

目标跟踪就是运用雷达、红外等传感器得到目标的观测数据, 通过合适的滤波算法来对目标每一时刻的运动状态进行精确的估计和跟踪。卡尔曼滤波算法是一种经典的滤波算法, 是线性高斯系统中基于最小均方根误差准则对目标进行状态估计的最优滤波方法[1], 但实际中往往遇到的是非线性、非高斯系统。目前, 针对机动目标跟踪算法的研究大部分仍基于卡尔曼滤波器及其变种算法。在非线性系统的滤波中, 扩展卡尔曼滤波器(EKF)较为普遍, 但性能会随着非线性的增强而急速下降。为了解决这个问题, 无迹卡尔曼滤波(UKF)[2]被提出, 与EKF相比, UKF具有更高的滤波精度, 能够得到更精确的系统状态方差估计。然而, 二者并不适用于一般的非高斯分布模型。粒子滤波算法(PF)[3]用一组随机抽样的有相应权值的粒子群来表示后验概率密度, 因不受线性误差和高斯噪声的影响, 可以运用在任何状态转换模型或测量模型, 其应用价值较高。基本粒子滤波算法存在着粒子退化问题, 即经过几步迭代以后, 除了极少数粒子权值较大外, 其他粒子的权值由于较小可以忽略不计。减少粒子退化现象一般有2种方法, 一种就是选择好的重要密度函数, 另一种是使用重采样技术。目前存在多种重采样方法, 例如残差采样、最小方差采样、多项式采样等。由于基本粒子滤波算法用系统状态转移概率作为重要性密度函数, 没有利用最新观测信息, 所以产生的粒子样本集中在后验概率分布的尾部, 从而导致粒子选择没有目的性, 降低了粒子滤波的精度。因此, 为了增加粒子的有效性, 相关学者分别利用EKF或UKF作为粒子滤波的建议分布, 提出了EKPF或UPF[4]。除此之外的辅助粒子滤波器(auxiliary PF)[5]、高斯粒子滤波器(Gaussian PF)[6]、高斯加和粒子滤波器(Gaussian sum PF)[7]、PARZEN粒子滤波器[8]以及李良群在文献[9]中提出的迭代扩展卡尔曼粒子滤波器(IEKPF), 这些改进的粒子滤波算法相继被提出。
在机动目标跟踪系统中, 交互式多模型算法[10]通过马尔可夫转移概率在多个模型间进行切换, 因此能跟踪目标的任意机动, 所以在目标高度机动的情形下, 较其他算法有着很强的优势。但是其中各模型滤波算法通常采用卡尔曼滤波或扩展卡尔曼滤波算法, 这些滤波算法在非线性非高斯系统中其滤波性能将大大降低。为此, 大量学者对交互式多模型算法进行了广泛而深入研究。文献[11]中提出了交互式多模型粒子滤波算法, 将其应用于机动目标的跟踪。但标准粒子滤波算法未利用最新观测信息, 降低了滤波精度。针对此问题, 相关学者将EKPF及UPF与交互式多模型结合, 分别提出了IMM-EKPF及IMM-UPF算法, 与IMMPF相比, 滤波精度更高。Kirubarajan等[12]把交互多模型算法与概率数据关联滤波相结合从而提出了交互式多模型概率数据关联, 该算法主要运用在杂波环境中对单个机动目标的跟踪。但是非线性部分的线性化处理所引起的误差降低了算法的跟踪性能。为此, Morelande等在文献[13]中将粒子滤波与交互式多模型概率数据关联相结合, 提出了在杂波环境中基于粒子滤波的机动目标跟踪算法, 在低检测概率和高虚警环境下实现对单机动目标的精确跟踪。杨争斌等在文献[14]中针对单站无源定位以及机动跟踪的特点, 将改进的迭代卡尔曼滤波(IKF)与IMM结合, 提出基于迭代的IMM算法; 胡振涛等在文献[15]中给出了一种基于广义UT变换的粒子滤波算法, 并将其与交互式多模型结合, 提出了一种基于广义UT变换的交互式多模型粒子滤波算法。
对于非线性强弱程度不同的非线性系统, 混合卡尔曼粒子滤波算法(MKPF)的跟踪精度均优于其他几种滤波算法, 包括EKF、UKF、PF、UPF及IEKPF。因此, 为了进一步提高交互式多模型算法对于机动目标的跟踪精度, 本文将MKPF算法与交互式多模型相结合, 提出了改进的交互式多模型粒子滤波算法, 并对该算法在机动目标跟踪方面的性能加以仿真实验分析。然而, MKPF算法要求状态协方差阵始终保持正定, 对于复杂系统往往无法满足要求, 针对此问题, 本文采用基于状态协方差阵对角相似分解的MKPF算法, 降低了该算法对状态协方差阵正定性的要求。在粒子滤波以及改进粒子滤波算法与交互式多模型相结合的过程中, 根据粒子产生的先后及交互输出方式的不同, 可以有3种不同组合方式, 为此, 本文通过仿真实验, 分析了不同组合方式对跟踪精度的影响。
1 交互式多模型机动目标跟踪算法交互式多模型算法利用多个运动模型的相互组合对机动目标进行跟踪, 通过采用模型集来描述目标系统的运动模型, 其中每个模型与系统中特定的一个模型相匹配, 然后基于每一个模型的并行滤波, 利用每个滤波器的残差以及各模型的先验概率密度计算当前时刻与模型匹配的模型概率, 最终的状态估计就是各个模型滤波器估计值的概率加权融合, 该算法流程如图 1所示。

|
| 图 1 交互式多模型算法流程 |
假定有r个模型:

|
(1) |
式中, Wj(k)是均值为零、协方差矩阵为Qj的白噪声序列。
测量模型为:

|
(2) |
由图 1可知, IMM算法主要包括4个步骤:①输入交互; ②各模型滤波; ③模型概率更新; ④交互输出。具体内容如下:
1) 输入交互
|
(3) |
式中
|
2) 各模型滤波
根据输入交互及k时刻的量测数据Zk, 对各个模型进行卡尔曼滤波。
预测:
|
(4) |
卡尔曼滤波增益:

|
(5) |
状态估计更新:

|
(6) |
状态协方差阵更新:

|
(7) |
式中, 
3) 模型概率更新
模型概率更新方程为:

|
(8) |
式中
|
4) 输出交互
|
(9) |
基于改进的交互式多模型粒子滤波算法将传统IMM算法的卡尔曼滤波器采用混合卡尔曼粒子滤波实现即交互多模型混合卡尔曼粒子滤波(IMM-MKPF)。下面重点介绍新算法中滤波的实现过程。根据粒子产生的先后及交互输出方式的不同, 可以有3种不同组合方式, 如图 2所示, 其中, j表示第j个粒子, 粒子总数为N。不同组合方式下, 该算法的跟踪精度会有所差异, 为此, 仿真实验中将对各种不同组合方式的性能进行分析。

|
| 图 2 基于改进的交互式多模型粒子滤波算法3种不同的组合方式 |
1) 混合卡尔曼粒子滤波的实现过程
MKPF算法采用EKF与UKF混合作为建议分布, 得到一种更接近真实分布的近似表达方式, 因充分利用了量测信息, 因而能有效提高状态估计精度。在时刻k, 首先用UKF更新粒子, 获得相应的状态估计值



假设k-1时刻的状态及相应协方差的估计分别为

(1) 计算Sigma点及其权值:
|
(10) |
|
(11) |
式中,λ=α2(nx+κ)-nx是一个尺度调节因子, nx表示状态向量的维数, α决定了Sigma点的散布程度, 通常取很小的正值。κ是次级尺度调节因子, 通常设为0, β用来描述X的分布信息(高斯分布时β取2), Wj(m)表示均值的权值, Wj(c)表示协方差的权值。
(2) 计算Sigma点通过系统模型与测量模型的传播结果:

|
(12) |
|
(13) |

|
(14) |
(3) 计算预测测量值的均值

|
(15) |

|
(16) |
式中,

|
(17) |

|
(18) |
用EKF执行粒子更新的主要过程如下:
(4) 计算预测状态及协方差
|
(19) |

|
(20) |
(5) 求取卡尔曼增益:
|
(21) |
(6) 修正预测量得到最终的状态估计:

|
(22) |

|
(23) |
式中,Q为系统噪声的协方差阵, R为测量噪声的协方差, Fki和Gki以及Hki和Uki分别为系统模型和测量模型的雅可比矩阵, 最终求得的

2) 状态协方差阵对角相似分解的IMM-MKPF算法
由(10)式可知, 在获取Sigma点时, 需要对状态协方差阵进行分解, 通常采用Cholesky分解, 然而, 进行Cholesky分解时矩阵必须为正定矩阵, 对于强非线性复杂系统, 状态估计的协方差阵无法始终保持正定, 因此, 本文中我们采用状态协方差阵对角相似分解的IMM-MKPF算法, 降低了对状态协方差阵正定性的要求。
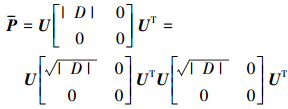
由矩阵对角相似分解定理可知:如果矩阵A为是对称半正定矩阵, 则A可以分解为

|
(24) |
式中,U为A的与特征值对应的完备正交特征向量组成的正交矩阵, Σ=diag(λ1, λ2, λ3, …λr), λr(i=1, 2, …r)为矩阵A的全部非零特征值。
由上述定理, 可对状态协方差阵P作同样处理, 由P的对角相似分解进行Sigma点采样。则基于对角相似分解的UKPF算法中的(3)式如下:

|
(25) |
当P在非半正定的情况下, 算法为:

|
(26) |
式中,D=diag(λ1, λ2, λ3, …λn), λi(i=1, 2, …n)为P的特征值。
当状态协方差半正定时, 采用对角相似分解与采用Cholesky分解所获得的Sigma点相同; 当状态方差阵出现非半正定情形时, Sigma点的方差阵为:
|
(27) |
尽管P≠P, 但λi(P)=|λi(P)|, 能够保证Sigma点偏差在实数范围内, 进而降低了算法对于状态协方差为正定性的要求。
3 仿真实验为了验证本文所述算法的有效性及分析不同组合方式对跟踪精度的影响, 进行了一组仿真实验。用两坐标雷达的量测数据实现对于X-Y平面上机动目标的跟踪。假设雷达传感器位于坐标原点, 目标运动状态演化和量测演化方程如下:

|
(28) |

|
(29) |
式中, 


|
w1, w2表示均值为零, 标准差为Q=0.2I2的系统过程噪声, I2表示2维单位矩阵; 量测噪声vk服从均值为零, 标准差为diag([Rd, Rθ]), Rd为30 m, 表示雷达的测距误差, Rθ为0.3°, 表示雷达的测角误差。
仿真实验中, 设目标状态初值X0为[200, 10, 130, 5]T, 蒙特卡洛仿真次数M为50次, 仿真步数为100步, 粒子数为100, 以位置估计均方根误差(RMSEPosi)作为目标跟踪性能的比较依据, 表达式如下:

|
(30) |
式中,

仿真中对比了IMM-EKPF、IMM-UPF及本文中所提出的IMM-MKPF 3种算法在目标跟踪中的状态估计效果; 并依据第2节中所述的混合卡尔曼粒子滤波与交互式多模型算法3种不同的组合方式, 分析了不同组合方式对跟踪精度的影响。仿真实验结果如图 3所示; 不同组合方式下3种算法位置估计的均方根误差均值如表 1所示。

|
| 图 3 不同组合方式下各算法位置估计的RMSE对比 |
| 目标跟踪算法 | 位置估计的均方根误差均值 | ||
| 组合方式1 | 组合方式2 | 组合方式3 | |
| IMM-EPF | 7.486 3 | 10.514 1 | 8.336 7 |
| IMM-UPF | 6.438 5 | 9.084 2 | 7.195 8 |
| IMM-MKPF | 4.729 7 | 6.407 2 | 6.763 9 |
从图 3及表 1中的仿真结果可以看出:对于高维非线性系统的状态估计, IMM-UPF的跟踪精度优于IMM-EKPF, 而本文所提出的IMM-MKPF算法的跟踪精度均高于IMM-EKPF及IMM-UPF; 基于IMM与PF相结合的3种不同组合框架, 不同的组合方式下, 滤波精度有所差异, 从仿真结果来看, 组合方式1的精度更高, 组合方式3的跟踪精度优于组合方式2。
4 结论交互式多模型算法在目标高度机动的情形下较其他模型有着很强的优势, 但强干扰环境下, 当运动目标的机动性较大时, 目标模型具有较强的非线性、非高斯特性, 传统的交互式多模型算法的跟踪精度大大下降。粒子滤波作为一种非线性、非高斯系统滤波方法, 不受线性化误差和高斯噪声假定的限制, 适用于任何状态转换或测量模型, 被广泛应用于复杂环境下机动目标跟踪中, 因此, 二者的结合能够进一步提高机动目标跟踪精度。然而, 粒子滤波存在着“粒子退化”问题, 解决该问题的主要方法包括重采样及建议分布优选。本文从建议分布角度出发, 将UKF及EKF混合, 作为建议分布, 充分利用了当前量测信息, 与常规算法相比, 具有更高的跟踪精度; 另外, 本文研究了交互式多模型与粒子滤波算法的3种不同结合方式, 由仿真实验及分析可知, 组合方式1更优。
| [1] | Andrews S, Hans A. Bridging the Ensemble Kalman Particle Filters:The Adaptive Gaussian Mixture Filter[J]. Computational Geosciences, 2011, 15(2): 293-305. DOI:10.1007/s10596-010-9207-1 |
| [2] | Li W, Leung H, Zhou Yifeng. Space-Time Registration of Radar and ESM Using Unscented Kalman Filter[J]. IEEE Trans on Aerospace and Electronic System, 2004, 40(3): 824-836. DOI:10.1109/TAES.2004.1337457 |
| [3] | Arulam Palam M S, Maskell S, Cordon N, et al. A Tutorial on Particle Filters for Online Nonlinearnon-Gaussian Bayesian Tracking Processing[J]. IEEE Trans on Signal Processing, 2002, 50(2): 174-188. DOI:10.1109/78.978374 |
| [4] | Chang Dahchung, Fang Mengwei. Bearing-Only Maneuvering Mobile Tracking with Nonlinear Filtering Algorithms in Wireless Sensor Networks[J]. IEEE Systems Journal, 2014, 8(1): 160-170. DOI:10.1109/JSYST.2013.2260641 |
| [5] | Kotecha Jayesh H. Gaussian Particle Filtering[J]. IEEE Trans on Signal Processing, 2003, 51(10): 2592-2601. DOI:10.1109/TSP.2003.816758 |
| [6] | Jayesh H. Gaussian Sum Particle Filtering[J]. IEEE Trans on Signal Processing, 2003, 51(10): 2602-2611. DOI:10.1109/TSP.2003.816754 |
| [7] | Lehn Schiler T. Parzen Particle Filters[C]//Proceedings of International Conference on Acoustics, Speech, and Signal Processing, 2004: 781-784 |
| [8] |
王法胜, 赵清杰. 一种用于解决非线性滤波问题的新型粒子滤波算法[J]. 计算机学报, 2008, 31(2): 346-352.
Wang Fasheng, Zhao Qingjie. A New Particle Filter for Nonlinear Filtering Problems[J]. Chinese Journal of Computers, 2008, 31(2): 346-352. (in Chinese) |
| [9] | Li Liangqun, Ji Hongbing, Luo Junhui. The Iterated Extended Kalman Particle Filter[C]//IEEE International Symposium on Communications and Information Technology, 2005: 1213-1216 |
| [10] | Manor E, Averbuch A, Bar-Shalom Y, et al. Interacting Multiple Model Methods in Target Tracking:a Survey[J]. IEEE Trans on Aerospace and Electronic Systems, 1998, 34(1): 103-123. DOI:10.1109/7.640267 |
| [11] | Boers Y, Driessen J N. Interacting Multiple Model Particle Filter[J]. IEEE Proceedings——Radar Sonar Navigation, 2003, 150(5): 344-349. DOI:10.1049/ip-rsn:20030741 |
| [12] | Kirubarajan T, Bar-Shalom Y, Blair W D, et al. IMMPDAF for Radar Management and Tracking Benchmark with ECN[J]. IEEE Trans on Aerospace and Electronic Systems, 1998, 34(4): 1115-1133. DOI:10.1109/7.722696 |
| [13] | Morelande M R, Challa S. Manoeuvring Target Tracking in Clutter Using Particle Filters[J]. IEEE Trans on Aerospace and Electronic Systems, 2005, 41(1): 252-270. DOI:10.1109/TAES.2005.1413760 |
| [14] |
杨争斌, 郭福成, 周一宇. 迭代机动目标被动单站跟踪算法[J]. 宇航学报, 2008, 29(1): 304-310.
Yang Zhengbin, Guo Fucheng, Zhou Yiyu. Iterated Algorithm for Maneuvering Target Tracking by a Single Passive Observer[J]. Journal of Astronautics, 2008, 29(1): 304-310. (in Chinese) |
| [15] |
胡振涛, 潘泉, 杨峰. 基于广义变换的交互式多模型粒子滤波算法[J]. 电子学报, 2010, 38(6): 1443-1448.
Hu Zhentao, Pan Quan, Yang Feng. Interacting Multiple Model Particle Filtering Algorithm Based on Generalized Unscented Transformation[J]. Acta Electronica Sinica, 2010, 38(6): 1443-1448. (in Chinese) |
