

无线传感器网络通过一定区域内部署的大量具有通信、感测和计算能力的传感器节点, 来实现对特定区域的监测[1]。传感器网络的研究始于20世纪90年代末期, 经过近二十年的蓬勃发展, 已经广泛应用于国防军事、智能楼宇、环境监测等领域。作为一个正在发展的新兴技术, 水下无线传感器阵列网络(underwater wireless sensor array network, UWSAN)是陆地传感器网络概念向水下应用的延伸[2]。
根据估计参量的不同, 最常用于无线传感器网络的定位算法可以分为基于到达时间(time of arrival, TOA)、基于到达时间差(time difference of arrival, TDOA)和基于波达方向(direction of arrival, DOA)的定位方法等。TOA方法对信号发射和接收端的时间同步要求苛刻, 实际应用存在困难, 而TDOA方法和DOA方法对收发端的时间同步要求不高。利用TDOA方法对三维目标定位需要4个节点, 系统可以获得较高的定位精度, 但在有些情况下会存在定位模糊[3]。而利用DOA方法对目标定位需2个节点, 技术难度小, 但其缺点是定位误差较大[4]。这2种定位系统有各自的特点,但也有共同的不足。一方面, 网络的节点数目少, 获得的信息有限; 另一方面, 没有综合利用时域、空域信息, 而只考虑了某方面的测量信息。随着微处理器性能及网络技术的不断提高, 节点间通信已不再成为制约无源定位技术发展的瓶颈, 因此多节点网络定位将成为一个重要的研究方向。不仅如此, 为了获得更高的定位精度, 还需要利用可能获得的信号到达时间差和波达方向等各种信息。文献[4]给出一种测向测时差无源定位算法, 但它只能用于两节点定位网络, 并且存在定位模糊问题。根据以上分析, 本文以多节点UWSAN为平台, 提出融合时域TDOA信息和空域DOA信息的三维目标定位算法, 有效提高了UWSAN的系统可靠性和目标定位精度。
1 单模态信息目标定位算法本节将介绍UWSAN节点随机布放情况下, 基于TDOA和基于DOA的单模态信息目标定位算法。在前人工作基础上, 分别将四节点TDOA方法和两节点DOA方法推广到网络存在冗余节点的情形, 为提出多节点TDOA-DOA融合定位算法奠定基础。
1.1 基于TDOA的定位模型文献[5-6]研究了基于TDOA的目标定位方法。其中, 文献[5]采用两步最小二乘定位算法来提高定位精度, 但仅限于二维平面上的目标, 对经常遇到的三维目标定位问题不适用; 文献[6]用双直角三角形阵实现声目标的三维定位, 但是在实际应用中, 节点往往通过飞机或舰船随机布放, 难以保证网络特定的几何结构; 文献[3]实现了四节点随机布放情况下的水下三维目标定位, 但对网络节点数目多于4个的情况没有考虑。下面推导网络存在冗余节点情况下, 基于TDOA的三维目标定位算法。
假设水下无线传感器阵列网络由N个声呐节点组成, 节点pi(i=1, 2, …, N)随机分布在一定的海洋区域内。pi的坐标已知, 分别记作p1(x1, y1, z1), p2(x2, y2, z2), …, pN(xN, yN, zN); 目标p位于水下任意一点, 坐标记作p(x, y, z)。传感器网络节点与目标的几何关系如图 1所示。

|
| 图 1 水下目标与网络节点的几何关系图 |
记目标p到第i个节点pi的距离为Ri, 则由图 1所示几何关系以及空间两点间距离公式得

|
(1) |
声呐节点均采用被动工作方式, 若以p1接收到信号的时刻为参考时刻, 则可通过广义互相关等方法估计节点pi相对于参考节点p1的时延差τ1i。海洋中的声速记为c, 则:Ri=R1+ΔR1i=R1+cτ1i。其中, ΔR1i表示Ri与R1的距离差值。
通过以上分析, 可得方程组
|
(2) |
从(2)式可以看出, 如果知道声呐的位置坐标(xi, yi, zi)和各个时延差τ1i, 在已知水下声速的情况下, 就可以计算出水下目标的三维坐标(x, y, z)。声呐节点的位置可以通过GPS定位得到, 而时延差可以通过算法估计。这些信息经无线电通讯链回传到船载电子系统进行解算, 便能得到水下目标的空间位置。对上式加减消元并化简, 得到方程组(2)的矩阵形式

|
(3) |
式中:

|
海洋环境中, 受海浪的影响传感器节点pi(xi, yi, zi)容易发生漂移; 另外, 由于噪声等因素影响, 时延差估值τ1i往往存在误差, 这些都会间接导致式中ΔR1i不等于真实值。此时(3)式表示的方程组成为矛盾方程组, 其精确解w不存在, 但可以寻求它在某种意义下的近似解。以残差的平方和最小为优化判据, 用公式表达为

|
(4) |
即求解向量


|
(5) |
根据(5)式便得到多节点情况下, 基于TDOA方法的水下目标在最小二乘意义下的坐标
在无线传感器阵列网络中, 角度信息同时延信息一样是最基本的观测量, 多站测向交叉定位是常用的定位方法。文献[7]给出两节点情况下对三维目标定位的基本方法; 文献[8]分析了节点数量对定位误差的影响, 得出节点数量增加在一定程度上将提高定位精度的结论; 文献[9]尝试将最小二乘方法用于多节点测向定位算法, 但和文献[8]一样, 该方法只适用于二维平面上的目标。本节推导网络存在冗余节点情况下, 基于DOA的三维目标定位算法。
图 2所示为基于角度信息的目标定位方法的三维空间结构图。实际应用中, 各阵列节点首先通过DOA估计分别获得目标的空间方位(方位角和俯仰角)信息, 然后将结果传送到融合中心, 再利用基于角度的目标定位方法确定目标的位置。

|
| 图 2 基于DOA的目标定位方法的空间结构图 |
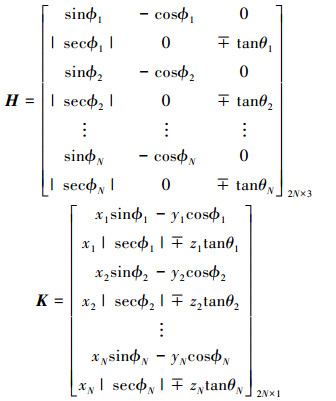
图 2中共有N个阵列节点, 若节点pi估计出目标的方位角和俯仰角分别为ϕi和θi, 则目标角度信息和阵列节点坐标之间满足如下的几何关系:

|
(6) |
|
(7) |
经过变形, 以上两式等价于如下的线性方程组:
|
(8) |
或者
|
(9) |
将方程组(8)和(9)表示成矩阵形式

|
(10) |
式中,v=[x y z]T
|
当方位角ϕi或俯仰角θi的估计值存在误差时, 目标位置在最小二乘意义下的解为

|
(11) |
由(11)式便可得到多节点情况下, 基于DOA方法的水下目标在最小二乘意义下的坐标
信息融合就是把来自不同信息源的数据(信息)加以分析和综合, 以完成所需的估计与决策的处理过程。经过第1节的推导, 分别得到基于TDOA和基于DOA的多节点网络三维目标定位算法。分析(3)式与(10)式表示的方程组, 因为矩阵w与v的待解元素不完全相同, 导致对两式的合并造成困难。可以对(10)式进行推广, 得到它的同解方程组, 写成矩阵形式

|
(12) |
式中:
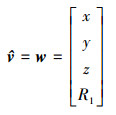
|
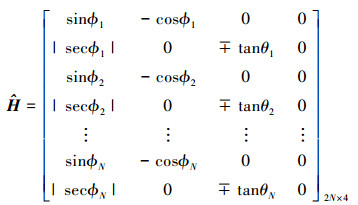
|
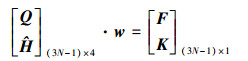
将(3)式与(12)式表示的方程组联立, 写成矩阵形式
|
(13) |
应用最小二乘原理, 得到该矩阵方程的正规方程组为

|
(14) |
且(13)式在最小二乘意义下的解为

|
(15) |
至此, 我们推导得到了融合TDOA和DOA 2种模态信息的三维目标定位算法。当网络节点的数目在2个或2个以上时, 该定位算法都是有效的。
3 数值仿真与分析定位精度是定位系统的重要技术指标。除系统误差外, 传感器节点漂移、时延估计误差、角度(方位角和俯仰角)估计误差是影响UWSAN定位精度的主要外部因素。下面进行计算机仿真,一方面验证所推导的多节点TDOA方法、DOA方法和融合算法的正确性, 另一方面比较多模态信息融合算法和单模态信息定位算法的定位精度。以十节点网络为例, 不失一般性, 声呐节点的初始位置和目标位置随机分布在1 km×1 km的区域内, 节点全部位于海平面, 目标深度在水下300 m的范围内, 水中声速c为1 500 m/s。节点漂移量的单位是米, 时延及其误差的单位是毫秒, 角度及其误差的单位是度。
3.1 多模态融合算法和TDOA方法的比较算例1 节点随机漂移对定位的影响。进行20组实验, 并对每组1 000次实验的定位误差分别取均值。节点漂移量的均值为零, 标准差由最初的0.1以0.1为间隔递增到2, 图 3a)~图 3c)分别显示目标横坐标x、纵坐标y和深度z的定位误差。

|
| 图 3 节点随机漂移对定位的影响 |
算例2 时延估计误差对定位的影响。进行20组实验, 并对每组1 000次实验的定位误差分别取均值。时延误差的均值为零, 标准差由最初的0.01以0.01为间隔递增到0.2, 图 4a)~图 4c)分别显示目标横坐标x、纵坐标y和深度z的定位误差。

|
| 图 4 时延估计误差对定位的影响 |
从图 3和图 4可以看出, 无论是节点随机漂移还是时延估计存在误差的情况, 融合算法和TDOA方法对水下目标横坐标x的定位误差相近, 对纵坐标y的定位误差同样相近, 但是融合算法对目标深度z的定位误差要远小于TDOA定位算法, 且融合算法的深度定位误差随节点漂移量或时延估计误差的增加上升得很缓慢。
3.2 多模态融合算法和DOA方法的比较算例3 方位角估计误差对定位的影响。进行20组实验, 并对每组1 000次实验的定位误差分别取均值。方位角误差的均值为零, 标准差由最初的0.1以0.1为间隔递增到2, 图 5a)~图 5c)分别显示目标横坐标x、纵坐标y和深度z的定位误差。

|
| 图 5 方位角估计误差对定位的影响 |
算例4 俯仰角估计误差对定位的影响。进行20组实验, 并对每组1 000次实验的定位误差分别取均值。俯仰角误差的均值为零, 标准差由最初的0.1以0.1为间隔递增到2, 图 6a)~图 6c)分别显示目标横坐标x、纵坐标y和深度z的定位误差。

|
| 图 6 俯仰角估计误差对定位的影响 |
从图 5和图 6可以看出, 当角度估计存在误差时, 融合算法的定位误差小于DOA定位算法, 尤其是对水下目标横坐标x和纵坐标y的定位精度改善很大。另一方面, 对于单模态信息的DOA方法, 其定位误差随着角度估计误差的增大变化较明显, 也从侧面说明融合算法具有更好的稳定性。
4 结论本文以UWSAN为应用平台, 在推导多节点网络基于到达时间差(TDOA)定位和基于波达方向(DOA)定位的基础上, 提出融合时域TDOA信息和空域DOA信息的水下被动目标三维定位算法。当传感器网络存在节点漂移、时延估计和角度(方位角和俯仰角)估计误差时, 分别比较了融合算法与TDOA方法、DOA方法的定位性能。仿真结果表明, 相对于单模态的定位算法, 多模态信息融合算法的定位误差更小, 性能更加稳定和可靠。这为提升UWSAN系统的抗干扰性、提高目标定位精度提供途径, 并对研究水下目标的跟踪与识别有重要的参考意义。
| [1] | Akyildiz I F, Su W, Sankarasubramaniam Y, et al. A Survey on Sensor Networks[J]. Communications Magazine IEEE, 2002, 40(8): 102-114. DOI:10.1109/MCOM.2002.1024422 |
| [2] | Heidemann J, Zorzi M. Underwater Sensor Networks:Applications, Advances and Challenges[J]. Philosophical Trans of the Royal Society A Mathematical Physical & Engineering Sciences, 2012, 370(1958): 158-175. |
| [3] |
金磊磊, 马艳. 任意四元阵的定位盲区讨论及误差影响[J]. 探测与控制学报, 2015, 37(2): 90-94.
Jin Leilei, Ma Yan. Discussion on Blind Area and Error Effect of Arbitrary Four-Element Array[J]. Journal of Detection & Control, 2015, 37(2): 90-94. (in Chinese) |
| [4] |
陈玲, 李少洪. 无源测向测时差定位算法研究[J]. 电子与信息学报, 2003, 25(6): 771-776.
Chen Ling, Li Shaohong. Study on Passive DOA Jointed TOA Location Algorithm[J]. Journal of Electronics and Information Technology, 2003, 25(6): 771-776. (in Chinese) |
| [5] |
谢胜东, 胡爱群, 黄毅, 等. 基于到达时间差的两步最小二乘定位算法[J]. 东南大学学报, 2013, 43(6): 1157-1161.
Xie Shengdong, Hu Aiqun, Huang Yi, et al. Two-Step Least Square Localization Algorithm Using Time Difference of Arrival Measurement[J]. Journal of Southeast University, 2013, 43(6): 1157-1161. DOI:10.3969/j.issn.1001-0505.2013.06.005 (in Chinese) |
| [6] |
顾晓辉, 王晓鸣. 用双直角三角形阵对声目标定位的研究[J]. 声学技术, 2003, 22(1): 44-47.
Gu Xiaohui, Wang Xiaoming. Location of Acoustic Target with Dual Right-Triangles Array[J]. Technical Acoustics, 2003, 22(1): 44-47. (in Chinese) |
| [7] | Sandersreed J N. Error Propagation in Two-Sensor Three-Dimensional Position Estimation[J]. Optical Engineering, 2001, 40(4): 627-636. DOI:10.1117/1.1353798 |
| [8] |
卢发兴, 高波, 邢昌风, 等. 测量站数量对多站测向交叉定位精度的影响[J]. 火力与指挥控制, 2011, 36(2): 69-72.
Lu Faxing, Gao Bo, Xing Changfeng, et al. The Influence of the Number of Measuring Participants on the Location Error in Multi-Station Bearing-Crossing Location[J]. Fire Control & Command Control, 2011, 36(2): 69-72. (in Chinese) |
| [9] |
徐济仁, 薛磊. 最小二乘方法用于多站测向定位的算法[J]. 电波科学学报, 2001, 16(2): 227-230.
Xu Jiren, Xue Lei. LS Algorithm Used in DF and Localization[J]. Chinese Journal of Radio Science, 2001, 16(2): 227-230. (in Chinese) |
