

2. 西北工业大学 航海学院, 陕西 西安 710072
为了对某一海域进行长期、隐蔽及低成本的侦查探测, 美国海军研究生院(NPS)最早提出了AUV着陆并驻留海底的概念[1]。
美国海军研究生院[2]研制的NPS AUV在变浮力系统和垂直推进器的辅助下整体坐落到海底。Ocean ExplorerⅡ[3]以传感器的支撑架和航行器壳体作为驻留海底的支撑系统。Sangekar[4-5]研制的AUV依靠支架支撑并驻留在海底。Discus Glider[6]直接整体坐落到海底。侯巍等[7-8]设计的AUV-VBS依靠航行器主体两侧的2个细长圆柱状压载水舱实现驻留海底。蛟龙号载人潜水器[9]可以利用支撑架坐落到海底。
上述国内外学者所研究的驻留方式在深远海岩石基海底能够很好地完成任务, 但是对于近海的港口、海岸等地方, 泥沙较多, 长期驻留时会出现被泥沙掩埋的情况。为此, 宋保维等[10]提出了2种AUV驻留方案, 一种为可伸缩液压支撑杆驻留方案, 另一种为锚泊驻留方案。其中支撑杆驻留机构适用于深远海岩石基海底, 而锚泊驻留方案适用于近海港口、海岸等地。
对于锚泊式AUV, 在航行器着陆过程中, 当航行器距离海底一定距离时将锚释放, 锚在重力的作用下下降, 在此过程中, 锚链将受到很大的冲击力, 为了保证锚链的安全性, 需要对锚链的冲击力进行研究。
1 研究对象本文以文献[10]中的锚泊式驻留航行器为研究对象, 其舱段组成示意图如图 1所示, 其主要参数如表 1所示。其是一种由潜艇发射管发射的AUV, 其能够经过低速远程航行之后到达需要探测的港口、海峡, 之后在低能耗的状态下长期驻留在海底对周围环境进行探测。文献[10]对锚泊式驻留水下航行器的工作过程、基本组成结构、驻留原理及关键技术等进行了详细介绍。

|
| 图 1 海底驻留AUV结构布局图 |
| 长度/mm | 7 000 | 直径/mm | 534.4 | |
| 航速/航程/(kn·km-1) | 5/500 | 航深/m | 300 | |
| 重量/kg | 1 438 | 重心位置/mm | 3 281 | |
| 前驻留机构位置/mm | 1 810 | 后驻留机构位置/mm | 5 555 | |
| 转动惯量Jxx/(kg·m2) | 289.3 | 转动惯量Jyy/(kg·m2) | 6 772 | |
| 转动惯量Jzz/(kg·m2) | 6 772 |
为了研究航行器着陆时锚链的冲击力, 首先要建立航行器的空间运动数学模型, 包括运动学模型和动力学模型[11]。在建立运动模型之前, 首先要确定坐标系。
2.1 坐标系本文涉及了如图 2所示的坐标系, 其主要包括地面坐标系Exeyeze、体坐标系Bxyz、速度坐标系Bx1y1z1, 坐标系及坐标系转换矩阵参考文献[12]。

|
| 图 2 坐标系示意图 |
航行器浮心的运动轨迹和旋转角速度用广义坐标形式可以表示为:

|
(1) |
式中, η=[rET, ΩT]T为地面坐标系中AUV浮心处的广义坐标矢量; rE=[xe, ye, ze]T为地面坐标系中AUV浮心位置矢量, Ω=[ψ, θ, ϕ]T为地面坐标系中的角速度。
ν=[vBT, ωT]T为体坐标系中航行器浮心处的广义速度矢量; vB=[vx, vy, vz]T为体坐标系中航行器的速度, ω=[ωx, ωy, ωz]T为角速度。
CEB是从体坐标系到地面坐标系的坐标转换矩阵:
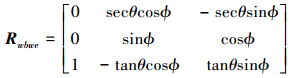
|
AUV空间运动的动力学方程为:

|
(2) |
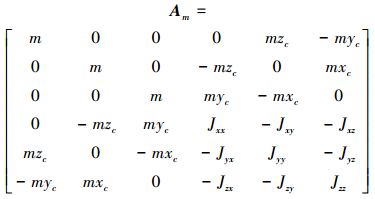
式中, Am为引入的质量及转动惯量矩阵, 其值为:
|
式中, m为航行器质量, xc、yc、zc为AUV重心在体坐标系中的坐标, Jij为转动惯量。
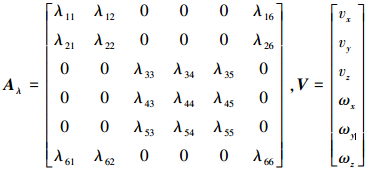
Aλ为附加质量λij组成的矩阵, V为广义速度矢量, 其值为:
|
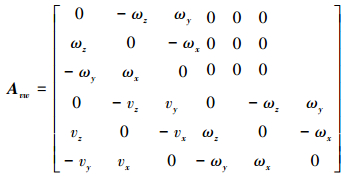
Avw为速度v及角速度ω组成的矩阵, 其值为:
|
AFM为合外力:

|
Fμα为黏性位置力、Fμω为黏性阻尼力、FBG为重力和浮力、FT为螺旋桨推力。
3 锚链冲击力分析模型在运动过程中, 考虑锚的重力、水的浮力、锚的附加质量、锚的流体动力、锚链的弹性力的作用, 建立的锚链冲击力分析模型如下。
3.1 锚链冲击力模型由于所研究锚链较短、直径较小、重量较低, 本文忽略锚链的水动力特性及重力的影响。
锚链的受力模型可以简化为弹簧模型, 根据胡克定律, 其受力模型如(3)式所示。

|
(3) |
式中, Fc为冲击力, 单位N; dx为变形量, 即锚链弹性形变量, 单位m; klan为锚链当量胡克系数, 单位N/m, 其计算模型如(4)式所示。

|
(4) |
式中, E为锚链材料的弹性模量; S为锚链横截面积; L为锚链长度。
根据(3)式和(4)式可得锚链冲击力模型为:

|
(5) |
锚的质量用ma来表示; 考虑到水的浮力时锚的负浮力为:
|
(6) |
锚的附加质量只与锚的形状有关, 不同的形状也对应着不同的附加质量。本文研究时根据经验取锚的附加质量为:λa=ma/10。
3.4 锚的流体动力锚在下落的过程中受到水的流体动力的作用。其计算模型如(7)式所示。

|
(7) |
式中, ρw为水的密度; va为锚的下落速度; Cxa锚的阻力系数, 本小节中取1.2;Sa为锚下落时计算阻力的参考面积。
4 锚链冲击力分析根据以上建立的航行器空间运动数学模型以及锚链冲击力分析模型, 基于MATLAB建立了航行器着陆过程锚链受力仿真模型。之后, 输入具体的参数即可对航行器的着陆过程中锚链冲击力进行仿真, 进而对锚链冲击力进行研究。航行器的流体动力参数采用文献[13]中用CFD方法计算得到的结果, 附加质量及部分阻尼系数采用[14]中的理论及经验公式进行计算。
在研究时, 首先研究了锚下落及AUV主体上浮时锚链的冲击力影响因素, 之后, 对AUV主体下落距离进行了分析。
为使分析问题简洁, 本文忽略浪和流的影响, 这样AUV的着陆运动就是在惯性速度、负浮力、流体动力作用下的垂直平面运动。
4.1 锚下落时锚链冲击力影响因素分析当航行器距离海底较远时, 锚布放后不能直接接触海底, 此时锚链会产生很大的冲击力。锚链所受的冲击力与锚的质量、锚链直径、锚链长度有关, 由于航行器主体质量比锚块质量大很多, 故将AUV抛锚的过程简化为锚链一端固定、另一端的锚从锚链固定点处释放的过程。
1) 锚质量的影响
研究锚的质量对冲击力的影响时, 取锚链直径为12 mm、锚链长度为2 m。锚的质量从5 kg变化到40 kg, 根据以上建立的锚链冲击力仿真系统, 得到锚链所受力及应力随锚质量的变化曲线如图 3所示。

|
| 图 3 力及应力随锚质量的变化曲线 |
从图 3可以看出, 锚链所受力及应力随锚的质量的增大而增大, 且近似成正比例关系。
2) 锚链直径的影响
研究锚链直径对冲击力的影响时, 取锚的质量为20 kg、锚链长度为2 m。锚链的直径从5 mm变化到20 mm, 经分析, 得到锚链所受力及应力随锚链直径的变化曲线如图 4所示。

|
| 图 4 力及应力随锚链直径变化曲线 |
从图 4可以看出, 锚链所受冲击力随着锚链直径的增大而增大, 且近似成正比例关系。锚链所受应力随着锚链直径的增大而减小且减速逐渐放缓。
3) 锚链长度的影响
研究锚链长度对冲击力的影响时, 取锚的质量为20 kg、锚链直径为12 mm。锚链的长度从0.4 m变化到3 m, 分析得到的锚链所受力及应力随锚链长度变化曲线如图 5所示。

|
| 图 5 力及应力随锚链长度变化曲线 |
从图 5可以看出, 锚链所受力及应力随锚链长度的增大而减小, 且减小的速度略微放缓。
4.2 AUV上浮时锚链冲击力影响因素分析当AUV离海底距离小于锚链长度时, 释放锚泊机构后锚直接布放在海底, 此时锚链没有受到冲击力, 但是AUV主体要在正浮力的作用下上浮, 当上浮到一定程度时锚链也会受到冲击力, 虽然此时AUV主体上浮速度很低, 但是由于其质量很大, 产生的锚链冲击力也较大, 为了保证锚链的安全性, 此时冲击力的大小也需要研究。
AUV上浮时锚链所受的冲击力与航行器的正浮力、锚链直径、锚链长度有关, 将上浮过程简化为锚链一端固定、另一端的AUV自由上浮的过程。上浮的过程中将航行器简化成一质点, 其参数与AUV的相同。由于AUV有两根锚链, 本文研究时只取一根锚链进行研究, 文中给出的锚链冲击力和应力也分别是单根锚链的力及应力。
1) AUV正浮力的影响
取锚链直径12 mm、长度2 m。AUV正浮力从5 kg变化到40 kg, 根据建立的锚链冲击力仿真系统, 经分析得到锚链所受力及应力随AUV正浮力的变化曲线如图 6所示。

|
| 图 6 锚链所受力及应力随AUV正浮力变化曲线C |
从图 6可以看出, 锚链所受力及应力随AUV正浮力的增大而增大, 且近似成正比例关系。
2) 锚链直径的影响
取AUV正浮力为30 kg、锚链长度为2 m。锚链的直径从5 mm变化到20 mm, 经分析, 得到锚链所受力及应力随直径的变化曲线如图 7所示。

|
| 图 7 锚链所受力及应力随锚链直径变化曲线 |
从图 7可以看出, 锚链所受力随着锚链直径的增大而增大, 且近似成正比例关系。锚链所受应力随着锚链直径的增大而减小且减小速度逐渐放缓。
3) 锚链长度的影响
取AUV正浮力为30 kg、锚链直径为12 mm。锚链长度从0.4 m变化到3 m, 经分析, 得到锚链所受力及应力随锚链长度的变化曲线如图 8所示。

|
| 图 8 锚链所受力及应力随锚链长度变化曲线 |
从图 8可以看出, 锚链所受力及应力随锚链长度的增大而减小, 且减小的速度略微放缓。
4.3 AUV下落距离影响因素分析当航行器距海底距离较远释放锚时, AUV主体和锚一起下落, 当锚下落到海底后, AUV主体仍有一定的下落速度, 所以其会继续下落。但由于AUV主体有正浮力, 其下落速度会越来越小, 直至减为0后再缓慢上浮。为了防止AUV下落时碰到海底, 需要对其下落距离进行研究。
AUV主体的下落距离与其正浮力、初始速度有关, 在研究时将主体简化成一质点, 其参数与AUV的相同。
1) 正浮力的影响
取AUV的初始下落速度为0.5 m/s, 通过仿真得到航行器主体下落距离随其正浮力的变化曲线如图 9所示。从图 9可以看出, 航行器下落的距离随着正浮力的增大而急剧减小, 在正浮力大于30kg后减小的趋势放缓很多。

|
| 图 9 下落距离随正浮力的变化曲线 |
2) 初始下落速度的影响
取AUV正浮力为30 kg, 经分析得到航行器的下落距离随初始下落速度的变化曲线如图 10所示。

|
| 图 10 下落距离随初始速度的变化曲线 |
从图 10可以看出, 航行器下落的距离随着AUV初始下落速度的增大而近似成正比例增大。
5 结论为了研究航行器着陆时锚链的冲击力, 本文首先建立了航行器的空间运动数学模型, 之后, 结合本航行器的特点, 利用弹性力学理论, 建立了锚链冲击力分析数学模型。在此基础上, 基于MATLAB建立了航行器着陆过程锚链受力仿真系统。基于建立的仿真系统, 研究了锚下落及AUV上浮时锚链的冲击力及影响因素, 得到了以下结论:
1) 冲击力:随着锚的质量、AUV主体正浮力、锚链直径的增大而增大, 且近似成正比例关系; 随着锚链长度的增大而减小, 且减小的速度略微放缓;
2) 应力:随着锚的质量、AUV主体正浮力的增大而增大, 且近似成正比例关系; 随着锚链直径、长度的增大而减小, 且减小的速度略微放缓;
之后, 根据建立的仿真系统, 研究了AUV主体下落距离影响因素, 得到了以下结论:
a) 正浮力的影响:下落距离随着正浮力的增大急剧减小, 在正浮力大于30 kg后减小趋势放缓;
b) 初始下落速度影响:下落距离随着AUV初始下落速度的增大而近似正比例增大。
本文研究内容为之后锚泊系统的设计、航行器的总体设计及改进提供理论基础。
| [1] | Healey A J, Marco D B. Experimental Verification of Mission Planning by Autonomous Mission Execution and Data Visualization Using the NPS AUVⅡ[C]//Proceedings of IEEE Oceanic Engineering Society Symposium on Autonomous Underwater Vehicles, 1992:65-72 |
| [2] | Riedel J S, Healey A J, Marco D B, et al. Design and Development of Low Cost Variable Buoyancy System for the Soft Grounding of Autonomous Underwater Vehicles[R]. Naval Postgraduate School, Monterey CA Center for Autonomous Underwater Vehicle Research, 2005 |
| [3] | Stewart A L G, Marc P O, Robert K C, et al. A Passive Sonar System Based on an Autonomous Underwater Vehicle[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 700-710. DOI:10.1109/48.972113 |
| [4] | Sangekar M N, Thornton B, Nakatani T, et al. Development of a Landing Algorithm for Autonomous Underwater Vehicles Using Laser Profiling[C]//OCEANS 2010:1-7 |
| [5] | Sangekar M, Thornton B, Ura T. Wide Area Seafloor Observation Using an Autonomous Landing Vehicle with Adaptive Resolution Capability[C]//OCEANS 2012:1-9 |
| [6] | Niewiadomska K, Jones C, Webb D. Design of a Mobile And Bottom Resting Autonomous Underwater Gliding Vehicle[C]//Proceedings of the 13th International Symposium on Unmanned Untethered Submersible Technology (UUST 2003), Durham New Hampshire, 2003 |
| [7] |
侯巍. 具有着陆坐底功能的水下自航行器系统控制与试验研究[D]. 天津: 天津大学, 2006 Hou Wei. System Control and Experiments on Autonomous Underwater Vehicle with Capabilities of Landing and Sitting-Bottom[D]. Tianjin, Tianjin University, 2006(in Chinese) http://cdmd.cnki.com.cn/article/cdmd-10056-2007078572.htm |
| [8] |
杜兵. 着陆式AUV动力学行为与控制策略研究[D]. 天津: 天津大学, 2012 Du Bing. Dynamic Behavior and Control Strategy of A Landing AUV[D]. Tianjin, Tianjin University, 2012(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10056-1013004790.htm |
| [9] |
胡勇, 沈允生, 谢俊元, 等. 深海载人潜水器的坐底分析[J]. 船舶力学, 2008, 12(4): 642-648.
Hu Yong, Shen Yunsheng, Xie Junyuan, et al. Landing Research on Deep-Sea Human Occupied Vehicle[J]. Journal of Ship Mechanics, 2008, 12(4): 642-648. (in Chinese) |
| [10] |
宋保维, 朱信尧, 曹永辉, 等. UUV海底定点停驻策略及其关键技术[J]. 鱼雷技术, 2010, 18(6): 401-405.
Song Baowei, Zhu Xinyao, Cao Yonghui, et al. Strategy and Key Technologies of UUV Parking on the Seabed[J]. Torpedo Technology, 2010, 18(6): 401-405. (in Chinese) |
| [11] | Kim D, Choi H S, Kim J Y, et al. Trajectory Generation and Sliding-Mode Controller Design of an Underwater Vehicle-Manipulator System with Redundancy[J]. International Journal of Precision Engineering and Manufacturing, 2015, 16(7): 1561-1570. DOI:10.1007/s12541-015-0206-y |
| [12] |
李天森. 鱼雷操纵性[M]. 2版. 北京: 国防工业出版社, 2007.
Li Tiansen. Torpedo maneuverability[M]. Second Edition. Beijing: National Defense Industry Press, 2007. (in Chinese) |
| [13] |
朱信尧, 宋保维, 单志雄, 等. UUV海底定点停驻受力特性及稳定性分析[J]. 西北工业大学学报, 2012, 30(1): 94-101.
Zhu Xinyao, Song Baowei, Shan Zhixiong, et al. Hydrodynamic Characteristics and Stability Analysis of UUV (Unmanned Underwater Vehicle) Parking on the Seabed[J]. Journal of Northwestern Polytechnical University, 2012, 30(1): 94-101. (in Chinese) |
| [14] |
张宇文. 鱼雷外形设计[M]. 西安: 西北工业大学出版社, 1998.
Zhang Yuwen. Torpedo Shape Design[M]. Xi'an: Northwestern Polytechnical University Press, 1998. (in Chinese) |
2. School of Marine Science and Technology, Northwestern Polytechnical University, Xi'an 710072, China
