 4.被动关节; 5.被动行走轮; 6.回转关节; 7.移动关节; 8.被动回转关节; 9.箱体 |
根据以上确定的机器人结构, 建立巡检机器人的实体模型如图 3b)所示。
2.3 结构参数设计将机器人的4个手臂分别表示为F, B, D和T, 每条伸缩手臂(F, B)具有3个自由度, 分别为夹紧轮被动关节回转、关节回转θ4(θ9)和关节移动d3(d8); 每条驱动手臂(D, T)具有1个自由度, 为关节回转θ2(θ12); 2个箱体之间的铰接盘具有1个自由度, 为被动关节回转θ7。机器人运动参数及结构参数如图 4所示, 图中l1, l2分别为手臂B与手臂T、手臂F之间的间距, h1, h2, h3, h4, h5分别为手臂各段长度, R, r分别表示驱动手臂和伸缩手臂行走轮半径, 行走轮形心与驱动手臂的距离为b1, 行走轮形心与伸缩手臂的距离为b3。

|
| 图 4 机人机构参数 |
考虑图 1所示超高压线路上障碍物的尺寸以及机器人的越障方式, 初步确定机器人具体结构参数及运动参数如表 1所示。
| 机器人参数 | 数值 |
| l1/mm | 270 |
| l2/mm | 204 |
| h1/mm | 454 |
| h2/mm | 90 |
| h3/mm | 109 |
| h4/mm | 302 |
| h5/mm | 129 |
| b1/mm | 117 |
| b3/mm | 223 |
| θ2/(°) | -180~+180 |
| d3/mm | 0~356 |
| θ4/(°) | -180~+180 |
| θ7/(°) | -30~+30 |
| d8/mm | 0~356 |
| θ9/(°) | -180~+180 |
| θ12/(°) | -180~+180 |
由上述环境描述可知, 攀爬大角度倾斜线路和跨越单挂点悬垂线夹是机器人必须克服的难点, 下面对机器人攀爬倾斜线路和跨越悬垂线夹的运动过程进行分析。
3.1 运动学分析在机器人爬坡和越障过程中, 机器人总有1条驱动手臂悬挂在线路上, 因此, 以手臂T行走轮轴心为基础坐标系原点, 建立机器人各关节坐标系如图 5所示, 各关节坐标系之间的相对变换矩阵可以表示为

|
| 图 5 机器人的连杆坐标系 |
|
(1) |
式中, jiR和iPjo分别表示坐标系j相对于坐标系i的旋转变换和平移变换。
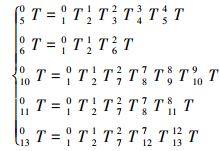
于是机器人各个末端的位姿可以表示为
|
(2) |
通过2个行走轮附着在线路上, 机器人可沿输电线路快速行走。由于1个驱动行走轮所能提供的牵引力有限, 机器人一般都是通过双轮驱动的方式作业。输电线路可近似看作悬链线, 其曲率半径远远大于机器人两臂间距, 因此可以认为两臂之间的架空地线为直线。为了尽可能降低爬坡能量损耗, 针对不同的线路倾斜角度, 在双轮驱动条件下, 机器人主要有3种运动模式, 分别为双臂悬空模式(见图 6a))、单臂夹紧模式(见图 6b))和双臂夹紧模式(见图 6c))。经过对比发现, 双臂悬空模式和单臂夹紧模式均可以从双臂夹紧运动模式简化得到, 因此, 下面仅对机器人双臂夹紧运动模式进行受力分析。

|
| 图 6 机器人爬坡运动模式 |
将伸缩手臂D, T分别简化为质点, 建立机器人爬坡受力模型如图 7所示, 图中Mdf, Mdr分别表示前后行走轮的驱动力矩, Mf, Mr分别表示前后行走轮的滚动摩阻力偶, Ff, Fr, Nf, Nr分别表示前后行走轮所受的摩擦力与正压力, ff, fr分别表示前后夹紧轮所受的牵引力, m为机器人总质量, lc为机器人质心与线路的垂直距离。

|
| 图 7 机器人攀爬倾斜线路的受力分析图 |
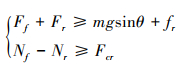
由于机器人沿线巡检时, 其运动速度较慢, 可将运动速度引起的阻尼力略去不计, 则机器人匀速爬坡运动力学模型为

|
(3) |
式中,δ为前后行走轮的滚动摩阻因数, μ1, μ2分别为行走轮和夹紧轮的滚动摩擦因数。
以后行走轮与线路接触点为中心, 建立力矩平衡方程, 则有
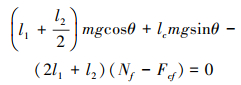
|
(4) |
当机器人处于双臂悬空运动模式时, 压紧轮与线路不发生接触, 则Fcf=0, Fcr=0, ff=0, fr=0, 代入(3)式、(4)式可得
|
(5) |
式中,M为行走轮电机的理论驱动力矩之和。
当机器人处于单臂夹紧运动模式时, 手臂F压紧轮与线路不发生接触, 则Fcf=0, Fcr=0。此时, 为保证机器人顺利爬坡, 同时使得前后行走轮的电机驱动力矩逐渐趋于一致, 手臂B压紧力需要满足的约束条件为
|
(6) |
将(6)式代入(3)式、(4)式可得
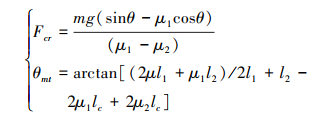
|
(7) |
式中,θmt为机器人在单臂夹紧运动模式下的最大爬坡角度。
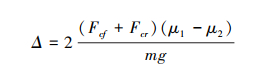
当机器人处于双臂夹紧运动模式时, 为保证机器人顺利爬坡, 同时使得前后行走轮的电机驱动力矩基本保持一致, 手臂B、手臂F压紧力需要满足的约束条件为
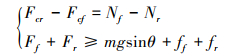
|
(8) |
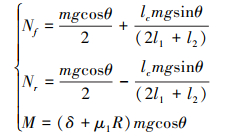
将(8)式代入(3)式、(4)式、(7)式, 手臂B、手臂F施加的压紧力分别为
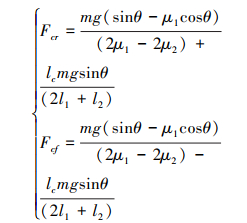
|
(9) |
机器人的最大爬坡角度可表示为
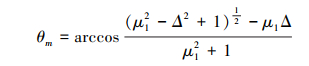
|
(10) |
式中:
|
从(10)式可知, 当机器人结构参数确定后, 机器人的最大爬坡角度可根据夹紧轮夹紧力来确定。
3.3 跨越悬垂线夹作为受限通过型障碍, 单挂点悬垂线夹的结构特征造成了机器人越障的困难。当机器人运动到悬垂线夹处时, 机器人采用绕开的方式使得各手臂依次跨越障碍, 其具体运动流程如图 8所示。

|
| 图 8 机器人跨越悬垂线夹流程图 |
从越障运动流程可知, 机器人跨越悬垂线夹的关键在于手臂D、手臂F能够顺利挂线, 因此, 机器人手臂末端的运动轨迹需要进行规划。在越障过程中, 机器人采用单臂夹紧单轮或双轮驱动的方式进行行走爬坡, 手臂压紧力需要满足的条件是保证行走轮与线路之间具有足够的附着力, 使得机器人行走不打滑。
4 仿真实验为研究机器人的爬坡与越障运动性能并验证机构设计的可行性, 对机器人进行爬坡与越障运动仿真实验。
4.1 爬坡仿真分析根据机器人爬坡运动模式, 将虚拟样机导入ADAMS中进行沿线爬坡仿真, 机器人虚拟样机质量为38 kg, 行走轮结构采用梯形结构。通过改变模拟线路的角度以及调整夹紧轮对线路夹紧力的方法来验证机器人在线路不同角度时的行走爬坡情况。
从仿真结果可以看出, 当机器人处于双臂悬空运动模式时, 行走轮电机驱动力矩随着线路倾角的增大逐渐增大, 由于前后行走轮负载不同, 前后行走轮电机驱动力矩存在很不均匀的情况。当行走轮与线路之间的牵引附着力达到最大值时, 前后行走轮开始打滑, 机器人最大爬坡角度为14.5°。当机器人处于单臂夹紧运动模式时, 机器人最大爬坡角度可提升至17.6°, 前后行走轮电机驱动力矩逐渐趋于一致。当机器人处于双臂夹紧运动模式时, 前后行走轮电机驱动力矩基本保持一致, 当机器人最大爬坡角度提升至40°时, 手臂B、手臂F压紧力分别414.8 N, 317.3 N, 单个压紧轮施加的压紧力分别为207.4 N, 158.7 N。

|
| 图 9 爬坡角度与驱动力矩变化曲线 |
考虑到悬垂线夹处越障空间狭小和越障安全稳定的要求, 机器人应尽量避免过多关节的联动。根据障碍物和环境的特点, 结合机器人越障运动流程, 本文采用Step函数规划各关节速度, Step函数为
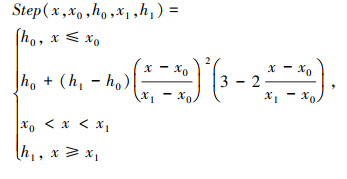
|
(11) |
仿真由机器人沿线行走爬坡并检测到悬垂线夹时开始, 由手臂F成功挂线后结束, 在运动过程中机器人各关节运动速度和手臂D, F, B末端位移如图 10所示。

|
| 图 10 越障运动曲线 |
由以上仿真分析可知, 机器人可以跨越直线塔单挂点悬垂线夹处的障碍物, 并顺利沿线行走完成巡检作业任务。
5 结论从仿生机器人机构设计原理出发, 综合考虑了机器人巡检任务需求和大跨度输电线环境特征, 提出了一种新型四臂巡检机器人。与现有巡检机器人相比, 该机器人结构新颖, 同时具备较强的爬坡能力和越障能力。通过对其爬坡运动、越障运动进行分析和仿真实验研究, 验证了新型四臂巡检机器人结构设计的可行性, 为样机的研制奠定了基础。
| [1] | Paulo D, Michele G. Expliner-From Prototype Towards a Practical Robot for Inspection of High-Voltage Lines[C]//Applied Robotics for the Power Industry, 2010: 1-6 http://www.researchgate.net/publication/224190298_Expliner__From_prototype_towards_a_practical_robot_for_inspection_of_high-voltage_lines |
| [2] | Serge M, Nicolas P. Hydro-Québec's Power Line Robotics Program: 15 Years of Development, Implementation and Partnerships[C]//Applied Robotics for the Power Industry, 2014: 1-6 http://www.researchgate.net/publication/282882566_Hydro-Qubec's_power_line_robotics_program_15_years_of_development_implementation_and_partnerships |
| [3] | Nicolas P, Pierreluc R, Serge M. Line Scout Technology Opens the Way to Robotic Inspection and Maintenance of High-Voltage Power Lines[J]. IEEE Power and Energy Technology Systems Journal, 2015, 2(1): 1-11. DOI:10.1109/JPETS.2015.2395388 |
| [4] |
王耀南, 魏书宁, 印峰, 等. 输电线路除冰机器人关键技术综述[J]. 机械工程学报, 2011, 47(23): 30-38.
Wang Yaonan, Wei Shuning, Yin Feng, et al. Review on Key Technology of Deicing Robot Running on Overhead Transmission Line[J]. Chinese Journal of Mechanical Engineering, 2011, 47(23): 30-38. (in Chinese) |
| [5] |
徐显金, 李维峰, 吴功平, 等. 沿架空地线行驶的自主巡检机器人及应用[J]. 武汉大学学报:工学版, 2010, 43(6): 752-756.
Xu Xianjin, Li Weifeng, Wu Gongping, et al. An Autonomous Inspection Robot for Transmission Line along Overhead Ground Line and its Application[J]. Engineering Journal of Wuhan University, 2010, 43(6): 752-756. (in Chinese) |
| [6] | Song Yifeng, Wang Hongguang. A Vision-Based Broken Strand Detection Method for a Power-Line Maintenance Robot[J]. IEEE Trans on Power Delivery, 2014, 29(5): 2154-2161. DOI:10.1109/TPWRD.2014.2328572 |
| [7] |
宋屹峰, 王洪光, 李贞辉, 等. 基于视觉方法的输电线断股检测与机器人行为规划[J]. 机器人, 2015, 37(2): 204-211.
Song Yifeng, Wang Hongguang, Li Zhenhui, et al. Vision Based Transmission Line Broken Strand Detection and Robot Behaviour Planning[J]. Robot, 2015, 37(2): 204-211. (in Chinese) |
| [8] |
李贞辉, 王洪光, 王越超, 等. 输电线巡检机器人自主抓线的控制[J]. 吉林大学学报, 2015, 45(5): 1519-1526.
Li Zhenhui, Wang Hongguang, Wang Yuechao, et al. Line-Grasping Control for a Power Transmission Line Inspection Robot[J]. Journal of Jilin University, 2015, 45(5): 1519-1526. (in Chinese) |
2. University of Chinese Academy of Sciences, Beijing 100049, China;
3. Shenzhen Power Supply Bureau Co., Ltd. Shenzhen 518048, China
