

风能作为一种清洁的可再生能源,在新能源开发利用方面占据着重要地位。在丹麦,大约20%的电力由风能提供,未来这一比例将增长到50%[1]。风机运行过程中会产生很大的噪音,不适合安装在靠近人类生活区的陆上及近岸浅水区域,而在深海区安装海上浮动风机可以避免此问题,并且通过安装几十台甚至上百台的风机形成风场,充分将海上风能转化为电能[2-3]。因此,海上浮动风机的发展对风能的利用具有重要的意义。
在恶劣的海洋环境中,海上浮动风机受到极端风浪载荷作用,在塔顶和叶尖产生较大的位移,塔根和叶根部位产生过大的弯矩与剪力。基于风机自身的控制系统[4-8],通过调节叶片桨距角和电机扭矩的方式减小风机结构的振动响应,其减振效果有限,并且会使风机桨叶受风面积减少及转子转速降低,导致发电量减少。因此,通过TMD被动控制技术抑制海上浮动风机结构的动态响应,保证风机正常工作十分必要。
目前,Colwell等[9]对近岸单桩式海上风机的振动响应和载荷进行了研究;Steward等[10]研究了单桩式海上风机在风浪载荷下的振动响应,并对塔底疲劳载荷进行了分析;Jonkman等[11]基于美国国家可再生能源实验室NREL开发的气动-水动-结构-伺服全耦合海上浮动风机设计软件FAST,分析了不同工况下Barge式海上风机的振动响应;Tumewu等[12]采用数值模拟的方法,研究了平台的俯仰角运动对风机发电效率的影响;Lackner等[13-14]首先提出了在海上浮动风机结构振动控制中采用TMD的设想,研究了TMD对Spar、Barge、TLP等类型的风机的减振效果,但未对TMD参数做优化分析,导致其抑振率只有10%左右;Stewart等[15]建立了3种类型的海上浮动风机的三自由度动力学简化模型,采用3组不同的TMD最优参数,简单分析了TMD对风机的减振效果;He等[16-17]对Barge式海上浮动风机配置了机舱TMD,研究了在风浪联合载荷下的TMD抑振效果,证明塔顶纵向位移抑制率约38.7%。考虑到风机机舱空间较小,机舱TMD的运动行程有限,且安装维修不便,因此,浮动平台内TMD对海上浮动风机的振动抑制研究工作是一个全新的途径。
本文针对Barge式海上浮动风机,建立其动力学简化模型,并对TMD参数进行优化;在不同工况下分析TMD的减振效果;为保证风机结构设计不发生改变,用TMD代替部分平台压舱物,在风浪载荷作用下,研究TMD对浮动风机关键部位的动态响应与载荷的影响,为我国未来大型海上浮动风机的振动响应及振动抑制提供有效的技术储备。
1 海上浮动风机动力学模型的建立 1.1 海上风机动力学简化模型的建立本文采用Lagrange方程建立Barge式海上浮动风机的三自由度动力学模型。自由度分别选取平台俯仰转角θp、塔根转角θt、平台TMD水平位移xT等, 结构模型如图 1所示。

|
| 图 1 Barge式海上浮动风机模型图 |
假定塔架为刚性梁结构, 其下端通过弹性铰支座与浮动平台连接; 浮动平台通过锚线与海底相连, 锚线固定于海底; 参考点选取平均海平面MSL与Z轴的交点; 忽略转子、发电机和传动系统的动态响应; TMD的最大限位设置为±18 m。
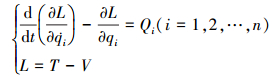
含有n个广义坐标qi形式的Lagrange方程可以表示为:
|
(1) |
式中, T为系统总动能; V为系统总势能; L为Lagrange乘子; Qi为非有势力; 
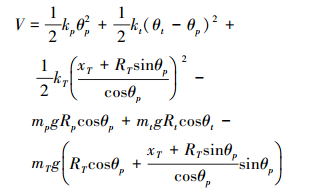
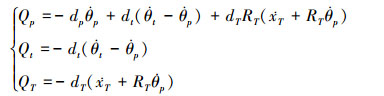
Barge式海上浮动风机系统的总动能、总势能、非有势力分别表示为:

|
(2) |
|
(3) |
|
(4) |
式中, I和m为转动惯量与质量; θ和x为相对于Z轴的转角位移与线位移; k和d为刚度和阻尼; R为质心到参考点距离; 下标p, t, T分别为平台、塔架和TMD。
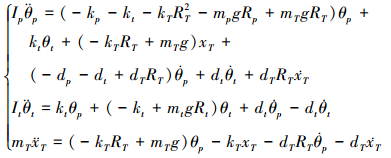
将公式(2)~(4)代入公式(1)中, 考虑到浮动平台在工况环境下的倾角不大于10°, 因此方程可以线性化为公式(5)。
|
(5) |
方程(5)为Barge式风机的三自由度动力学简化模型。可取U=[dp dt kp kt Ip It]T为未知的结构参数组成的向量。表 1为采用Levenberg-Marquardt法对未知的风机结构参数估计的结果。
| 参数 | dp | dt | kp | kt | Ip | It |
| 初始值 | 4.5×107 | 4.9×107 | 1.65×109 | 1.45×1010 | 9×108 | 3×109 |
| 估计值 | 4.86×107 | 2.93×107 | 1.78×109 | 1.29×1010 | 1.98×109 | 2.83×109 |
假定平台初始转角为5°, 通过比较推导的三自由度动力学简化模型和FAST耦合模型的平台俯仰角及塔顶纵向位移的拟合程度来验证模型的正确性。动力学简化模型和FAST耦合模型的结果比较见图 2。可以看出2个模型的误差极小, 拟合程度非常好。

|
| 图 2 动力学模型和FAST模型的关键部位响应比较 |
在风浪载荷作用下, 塔顶纵向位移决定了风机桨叶受风面积, 进而影响发电效率, 并且塔顶纵向位移标准差与塔架的疲劳载荷有很大关系。因此, 定义塔顶纵向位移标准差的抑制率[17]:
|
(6) |
式中, σs, σt分别是无TMD和有TMD的塔顶纵向位移标准差。
Barge式浮动风机的总质量为6.15×106 kg, TMD的质量比μ取5%~19%, 取不同的刚度和阻尼, 分别计算塔顶纵向位移标准差的抑制率η。
2.1 工程调频法Barge式浮动风机平台俯仰振动的第一阶固有频率为0.084 Hz[15], 根据不同的TMD阻尼, 计算风机关键部位的最大抑振率。表 2为采用工程调频法计算的最优TMD参数。由表 2还可以看出, 2种模型的抑制率计算结果拟合非常好。
| 质量/kg | 质量比/% | 刚度/(N·m-1) | 阻尼/(Ns·m-1) | 本文抑制率/% | FAST抑制率/% |
| 307 500 | 5 | 87 502 | 44 000 | 35.94 | 33.59 |
| 492 000 | 8 | 140 000 | 88 800 | 38.35 | 36.66 |
| 738 000 | 12 | 210 010 | 164 000 | 40.07 | 38.91 |
| 922 500 | 15 | 262 510 | 231 000 | 40.91 | 40.03 |
| 1 045 500 | 17 | 297 510 | 280 400 | 41.35 | 40.63 |
| 1 168 500 | 19 | 332 510 | 333 400 | 41.72 | 40.92 |
图 3为塔顶纵向位移抑制率的增长率。可知, 当TMD的质量比μ从5%增加到19%时, 简化模型计算的抑制率的增长率从3.3%下降到0.45%, FAST耦合模型的计算结果从4.9%减少到0.07%, 可认为增加TMD质量对浮动风机的减振性能提升不明显, 此时对应的参数为TMD最优参数。

|
| 图 3 减振性能的增长率 |
将塔顶纵向位移标准差的倒数作为遗传算法的适应度函数, 采用轮盘赌选择, 交叉概率取0.7, 变异概率取0.005, 种群数为100, 遗传代数为30, 计算不同TMD质量比下的最优刚度、阻尼和塔顶纵向位移标准差的抑制率。
表 3为使用GA算法计算的最优TMD参数和塔顶纵向位移标准差的抑制率。可以看出, 塔顶纵向位移抑制率和工程调频法计算结果拟合非常好; 当质量比μ从5%增加到19%时, 抑制率从36.10%增加到41.79%。
| 质量/kg | 质量比/% | 刚度/(N·m-1) | 阻尼/(Ns·m-1) | 抑制率/% |
| 307 500 | 5 | 83 108 | 43 512 | 36.10 |
| 492 000 | 8 | 136 597 | 88 877 | 38.36 |
| 738 000 | 12 | 211 314 | 166 618 | 40.08 |
| 922 500 | 15 | 273 040 | 230 215 | 40.93 |
| 1 045 500 | 17 | 313 965 | 276 764 | 41.39 |
| 1 168 500 | 19 | 356 685 | 327 575 | 41.79 |
图 4为TMD质量比μ=5%时适应度函数值随遗传代数的增加而变化的曲线。可知, 在第8代最大适应度函数达到最大值, 表明此时TMD参数值达到稳定状态。

|
| 图 4 适应度函数随代数变化规律 |
图 5为TMD质量比μ=19%时平台俯仰角和TMD行程的时程曲线图。可以看出, 在t=40 s时, 平台的俯仰角接近于0, TMD行程趋近于0, 因此最优参数TMD对浮动平台有着很好的减振效果。

|
| 图 5 最优参数TMD的减振性能 |
为了研究真实海洋环境下TMD的减振机理和对Barge式浮动风机的减振效果, 选取5组风浪联合工况, 见表 4。5组工况下的波谱周期取11.9 s[15]。
取TMD质量比μ=19%, 根据最优TMD参数, 在工况1、4时,平台俯仰角和TMD行程的相位关系如图 6所示。可以看出, 浮动平台和TMD相位差为π/2。

|
| 图 6 平台俯仰角和TMD行程的相位关系 |
图 7为TMD质量对平台质心的重力矩、刚度kT提供的弹簧力、阻尼dT提供的阻尼力对浮动风机减振性能的贡献。可知, TMD的重力矩对浮动平台抑振的贡献最大。

|
| 图 7 TMD重力矩、弹簧力和阻尼力对风机减振的贡献 |
图 8为TMD质量比μ=19%在工况5条件下Barge式浮动风机平台俯仰角和塔顶纵向位移的功率谱密度(PSD)曲线。从图中可以看出, PSD的峰值集中在0.05~0.15 Hz之间; 无TMD时, PSD最大幅值对应的频率为0.076 Hz, 和Barge式浮动风机俯仰运动的一阶自振频率接近; 装配TMD后, 平台俯仰角和塔顶纵向位移功率谱密度幅值减少约82%。

|
| 图 8 Barge式海上浮动风机的功率谱密度比较 |
表 5为质量比μ=19%的TMD在5种工况下对风机关键部位的抑振率。由表可知, TMD对Barge式浮动风机的关键部位有着很好的减振效果, 平台俯仰角、塔顶纵向位移、塔根纵向弯矩与剪力的标准差抑制率均在16%以上, 最高达到47.95%, 叶根纵向弯矩与剪力的标准差抑制率约为6%~33%。
| 关键部位评估指标 | 标准差抑制率/% | ||||
| 工况1 | 工况2 | 工况3 | 工况4 | 工况5 | |
| 平台俯仰角 | 46.46 | 36.04 | 23.68 | 34.73 | 47.95 |
| 塔顶纵向位移 | 38.34 | 27.70 | 16.88 | 26.84 | 38.64 |
| 塔根纵向弯矩 | 38.40 | 28.00 | 16.93 | 26.89 | 38.78 |
| 塔根纵向剪力 | 38.35 | 28.37 | 17.07 | 26.94 | 38.87 |
| 叶根纵向弯矩 | 25.99 | 6.70 | 9.82 | 21.62 | 31.45 |
| 叶根纵向剪力 | 29.37 | 9.67 | 11.49 | 23.53 | 33.68 |
当在Barge式浮动风机的平台内配置质量比μ=19%的TMD时,在5种工况下浮动平台的沉降量最大增加0.8m,增幅可达21%,这样势必会对浮动风机的整体结构设计造成影响。为了减小这种影响,提出用TMD等质量替换部分压舱物的方法,达到风机减振的目的。
图 9为TMD替换平台压舱物前后风机关键部位的振动响应与载荷比较图。

|
| 图 9 风机关键部位的抑振率 |
可见,在5种典型工况中,等质量替换后,平台俯仰角的减振率最小为26.4%,最大为50%,塔顶纵向位移标准差的抑制率为18.68%~40.62%。另外,根据计算结果,塔根纵向弯矩的减振率为18.76%~40.77%,塔根纵向剪力的减振率约为19%~40%,叶根纵向弯矩的减振率为6.92%~33.17%,叶根纵向剪力减振率最小为9.95%,最大为35.49%。由此可知,在不改变浮动风机平台总质量的前提下,将部分压舱物等质量替换为配置的TMD后,其减振性能增大2%左右。
根据提出的方法,在额定工况下,与μ=19%相比,μ=30%时风机关键部位载荷及动态响应的抑振率仅增加了2%。因此,建议设计中使用质量比不大于20%的TMD实现等质量替换,以达到有效抑振增稳的目的。
5 结论1) 在Barge式浮动风机平台内配置TMD可以有效抑制风机振动。风浪载荷作用下,TMD对平台俯仰运动的抑制率可达47.95%,对塔顶纵向位移的抑制率为16.88%~38.64%,对关键部位载荷的抑制率最高可达38.87%。
2) TMD行程和平台俯仰角的相位相差π/2;相对于TMD提供的弹簧力和阻尼力,TMD对平台质心的重力矩是浮动风机减振的主要因素。
3) 随着TMD质量的增加,其对风机的减振效果不断增大;当TMD的质量比大于19%时,减振性能提升不明显,因此,可认为Barge式浮动风机的最优TMD质量比为19%。
4) 当TMD的质量比为19%时,用TMD等质量替换风机部分压舱物,对浮动平台的减振效果可达50%,因此在Barge浮动风机设计时,可以考虑尽量将静态压舱物替换为等质量的TMD,以达到最佳的减振效果。
| [1] | Sun X, Huang D. The Current State of Offshore Wind Energy Technology Development[J]. Energy, 2012, 41(1): 298-312. |
| [2] | Breton S P, Moe G. Status, Plans and Technologies for Offshore Wind Turbines in Europe and North America[J]. Renewable Energy, 2009, 34(3): 646-654. DOI:10.1016/j.renene.2008.05.040 |
| [3] | Snyder B, Kaiser M J. Ecological and Economic Cost-Benefit Analysis of Offshore Wind Energy[J]. Renewable Energy, 2009, 34(6): 1567-1578. DOI:10.1016/j.renene.2008.11.015 |
| [4] | Solingen E, Wingerden J W. Linear Individual Pitch Control Design for Two-Bladed Wind Turbines[J]. Wind Energy, 2015, 18(4): 677-697. DOI:10.1002/we.v18.4 |
| [5] | Magar K T, Balas M J, et al. Direct Adaptive Control for Individual Blade Pitch Control of Wind Turbines for Load Reduction[J]. Journal of Intelligent Material Systems and Structures, 2015, 26(12): 1564-1572. DOI:10.1177/1045389X14566527 |
| [6] | Jiang Z, Karimirad M, et al. Dynamic Response Analysis of Wind Turbines under Blade Pitch System Fault, Grid Loss, and Shutdown Events[J]. Wind Energy, 2014, 7(9): 1385-1409. |
| [7] | Namik H, Stol K. Performance Analysis of Individual Blade Pitch Control of Offshore Wind Turbines on Two Floating Platforms[J]. Mechatronics, 2011, 21(4): 691-703. DOI:10.1016/j.mechatronics.2010.12.003 |
| [8] | Lackner M A. Controlling Platform Motions and Reducing Blade Loads for Floating Wind Turbines[J]. Wind Energy, 2009, 33(6): 541-543. |
| [9] | Colwell S, Basu B. Tuned Liquid Column Dampers in Offshore Wind Turbines for Structure Control[J]. Engineering Structures, 2009, 31(2): 358-368. DOI:10.1016/j.engstruct.2008.09.001 |
| [10] | Stewart G M, Lackner M A. The Impact of Passive Tuned Mass Dampers and Wind-Wave Misalignment on Offshore Wind Turbine Loads[J]. Engineering Structures, 2014, 73: 54-61. DOI:10.1016/j.engstruct.2014.04.045 |
| [11] | Jonkman J M. Dynamics of offshore Floating Wind Turbines Model Development and Verification[J]. Wind Energy, 2009, 12(5): 459-492. DOI:10.1002/we.v12:5 |
| [12] | Tumewu Y, Petrone C, et al. Numerical Simulation of the Influence of Platform Pitch Motion on Power Generation Steadiness in Floating Offshore Wind Turbines[J]. Environmental Science & Sustainable Development, 2017, 1(2): 1-10. |
| [13] | Lackner M A, Rotea M A. Passive Structure Control of Offshore Wind Turbines[J]. Wind Energy, 2011, 14(3): 373-388. |
| [14] | Lackner M A, Rotea M A. Structural Control of Floating Wind Turbines[J]. Mechatronics, 2011, 21(4): 704-719. DOI:10.1016/j.mechatronics.2010.11.007 |
| [15] | Stewart G M, Lackner M A. Offshore Wind Turbine Load Reduction Employing Optimal Passive Tuned Mass Damping Systems[J]. IEEE Trans on Control System Technology, 2013, 21(4): 1090-1104. DOI:10.1109/TCST.2013.2260825 |
| [16] | Hu Y, He E. Active Structural Control of a Floating Wind Turbine With a Stroke-Limited Hybrid Mass Damper[J]. Journal of Sound and Vibration, 2017, 410: 447-472. DOI:10.1016/j.jsv.2017.08.050 |
| [17] | He E, Hu Y. Optimization Design of Tuned Mass Damper for Vibration Suppression of a Barge-Type Offshore Floating Wind Turbine[J]. Journal of Engineering for The Maritime Environment, 2017, 231(1): 302-315. |
