

2. 西安外事学院 工学院, 陕西 西安 710077;
3. 中国船舶重工集团公司 办公厅, 北京 100097
波达方向(direction of arrival, DOA)估计是阵列信号处理的一个重要研究课题,在雷达、声呐、通信等领域有着广泛的应用。一般来说,DOA估计方法大都是建立在直达波模型上,忽略多径或想办法消除多径带来的影响[1-3],其把多径看作是一个不利的因素;在直达波模型基础上,提出了各种各样的波达方向估计方法,但这些方法大都建立在高信噪比条件下,在低信噪比时算法性能下降,甚至失效。
近些年提出的时间反转[4](time reversal,TR或时反)方法,由于利用了声互易性及时反不变性原理,可自适应地修正多径信道引起的信号畸变,使目标在源位置获得空时聚焦,因此可将时反方法应用于目标的DOA估计中,尝试解决低信噪比情况下常规方法无法正确估计的问题。
其中,文献[5-6]将主动时反(active time reversal, ATR)方法分别应用到探地雷达和移动通信网络的目标DOA估计中,各自推导了TR/DOA估计器的CRB,并和未引入TR的DOA估计器性能进行了比较;仿真结果表明,引入TR方法后DOA估计器的性能得到了提高。文献[7]在文献[6]的基础上,加入了距离估计器,实现了对单目标的主动定位。文献[8]在文献[7]的基础上,研究了多输入多输出(MIMO)系统中的目标DOA问题,建立了TR/MIMO模型;随后文献[9]又将TR引入多普勒频移条件下的MIMO雷达目标DOA估计中;文献[10]将压缩感知(compressive sensing, CS)和TR技术结合应用到MIMO雷达,实现了DOA、DOD(direction of departure)及多普勒频移的联合估计。文献[11]提出了一种虚拟时间反转(virtual time reversal, VTR)DOA估计算法,应用于空间电磁辐射源的远场窄带信号源方位角的被动估计中,通过查找扫描区域中能量最大的点来确定辐射源的方位角。以上电磁波领域的时反DOA估计方法,对实现水下目标的时反DOA估计有一定的借鉴意义。
文献[12]针对均匀浅海目标DOA估计,提出了一种基于非均匀线列阵(non-uniform line array, NLA)的被动时反(passive time reversal, PTR)超指向性模型,从信号检测角度建立了仿真所需模型,采用常规波束形成方法,实现了低信噪比情况下目标的方位估计。文献[13]针对水下声多径时变信道,提出了一种多普勒效应下的TR目标定向算法,通过频率补偿与时间反转处理后,可以精确地实现目标定向。以上水下目标时反定向方法建立在被动时反方法基础上,首先需解决如何精确获取真实海洋信道的问题,因为只有当模拟信道与实际海洋信道完全匹配时,才能达到理想的TR空时聚焦效果,从而达到精确DOA估计的目的。
主动时间反转相对被动时间反转,由于利用了海洋信道传播的互易性,无需环境的先验知识,可简化信号处理的运算量,相比而言更适用于恶劣环境,物理上更容易实现。
基于此,本文将结合前期研究的主动时反聚焦特性[14-15]和探测特性[16],进一步利用主动时间反转方法对水下目标的俯仰角DOA估计问题进行研究,基于水声信道的射线理论和阵列信号处理中的直达径模型,建立了基于均匀线列阵(uniform line array, ULA)的常规多径DOA估计和主动时反DOA估计模型,应用Capon算法对所建模型进行了DOA估计实现,对有无主动时反时的估计算法性能进行了比较。仿真结果表明,在同样的信噪比情况下,所提出的主动时反DOA方法可以获得比常规方法更好的估计结果,尤其是在低信噪比情况下更为明显。
1 均匀线列阵多径DOA估计模型基于射线理论的均匀线列阵多径DOA估计如图 1所示。

|
| 图 1 均匀线列阵多径DOA估计模型 |
图中,收发合置换能器阵(source-receive array, SRA)为均匀线列阵,其阵元个数为P,阵元间距为d;为方便表示,图中只画出了目标与SRA之间的3条传播路径:直达波、海面反射波与海底发射波,其入射角分为θ, α, β。但为更具有一般性,后面推导的声传播路径不止局限于这3条径,而采用N条径表示。
1.1 常规多径DOA估计模型位于k阵元的PS(探测声源)发射信号f(t), 根据射线理论, 设发射声源与目标之间的信道传输函数为:

|
(1) |
式中, N表示声线总数, ckn, τkn分别表示第k个阵元和目标之间第n条本征声线(也可认为是传播路径)对应的衰减幅度和时延。忽略探测声源到目标的信道噪声, 则目标接收到的信号为:

|
(2) |
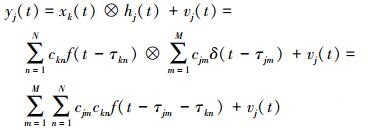
忽略目标反射的影响(即假定目标反射系数为1), 考虑接收过程噪声的影响, 则SRA第j个阵元接收的信号为:
|
(3) |
式中, hj(t)表示目标与第j个阵元之间的信道函数, vj(t)表示第j个阵元接收的环境噪声, cjm, τjm分别表示目标和第j个阵元之间的第m条路径对应的衰减幅度和时延。根据对海洋声场的仿真可知, 目标经第m条径到达各个阵元的衰减幅度差别非常小, 为了简化表示, 可认为其只和路径有关, 而与阵元无关, 即可将cjm表示成cm。
设发射信号形式为:f(t)=s(t)ejωct, 结合阵列信号处理的远场窄带模型理论, (3)式可表示为:
|
(4) |
式中, τ1m表示的是目标到达阵元1的第m条径的时延, Δτjm表示的是目标经过第m条径到达j阵元与第1阵元的相对时延。
将第j个阵元接收信号推广到各个阵元, 并表示成矩阵形式, (4)式可变为:

|
(5) |
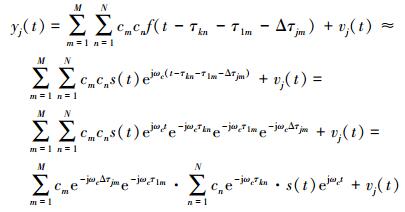
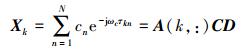
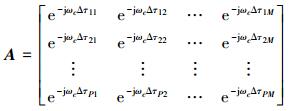
式中, Y(t)=[y1(t), …, yP(t)]T表示SRA的1-P个阵元接收到的信号; A为P×M矩阵, 表示相对首阵元的时延矩阵, 如(6)式所示; C为M阶对角矩阵, M为目标到各阵元的路径总数, 其对角元素cm表示目标经过第m条路径到达各阵元的衰减幅度; F(t)=s(t)ejωct称为发射矩阵; D=[e-jωcτ11, e-jωcτ12, …, e-jωcτ1M]T表示的是目标到阵列1的时延矩阵。
|
可认为是从k阵元发射的信号经过信道到达目标的接收信号矩阵; V(t)表示噪声矩阵。
|
(6) |
参考阵列信号处理理论, 当均匀线列阵的阵元间距为d时, 可将(6)式表示成:
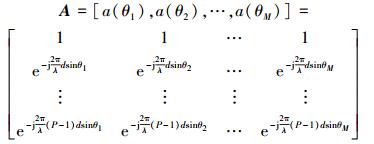
|
(7) |
A为包含了多径信息的阵列流形矩阵(又称:方向矩阵), 主要取决于阵列结构与目标来波方向, 其中第m列各量代表的是目标经过第n条径到达各阵元的信息; θM表示目标到阵元的第m条径的角度信息。
1.2 基于ATR的多径DOA估计模型考虑主动时反情况, 将SRA各阵元接收信号分别进行时反, 以第j个阵元为例, 有:

|
(8) |
式中, 

|
(9) |
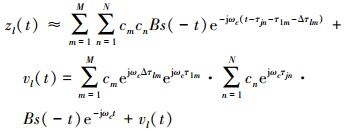
将其作为二次发射信号重新发射到信道中, 依然满足远场窄带模型理论; 重复上述第一次过程, 参考(1)~(4)式, 设时反后第l个阵元接收信号为zl(t), 有:
|
(10) |
再参考(5)~(7)式, 可得第j个阵元时反发射后SRA接收信号Zj(t)为:

|
(11) |
式中, 符号“*”表示共轭, C, A, D, V同(5)式, Xj和(5)式中的Xk意义相同, 只不过Xk为k阵元发射的接收信号矩阵, Xj为j阵元发射的接收信号矩阵。
将SRA的第j个阵元时反发射情况推广到所有阵元, 可得时反后SRA的接收信号总和为:

|
(12) |
根据阵列信号处理理论, Capon算法的目的是想办法减小噪声和期望信号以外的干扰信号功率, 同时把期望方向的信号功率维持在一定增益上[17], 结合(5)式建立的模型可将Capon算法表示成以下最小值问题:
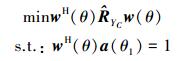
|
(13) |
式中,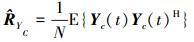
利用Lagrange乘子法可求得上述问题的解为:
|
(14) |
将(14)式带入(13)式可得,期望方向以外功率最小时期望方向的功率最大,为:
|
(15) |
因此Capon算法的空间谱可定义为:

|
(16) |
通过对(16)式进行谱峰搜索可求出目标的DOA值。式中:

|
(17) |
根据(12)式,遵循上述常规DOA估计同样的步骤,有:

|
(18) |
式中,
|
(19) |
通过对(19)式进行谱峰搜索可求出目标的DOA值。
相对常规Capon算法,主动时反算法中的目标反射信号,由于在接收阵进行了时反操作后重新发射到目标上,根据时反的聚焦特性可知,SRA各阵元的二次发射信号将会在目标处形成聚焦,该过程相当于波束形成过程将波束聚焦在了目标上,只不过时反方法由于利用了多径,相对波束形成其聚焦在目标上的能量更大。同时,文献[16]论证了单阵元主动时反探测阵可提高接收信号的信噪比,此结论可推广至多阵元探测。从以上2个角度可知,利用主动时反方法进行目标的DOA估计,其估计的精度会更高,抑制旁瓣的能力会更强。
3 仿真研究考虑均匀浅海波导环境,各深度声速均为1.5 km/s。仿真模型参考图 1,其中时反阵(SRA)取12个阵元,阵元间距为0.75 m,首阵元1#距离水面75 m;PS的深度为78.75 m,目标深度165.5 m,PS与目标的水平距离为1 km,海深300 m;PS发射频率为1 kHz的CW信号,快拍数取1 000。
按以上条件,在MATLAB仿真环境下,利用Bellhop专用仿真工具箱模拟海洋声场环境,忽略海面或海底的多次反射路径,只考虑图 1所示的3条传播路径情况,可得到目标与SRA各阵元之间的各路径的时延、幅值及角度信息。通过仿真可知,目标反射的声波经海面一次反射径(或直达径,或海底一次反射径)到达各阵元的幅值和角度信息非常接近,可近似将同一路径的值取为一个值;按以上路径顺序,到达各阵元的幅度信息依次约为:{0.65×10-3, 1.0×10-3, 0.5×10-3},角度依次约为:{13.68°, -5.00°, -19.58°};目标到参考阵元(首阵元)的时延值依次为:{0.686, 0.669, 0.708},其他参数略。
为了对比同样条件下引入主动时反前后Capon算法的性能,信噪比定义为:考虑多径时的首次接收信号中信号与噪声的比值;主动时反二次接收信号加入和首次接收信号一样的噪声。
图 2和图 3分别为信噪比分别为-15 dB和-20 dB时常规Capon算法和加入主动时反后的ATR Capon算法的DOA估计图,图中竖线表示角度期望值。

|
| 图 2 SNR=-15 dB时Capon算法和ATR Capon算法的DOA估计图 |

|
| 图 3 SNR=-20 dB时Capon算法和ATR Capon算法的DOA估计图 |
从图 2可以看出,在信噪比为-15dB时,ATR Capon算法的旁瓣远低于其相应主瓣能量,估计值更接近于待估计目标期望值,且分辨率高于常规Capon算法;当信噪比为-20 dB时,常规Capon算法已不能正确估计出目标,而ATR Capon算法估计出的目标值基本不变。
为了更好地比较出以上2种算法的性能,对上述2种算法分别做了1 000次蒙特卡罗仿真,比较在不同信噪比情况下,2种算法估计的均方根误差(RMSE)情况,如图 4所示。从图 4中可以看出,当信噪比大约从-12 dB开始2种算法的RMSE非常接近,故图 5放大了-12~0 dB的情况。

|
| 图 4 Capon算法和ATR Capon算法的DOA估计均方根误差分析图 |

|
| 图 5 信噪比为-12~0 dB时Capon算法和ATR Capon算法的DOA估计均方根误差分析图 |
综合图 4和图 5可以看出,ATR Capon算法估计出的角度均方根误差要小于常规Capon算法,尤其是当信噪比非常低时,ATR Capon算法的优势尤为明显。
4 结论本文利用主动时间反转方法研究了浅海目标DOA估计性能。仿真结果表明:在低信噪比情况下,基于ATR Capon方法的DOA估计相对于常规Capon方法的DOA,分辨率更高,抑制旁瓣的能力更强,估计结果更准确,可很好地应用于低信噪比多径条件下的DOA估计。
| [1] | Daeipour E, Blair W D, Bar-Shalom Y. Bias Compensation and Tracking with Monopulse Radars in the Presence of Multipath[J]. IEEE Trans on Aerospace and Electronic Systems, 1997, 33(3): 863-882. DOI:10.1109/7.599258 |
| [2] | Garber S M. High Resolution Sonar Signals in a Multipath Environment[J]. IEEE Trans Aerospace and Electronic Systems, 1966, AES-2(6): 431-440. DOI:10.1109/TAES.1966.4502039 |
| [3] | Derryberry J H, Gregg W D. On Optimizing Array Reception of Multipath[J]. IEEE Trans on Aerospace Electronic System, 1970, AES-6(2): 188-199. DOI:10.1109/TAES.1970.310101 |
| [4] | Mathias Fink. Time Reversal of Ultrasonic Fields-Part Ⅰ:Basic Principles[J]. IEEE Trans on Ultrasonics Ferroelectrics and Frequency Control, 1992, 39(5): 555-566. DOI:10.1109/58.156174 |
| [5] | Foroohar Foroozan, Amir Asif. Cramer-Rao Lower Bound for Time Reversal Active Array Direction of Arrival Estimation in Multipath Environment[C]//2010 IEEE International Conference on Acoustics, Speech and Signal Prolessing: 2646-2649 http://ieeexplore.ieee.org/document/5496261/ |
| [6] | Foroohar Foroozan, Amir Asif. Time Reversal Direction of Arrival Estimation with Cramer-Rao Bound Analysis[C]//2010 IEEE Global Telecommunications Conference: 1-5 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=5683345 |
| [7] | Foroohar Foroozan, Amir Asif. Time Reversal Based Active Array Source localization[J]. IEEE Trans on Signal Processing, 2011, 59(6): 2655-2668. DOI:10.1109/TSP.2011.2128317 |
| [8] | Foroohar Foroozan, Amir Asif. Direction Finding Algorithms for Time Reversal MIMO Radars[C]//2011 IEEE Statisticol Signal Processing Workshop: 433-436 http://ieeexplore.ieee.org/document/5967724/ |
| [9] | Foroohar Foroozan, Amir Asif. Time Reversal MIMO Radar for Angle-Doppler Estimation[C]//2012 IEEE Statistical Signal Processing Workshop: 860-863 http://ieeexplore.ieee.org/document/6319843/ |
| [10] | Mohammad H S, Sajjadieh, Amir Asif. Compressive Sensing Time Reversal MIMO Radar:Direction and Doppler Frequency Estimation[J]. IEEE Tran on Signal Processing Letters, 2015, 22(9): 1283-1287. DOI:10.1109/LSP.2015.2396650 |
| [11] | Fu Yongqing, Liu Wei, Bai Ruijie, et al. A Novel Virtual Time Reversal Method for Passive Direction of Arrival Estimation[J]. Mathematical Problems in Engineering, 2015(2015): 1-12. |
| [12] |
杨伏洲, 王海燕, 申晓红, 等. 基于时间反转的非均匀线列阵超指向性阵元分布模型[J]. 上海交通大学学报, 2013, 47(12): 1907-1910.
Yang Fuzhou, Wang Haiyan, Shen Xiaohong, et al. Super-Direction Element Distribution Model of NLA Based on TR[J]. Journal of Shanghai Jiaotong University, 2013, 47(12): 1907-1910. (in Chinese) |
| [13] | Shao Jianfeng, Zhang Xiaomin, Liu Yihai, et al. Estimation of Time Reversal Target DOA over Underwater Acoustic Multipath Time-Varying Channel[C]//2014 IEEE China Summit and International Conference on Signal and Infomation Processing: 795-799 http://ieeexplore.ieee.org/document/6889354/ |
| [14] |
荆海霞, 李洪义. 基于主动时间反转的水下目标自适应聚焦研究[J]. 电子设计工程, 2015, 23(24): 12-15.
Jing Haixia, Li Hongyi. Self-Adaptive Focusing of Underwater Target Based on Active Time Reversal[J]. Electronic Design Engineering, 2015, 23(24): 12-15. DOI:10.3969/j.issn.1674-6236.2015.24.004 (in Chinese) |
| [15] |
荆海霞, 申晓红, 王海燕. 浅海声源信道中信号优化探测研究[J]. 计算机仿真, 2016, 33(10): 157-161.
Jing Haixia, Shen Xiaohong, Wang Haiyan. Signal Optimization Detection in Acoustic Source Channel under Shallow Water[J]. Computer Simulation, 2016, 33(10): 157-161. DOI:10.3969/j.issn.1006-9348.2016.10.034 (in Chinese) |
| [16] |
荆海霞, 申晓红, 刘镭. 基于主动时间反转的目标探测性能研究[J]. 电视技术, 2016, 40(8): 103-107.
Jing Haixia, Shen Xiaohong, Liu Lei. Performance Study of Target Detection Based on Active Time Reversal[J]. Video Engineering, 2016, 40(8): 103-107. (in Chinese) |
| [17] |
孙超. 水下多传感器阵列信号处理[M]. 西安: 西北工业大学出版社, 2007.
Sun Chao. Underwater Multi-sensor Array Signal Processing[M]. Xi'an: Northwestern Polytechnical University Press, 2007. (in Chinese) |
2. School of Engineering, Xi'an International University, Xi'an 710077, China;
3. China Shipbuilding Industry Corporation, Beijing, 100097, China
