

近年来高超声速飞行器的发展越来越快, 高超声速飞行器一般具有速度高、飞行距离长等特点。其中再入滑翔段是高超声速飞行过程中十分重要的一个阶段, 在该阶段飞行器减速下降, 并消耗它具有的巨大能量[1]。
随着高超声速飞行器发展的深入进行, 再入段的制导律设计越来越受到重视[2]。高超声速飞行器的制导技术可以被分为2类:使用标称弹道制导方法和使用预测校正能力的制导方法[3]。在预测校正控制器中引入平衡滑翔条件从而将动压、过载、热流等轨迹约束引入。例如文献[4]中通过对平衡滑翔条件的分析得出倾侧角指令, 文献[5]中以阻力加速度为标称量进行推演, 得到包含动压、热流、过载以及平衡滑翔约束的再入走廊。
航天飞机以及宇宙飞船的成功试验表明上述制导方法都能够比较有效地解决再入过程中遇到的各类问题。对于高超声速飞行器而言要完成突防任务, 除了上述制导算法考虑的因素之外, 还需要考虑回避地理敏感区域。关于这方面的研究工作涉及较少。Erzberger和Lee、Shapira和Ben-Asher在文献[6-7]中计算了最优转弯的方法。Yang和Zhao使用了一种离散的搜索策略。Vian和Moore、Twigg[8-9]使用了比例代价来远离威胁。Rahunathan等[10]使用了内部障碍惩罚函数技巧来回避禁飞区。文献[11]采用预测矫正的方法分通道构建了考虑禁飞区的再入制导问题。文献[12]中通过将禁飞区的约束进行转化从而获得了完成了考虑禁飞区的再入制导过程。
本文在总结上述方法的基础上, 提出了一种针对高超飞行器再入过程中考虑禁飞区的制导方法设计。通过设计最优规避策略, 将不等式约束转化为等式约束, 同时对指令交接状态进行分析研究, 最终完成高超飞行器再入制导方案的设计工作。针对具体任务开展仿真验证工作, 证明了本文所采用算法具有较强的适应性。
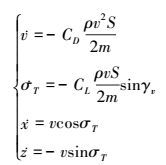
1 问题描述 1.1 高超飞行器数学模型再入段忽略飞行器发动机推力, 飞行器在再入段制导律设计时, 地球扁率的影响、旋转地球的影响相对于空气动力的影响可以忽略, 飞行器在水平面内通过倾侧角来实现侧向机动, 可得飞行器水平面内的质心运动方程组为[13]:
|
(1) |
式中, v为飞行器速度, ρ为大气密度, CD为阻力系数, S为飞行器参考面积, g为重力加速度, m为飞行器质量, CL为升力系数, γv为倾侧角, σT为弹道偏角, x为相对地面坐标系的x坐标, z为相对地面坐标系的z坐标。
1.2 飞行约束终端状态约束为:
vf=vf*, xf=xf*, zf=zf*
式中, vf、xf、zf分别为飞行器速度、x坐标、z坐标的终端位置。vf*、xf*、zf*为预期的终端状态。
高超飞行器在飞行过程中会受到各种过程约束, 典型的不等式路径约束包括热流约束、动压约束以及过载约束, 采用如下形式表示[14]:

|
(2) |
式中, k为与热流有关的常值, g0=9.81 m/s2, 
总体的任务是使飞行器从一个初始点飞向指定的目标点并满足一系列约束。其中禁飞区设定为无限高度的圆柱形区域, 从而保证飞行器无法从禁飞区上方飞过。这里(x, z, R)表示桔飞区, x、z分别表示禁飞区中心在地面坐标系中的坐标。R表示禁飞区的半径, 本文取为1 000 km。给出飞行器初始状态与终端状态的信息如表 1所示。
针对飞行任务进行算法推导, 全局的任务目标是设计制导律使飞行器从当前的初始点到达指定的目标点, 并满足各种约束, 有效地回避禁飞区。
2.1 算法假设飞行过程中需要考虑的因素较多, 为了更好地对问题进行求解做出如下假设:
1) 禁飞区是具有特定半径的圆形区域。
禁飞区模型的简化保证了制导算法推演的可行性, 同时其他形状的禁飞区也可以被近似为圆形区域。将禁飞区表示为(xw, zw, Rw), 其中3个量分别表示禁飞区的x坐标、z坐标和禁飞半径。
2) 绝对不能进入禁飞区。
保证禁飞区不可穿越, 避免生成航迹被修改。
3) 攻角通过再入走廊规划, 考虑水平面内的机动, 控制量为倾侧角;
主要考虑水平面内的制导算法设计过程, 攻角通过对各种约束的处理预先确定为攻角与马赫数的函数。
上述的各个假设都会对结果产生影响。能够使问题的处理更加高效。
2.2 最优规避策略针对最优规避策略要求, 代价函数选取如下[15]

|
(3) |
式中,Φ[X(tf), tf]为终端约束, F[X(t), u(t), t]为被积函数。
终端位置约束可以表示为:

|
(4) |
式中, (x(tf), z(tf))为终端时刻的x坐标、z坐标, (xT, zT)为目标点的x坐标、z坐标。
考虑禁飞区, 引入不等式约束:

|
(5) |
式中, 

|
(6) |
式中,α为非零常数。
这里重点考虑终端约束与禁飞区约束, 取F[X(t), u(t), t]=0。
终端状态被用来确定伴随变量的终值, 在哈密尔顿函数中不加以体现。结合动力学方程和约束条件, 取定哈密尔顿函数为:

|
(7) |
式中, λ为伴随变量, μw为与禁飞区相关的系数, 考虑禁飞区μw≠0, 不考虑禁飞区时μw=0。

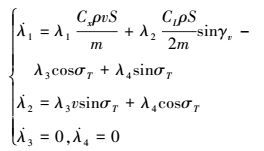
飞行器在飞行过程中距离禁飞区较远的情况下μw=0, 按照常规的最优制导律求解方法进行求解。结合质心运动方程可得伴随方程为:
|
(8) |
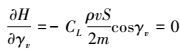
通过伴随方程的迭代获得伴随变量的值。根据最优控制理论, 控制变量γv可以通过求解最优控制方程获得。
|
(9) |
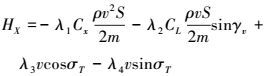
哈密尔顿方程展开式为:
|
(10) |
由于
|
(11) |
式中,γvcmax、γvcmin分别为倾侧角受到约束的最大正值和最小负值。实际仿真过程中需要对倾侧角的变化率进行约束, 避免倾侧角指令变化过快。
2.4 禁飞区指令求解飞行器在飞行过程中经过禁飞区, 考虑飞行器在禁飞区附近的情况, 即μw≠0的情形。要求飞行器沿禁飞区边界或者按照最小转弯半径绕过禁飞区。为简化计算过程, 相关量取为二次方的形式, 取W1=Sw2-R12-α2, 其中R1取禁飞区半径与最小转弯半径之间的较大者。通过参数α大小的调整确定飞行器飞行过程中距离禁飞区边界的距离。要求飞行器制导指令在飞行过程中不允许出现跳变, 则有:

|
(12) |
式中,W1(1)表示W1的一节导数, W1(2)表示W1的二阶导数, 结合飞行器运动方程(1)和禁飞区约束(6)式有:
W1=(x-xw)2+(z-zw)2-R12-α2
求一阶倒数有:
|
结合上式求二阶导数有:

|
结合质心动力学方程, 通过上式求解
|
(13) |
结合

|
(14) |
式中, Δx=xw-x, Δz=zw-z。至此完成倾侧角指令的求解。
2.5 指令交接根据上述求解过程可知, 考虑禁飞区飞行器飞行过程包括禁飞区前段、禁飞区以及禁飞区后段3个阶段, 3个阶段指令求解方式不同, 制导指令要求尽量平滑, 需要对各个阶段之间的交接情况进行处理。
为使指令变换平顺, 这里加入一个惯性环节Φ(s)=1/(τs+1), 通过τ的选取对倾侧角的变化率做出限制。如图 1所示是加入惯性环节后指令局部放大图。从图中可以看出, 在120 s倾侧角指令发生变化, 有惯性环节存在时飞行器倾侧角指令变化较为平顺, 无惯性环节时, 倾侧角变化直接跳变, 这对实际的控制系统来说是不满足条件的。通过惯性环节的添加完成各个阶段之间指令的平滑过渡。

|
| 图 1 惯性环节指令对比 |
为验证上述算法的有效性需要建立完整数字仿真模型, 从而进行验证。
3.1 不同目标点高超声速飞行器由于飞行速度快制导算法需要快速收敛, 同时算法需要根据任务需求进行调整, 完成轨迹规划过程。这里选取不同的目标点进行仿真分析, 并记录算法的收敛时间, 该仿真过程在普通计算机上完成。不同目标点的在地面坐标系的信息如表 2所示。起点为地面坐标系原点, 高度为50 km。
根据表中数据开展仿真验证, 结果如下:

|
| 图 2 不同目标点的适应性分析 |
通过仿真验证可以看出, 本文所采用的算法对于不同目标点的情况具有较强的适应性, 能够在对威胁区进行有效回避的前提下到达目标点。且算法的收敛时间在1 s以内, 能够满足系统快速收敛的要求。
3.2 不同禁飞区为进一步验证算法的适应性, 这里固定目标点采用针对不同的禁飞区进行仿真验证。目标点取为目标点1。

|
| 图 3 不同禁飞区的轨迹 |

|
| 图 4 不同禁飞区的倾侧角指令 |
通过上述仿真可以看出, 本文的算法对不同的威胁区也具有较好的适应性。倾侧角指令中的锯齿线性是由于在棒棒控制的基础上添加了惯性环节, 从而保证倾侧角指令不会跳变。
4 结论本文针对高超声速飞行器再入过程中的禁飞区问题进行了研究, 提出了一种基于最优规避策略的制导方法, 完成了再入制导过程。通过仿真实验验证, 本文设计的算法能够有效对禁飞区存在的情况进行处理, 并且生成的倾侧角指令不会出现跳变, 能够满足控制系统的跟踪需求。对于变目标、变禁飞区的情况均具有较好的适应性。
| [1] | Wingrove R C. Survey of Atmosphere Re-Entry Guidance and Control Methods[J]. AIAA Journal, 1963, 1(9): 2019-2029. DOI:10.2514/3.1987 |
| [2] | Levy M, Shima T, Gutman S. Linear Quadratic Integrated Versus Separated Autopilot-Guidance Design[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(6): 1722-1730. DOI:10.2514/1.61363 |
| [3] | Wingrove R C. Survey of Atmosphere Re-Entry Guidance and Control Methods[J]. AIAA Journal, 1963, 1(9): 2019-2029. DOI:10.2514/3.1987 |
| [4] | Lu P. Gliding Guidance of High L/D Hypersonic Vehicles[C]//Guidance, Navigation, and Control and Co-Located Conferences, 2013:19-22 |
| [5] | Lu P. Entry Guidance and Trajectory Control for Reusable Launch Vehicle[J]. Journal of Guidance, Control, and Dynamics, 1997, 20(1): 143-149. DOI:10.2514/2.4008 |
| [6] | Erzberger H, Lee H Q. Optimum Horizontal Guidance Techniques for Aircraft[J]. Journal of Aircraft, 1971, 8(2): 95-101. DOI:10.2514/3.44235 |
| [7] | Shapira I, Ben-Asher J Z. Near-Optimal Horizontal Trajectories for Autonomous Air Vehicles[J]. Journal of Guidance, Control, and Dynamics, 1997, 20(4): 735-741. DOI:10.2514/2.4105 |
| [8] | Twigg S, Calise A, Johnson E. On-Line Trajectory Optimization Including Moving Threats and Targets[R]. AIAA-2004-5139 |
| [9] | Vian J L, Moore J R. Trajectory Optimization with Risk Minimization for Military Aircraft[J]. Journal of Guidance, Control, and Dynamics, 1989, 12(3): 311-317. DOI:10.2514/3.20410 |
| [10] | Raghunathan A U, Gopal V, Subramanian D, et al. 3D Conflict Resolution of Multiple Aircraft via Dynamic Optimization[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, Reston, 2003:11-14 |
| [11] |
赵江, 周锐, 张超. 考虑禁飞区规避的预测校正再入制导方法[J]. 北京航空航天大学学报, 2015, 41(5): 864-870.
Zhao Jiang, Zhou Rui, Zhang Chao. Predictor-Corrector Reentry Guidance Satisfying No-Fly Zone Constraints[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(5): 864-870. (in Chinese) |
| [12] |
王青, 莫华东, 吴振东, 等. 考虑禁飞圆的高超声速飞行器再入预测制导[J]. 哈尔滨工业大学学报, 2015, 47(2): 104-109.
Wang Qing, Mo Huadong, Wu Zhendong, et al. Predictive Reentry Guidance for Hypersonic Vehicles Considering No-Fly Zone[J]. Journal of Harbin Institute of Technology, 2015, 47(2): 104-109. DOI:10.11918/j.issn.0367-6234.2015.02.019 (in Chinese) |
| [13] |
李新国, 方群. 有翼导弹飞行动力学[M]. 西安: 西北工业大学出版社, 2008.
Li Xinguo, Fang Qun. Flight Dynamics for Winged Missile[M]. Xi'an: Northwestern Polytechnical University Press, 2008. (in Chinese) |
| [14] | Xie Y, Liu L, Tang G, et al. Highly Constrained Entry Trajectory Generation[J]. Acta Astronautica, 2013, 88(3): 44-60. |
| [15] |
杨军. 飞行器最优控制[M]. 西安: 西北工业大学出版社, 2011.
Yang Jun. Optimal Control for the Vehicles[M]. Xi'an: Northwestern Polytechnical University Pres, 2011. (in Chinese) |
