

2. 西安电子科技大学 机电工程学院, 陕西 西安 710071;
3. 空军工程大学 装备管理与安全工程学院, 陕西 西安 710051
自从无人机(unmanned aerial vehicle,UAV)在1991年海湾战争中得到成功运用以来,经过几十年的发展,无人机技术已相对成熟,并在各个领域中发挥了其独特的作用[1]。单架无人机在作战范围、杀伤半径、摧毁能力以及攻击精度等方面受到了限制,影响整个作战任务的成功率;另外,一旦单架无人机中途出现故障,必须立即中断任务返回,但在战争中有可能贻误无人机而破坏整个作战计划。因此,多无人机协同编队能最大限度发挥单机优势,实现多无人机协同编队飞行(multi-UAV coordinated formation flight)控制、决策和管理,从而提高无人机完成任务的效率,拓宽无人机使用范围,达到安全、高可靠性地执行各种任务的目的[2]。
多无人机协同编队在理论研究和工程应用上具有重要的意义,并已取得了不少研究成果。目前,无人机协同编队问题的研究已引起国内外学者的广泛关注[3-6]。无人机可看作是一种空中机器人,不考虑其实际的飞行动力学特性,可将其抽象为一种具有自主能力的智能体[7]。此时无人机协同稳定性控制就转化为多智能体系统的稳定控制。目前,有关多智能体系统的研究主要集中在一致性问题[8-12]、群集问题[13-14]和编队问题[15-16]。对于多智能体系统的编队控制来说,其稳定性是指多智能体系统的运动同步[17]。文献[18]研究了具有非线性和随机切换拓扑智能体网络的分布式同步问题,多智能单元的多无人机协同作战集中式结构。协同编队控制中,队形保持是一个主要问题。为实现无人机群以预期的姿态,恒定的间距飞行,需要控制每架无人机速度,航向角等飞行信息,使其达到一致性目的。2012年,祁圣君等人提出一种无人机近距编队飞行控制方法,并以双机近距离编队为基础对控制率设计和算法实现研究[19]。2015年,美国"全球鹰"实现了两无人机近距编队飞行,“空中软式加油”对接,是一个典型的近距协同编队飞行过程。大中型固定翼无人机协同编队高速飞行过程中,集群中单机出现故障,需要重新近距或超近距编队飞行,已经成为研究的热点。故本文提出解决在多无人机高速编队飞行中近距协同控制的问题。
本文针对无人机编队在执行作战任务时,机群中单机出现故障,需退出编队飞行(如无人机目标被击中、单机故障不适宜继续在编队中,队形被破坏需重新组队编队),即系统协同稳定性被打破,不能完成作战任务,提出了一种无人机编队协同飞行控制器的应急故障容错设计方法,提高飞行协同编队的稳定性,能够及时调整编队中无人机的重新编排和信息分配,达到多无人机协同编队飞行的目的。
1 任务描述假设 在执行一次作战任务中,由n(n>1)架无人组成的编队分别从不同的机场起飞,前往指定区域执行作战任务。在任务执行之前,需要考虑敌方的综合实力,如防空系统,对地攻击系统,拦截战术弹道和巡航导弹的能力,禁飞区以及无人机自身约束性能等,这些是我方作为出动兵力进行精确打击的参考。为了提升打击行动的成功率,我方无人机编队势必要求相互配合,相互协同,而且集群间通过数据链共享信息,进行统一决策,协同分工,保持“长机-僚机”之间的距离,尽可能按比例缩减无人机之间的相对位置和速度。这对无人机在复杂战场环境中安全高效、快速准确执行作战任务是至关重要的。
对于垂直打击任务中,协同编队控制是必然且极其重要的一个环节。进行无人机协同编队控制器设计,首先携带雷达的预警机(即“长机”)对无人机群进行信息感知,并对信息进行融合,其次在执行任务过程中,其中一架无人机故障,无人机编队重新编排,预警机将已感知信息进行融合处理,(重新)分配,快速决策,使每架无人机生成期望的航迹进行重新规划,然后利用所研究的协同控制理论和队形设计方法实现协同飞行。本文设计过程中,认为“长机-僚机”之间的通讯顺畅,以及僚机之间信息传递可达到实时性。最后通过搭建无人机协同虚拟仿真平台,验证所提出的控制方法在稳定飞行中的可行性。图 1为无人机协同编队飞行控制的流程图。

|
| 图 1 多无人机协同编队飞行结构图 |
该无人机长约5 m,翼展宽约2 m,起飞重量约30 kg,包括航电系统设备,PC-104飞行计算机,传感器,定位接收器,数据交换器等。该无人机使用涡轮发动机,提供最大起飞重量250 N,巡航速度大约为42 m/s,大迎角失速临界值为30 m/s,最大燃油量为10 L,最大巡航时间为20 min。按“长机-僚机”编队飞行[20]。无人机协同编队几何模型如图 2所示:

|
| 图 2 无人机协同编队几何模型 |
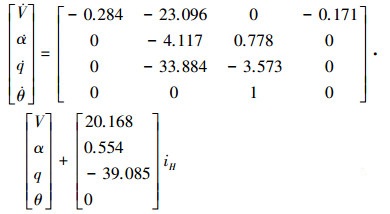
具有推力矢量的连续性数学模型参数,通过系统辨识技术进行参数估计。在气动模型参数识别研究中,该无人机纵向连续数学模型如(1)式和(2)式所示:
|
(1) |

|
(2) |
式中,iH表示失速角; V表示无人机相对于空气的速度; α, q和θ分别表示无人机的迎角, 俯仰角速度以及俯仰角; δA和δB为舵偏角。
该数学模型描述无人机编队纵向机动以恒定速度Vo=42 m/s飞行, 飞行高度为500 m, αo≈3°。这种模型为单机模型, 是建立在无人机非线性模型简化后(小扰动假设后的线性化后)的模型。
2.2 无人机非线性模型无人机非线性动态系统模型的控制理论设计分析是比较困难的, 大多数非线性系统模型参数采用最小二程法估计。无人机非线性模型如下[21-23]:

|
(3) |
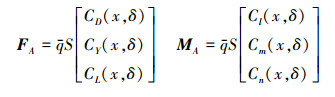
式中,x为无人机状态矢量, y和δ均为输出矢量, G为惯性坐标系下的几何参数矢量, f和y为刚体坐标系下的函数模型。气动力FA和气动力矩MA通常用气动参数表示:CD为阻力系数、CY为侧向力系数、CL为升力系数、Cl为滚转力矩系数、Cm为俯仰力矩系数、Cn为偏航力矩系数。
|
编队飞行控制包括两方面的问题:纵向和横向控制器设计, 本文针对纵向控制器设计。在惯性坐标系下“长机-僚机”的相对位置如图 3所示:

|
| 图 3 “长机-僚机”编队飞行位置几何模型 |
内环控制设计是为了尽可能的增大反馈增益实现预期的航迹, 同时保持较合理的航姿, 它基于(1)式和(2)式。纵向内环控制器是对期望的滚转角来设计的, 它被扩展到外环控制器, 有以下关系:

|
(4) |
这些参数通过根轨迹的方法辨识。Kq=0.12, Kθ=0.50, 允许闭环系统的阻尼比ξ=0.54, 闭环系统增益裕度GM=15.98 dB, 相裕度PM=870。
由此产生的横侧向内环控制器是一种线性控制器用来追踪所设定的迎角, 通过外环控制器来控制, 增加无人机横侧向稳定, 使用以下的关系:

|
(5) |
|
(6) |
根据根轨迹方法, 滚转角反馈增益Kp=0.04, Kϕ=0.35, 使得闭环增益ξ=0.35, 闭环系统增益裕度GM=13.4 dB, 相裕度PM=78°, 偏航角反馈增益Kr=0.16。机翼负扭矩常数ωo=1.8, 闭环滚转阻尼ξ=0.70, 增益裕度GM=20.30 dB, 相裕度PM=95.1°。
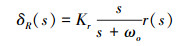
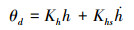
3.2 外环控制器设计外环控制器包括两部分, 垂直和水平两部分。垂直方向是一个线性控制器, 通过控制高度误差和导数, 调节飞机的操稳性。控制器提供预期的螺旋角θd输入内环控制器中:
|
(7) |
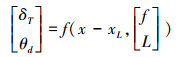
水平是一种非线性动态反演控制器, 基于控制器使用前向和后向误差作为输入, 该控制器要求滚转角和迎角指令作为内环控制器指标:
|
(8) |
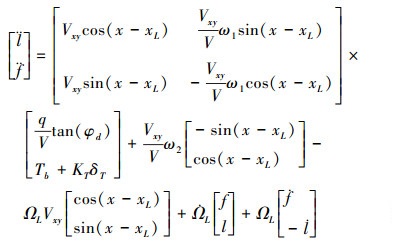
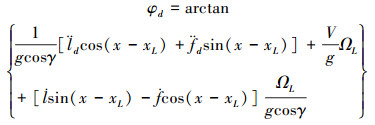
非线性动态反演控制方法, 在平面动力学范畴取消非线性, 通过使用反馈线性化模型。在一些特定的假设条件下, 这种控制方法可以使用一种简单的线性技术来实现。对于特定问题, 非线性系统的特征是以前向和后向距离误差f和l作为输出, 设定的迎角θd和滚转角δT作为输入。根据反馈线性化理论, 直到输入有确定的信号后, 才有输出。输入和输出导数是可逆的, 针对此问题, 一阶和二阶导数输出如下:

|
(9) |
|
(10) |
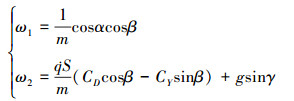
式中
|
编队在飞行过程中, 协同转弯的条件为:

|
(11) |
由此2×2矩阵相关的输入和二阶导数的输出是可逆的, 由此产生的逆关系:

|
(12) |
假定长机处于稳态过程, 则
|
(13) |
非线性动力学前馈通道描述为:
|
(14) |
输入信号为[δT φT], 忽略非线性特性, 得出以下关系:
|
(15) |
上述系统本质是一个线性系统组成的2个通道, 每个通道都有集成串联的通道, 这种系统可使用线性控制补偿器, 对于这种特殊的控制器, 设计如下控制律:

|
(16) |
选择以上的增益以便与之前设计的控制器等效, 由此产生3个通道的增益值为:

|
(17) |
无人机编队飞行过程中, 仿真初始条件设置为:H=2 000 m; V=100 m/s; α=8°; γ=0°; δe=4°; δz=0°; T=50 kN[24]; Iy=205 130 kgm2; m=15 000 kg; S=37.14 m2; c=3.35 m; xT=7.2 m; -25°≤δe≤25°; -20°≤δz≤20°。仿真曲线如图 4所示:

|
| 图 4 无人机编队飞行过程姿态变化动态特性 |
由图 4a)~f)可知, 无人机以100 km/h的速度进入机动, 随着迎角的增加, 无人机高度增加, 速度下降很快。约5.3 s时, 无人机迎角达到55°, 远远超过常规无人机机动中最大限制迎角30°, 无人机速度降到最小, 约为42 km/h, 高度增加到2.07 km。此后操控无人机减小迎角, 减小速度, 无人机高度下降, 速度增加, 约在8.3 s时, 无人机迎角改变44°, 速度恢复到58 km/h, 随后无人机逐渐增大速度, 恢复到正常稳定飞行状态, 与实际机动基本接近。
在大迎角机动过程中, 平尾偏角、推力矢量舵偏角均未超过23°。刚开始, 无人机速度逐渐增大, 平尾偏角和推力矢量舵偏角缓慢增大, 3 s时, 推力矢量舵偏角达到最大30°, 此时无人机速度也达到最大, 处于临界失速状态。7 s后, 无人机做大机动, 平尾偏角和推力矢量舵偏角处于动态变化, 最后逐渐趋于0°, 说明无人机在机动过程中保持良好的动态稳定性。俯仰角速度q达到最大至30°/s, 在刚开始的1 s, 无人机处于水平状态, 俯仰角速度为0, 随着速度增大, 3.2 s时达到最大; 之后逐渐减小, 7 s时速度最小, 无人机处于失速状态, 7 s之后, 速度逐渐恢复到稳定飞行状态, 俯仰角速度也逐渐趋向于零。此过程说明无人机在机动过程中能够保持航向稳定。
仿真结果显示, 无人机在做大迎角纵向机动过程中, 随着俯仰角、迎角的增大, 飞行速度降低, 当达到最大迎角时, 速度从100 m/s降到了42 km/s, 在7 s时俯仰角和迎角恢复, 速度也开始增加。可见, 现代无人机在纵向大迎角机动过程中能量损失非常大, 损失率约75.93%, 此时迎角必须及时恢复到稳定飞行状态时的大小, 因此现代无人机对发动机性能提出了更高要求, 要求发动机具有较大的推重比, 同时协同飞行控制系统的设计也同样重要。
4.2 编队飞行动态特性分析无人机编队稳定性控制器在设计阶段是非常关键的, 但仿真研究表明闭环系统稳定性和追踪效果, 是由测量和模型误差所引起的。下面对编队协同飞行进行稳定性进行分析:
其中编队:lc=-20 m, fc=20 m, hc=20 m
仿真初始数据[20]:
平均气动弦长: c=0.76 m, 翼展b=2 m, 翼展面积S=1.42 m2, 质量m=25 kg, 推力F=56.45 N, 惯性力矩:Ixx=1.320 kg·m2, Iyy=7.512 kg·m2, Izz=1.320 kg·m2, Ixz=-0.241 kg·m2。纵向气动导数:

|
(18) |
本文所设计的控制对于稳态误差具有很好的鲁棒性。对于闭环系统稳定评估, 在允差±5%范围内选取6个参数, 分别为τTd, CLo, CLα, Cmα, Clα和Cnβ。在以下仿真图中, 仿真结果和实际飞行数据进行比较, 尤其“长机”的飞行参数对于“僚机”作为参考, 僚机仿真的初始条件设置相同, 此时编队控制几乎接近真实僚机。仿真图如图 5所示:

|
| 图 5 无人机编队飞行误差仿真图 |
在飞行过程, 长机和僚机之间的垂直高度误差, 呈现一种颤振趋势, 之后趋于稳态。在刚开始, 长机和僚机之间存在信息传递堵塞, 曲线的振荡幅度较大, 而后趋于固定值。在无人机编队执行任务过程, 为防止无人机之间因距离过小而发生碰撞, 所设计的控制器使无人机之间的横侧向距离误差处于安全范围内某一固定值。由图 5b)可知, 在刚开始, 长机和僚机之间的横侧向距离不一致, 呈现一种偏差幅度较大的趋势, 通过反馈调节偏差逐渐减小, 而后缓慢趋于稳定。在无人机编队协同飞行过程中, 前向反馈和后向反馈调节对无人机的稳定性起着重要的作用, 它可以保持无人机编队几何队形不变, 同时每架无人机具有相同位置和姿态。如图 5c)可知, 在刚开始, 后向反馈偏振幅值较小, 同时后向反馈比前向反馈能够在较短时间达到姿态稳定。在无人机近距编队控制过程中, 所设计的闭环系统控制器, 能够使无人机之间的相对误差呈现一种先增大后逐渐减小, 最终缓慢趋于稳定的趋势。由图 5d)可知, 编队飞行前向反馈和后向反馈, 在刚开始出现小幅度的振荡, 这是由于携有雷达的“长机”从接受“僚机”距离误差信号, 到进行信号处理然后分配僚机, 在此期间, 会出现信息传递堵塞现象, 则“长机-僚机”和“僚机-僚机”出现协同飞行中距离不一致。表 1为文献[20]和本文提出高速近距控制器仿真数据对比。
从文献仿真数据和本文仿真数据对比可知:在无人机高速近距重编队过程中,平均前向距离误差,平均后向距离误差以及平均垂直距离误差均比文献仿真误差小,而且前向距离误差减小了36.217%,后向距离误差减小了5.2%,以及平均垂直距离误差减小了47.155%,说明本文所设计的控制器可使得无人机编队协同飞行过程中,能够快速近距编队重组,完成作战任务。
5 结论本文所设计的控制器是基于非线性动态反演对非线性数学模型进行控制,通过内外环协同控制,使得无人机编队从集结队形,到松散编队再到编队集结后收敛于稳定飞行状态,而且具有良好的鲁棒性。通过选取合适的反馈增益,无人机能够按照预期的轨迹和几何编队飞行,但对近距离或超近距离协同飞行而言,内环控制器在灵敏度稍微有些迟缓,下一步需要继续进行研究。
| [1] |
樊琼剑, 杨忠, 方挺, 等. 多无人机协同编队飞行控制的研究现状[J]. 航空学报, 2009, 4(4): 0683-0691.
Fan Qiongjian, Yang Zhong, Fang Ting, et al. Research Status of Coordinated Formation Flight Control for Multi-UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2009, 4(4): 0683-0691. (in Chinese) |
| [2] |
汪朝群. 红外诱饵对红外制导导弹的干扰特性及仿真[J]. 红外与激光工程, 2001, 30(4): 163-167.
Wang Chaoqun. Some Characteristics of Infrared Jam and Its Simulation Technique on Infrared Guided Missile[J]. Infrared and Laser Engineering, 2001, 30(4): 163-167. (in Chinese) |
| [3] |
樊琼剑, 杨忠, 冯茂岩. 一种基于双环控制的多无人机紧密编队飞行[C]//2008年航空宇航科学与技术全国博士生学术论坛, 2008 Fan Qiongjian, Yang Zhong, Feng Maoyan, et al. A Multi-UAV Dased on Dual-Loop Control[C]//Nation Ph D Academic Forum, 2008(in Chinese) |
| [4] | Corey J S, Rajeeva K. Adaptive Control of UAVs in Close-Coupled Formation Flight[C]//Proceedings of the American Control Conference, 2000: 849-853 |
| [5] | Hummel D. The Use of Aircraft Wakes to Achieve Power Reduction in Formation Flight[C]//Proceedings of the Fluid Dynamics Panel Symposium, 1996: 1777-1794 |
| [6] | Chichka D F, Speyer J, Park C G. Peak-Seeking Control with Plication to Formation Flight[C]//Proceedings of the 38th IEEE Conference on Decision and Control, 1999: 2463-2470 |
| [7] | Lee G, Chong N Y. Decentralized Formation Control for Small-Scale Robot Teams with Anonymity[J]. Mechatronics, 2009, 19(1): 85-105. DOI:10.1016/j.mechatronics.2008.06.005 |
| [8] | Hu A H, Cao J D, Hu M F, et al. Consensus of a Leader-Following Multi-Agent System with Negative Weights and Noises[J]. IET Control Theory & Applications, 2014, 8(2): 114-119. |
| [9] |
Ablikim M, Achasov M N, Albayrak O, et al. Observation of a Charged Charmoniumlike Structure in e+e-→(D*D*)±π at  =4.26 GeV[J]. Physical Review Letters, 2014, 112(13): 132001.
DOI:10.1103/PhysRevLett.112.132001 =4.26 GeV[J]. Physical Review Letters, 2014, 112(13): 132001.
DOI:10.1103/PhysRevLett.112.132001 |
| [10] | Xie Y Y, Wang Y, Ma Z J. Delay Consensus of Leader-Following Multi-Agent Systems[J]. Acta Physicalsinica, 2014, 63(4): 40202-040202. |
| [11] | Ji L H, Liao X F. Consensus Analysis of Multi-Agent System with Multiple Time Delays[J]. Acta Physical Sinica, 2012, 61(15): 415-418. |
| [12] | Nan Jing. Solution of a Class of Rotational Relativistic Rotation Dynamic Equation Using the Generalized Variational Iteration Theory[J]. Acta Physica Sinica, 2013, 62(4): 221-229. |
| [13] | An B R, Liu G P. Using Time Delay Compensation Scheme in Dynamic Output Feedback Controller for Networked Control Systems[J]. Acta Physica Sinica, 2014, 63(9): 972. |
| [14] | Olfati-Saber R. Flocking for Multi-Agent Dynamic Systems:Algorithms and Theory[J]. IEEE Trans on Automatic Control, 2006, 51(3): 401-420. DOI:10.1109/TAC.2005.864190 |
| [15] | Su Z, Bai Z S, Xu J, et al. Synthesis, Structure and Property of Cobalt (Ⅱ) Complexes with 3, 5-di Benzoic Acid[J]. Cryst Eng Comm, 2009, 11(5): 873-880. DOI:10.1039/b822394g |
| [16] | Oh K K, Ahn H S. Formation Control of Mobile Agents Based on Inter-Agent Distance Dynamics[J]. Automatica, 2011, 47(10): 2306-2312. DOI:10.1016/j.automatica.2011.08.019 |
| [17] | Afkhami A, Soltani-Felehgari F, Madrakian T, et al. Fabrication and Application of a New Modified Electrochemical Sensor Using Nano-Silica and a Newly Synthesized Schiff Base for Simultaneous Determination of Cd2+, Cu2+ and Hg2+ Ions in Water and Some Foodstuff Samples[J]. Analytica Chimica Acta, 2013, 771: 21-30. DOI:10.1016/j.aca.2013.02.031 |
| [18] | Ablikim M, Achasov M N, Ai X C, et al. Observation of a Charged Charmoniumlike Structure in e+e-→(D*D*)±π at s=4.26 GeV[J]. Physical Review Letters, 2014, 112(13): 132001. DOI:10.1103/PhysRevLett.112.132001 |
| [19] |
祁圣君, 张喆. 无人机近距编队飞行建模与仿真[J]. 航空工程进展, 2012, 3(3): 0366-0367.
Qi Shengjun, Zhang Zhe. Modeling and Simulation of UAV Close Formation Flight Control[J]. Advances in Aeronautical Science and Engineering, 2012, 3(3): 0366-0367. (in Chinese) |
| [20] | Gu Y, Seanor B, Campa G, et al. Design and Flight Testing Evaluation of Formation Control Laws[J]. IEEE Trans on Control Systems Technology, 2006, 14(6): 1105-1112. DOI:10.1109/TCST.2006.880203 |
| [21] | Roskam J. Airplane Flight Dynamics and Automatic Flight Controls[J]. Design Analysis & Research Corporation, 1995, 32(3): 0792-0799. |
| [22] | Stevens B L, Lewis F L, Johnson E N. Aircraft Control and Simulation:Dynamics, Controls Design, and Autonomous Systems[M]. England: Johnson Wiley, 2015. |
| [23] | Rauw M O. FDC 1.2-A Simulink Toolbox for Flight Dynamics and Control Analysis[J]. Gemeente Zeist, 2001, 1(99): 7. |
| [24] | Goman M, Khrabrov A. State-Space Representation of Aerodynamic Characteristics of an Aircraft at High Angles of Attack[J]. Journal of Aircraft, 1994, 31(5): 1109-1115. DOI:10.2514/3.46618 |
2. School of Mechano-Electronic Engineering, Xidian University, Xi'an 710071, China;
3. College of Equipment Management and Safety Engineering, Air Force Engineering University, Xi'an 710051, China
