

自供电系统是一种非常有应用前景的电子部件, 其典型应用有微机电执行结构[1]、无线健康监测传感器[2-3]等。对于这些系统而言, 环境振动是一种十分有效的能量来源。自从冯卡门在1900年提出卡门涡街以后, 几十年来全世界的相关研究工作都集中在涡激振动(vortex induced vibration, VIV)对结构的破坏上, 研究合理的外形结构以减小、规避涡激振动对装置结构的破坏, 这对于建筑结构、海洋立管等尤为重要, 但是关于利用涡激振动来进行能源采集的研究则相对较少看到。
密歇根大学的Bernitsas教授在2005年设计了一种称为VIVACE(vortex induced vibration aquatic clean energy)新型的能源转换装置[4-5], 该装置利用弹性安装的圆柱在自由来流中的横向振动, 将流体动能转换为机械能, 进而转化为电能进行能量采集。该装置在流速为1.03 m/s, 圆柱直径为89.9 mm时, 输出功率可以达到98.2 W/m3, 并且可以通过级联布置成VIVACE工厂实现MW级的发电功率。基于Bernitsas提出的转换器, Vinod改进设计了一种叫做e-VIV(enhanced vortex induced vibration)的装置[6], 该装置采用竖直安置的圆柱体作为振动体, 不同的是PTO(power take off)装置采用直线电机, 避免了将圆柱直线往复运动转换为电机旋转运动过程中的效率损耗。他们的研究工作都是将钝头体的涡激振动, 通过机械传动装置带动电机的转动进行振动能源采集。
弗吉尼亚理工大学的Abdelkefi在2013年率先将压电材料引入了涡激振动研究, 他仿真分析了具有压电弹性的圆柱在涡激振动时的发电性能, 在负载电阻为400 kΩ时其输出功率能达到10 μW[7]。他还设计了一种将压电片贴在柔性悬臂梁固支端两侧的装置, 并将圆柱体附着在悬臂梁的自由端, 利用自由端圆柱的涡激振动带动悬臂梁的弯曲运动。由于悬臂梁固支端的形变小于自由端, 该装置适用于来流速度更大的气流, 该装置在空气流速为1.2 m/s, 负载电阻为1 MΩ时, 输出功率为2 mW。纽约市立大学的Akaydin也将涡激振动和压电材料结合起来提出了一种类似的压电能源转换装置[8], 他将压电悬臂梁单独放置于圆柱尾流区下游, 利用作用在压电材料上的泄涡压力进行能量采集, 该装置在流速为11 m/s, 负载电阻为10 MΩ时, 输出功率能达到4 μW。
为了利用钝头体的涡激振动, 以上的研究工作都是设计了专门的试验装置进行能源采集, 然而将涡激振动和压电悬臂梁与现有水下设备相结合, 应用于水下设备或者驻留平台的研究却很少看到。本文将涡激振动和压电材料与锚链装置相结合, 提出了一种新型锚链结构的概念设计, 建立了该结构的发电性能模型, 研究了不同参数对其发电性能的影响。
1 新型锚链发电装置及其数学模型该锚链结构在形式上类似于Pobering和Schwesinger提出的类鱼系统Eel[9]。锚链上罩有钝头体导流罩用于诱发漩涡, 1条旗帜状的压电材料悬臂梁附着在钝头体上, 漩涡在钝头体的尾流区以卡门涡街的形态脱落, 位于其尾流区的悬臂梁在漩涡的作用下发生弯曲。压电悬臂梁由3层构成:上下2层为PVDF(polyvinylidene fluoride, 聚偏氟乙烯)压电材料, 中间为柔性衬底层。本文提出的新型锚链装置的概念示意图如图 1所示。

|
| 图 1 新型锚链装置概念图 |
锚链装置可以简化为两部分:第一部分为钝头体的涡激振动, 第二部分为PVDF压电悬臂梁在其尾流中的弯曲变形。压电悬臂梁在钝头体尾流场中的弯曲运动是典型的双向流固耦合问题, 且悬臂梁的弯曲变形相对于其整体尺寸较小, 使得对其直接进行CFD仿真更加困难, 因此首先建立系统的数学模型对其进行仿真和分析是十分有意义的。
虽然压电悬臂梁与钝头体诱发的漩涡之间的相互作用十分复杂, 但是梁在尾流区的弯曲对钝头体的运动影响很小, 更多的是梁对尾流区漩涡发展的影响。为了简便起见, 将悬臂梁对钝头体的横向运动的影响直接计入悬臂梁弯曲的机械阻尼中, 因此整个系统的数学模型可以由钝头体的运动模型与梁的弯曲模型2部分组成, 这2个部分可以分开进行建模。
锚链装置的结构示意图如图 2所示。图中, D为钝头体的外径, dc为锚链的直径, hm为衬底层的厚度, hp为PVDF压电层厚度, L为梁的长度。

|
| 图 2 锚链装置结构示意图 |
雷诺数在3×105~1.5×106之间时, 钝头体两侧漩涡非对称地周期性脱落, 导致钝头体在来流中发生振动。Sarpkaya[10]在研究涡激振动的升力时首先提出了升力分解模型, 它将升力分解为惯性力和阻尼力, 升力系数表述为
|
(1) |
式中, Cml和Cdl分别为固定钝头体流体力系数的惯性力分量和黏滞力分量, T为横向振动周期, ω为横向振动频率, 
钝头体在来流作用下发生运动时, 速度矢量方向并不是总与自由来流速度方向一致, 设θ为x轴(来流方向)和钝头体瞬时速度之间的夹角, 则作用在钝头体上的力是升力分量和阻力分量在y轴方向上的合力。
通常情况下, 


|
(2) |
式中, 
钝头体和PVDF压电悬臂梁“固支端”固连, 则悬臂梁的固连端与钝头体一起运动。由于悬臂梁和锚链的限制, 钝头体的旋转运动相对于其平移运动可以忽略不计[11], 则其运动形态与钝头体保持一致, 即:wb(t)=y(t)。
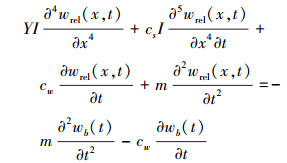
悬臂梁相对于其固连端的弯曲运动的控制方程为[12]:

|
(3) |
式中, wrel(t)为悬臂梁相对于其固连段的弯曲位移, M(x, t)为梁的内部弯曲弯矩, csI为结构黏弹性导致的复合梁横截面的等效阻尼项, (cs为等效阻尼应变比系数, I为复合梁横截面的等效惯性矩), cw为水中阻尼系数, m为梁的单位长度质量。
设定PVDF压电层和电极覆盖整个梁, 梁弯曲形成的电场可以用PVDF压电层的厚度2hp表示, 则梁的内部弯矩为:

|
(4) |
将方程(4)带入方程(3)可以得到机电耦合的运动控制方程:
|
(5) |
梁弯曲变形的边界条件为:
|
(6) |
压电本构方程给出了衬底层与PVDF压电层的应力/应变与电场之间的关系[13]:
|
(7) |
PVDF悬臂梁载荷两端的电压为v(t)=RLi(t), 则其可以表示为[14]:

|
(8) |
式中, hpc为PVDF层与梁中性层之间的距离, 其可以用梁的挠度表示。
2 数值仿真 2.1 锚链装置几何参数为了便于同以往圆柱绕流的研究关联, 锚链装置的导流罩采用圆柱, 所采用圆柱的尺寸与孙飞所做研究[15]采用相同的尺寸。来流速度为0.5 m/s, 雷诺数为5×104, 此时在钝头体尾部自由剪切层中漩涡稳定形成并周期性脱落, 升力系数和阻力系数都趋于稳定。
塑性压电材料PVDF由于其良好的压电性能, 对较小的力就可以产生相对可观的变形, 将其附着在聚脂薄膜(mylar)两侧形成压电悬臂梁。装置的基本几何尺寸参数如表 1所示。
本文中计算仿真采用2D模型, 因此悬臂梁的宽度设定为单位宽度, 即b=1。但是若要获取更加精确的结果, 3D模型仿真是后续必须要进行的工作。
悬臂梁各层材料(PVDF和聚酯薄膜)的材料属性如表 2所示, 其中下标p和m分别代表压电(PVDF)层和衬底(mylar)层。
对于给定的几何参数, 固定圆柱的惯性力分量Cml为0.324, 黏滞力分量Cdl为1.25[16]。使用四级四阶龙格库塔算法求解方程(2), 可以得到圆柱的横向振动, 如图 3所示。

|
| 图 3 钝头体的横向运动 |
通过仿真得到的横向约化位移幅值为0.4, 即横向振幅最大可以达到0.4D, 横向约化速度变化幅值为1.2, 由力分解模型得到的钝头体运动结果与孙飞和王军雷实验测得的结果[15-16]及Khalak、Williamson的仿真结果[17]都十分吻合, 说明求解钝头体横向振动的力分解模型可以很好地预测圆柱体的横向振动, 所得结果是可信的。
2.3 压电悬臂梁变形分析梁的“固支端”与钝头体固连, 因此其运动形态与钝头体的横向运动一致。由力分解模型确定悬臂梁固连端的运动后, 结合提出的固连端和自由端的边界条件, 采用差分法求解方程(5)可以得到悬臂梁的弯曲变形。一个漩涡脱落周期内, 梁的典型弯曲形态如图 4所示。由图 4可知:

|
| 图 4 一个漩涡脱落周期内梁的弯曲形态 |
1) 整个悬臂梁周期性弯曲, 由于梁的弯曲运动是各阶振动模态的叠加, 因此梁上各点振动幅值不是随着其距梁固连端的距离线性增长。
2) 在梁长约4/5L处形成了一个明显的驻点, 此处梁上质点振幅始终接近于0。
3) 压电悬臂梁的非连续弯曲对于悬臂梁产生电压, 将机械能转化为电能十分重要。
压电悬臂梁指定位置(1/4L、1/2L、3/4L、L)的弯曲挠度变化如图 5所示。从图 5可知:

|
| 图 5 梁上指定位置弯曲运动 |
1) 悬臂梁自由端振动幅值为0.03 m, 而中点的幅值约为其三分之二, 自由端振幅十分接近于钝头体的横向振动振幅, 即当钝头体回到静止位置时, 梁自由端运动至最大振幅处, 这是由于钝头体振动在梁上传播的滞后性造成的。
2) 梁上各点的振动周期均相同, 和钝头体尾部漩涡脱落周期保持一致, 说明整个梁处于二阶弯曲模态或同一振动模态对梁上各点的弯曲起主导作用, 但是驻点左右两侧梁振动相位相差180°。
3) 若要观测梁的不同振动模态, 需要研究梁的长度L和压电层与衬底层的厚度hp, hm等参数对其弯曲的影响。
2.4 功率分析压电悬臂梁的弯曲在PVDF压电层产生电荷, 电荷在电极上的位移产生电流, 随着悬臂梁的周期性弯曲, 周期性变化的电压在电极两端形成。悬臂梁产生的电压和功率可以由方程(8)求解得到, 得到的电压和输出功率分别如图 6所示:

|
| 图 6 悬臂梁的输出电压和输出功率(RL=1 MΩ) |
由图 6可知, 压电悬臂梁电极两侧产生了准正弦电压, 其幅值为5.4 V。当电阻载荷为1 MΩ时, 产生的功率平均值为1.4 μW, 峰值可以达到2.9 μW。产生的电能可以用于驻留平台微型电子器件的供电, 尤其可以用于驻留平台中处于休眠状态的电子器件的供电, 也可以通过多个锚链系统、多个压电悬臂梁的级联以增大输出功率。
2.4.1 梁长对发电性能的影响利用对装置建立的发电性能数学模型, 在负载电荷分别为10 kΩ, 50 kΩ, 100 kΩ, 500 kΩ时分析不同梁长对装置发电性能的影响, 结果如图 7所示。

|
| 图 7 不同梁长和不同负载电阻对发电性能的影响 |
从图 7分析可知, 所有梁长对发电性能的变化具有相似的变化趋势:
1) 在所选载荷下, 平均输出功率都在梁长L/D≈3时达到最大, 在负载电阻为500 kΩ时平均输出功率达到最大值, 约为6 μW。
2) 负载载荷越大, 当梁长L/D>3后, 平均输出功率减小越迅速; 负载电阻为500 kΩ, 当L/D>4时平均输出功率已降至小于电阻为100 kΩ时的值。
2.4.2 负载电阻对发电性能的影响在梁长L/D依次为2, 3, 4, 5, 6, 7时, 依次对于给定梁长, 取不同负载电阻研究其发电性能的影响, 结果如图 8所示。

|
| 图 8 不同负载电阻对发电性能的影响 |
从图 8可以看出, 不同梁长情况下负载电阻对平均输出功率的影响有相似的变化趋势。
1) 平均输出功率在最佳负载点处达到最大, 最佳载荷大约为200 kΩ; 且随着梁长的增加, 最佳负载略有减小(如图 8虚线所示)。
2) 当负载电阻小于最佳载荷时, 平均输出功率随着负载的增加而增大; 当负载电阻大于最佳载荷时, 平均输出功率随着负载电阻的增大而减小, 且梁长越长平均输出功率减小越快。
3) 当负载电阻达到10 MΩ, 平均输出功率都已很小。
3 结论本文提出了一种新型的、可用于发电的锚链装置的概念设计, 分别建立了钝头体的横向振动模型和悬臂梁的弯曲变形模型, 得到了装置的发电性能数学模型, 计算了PVDF压电层两端电极产生的电压。可以得到以下结论:
1) 由模型得到的仿真结果与孙飞、王军雷实验测得的数据及Khalak、Williamson的仿真结果十分吻合, 说明模型仿真结果是可信的。
2) 在梁长为2D时, 压电悬臂梁上各点都处于同一振动模态, 驻点两侧振动相位差为180°。
3) 负载电阻恒定时, 随着梁长的增大, 平均输出功率也逐渐增大, 当梁长为3D时平均输出功率达到最大, 之后随着梁长的增加其开始减小。
4) 在钝头体结构参数不变的情况下, 梁长、负载电阻的增加使得平均输出功率增大; 在达到最大值后, 随着负载电阻的继续增加, 平均输出功率开始减小, 且负载电阻越大, 平均输出功率减小越快, 最佳载荷约为200kΩ, 且最佳载荷随着梁长的增加略有减小。
5) 在梁长为3D, 负载电阻为200 kΩ时, 平均最大输出功率得到最大值, 接近于7.3 μW。
钝头体与压电悬臂梁固连后, 悬臂梁会对钝头体的运动产生干扰, 因此钝头体的运动与悬臂梁的弯曲本质上是一个耦合运动问题, 仅将该影响反映在圆柱运动机械阻尼里并不十分准确, 在之后的研究中需要引入耦合模型; 为了使系统处于最优工作状态, 需要设计适当的机械结构使得压电悬臂梁始终处于顺流向方向, 从而使其在任意方向的来流作用下都能在钝头体的尾流区弯曲变形。
| [1] | Muralt P. Ferroelectric Thin Films for Micro-Sensors and Actuators:a Review[J]. Journal of Micromechanics and Microengineering, 2000, 10(2): 136-146. DOI:10.1088/0960-1317/10/2/307 |
| [2] | Renno J M, Daqaq M F, Inman D J. On the Optimal Energy Harvesting from a Vibration Source[J]. Journal of Sound and Vibration, 2009, 320(1): 386-405. |
| [3] | Roundy S, Wright P K. A Piezoelectric Vibration Based Generator for Wireless Electronics[J]. Smart Materials and Structures, 2004, 13(5): 1131-1142. DOI:10.1088/0964-1726/13/5/018 |
| [4] | Bernitsas M M, Raghavan K, Ben-Simon Y, et al. VIVACE(Vortex Induced Vibration for Aquatic Clean Energy):A New Concept in Generation of Clean and Renewable Energy from Fluid Flow[J]. Journal of Offshore Mechanics and Arctic Engineering-Transactions of the ASME, 2008, 130(4): 619-636. |
| [5] | Bernitsas M M, Ben-Simon Y, Raghavan K, et al. The VIVACE Converter:Model Tests at High Damping and Reynolds Number Around 105[J]. Journal of Offshore Mechanics and Arctic Engineering, 2009, 131(1): 403-414. |
| [6] | Vinod A, Kashyap A, Banerjee A, et al. Augmenting Energy Extraction from Vortex Induced Vibration Using Strips of Roughness/Thickness Combinations[C]//Marine Energy Technical Symposium, Washington D C, 2013 |
| [7] | Mehmood A, Abdelkefi A, Hajj M R, et al. Piezoelectric Energy Harvesting from Vortex-Induced Vibrations of Circular Cylinder[J]. Journal of Sound and Vibration, 2013, 332(19): 4656-4667. DOI:10.1016/j.jsv.2013.03.033 |
| [8] | Akaydin H D, Elvin N, Andreopoulos Y. Energy Harvesting from Highly Unsteady Fluid Flows Using Piezoelectric Materials[J]. Journal of Intelligent Material Systems and Structures, 2010, 21(13): 1263-1278. DOI:10.1177/1045389X10366317 |
| [9] | Pobering S, Schwesinger N. A Novel Hydropower Harvesting Device[C]//International Conference on MEMS, NANO and Smart Sysems, Alberta, 2004 |
| [10] | Sarpkaya T. Fluid Forces on Oscillating Cylinders[J]. NASA STI/Recon Technical Report A, 1978, 78(3): 275-290. |
| [11] | Weaver Jr W, Timoshenko S P, Young D H. Vibration Problems in Engineering[M]. John Wiley & Sons, 1990 |
| [12] | Erturk A, Inman D J. On Mechanical Modeling of Cantilevered Piezoelectric Vibration Energy Harvesters[J]. Journal of Intelligent Material Systems and Structures, 2008, 19(19): 1311-1325. |
| [13] | Meitzler A, Tiersten H F, Warner A W, et al. IEEE Standard on Piezoelectricity[M]. American National Standards Institute, 1987 |
| [14] | Erturk A, Inman D J. A Distributed Parameter Electromechanical Model for Cantilevered Piezoelectric Energy Harvesters[J]. Journal of Vibration and Acoustics, 2008, 130(4): 1257-1261. |
| [15] |
孙飞. 涡激振动潮流能转换装置获能原理研究[D]. 青岛: 中国海洋大学, 2013 Sun Fei. Study on Mechanism of VIV in Tidal Current Energy Conversion Device[D]. Qingdao, Ocean University of China, 2013(in Chinese) |
| [16] |
王军雷. 基于流机电多物理场耦合下涡激振动能量收集模型及特性[D]. 重庆: 重庆大学, 2014 Wang Junlei. Modeling and Characteristics of the Vortex-Induced Vibration Piezoelectric Energy Harvesting Based on the Aero-Electromechanical Multi-Physics Field Coupling[D]. Chongqing, Chongqing University, 2014(in Chinese) |
| [17] | Khalak A, Williamson C H K, Khalak A, Williamson C H K. Motions, Forces and Mode Transitions in Vortex-Induced Vibrations at Low Mass-Damping[J]. Journal of Fluids & Structures, 1999, 13(7/8): 813-851. |
