

2. 中国航发湖南动力机械研究所, 湖南 株洲 412002
高速运转状态下,航空发动机转子系统不平衡会引起机组剧烈振动,而质量不平衡是其中最主要原因。特别是在目前转子正朝着超细长、超高速、大功率以及高推重比方向发展的趋势下,其振动问题显得更加突出。高速柔性转子在装机前都必须经过严格的平衡,确保安全稳定运行。
在过去的60多年里,人们针对各种应用场景和要求先后提出了多种柔性转子动平衡方法。尽管侧重点、适用范围不同,它们绝大部分可以归结为影响系数法和模态平衡法2大类以及二者结合的混合平衡法[1]。这两大基本平衡方法各具优势,同时在理论和实践发展过程中也暴露出了许多不足。首先,都是基于一系列选定转速下稳态运行的响应测试,然后通过多次起停车实现对不平衡量的识别来确定应该施加的校正量大小和方位。对于工程大型转子,这是非常费时费力的。其次,选定转速接近于临界转速,在临界转速附近长时间停留对转子很不利。此外,在临界区内振动相位对转速特别敏感,容易受到外界干扰,不易准确测量。后来,人们又提出了一些新的改进平衡方法。Hartog[2]首次提出了无需测量振动相位的单面平衡方法,后来发展为三圆平衡法。张利等[3]基于模糊控制设计了变步长寻优动平衡方案,提高了自动平衡效率。王维民等[4]提出了一种无试重动平衡方法,并进行了相关试验验证及现场应用。该方法通过在平衡面上虚拟施加不平衡量,确定振动相位相对于激振力的滞后角,完成不平衡识别。黄金平、岳聪等[5-6]提出了基于转子加速起动瞬态响应振幅对柔性转子进行瞬态平衡的方法,实现了避免相位测量和定转速测试的要求,但起停车次数较多。刘淑莲等[7]结合全息谱分析技术,将与轴承相关的力都归结到油膜力中,通过分离振动信号中的工频响应来识别不平衡量。Saldarriaga等[8]学者基于转子在选定平衡转速下的稳态响应,构建了识别转子不平衡大小和方位的逆问题,通过优化迭代求解动平衡最优解,并在一垂直安装的转子上进行了验证。近年来,一些文献[9-13]提出了基于遗传算法、二次规划、粒子群算法等优化方法的柔性转子不平衡识别和平衡方法,取得了一定成效。可以看出,优化方法在转子平衡上已经取得了很好的应用效果,但大都基于传统平衡方法的求解框架,属于稳态方法,过程繁琐。仅有的瞬态平衡法又需多次加重起车,且难以平衡高阶模态。因此,建立基于转子变速瞬态响应信息、起车次数少同时便于操作的平衡方法显得非常有意义。
本文基于柔性转子加速起动瞬态响应信息,通过有限元模型建立转子不平衡识别的逆问题,利用遗传算法进行求解,在识别的不平衡量反方向施加相同大小的校正量实现转子平衡。基于模型修正理论,对建立的有限元模型进行了相关性验证。该方法只需实测柔性转子起动瞬态响应,无需添加试重,可提高平衡效率和解决试重添加困难的难题。双盘转子平衡试验验证了其有效性。
1 变速转子瞬态响应计算考虑包含n个质量盘的各向同性弹性支承转子系统, 转子以恒定加速度匀加速起动, 假设弹性轴不平衡量很小, 振动主要由各特征盘上的质量偏心引起。其瞬态运动微分方程为

|
(1) |
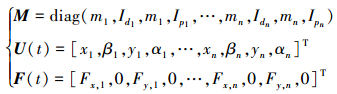
式中, 位移向量U(t), 质量矩阵M, 系统阻尼矩阵包含粘性阻尼和反对称陀螺项C(t)=C+ωG, K(t)为系统刚度矩阵, F(t)为系统瞬时不平衡激振力。质量、位移、载荷项可写成
|
(2) |
式中,Fi具有以下形式。

|
式中,mi、ei、Idi、Ipi分别为盘i的质量、偏心距、直径转动惯量和极转动惯量, ω为系统瞬时转速, a为加速度, θi是该盘上不平衡激振力的相位角变化量, θ0是其初始角度。
通常, 除简单转子模型外, 大部分柔性转子瞬态运动微分方程是难以解析求解的, 一般采取数值积分法进行分析。本文选取工程上应用较多的Newmark-β法, 当参数选择合理时, 该方法无条件稳定, 同时可保持较高精度。
2 基于瞬态响应的不平衡量识别 2.1 遗传算法遗传算法基于优胜劣汰的生存规则, 以自然选择和遗传为核心操作, 模拟自然界进化过程。把待求解问题的可行域视为基因库, 随机产生初始种群, 对个体进行优劣评价, 留下其中的优秀个体。然后通过对种群个体的染色体进行随机交换和变异, 产生新一代种群, 再次进行优选。如此不断循环, 可产生一代比一代符合评价规则的新种群, 最终趋向于最优群体, 选其中最优个体即为问题的最优解。
遗传算法有选择、交叉和变异3种基本操作, 选择保证了进入子代的都是适合目标函数的优秀个体, 交换使得各自的优良信息得以保留的同时生成更优的后代, 染色体中的某一位置以一定概率突变可让搜寻范围充满整个定义域而避免陷入局部最优。作为一种并行、全局的优化搜寻方法, 遗传算法效率高, 适合复杂和非线性问题。
2.2 识别原理和步骤不平衡识别思路为根据实测转子加速起动的瞬态响应数据, 通过建立待平衡转子的有限元模型, 用优化的思想进行迭代计算, 构建已知实际振动响应和计算响应反推激励的逆问题来识别不平衡的大小和方位。若最优解能在相同起动条件下让计算模型最大程度获得已测得的瞬态响应, 即认为此解即为转子真实不平衡量的近似值。识别了不平衡量的大小和方位, 也就完成了转子平衡的关键。
根据转子系统的瞬态特性和遗传算法的进化过程, 转子不平衡识别的优化策略和步骤如下:
1) 选取合适加速度, 在各平衡平面实测转子加速起动瞬态响应, 并进行去噪等信号预处理。
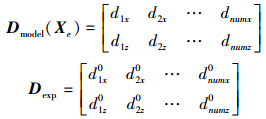
2) 目标函数设计。在测得的瞬态动挠度数据中取出λ个特征点, 包含共振峰值及衰减区的极大值(若明显)等特殊点。将不平衡大小和方位视为设计变量, 将有限元模型计算所得相同位置相同时刻的动挠度与实测值二者之间的累积差异作为目标函数, 差异值越小说明识别结果越准确。这里设计变量是受约变量, 以考虑平衡平面加重限制等情况。优化策略为Minimize

|
(3) |
式中, Xe=[me1, α1, …, men, αn]为设计变量组, 由各个盘上不平衡量的大小和方位构成。目标函数中Dmodel(Xe)为迭代过程中有限元模型计算出的响应数据, Dexp为实测响应数据。表示为
|
约束条件:
|
式中, δi为平衡平面i上的限制加重最大值。
3) 生成初始种群。在设计变量的约束区间内, 随机均匀生成初始种群, 没有加重限制时, 可取0到质量盘的一个很小百分比范围。种群个体数量可根据变量个数和计算条件决定。
4) 编码与解码。一般根据精度要求, 采用一定长度的二进制编码, 计算目标函数值时再解码成十进制数。此编码方式存在许多缺点, 由于其随机性使得局部搜索能力较差。对于复杂情形和连续变量问题, 采用浮点数编码更为精确, 效率更高。
5) 计算种群个体适应度并进行选择。因是最小值优化问题, 取目标函数值的倒数为个体适应度值, 转化为通常的最大值问题
|
(4) |
根据适应度大小, 采用轮盘赌方式选择优秀个体进入下一代。
6) 交叉运算和变异。新一代个体之间, 随机在染色体某一位置, 交叉互换等位基因。单点交叉简单易实现, 被广泛应用。为提高效率, 利用突变原理产生可能的优异个体, 采用自适应变异概率模型进行随机变异。即将个体按照适应度从小到大排列, 第i个个体(群体个体总数为p)的变异概率为
|
(5) |
(5) 式保证了变异概率与个体的适应度有关, 适应度越小, 变异概率越大。
7) 循环终止并输出最优解。循环终止条件可以取目标函数值足够小即理论计算和实测响应累积误差小于给定值, 或者循环代数达到设定值时终止运算。将进化过程中, 获得的最优解作为输出。否则, 返回步骤5)。
3 平衡试验 3.1 试验设计本文采用Bently RK4转子试验台上进行相关实验, 并利用SCADAS Ⅲ测试系统采集和处理瞬时响应数据。双盘转子试验系统由转速控制箱、驱动电机、传感器和支承等构成, 如图 1所示。每个质量盘上距离圆心3 cm处周向均匀布置有16个加重孔, 通过不同的加重组合的矢量和可实现需要添加的校正量。根据试验装置建立对应计算模型如图 2所示, 转轴全长为0.56 m, 其他详细物理参数如表 1所示。试验前转子已预平衡, 可以认为在人为加重之前该转子几乎没有不平衡量。

|
| 图 1 转子试验装置 |

|
| 图 2 双盘转子结构简图 |
| 主要参数 | 数值 |
| 轴段长度/m | l1=l5=0.02, l2=0.13, l4=0.18 |
| 轴段直径/m | d=0.01 |
| 轴段线密度/(kg·m-1) | M=0.612 5 |
| 支承刚度/(N·m-1) | k1=k2=1×105 |
| 圆盘质量/kg | m1=m2=0.8 |
| 圆盘直径/m | D=0.075 |
工程实际中往往不易正确获取转子系统诸如刚度、阻尼等动力学参数, 也难以确定有限元的边界条件, 这样所建立的有限元模型难以很好地贴近真实转子系统。据此进行的不平衡识别会导致准确度不高, 甚至无法达到平衡转子的目的。一般通过模型验证技术来检查计算模型与实验模型的逼近程度, 如果相差较大, 则需要进一步进行模型修正(model updating)。常见的模型修正方法包括优化算法反馈调整[8, 14]、试验数据拟合[15]以及利用有限元商业软件建立三维实体模型计算进行动力学匹配[16]等, 根据2个模型之间的匹配度, 选取适当的系统参数进行调整。这项技术已经有较为成熟的应用。对于工程中设计好的转子, 还有设计数据和试验数据可以辅助调整与修正建立的有限元计算模型。
针对本实验中的双盘转子系统, 首先采用文献[14]中提出的不平衡响应置信度(URAC)来验视有限元模型与实验模型之间的相关性。URAC相比于模态置信度(MAC)、频响函数置信度(FRAC)等传统指标, 直接以转子不平衡响应为度量参量, 而避免了单个模态的分解等问题, 便于实际应用。其数学表达式为

|
(6) |
式中, U(t)ij代表t时刻因j处存在不平衡而在i处产生的不平衡响应, p和s表示有限元计算模型预测量和试验测得量, 上标T为共轭转置操作符。根据定义, URAC是一个分布在0到1之间的正数, 越接近1代表越相关, 接近0代表二者几乎不相关。
采取2组不同的不平衡方案, 分别测试2盘的瞬态响应。记录转子的瞬时挠度信息, 构建所需的Us向量。按照完全对应的情况, 对有限元模型进行理论计算, 获得对应的Up。2个模型间的相关性检验方案如表 2所示。
| 编号 | 情形 |
| Ⅰ | e1=1.72g∠242.4°, e2=0;盘1瞬态响应 |
| Ⅱ | e1=1.72g∠242.4°, e2=0;盘2瞬态响应 |
| Ⅲ | e1=0, e2=0.89g∠272.5°; 盘1瞬态响应 |
| Ⅳ | e1=0, e2=0.89g∠272.5°; 盘2瞬态响应 |
通过质量盘上的环形加重孔给2盘人为添加初始不平衡, 由于该转子盘加重孔的分布方式限制了加重方位, 采用组合加重方式(括号内各分量的矢量和等于括号前加重矢量):
|
图 3给出了4种情况下试验模型和有限元模型的相关性定量分析结果。图中Z坐标为URAC值, 对角线上显示的是2个模型中对应情形下的相关性大小, 而非对角则为不同情形之间的相关性。可以看出, 图 3主要是对角占优, 非对角上数值很小, 这是很自然的。对角线上的URAC值分别为0.93、0.88、0.92、0.96, 均靠近1。因本文转子模型相对简单, 试验模型与有限元模型相关性较好, 在允许的建模误差范围内, 故无需进行进一步模型修正。

|
| 图 3 试验模型与有限元模型相关性 |
按照3.2节中的加重方式, 给2个质量盘加上不平衡量e1=1.72g∠242.4°, e2=0.89g∠272.5°。试验时设定加速度为18 rad/s2, 实际可能有轻微波动, 起动加速度大小对识别结果影响很小。采样频率为2 048 Hz, 采集时长为30 s。对采集的试验数据进行滤波处理, 2盘的加速瞬时挠度响应曲线如图 4所示。

|
| 图 4 实测不平衡响应 |
从图 4中可看出, 在初始不平衡下, 转子加速起动过程2盘振动峰值很大, 特别是第一阶模态。按照等距0.01 s从采集的瞬态响应数据中提取一系列匹配点2个方向上的位移响应值代入目标函数。
根据前文所述的步骤, 随机生成不平衡大小在区间(0.8g, 2g)、方位分布于(0, 360°)种群个体数为200的初始种群。将每个不平衡量个体代入有限元模型通过数值积分计算在相同起动加速度下的瞬态响应, 记录与试验测量位置相同、相同时刻的2个方向上的响应值, 代入目标函数进入优化过程。计算时, 最大进化代数设为100代, 单点交叉概率为Pc=0.8。优化求解结束后, 最终识别各盘上的质量不平衡大小和方位如表 3所示。在识别结果的相反方向加相同大小校正量即可平衡转子。因无法在盘上直接按照指定方位加重, 采取组合形式。图 5为优化过程中目标函数值也即计算响应与实验测得瞬态响应之间的差异变化趋势。可以看到, 迭代计算到45代左右时, 差异值已经很小并不再变化, 说明识别的结果已接近实际不平衡量, 所提方法效率和收敛性较好。
| 不平衡识别结果 | 不平衡校正组 |
| 盘1:1.64g∠238.5° | 1.64g∠58.5°(1.0g∠67.5°+0.1g∠45°) |
| 盘2:1.08g∠277.3° | 1.08g∠87.3°(1.0g∠90°+0.1g∠67.5°) |

|
| 图 5 目标函数值随代数变化 |
在识别的不平衡量相反方位施加相同大小的校正组, 再次以相同加速度起动转子, 采集平衡之后的瞬态响应数据, 并进行数据处理。图 6给出了平衡前后2盘振动响应随时间的变化情况。为方便比较, 将平衡后瞬态振动挠度降低量与初始不平衡振动量比值定义为平衡效率
|
(7) |

|
| 图 6 平衡前后残余振动 |
式中, d1为平衡前的不平衡响应挠度, d0为平衡后残余振动挠度。
可以看出,2个盘前两阶模态平衡后残余振动响应幅度比原始振动响应明显降低,特别是第一阶模态平衡效果非常显著。盘1一阶共振峰值从1 060 μm降到175 μm,减小达84.5%,二阶从238 μm降到53 μm,平衡效率77.7%;盘2一阶由平衡前的1 055 μm减小到平衡后的169.9 μm,减小了83.9%,二阶由239.8 μm降到126.3 μm,平衡效率47.3%。
4 结论转子平衡的本质是不平衡量识别,文章提出了利用转子加速起动瞬态响应,采用遗传算法识别不平衡量大小和方位的思路。给出了基于遗传算法的识别原理和实施步骤。利用模拟转子试验台和模型修正理论对有限元模型和试验模型进行了相关性检验,在保证建模精度的基础上进行了平衡方法验证试验。试验结果表明该方法是有效的,可大幅降低柔性转子瞬态振动幅值。识别过程无需添加试重,且只需加速起动实测转子振动响应,提高了平衡效率,对传感器布置空间狭小、试重施加困难等情况很有帮助。
| [1] |
孟光. 转子动力学研究的回顾与展望[J]. 振动工程学报, 2002, 15(1): 1-9.
Meng Guang. Retrospect and Prospect to the Research on Rotordynamics[J]. Journal of Vibration Engineering, 2002, 15(1): 1-9. (in Chinese) |
| [2] | Den Hartog J P. Mechanical Vibrations[M]. McGraw-Hill, New York, 1956 |
| [3] |
张利, 陈时桢, 徐娟, 等. 基于模糊控制的转子动平衡变步长寻优方法[J]. 中国机械工程, 2015, 26(23): 3167-3171.
Zhang Li, Chen Shizhen, Xu Juan, et al. Variable Step Size Optimization Method of Rotor Dynamic Balance Based on Fuzzy Control[J]. China Mechanical Engineering, 2015, 26(23): 3167-3171. DOI:10.3969/j.issn.1004-132X.2015.23.009 (in Chinese) |
| [4] |
王维民, 高金吉, 江志农, 等. 旋转机械无试重现场动平衡原理与应用[J]. 振动与冲击, 2010, 29(2): 212-215.
Wang Weimin, Gao Jinji, Jiang Zhinong, et al. Principle and Application of No Trial Weight Field Balancing for a Rotating Machinery[J]. Journal of Vibration and Shock, 2010, 29(2): 212-215. (in Chinese) |
| [5] |
黄金平, 任兴民, 邓旺群. 利用升速响应振幅进行柔性转子的模态平衡[J]. 机械工程学报, 2010, 46(5): 55-62.
Huang Jinping, Ren Xingmin, Deng Wangqun. Novel Modal Balancing of Flexible Rotor by Using the Run-up Amplitude[J]. Journal of Mechanical Engineering, 2010, 46(5): 55-62. (in Chinese) |
| [6] |
岳聪, 任兴民, 邓旺群. 基于柔性转子升速模态响应信息的多面平衡法[J]. 航空动力学报, 2013, 28(11): 2593-2599.
Yue Cong, Ren Xingmin, Deng Wangqun, et al. Multi-Plane and Multi-Critical Transient Dynamic Balance Method Based on Rising Speed Response Information of Flexible Rotor System[J]. Journal of Aerospace Power, 2013, 28(11): 2593-2599. (in Chinese) |
| [7] |
刘淑莲, 李强, 郑水英. 基于全息谱分析的非线性转子系统不平衡量识别[J]. 机械工程学报, 2010, 46(17): 62-67.
Liu Shulian, Li Qiang, Zheng Shuiying. Unbalance Identification of Nonlinear Rotor System Based on Holospectrum Analysis[J]. Journal of Mechanical Engineering, 2010, 46(17): 62-67. (in Chinese) |
| [8] | Saldarriaga M V, Steffen V, Hagopian J, et al. On the Balancing of Flexible Rotating Machines by Using an Inverse Problem Approach[J]. Journal of Vibration and Control, 2011, 17(7): 1021-1033. DOI:10.1177/1077546310370669 |
| [9] | Taplak H, Erkaya S, Uzmay I. Passive Balancing of a Rotating Mechanical System Using Genetic Algorithm[J]. Scientia Iranica, 2012, 19(6): 1502-1510. DOI:10.1016/j.scient.2012.10.026 |
| [10] | Saldarriaga M V, Mahfoud J, Steffen Jr V, et al. Adaptive Balancing of Highly Flexible Rotors by Using Artificial Neural Networks[J]. Smart Structures and Systems, 2009, 5(5): 507-515. DOI:10.12989/sss.2009.5.5.507 |
| [11] | Wang Xiufeng. SQP Algorithms in Balancing Rotating Machinery[J]. Mechanical Systems and Signal Processing, 2007, 21(3): 1469-1478. DOI:10.1016/j.ymssp.2006.06.003 |
| [12] |
陈东超, 顾煜炯, 徐婧, 等. 基于广义回归神经网络的转子系统质量不平衡辨识[J]. 汽轮机技术, 2015, 57(6): 440-443.
Chen Dongchao, Gu Yujiong, Xu Jing, et al. Identification of Mass Unbalance in a Rotor System Based on Generalized Regression Neural Network Model[J]. Turbine Technology, 2015, 57(6): 440-443. (in Chinese) |
| [13] |
王星星, 吴贞焕, 杨国安, 等. 基于改进粒子群算法的最小二乘影响系数法的理论及实验研究[J]. 振动与冲击, 2013, 32(8): 100-104.
Wang Xingxing, Wu Zhenhuan, Yang Guo'an, et al. Theory and Tests for Least Square Influence Coefficient Method Based on an Improved Particle Swarm Optimization Algorithm[J]. Journal of Vibration and Shock, 2013, 32(8): 100-104. (in Chinese) |
| [14] | Jha A K, Dewangan P, Sarangi M. Model Updating of Rotor Systems by Using Nonlinear Least Square Optimization[J]. Journal of Sound and Vibration, 2016, 373: 251-262. DOI:10.1016/j.jsv.2015.12.039 |
| [15] |
陈曦, 廖明夫, 刘展翅, 等. 一种弹性支撑柔性转子模态动平衡方法[J]. 南京航空航天大学学报, 2016, 48(3): 402-409.
Chen Xi, Liao Mingfu, Liu Zhanchi, et al. Modal Balancing Method for Flexible Rotors with Elastic Supports[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2016, 48(3): 402-409. (in Chinese) |
| [16] | Li Xiaofeng, Zheng Longxi, Liu Zhenxia. Balancing of Flexible Rotors without Trial Weights Based on Finite Element Modal Analysis[J]. Journal of Vibration and Control, 2012, 19(3): 461-470. |
2. AECC Hunan Aviation Powerplant Research Institute, Zhuzhou 412002, China
