

在传统的拦截弹制导控制系统设计中, 通常对制导环节和姿态控制环节分离设计。但是分离设计所忽略的环节之间的耦合效应可能会降低拦截的精度。特别对末制导且目标具有高速、大机动的拦截场景而言, 这样的耦合效应尤为强烈[1-2]。
为了弥补分离设计的不足, 有许多文献对制导和姿态组成的整体系统开展了设计, 这些设计被统称为制导控制一体化(integrated guidance and control, IGC)设计。IGC设计可以有效提高拦截的精度, 但是, IGC设计面临着2个关键性的问题[3], 其一, IGC系统是典型的高阶系统, 有较高的相对阶。其二, IGC系统中存在着由目标机动、不确定气动参数等带来的强不确定干扰。文献[4]基于反馈线性化开展了IGC设计。文献[5-7]通过将IGC模型简化为线性化模型, 然后基于优化方法进行最优IGC设计。以上方法解决了IGC设计中高相对阶的问题, 但是它们都假设模型精确已知, 因此它们无法解决强不确定干扰的关键问题。
反演控制(backstepping control, BC)不仅也能解决IGC设计的高相对阶问题[8-9]。而且, 通过将BC方法与鲁棒控制方法结合, 还能同时解决IGC设计中的强不确定干扰问题。文献[10-13]分别基于模糊自适应方法[10]、自适应滑模方法[11]以及干扰观测器[12-13]来改进传统的BC方法, 设计了对干扰具有鲁棒性的IGC算法。但是, BC方法需要对每个中间状态设计虚拟控制量, 因此前述基于BC的IGC算法都假设导弹全部状态可测。而实际上, 部分导弹状态可能是难以测量的。首先, 由于体积以及成本等的限制, 许多拦截弹的导引头无法直接测量视线角速率[14]。其次, 对于飞行速度很高的高速拦截弹而言, 测量导弹的攻角也是十分困难的[15]。因此, 对于这样一类视线角速率与攻角都无法测量的高速拦截弹而言, 前述基于BC的IGC算法无法在实际工程中实现。
为了解决上述问题, 本文采用线性扩张状态观测器(linear extended state observer, LESO)改进现有基于BC的IGC算法。首先, 基于LESO不仅能观测未知状态也能观测未知干扰的特点[16], 设计LESO同时观测未知中间状态与干扰。随后, 将观测的中间状态用来设计BC中的虚拟控制量, 从而避免使用视线角速率与攻角。同时, 利用估计的干扰在BC中进行补偿, 由此所设计的IGC算法还能对干扰具有鲁棒性。基于Lyapunov稳定性理论证明了整个LESO-BC混合闭环系统的稳定性。最后, 在仿真中与文献[10]中需要全部状态信息的BC方法进行对比。结果表明, 在不使用视线角速率与攻角的情况下, 本文所设计的IGC算法依旧能够保证足够的拦截精度。
1 问题描述弹-目关系见图 1, M与T分别为拦截弹与目标。(xM, yM)与(xT, yT)分别为导弹与目标的位置。相对运动方程如下

|
(1) |

|
| 图 1 弹-目相对关系 |
式中, R与Ṙ分别为弹目相对距离及其变化率, q与
|
(2) |
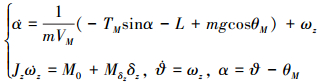
式中, α是攻角, m为质量, TM是拦截弹的推力, L是拦截弹的升力, ωz是拦截弹的角速率, δz为舵偏角, ϑ为俯仰角。Mδz为舵偏引起的俯仰力矩。M0是由攻角、马赫数等引起的力矩, M0可以近似为M0=Mαα+Mωzωz。升力等具体表达式为

|
(3) |
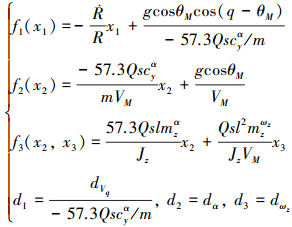
mzδz, mzα以及mzωz分别为δz, α以及ωz所对应的俯仰力矩系数。cyα以及cyδz为α与δz对应的升力系数。l为参考长度, Q为动压, s为特征面积。Jz为转动惯量。
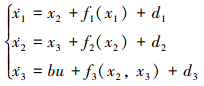
参考文献[10], 定义b=57.3Qslmzδz/Jz, 
|
(4) |
式中
|
(5) |
式中,dVq为目标法向机动加速度, dα与dωz分别为攻角通道与角速率通道的干扰及未建模动态, g为重力加速度。
正如前言所述, 针对高速拦截弹而言,
假设1
本文的目的:根据文献[10], IGC设计的目标就是通过合理设计u使得系统(4)中的x1→0。根据现有文献[10-13]中的基于BC的IGC算法, 需要对系统(4)中的x2以及x3分别设计虚拟控制量x2d#与x3d#, 其中x2d#将包含x1, 而x3d#将包含x2。但是当假设1成立, 即
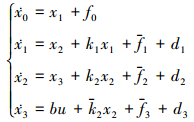
定义可直接测量的辅助状态变量x0=-Rq/(57.3Qscyα/m), 结合系统(4), 可得
|
(6) |
式中相应的系数及非线性项定义如下
|
(7) |
对于系统(6)而言, 由于
考虑到LESO不仅能够观测系统状态, 而且能够观测干扰[16], 因此可以考虑基于LESO来观测未知的状态与干扰。随后, 用估计的状态来设计BC中的虚拟控制量, 同时用估计的干扰来补偿, 从而提高IGC算法的鲁棒性。
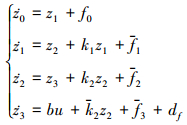
但是, 由于x1与x2是未知的, 所以无法采用现有的LESO直接估计非匹配干扰d1与d2, 为此, 考虑将非匹配干扰与未知状态进行合成, 定义z0=x0, z1=x1, z2=x2+d1, 

|
(8) |
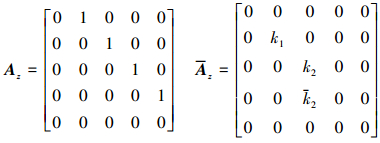
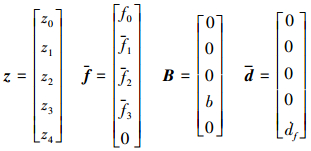
显然, 对于系统(8)来说, 如果中间状态zi(i=1, 2, 3)都是已知的, 则整个系统转换为匹配不确定系统。同时, IGC的设计任务转换为设计u使得z1→0。为了设计LESO, 首先, 扩展匹配干扰df为z4=df, 则有

|
(9) |
式中
|
|
为了观测的稳定性, 必须假设:
假设2 假设存在正常数dmax使得不确定干扰满足‖d‖≤dmax。
假设3 假设k1, k2以及k2都是有界的, 存在正常数k1max, k2max以及k3max使得:‖k1‖≤k1max, ‖k2‖≤k2max, ‖k3‖≤k3max。
注1 k2与k3是气动系数, 因此k2与k3必然有界。而对于k1=Ṙ/R来说, 由于拦截弹与目标的速度都是有限的, 因此Ṙ有界。同时, 当目标与拦截弹足够接近时, 导引头将停止工作, 同时整个IGC系统也将停止工作, 因此我们只需考虑R>R的情况(R>0, 由导引头决定), 所以k1也是有界的。关于k1有界的详细分析可以参考文献[11]。
定理1 针对系统(8), 设计如下的LESO同时观测未知状态zi(i=1, 2, 3)以及干扰df

|
(10) |
式中
|
(11) |
式中,ω0>0。如果观测增益ω0足够大, 则估计误差向量

|
(12) |
证明 定义误差


|
(13) |
式中
|
(14) |
定义Lyapunov函数

|
(15) |
将(13)式带入(15)式, 整理后得
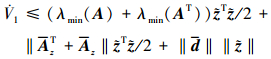
|
(16) |
式中,λmax(A)表示A的最大特征根。考虑假设3成立, 可知存在常数azmax>0使得‖AzT+Az‖/2≤azmax。同时考虑到假设2成立以及λmin(A)=λmin(AT)=-ω0, 可得

|
(17) |
选取足够大的ω0使得ω0-azmax>0。随后可知当




|
(18) |
同时

|
(19) |
证明完毕。
3 反演控制器设计在获取了估计状态
Step 1 定义误差s1=z1, 设计虚拟控制量

|
(20) |
Step 2 定义误差s2=z2-z2c, 设计虚拟控制量
|
(21) |
Step 3 定义误差s3=z3-z3c, 设计

|
(22) |
在以上设计中, σi(i=1, 2, 3), τj(j=2, 3)为相应的控制与滤波增益。
假设3 假设


定理2 对于IGC系统(8), 选择合理的控制与滤波参数, 则在控制量(22)的作用下, 跟踪误差si(i=1, 2, 3)是一致最终有界的, 且可以通过调节参数使得收敛界任意小。
证明 定义滤波误差为e2=z2c-z2d, e3=z3c-z3d, 由(20)式与(21)式可知

|
(23) |

|
(24) |
分别对s1, s2以及s3求导, 然后带入z2d, z3d以及u的表达式, 整理后得

|
(25) |

|
(26) |

|
(27) |
取Lyapunov函数V2=sTs/2+eTe/2, 其中s=[s1 s2 s3]T, e=[e1 e2 e3]T。为方便表述, 将V2分为V21=sTs/2与V22=eTe/2。对V21求导, 带入(25)式、(26)式与(27)式得

|
(28) |
对V22求导, 同时带入(23)式以及(24)式得

|
(29) |
联立(28)式与(29)式, 同时根据young不等式、假设2以及假设3可得
|
(30) |
考虑选取足够大的控制增益σi, i=1, 2, 3, 以及足够小的滤波增益τj, j=2, 3, 使得
|
(31) |
式中正常数ϕδ与ϕτ表征期望的收敛速率。令

|
(32) |
考虑估计误差始终满足(18)式, 可得

|
(33) |
式中,ϕm=min{ϕδ, ϕτ}, ρ=ϕzzmax2+ϕ2d2。从(33)式可知, V2受限于如下的不等式

|
(34) |
从(34)式知, 误差si始终处于有界紧集内。特别的, 当ϕm≫ρ, 可以保证收敛界足够小, 从而当t→∞时, si→0。证明完毕。
注2 观察所设计的虚拟控制量z2d, z3d以及(22)式中的真实控制量u, 可知它们都没有使用无法测量的中间状态zi(i=1, 2, 3)。从而避免了使用无法测量的
拦截弹及目标的初始位置及速度分别为xM(0)=yM(0)=0, xT(0)=4 000 m, yT(0)=0, VM=1 200 m/s, VT=800 m/s。拦截弹与目标的初始弹道倾角为θM(0)=0°, θT(0)=3°。拦截弹的初始姿态为α(0)=0°, ωz(0)=0°。仿真中取文献[10]中的气动系数:

|
同时, 考虑目标法向机动加速度及各种不确定性干扰分别为dVq=10cos(u/3)+15 m/s2, dα=5sin(u/2)+3°/s, dωz=cos(u/5)+0.5°/s2。
为了验证本文所提出的方法的有效性, 将本文的基于部分状态反馈方法的BC方法(partial state feedback-based back-stepping control, PSF-BC)(22)式与文献[10]中基于全部状态反馈方法的BC方法(full state feedback-based back-stepping control, FSF-BC)进行对比。PSF-BC所需参数取为σ1=3, σ2=3, σ3=6, ω0=10, τ2=τ3=0.1。FSF-BC的控制方法参数与文献[10]中相同。

|
| 图 2 弹目相对距离 |

|
| 图 3 视线法向相对速度变化 |

|
| 图 4 舵偏角变化 |

|
| 图 5 拦截弹与目标运动轨迹 |

|
| 图 6 观测器的估计误差 |
从图 2可以看出FSF-BC与PSF-BC方法都能确保脱靶量小于0.1m, 这就意味这2种IGC算法都能控制拦截弹以足够的精度命中目标。从图 3还能看出2种方法都能控制法向相对速度收敛到零附近。图 4给出了2种方法的舵偏角。图 5给出了2种方法下拦截弹与目标的运动轨迹。图 6给出了PSF-BC中LESO的观测误差, 可见各误差都能收敛到零。
总之, FSF-BC与PSF-BC都取得了很高的拦截精度。但是, PSF-BC无需视线角速率与攻角, 因此相比需要全状态的FSF-BC而言, 本文所提出的PSF-BC算法拓展了现有基于BC的IGC算法的工程适用对象。
5 结论本文提出一种新型IGC算法来解决具有不可测状态的高速拦截弹的IGC设计问题。通过在BC虚拟控制量中使用LESO估计的不可测状态, 避免使用高速拦截弹中难以测量的攻角与视线角速率。同时在控制量中加入LESO估计的不确定干扰, 使得所设计的IGC算法对干扰具有鲁棒性。仿真表明, 在不使用视线角速率与攻角, 且存在不确定干扰的情况下, 本文方法依旧能够保证足够的拦截精度。由于无需使用攻角与视线角速率, 因此所设计的算法拓展了现有IGC算法的工程适用对象。
| [1] | Maital L, Tal S, Shual G. Linear Quadratic Integrated Vs Separated Autopilot-Guidance Design[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(6): 1722-1730. DOI:10.2514/1.61363 |
| [2] | Yan H, Ji Hb. Integrated Guidance and Control for Dual-Control Missiles Based on Small Gain Theorem[J]. Automatica, 2012, 48(10): 2686-92. DOI:10.1016/j.automatica.2012.06.084 |
| [3] |
薛文超, 黄朝东, 黄一. 飞行制导控制一体化设计方法综述[J]. 控制理论与应用, 2013, 30(12): 1511-1520.
Xue Wenchao, Huang Chaodong, Huang Yi. Design Methods for the Integrated Guidance and Control System[J]. Control Theory & Applications, 2013, 30(12): 1511-1520. (in Chinese) |
| [4] |
尹永鑫, 杨明, 王子才. 导弹三维制导控制一体化研究[J]. 电机与控制学报, 2010, 14(3): 87-91.
Yin Yongxin, Yang Ming, Wang Zicai. Three-Dimensiional Guidance and Control for Missile[J]. Electric Machines and Control, 2010, 14(3): 87-91. (in Chinese) |
| [5] | Menon P K, Ohlmeyer E J. Integrated Design of Agile Missile Guidance and Control Systems[C]//Proceedings of the 7th IEEE Mediterranean Conference, 1999:28-30 |
| [6] | Xin M, Balakrishnan S H, Ohlmeyer E J. Integrated Guidance and Control of Missiles with θ-D Method[J]. IEEE Trans on Control Systems Technology, 2006, 14(6): 981-992. DOI:10.1109/TCST.2006.876903 |
| [7] | Palumbo N F, Jackson T D. Integrated Missile Guidance and Control:A State Dependent Riccati Differential Equation Approach[C]//Proceedings of the 1999 IEEE International Conference on Control Applications, Kohala Coast, 1999:243-248 |
| [8] | Yip P P, Hedrick J K. Adaptive Dynamic Surface Control:A Simplified Algorithm for Adaptive Backstepting Control of Nonlinear Systems[J]. International Journal of Control, 1998, 71(5): 959-979. DOI:10.1080/002071798221650 |
| [9] | Zhang T P, Ge S S. Adaptive Dynamic Surface Control of Nonlinear Systems with Unknown Dead Zone in Pure Feedback Form[J]. Automatica, 2008, 44(7): 1895-1903. DOI:10.1016/j.automatica.2007.11.025 |
| [10] | Ran Maopeng, Wang Qing, Hou Delong, Dong Chaoyang. Backstepping Design of Missile Guidance and Control Based on Adaptive Fuzzy Sliding Mode Control[J]. Chinese Journal of Aeronautics, 2014, 27(3): 634-642. DOI:10.1016/j.cja.2014.04.007 |
| [11] | Hou Mingzhe, Liang Xiaoling, Duan Guangren. Adaptive Block Dynamic Surface Control for Integrated Missile Guidance and Autopilot[J]. Chinese Journal of Aeronautics, 2013, 26(3): 741-750. DOI:10.1016/j.cja.2013.04.035 |
| [12] | Shao Xingling, Wang Honglun. Back-Stepping Active Disturbance Rejection Control Design for Integrated Missile Guidance and Control System Via Reduced-Order ESO[J]. ISA Transactions, 2015, 57: 10-22. DOI:10.1016/j.isatra.2015.02.013 |
| [13] |
董朝阳, 程昊宇, 王青. 基于自抗扰的反演滑模制导控制一体化设计[J]. 系统工程与电子技术, 2015, 37(7): 1604-1610.
Dong Chaoyang, Cheng Haoyu, Wang Qing. Backstepping Sliding Mode Control for Integrated Guidamce and Control Design Based on Active disturbance Rejection[J]. Systems Engineering and Electronics, 2015, 37(7): 1604-1610. DOI:10.3969/j.issn.1001-506X.2015.07.21 (in Chinese) |
| [14] | Yan Han, Ji Haibo. Guidance Laws Based on Input-To-State Stability and High-Gain Observer[J]. IEEE Trans on Aerospace and Electronic Systems, 2012, 48(3): 2518-2529. DOI:10.1109/TAES.2012.6237606 |
| [15] | Liu Zhen, Tan Xiangmin, Yuan Ruyi. Immersion and Invariance-Based Output Feedback Control of Air-Breathing Hypersonic Vehicles[J]. IEEE Trans on Automation Science and Engineering, 2016, 13(1): 394-402. DOI:10.1109/TASE.2015.2493002 |
| [16] | Han J. From PID to Active Disturbance Rejection Control[J]. IEEE Trans on Ind Electron, 2009, 56(3): 900-906. DOI:10.1109/TIE.2008.2011621 |
