

高超声速飞行器再入过程中飞行速度快, 飞行空域广, 动力学参数变化剧烈, 各通道间耦合严重, 且飞行过程中存在诸多不确定性, 因此, 必须针对飞行过程中的不确定因素, 为高超声速飞行器设计强鲁棒的控制系统, 以求其在复杂的飞行条件下仍能够具有满意的飞行性能和飞行品质[1]。近年来, 滑模控制方法由于其设计简单, 鲁棒性强, 在飞行器控制领域得到了广泛应用[2]。
一般来说, 滑模对于含有匹配不确定性的系统, 具有良好的鲁棒性[3]。在高超声速飞行器姿态控制设计中, 由于未建模误差、外部风干扰和飞行器自身参数变化等因素的作用[4], 使得这些不确定性均不满足匹配条件, 因此飞行器姿态控制系统就成为一个含非匹配干扰的控制对象。为了抑制非匹配不确定性对姿态控制系统的影响, 学者们提出了3类控制方法。
第一类解决方法是将整个飞行器姿态控制作为一个全耦合系统[5], 通过对角占优的方法来设计滑模控制, 但控制系统是高增益系统; 或者借助于其他控制方法, 如黎卡提方程[6]、模糊控制和神经网络[7]、自适应控制[8]等方法, 但这类方法的控制增益存在可解条件, 或可能提高了飞行器控制系统设计的复杂性或计算量。第二类是采用积分型滑模面进行滑模控制设计[9], 该类方法利用高控制增益使得系统状态到达滑模面并在干扰存在的情况下达到平衡点。相比第一类方法, 积分型滑模具有设计简单和良好的鲁棒性。但存在一个问题是对于非匹配的干扰, 需要干扰的一阶导数随时间趋向于零, 才能保证系统的性能特性[10]。而高超声速再入飞行器姿态控制系统并不能满足这一点[11]。第三类方法是采用反演法, 通过引入虚拟控制达到静态补偿的目的, 能够解决飞行器姿态系统中包含非匹配不确定项的控制问题。文献[12]采用自适应反演控制方法解决高超声速飞行器的再入控制问题。文献[13]采用指令滤波的方法设计了指令滤波反步控制器, 文献[14]在可重复使用运载器再入过程中使用双环反演控制设计姿态控制器。但由于飞行器为的高阶非线性系统, 当采用反演法进行控制器设计时, 不仅需要解决虚拟控制量的多次求导所导致的“微分膨胀”问题[15], 而且需要证明引入滤波器后整个系统的稳定性。
本文针对含有非匹配干扰的高超声速飞行器姿态控制问题, 不采用以上的控制方法, 提出含有干扰补偿的新型滑动模态, 利用姿态控制系统的参考模型, 设计具有鲁棒性能的飞行器姿态控制系统。不仅克服了积分滑模所要求非匹配干扰一阶导数随时间趋向于零的条件, 而且也避免了反演法中虚拟控制量的求导问题, 使得该控制系统对非匹配的不确定性具有良好的鲁棒性, 同时也借助于参考模型使控制系统具有良好的动态特性。
1 再入飞行器数学姿态模型本节研究高超声速飞行器再入大气层阶段的姿态控制问题。参考文献[14], 建立如下高超声速飞行器的姿态运动方程

|
(1) |
式中, α、β、γ分别为飞行器的攻角、侧滑角和倾侧角, ωx、ωy、ωz分别为飞行器旋转角速度, m、V、θ分别为飞行器的质量、速度和弹道倾角, Y、Z分别为作用在飞行器上的升力和侧向力, Mx、My、Mz分别为作用在飞行器上的气动力矩, Jx、Jy、Jz分别为飞行器的转动惯量。
为了便于姿态控制系统设计, 将气动力和气动力矩进行线性拟合, 将模型化为如下形式
|
(2) |
式中,x1=(α β γ)T, x2=(ωz ωy ωx)T为飞行器姿态状态量, u=(δz δy δx)T为控制输入, f1, f2为各通道之间的耦合项, 其具体形式和各项系数如下:
|
式中, q为动压, S为飞行器参考面积, l为飞行器参考长度, CY0为基本升力系数, CZβ为基本侧向力系数, Cxβ为基本滚转力矩系数, Cy0为基本俯仰力矩系数, Czβ为基本偏航力矩系数。C*δ*为各舵引起的力和力矩系数。Cxωx、Cyωy和分别为ωx、ωy和ωz引起的阻尼力矩系数。
2 非线性干扰观测器设计将飞行器内部参数摄动和外部干扰加入到飞行器姿态运动模型中, 得到
|
(3) |
式中,d1=f1+ΔA11x1+ΔA12x2d1, d2=f2+ΔA21x1+ΔA22x2+ΔBu+d2, ΔA11、ΔA12、ΔA21、ΔA22和ΔB为内部摄动矩阵, 表示飞行器内部参数未知摄动所引起的误差, d1、d2分别为外部未知干扰。
假设1 上述系统当中的干扰量连续, 且有界, 即满足

假设2 矩阵A12和矩阵B可逆, A11为对角阵, A11=diag(a11ii), i=1, 2, 3。
采用文献[16]中的非线性干扰观测器
|
(4) |
|
(5) |
式中, 



将观测误差定义如下

|
(6) |
式中, 





由(3)式和(4)式可得
|
(7) |
(7) 式两边同时减去

|
(8) |
同理, 由(3)式和(5)式可得
|
(9) |
将观测器的误差方程写成矩阵形式如下
|
(10) |
|
(11) |
因为矩阵D1为赫尔维兹矩阵, 所以观测误差渐近稳定。取如下形式的李雅普诺夫函数
|
(12) |
对(12)式求导可得

|
(13) |
因此, 经过足够长的一段时间, 观测误差收敛到一定范围内, 即‖ẽ1‖≤λ1, 其中λ1=-‖E1‖d12/λm, λm < 0为矩阵D1的最大特征值。
同理可知, 对于观测误差, 同样在经过足够长的一段时间, 有‖ẽ2‖≤λ2, 其中λ2=-‖E2‖d22/λn, 
为了得到参考角度指令的导数信息, 参考文献, 在理想情况下考虑以下参考模型
|
(14) |
式中, x1m=(αm βm γm)T为姿态角参考变量, x2m=(ωzm ωym ωxm)T为姿态角速度参考变量, x1c=(αc βc γc)T为姿态角指令。其中

|
|
式中, ξ为阻尼系数, T为时间常数。
注1 在角度指令一定的情况下, 可以根据再入过程中不同高度范围的飞行任务和需求, 调整阻尼系数ξ和时间常数T, 从而使得参考信号更真实。
在具有非匹配干扰误差的情况下, 基于干扰观测器的观测值设计一个新型滑模面如下

|
(15) |
式中, e1=x1-x1m为飞行器姿态角误差向量, e2=x2-x2m为飞行器姿态角速度误差向量, C=diag(cii), cii>0, i=1, 2, 3。
设计控制律的形式为

|
(16) |
式中, K1, K2为控制增益参数, K1=diag(k1ii), K2=diag(k2ii), k1ii>0, k2ii>0, i=1, 2, 3。
定理1 对于(3)式所描述的高超声速飞行器非线性系统, 当控制器参数k1, k2和cii满足

|
(17) |
式中,k1=min{k1ii}, k2=min{k2ii}, i=1, 2, 3, 系统状态能够在有限时间内到达滑模面, 并且在滑模面上系统状态有界稳定。
证 对于滑模面表达式求导可得
|
(18) |
将(16)式代入(18)式可得趋近律的形式为
|
(19) |
将(7)式代入(19)式可得

|
(20) |
将(6)式代入(20)式可得
|
(21) |
引入如下形式的李雅普诺夫函数

|
(22) |
对(22)式求导可得
|
(23) |
因此, 当条件k1+k2>d11+cλ1+a12λ2满足时, 系统状态在有限时间内达到滑模面。
注2 可以看出, c, λ1和λ2都可以设计的很小, 所以k1, k2取较小值, 在一定程度上削弱抖振。
当系统状态在滑模面上运动时, 即s=0, 有

|
(24) |
将(3)式和(14)式代入(24)式得

|
(25) |
结合观测器(6)式的可得

|
(26) |
因为矩阵(A11-C)为赫尔维兹矩阵, 所以系统状态误差渐近稳定。取如下形式的李雅普诺夫函数
|
(27) |
对(27)式求导可得
|
(28) |
因此, 经过足够长的一段时间, 系统状态的稳态误差收敛到一定范围内, 即
|
(29) |
式中,λ3为矩阵(A11-C)的最大特征值, 且λ3 < 0。
所以, 当系统满足cii>a11ii时, 系统状态在滑模面上有界稳定。定理1得证。
注3 系统观测误差的范围与矩阵D1的特征值和矩阵(A11-C)的特征值有关。矩阵(A11-C)的最大特征值越小, 系统状态的稳态误差越小; 矩阵D1的最大特征值的越小, 系统状态的稳态误差越小, 系统状态在滑模面上有界稳定的范围越小。
注4 由于包含符号函数, (16)式所描述的控制律并不连续, 故用饱和函数代替符号函数, 可得
|
(30) |
以高超声速再入飞行器为研究对象, 数学模型采用文献[5]中的结果, 对其姿态控制系统进行仿真研究, 通过跟踪方波信号来验证控制方法的有效性。
对单一特征点进行六自由度数值仿真计算, 在特征点处认为飞行器的高度、速度以及气动参数保持不变, 仅考虑姿态角的变化情况。选取特征点处飞行器的高度为20 km, 速度为1 950 m/s, 参考模型参数选取为ξ=0.9, T=0.3 s, 姿态角的初始值为[0° 2° 0°], 攻角跟踪8°的方波指令, 倾侧角跟踪10°的方波指令。干扰观测器的设计参数如下

|
控制器设计参数如下:
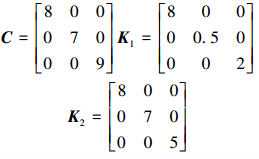
|
首先, 给出俯仰通道干扰观测器的观测误差曲线, 如图 1所示, 从图中可以看出所设计的干扰观测器能够实现对观测量的稳定跟踪, 从而有效地对控制量进行补偿。

|
| 图 1 俯仰通道观测误差曲线 |
其次, 为了说明本文所提到的控制方法的有效性, 这里将本文所设计的滑模控制方法与传统滑模相比较, 即在滑模面设计当中不考虑各种误差干扰的存在, 如图 2至图 3所示。

|
| 图 2 俯仰通道滑模面响应曲线 |

|
| 图 3 攻角响应曲线 |
图 2为两者滑模面的变化曲线, 图 3为两者攻角跟踪响应曲线, 显然从图中可以看出, 传统滑模方法的稳态误差较大。
最后, 分别在气动参数标称、正向拉偏和负向拉偏3种情况下, 对攻角, 侧滑角和倾侧角的控制响应效果进行仿真验证。图 4~图 6分别为飞行器攻角、侧滑角和倾侧角在气动参数标称和拉偏情况下的响应曲线。从图中可以看出, 由于采用干扰补偿的方法, 即使气动数据在正负拉偏情况下, 飞行器姿态角度在本文提出的姿态控制系统作用下, 具有相同的动态特性, 均能实现对方波指令的快速稳定跟踪。图 7为飞行器俯仰舵偏角的响应曲线, 可以看出, 舵偏角满足所要求的幅值限制, 削弱了变结构的抖振。

|
| 图 4 攻角响应曲线 |

|
| 图 5 侧滑角响应曲线 |

|
| 图 6 倾侧角响应曲线 |

|
| 图 7 俯仰舵偏角响应曲线 |
对于高超声速飞行器姿态控制系统在再入过程中出现的非匹配不确定性的控制问题, 采用非线性干扰观测器, 提出了一种新型含干扰补偿的滑模控制系统设计方法。即使飞行器姿态通道存在较大的非匹配干扰误差的情况下, 控制系统依然能够使得系统状态获得良好的稳定性。相比较于传统的滑模方法, 这种基于干扰观测器的设计方法不但保持了滑模原有的鲁棒性能, 并且在一定程度上削弱了抖振对系统状态的影响。最后的仿真结果验证了控制方法的有效性和鲁棒性。
| [1] |
黄琳, 段志胜, 杨剑影. 近空间高超声速飞行器对控制科学的挑战[J]. 控制理论与应用, 2011, 28(10): 1496-1506.
Huang Lin, Duan Zhisheng, Yang Jianying. Challenges of Control Science in Near Space Hypersonic Aircrafts[J]. Control Theory and Application, 2011, 28(10): 1496-1506. (in Chinese) |
| [2] | Feng Y, H an, F L, Yu X H. Chattering Free Full Order Sliding-Mode Control[J]. Automatica, 2014, 50(4): 1310-1314. DOI:10.1016/j.automatica.2014.01.004 |
| [3] | Yu X, Kaynak O. Sliding-Mode Control with Soft Computing:A Survey[J]. IEEE Trans on Industrial Electronics, 2009, 56(9): 3275-3285. DOI:10.1109/TIE.2009.2027531 |
| [4] | Chwa D, Choi J Y, Seo J H. Compensation of Actuator Dynamics in Nonlinear Missile Control[J]. IEEE Trans on Control Systems Technology, 2004, 12(4): 620-626. DOI:10.1109/TCST.2004.825046 |
| [5] |
周凤岐, 王延, 周军, 等. 高超声速飞行器耦合系统变结构控制设[J]. 宇航学报, 2011, 32(1): 66-71.
Zhou Fenqi, Wang Yan, Zhou Jun, et al. Design of Variable Structure Controller for Dynamic Vehicle Coupling System[J]. Journal of Astronautics, 2011, 32(1): 66-71. (in Chinese) |
| [6] | Prach A, Tekinalp O, Bernstein D. Nonlinear Aircraft Flight Control Using the Forward Propagating Riccati Equation[C]//AIAA Guidance, Navigation, and Control Conference, 2016:1383 https://arc.aiaa.org/doi/pdf/10.2514/6.2016-1383 |
| [7] | Wang S W, Yu D W, Yu D L. Compensation for Unmatched Uncertainty with Adaptive RBF Network[J]. International Journal of Engineering, Science and Technology, 2011, 3(6): 35-43. |
| [8] |
耿洁, 刘向东, 盛永智, 等. 飞行器再入段最优自适应积分滑模姿态控制[J]. 宇航学报, 2013, 34(9): 1215-1223.
Geng Jie, Liu Xiangdong, Sheng Yongzhi, et al. Optimal Adaptive Integral Sliding Mode Control for Reentry Vehicle Attitude[J]. Journal of Astronautics, 2013, 34(9): 1215-1223. (in Chinese) |
| [9] | Turner B J, Williams J R, Shtessel Y B, et al. Integral Sliding Mode Autopilot for Rocket Stabilization with Unmatched Disturbances[C]//AIAA Guidance, Navigation, and Control Conference, 2012:1-14 |
| [10] | Yang J, Li S H, Yu X H. Sliding-Mode Control for System Via a Disturbance Observer[J]. IEEE Trans on Industrial Electronics, 2013, 60(1): 160-169. DOI:10.1109/TIE.2012.2183841 |
| [11] |
黄喜元, 王青, 董朝阳. 基于Back-Stepping的高超声速飞行器鲁棒自适应控制[J]. 系统工程与电子技术, 2011, 33(6): 1321-1326.
Huang Xiyuan, Wang Qing, Dong Chaoyang. Robust Adaptive Control of Hypersonic Vehicles via Back-Stepping Method[J]. Systems Engineering and Electronics, 2011, 33(6): 1321-1326. (in Chinese) |
| [12] | Bialy B, Klotz J, J Willard Curtis, Dixon W. An Adaptive Back-Stepping Controller for a Hypersonic Air-Breathing Missile[R]. AIAA-2012-4468 |
| [13] | Wang Z, Wu Z, Du Y J. Robust Adaptive Back Stepping Control for Reentry Reusable Launch Vehicles[J]. Acta Astronautica, 2016, 126: 258-264. DOI:10.1016/j.actaastro.2016.04.015 |
| [14] |
刘晓东, 黄万伟, 禹春梅. 含扩张状态观测器的高超声速飞行器动态面姿态控制[J]. 宇航学报, 2015, 36(8): 916-922.
Liu Xiaodong, Huang Wanwei, Yu Chunmei. Dynamic Surface Attitude Control for Hypersonic Vehicle Containing Extended State Observer[J]. Journal of Astronautics, 2015, 36(8): 916-922. (in Chinese) |
| [15] |
刘宇超, 郭建国, 周军, 等. 基于新型快速Terminal滑模的高超声速飞行器姿态控制[J]. 航空学报, 2015, 36(7): 2372-2380.
Liu Yuchao, Guo Jianguo, Zhou Jun, et al. Hypersonic Vehicle Attitude Control Based on New Fast Terminal Sliding Mode[J]. Acta Aeronoutica et Astronautica Sinica, 2015, 36(7): 2372-2380. (in Chinese) |
| [16] | Ginoya D, Shendge P D, Phadke S B. Sliding Mode Control for Mismatched Uncertain Systems Using an Extended Disturbance Observer[J]. IEEE Trans on Industrial Electronics, 2014, 61(4): 1983-1992. DOI:10.1109/TIE.2013.2271597 |
