

2. 上海大学 机电工程与自动化学院, 上海 200072
随着柔性机器人和机械臂应用范围的不断增加, 人们对其运动速度和定位精度提出了更高的要求。然而由于自身结构刚度和阻尼较低, 柔性机械臂容易产生幅度较大且不易衰减的振动。长时间振动不仅会降低柔性机械臂定位精度和操作性能, 甚至会引起结构疲劳损伤, 缩短设备寿命。在振动控制领域, 压电材料机电耦合性强、频响大且易于加工, 得到了众多学者的研究[1-3]。
引起柔性机械臂振动的一个重要因素为机械臂操作过程中不规律的外界扰动力, 因此柔性机械臂振动抑制的一个重要问题是补偿这些扰动对系统的影响。然而在众多控制方法中, 仅有个别控制方法在建模和设计过程中考虑了扰动对系统的影响, 如H∞控制、自适应控制和抗扰控制等。其中, 抗扰控制通过观测系统所受外界扰动与系统状态变量, 并将观测值反馈到系统中形成闭环回路, 极大程度地降低了扰动对系统的影响, 非常适合用于抑制由外界扰动所引起的振动。在已知文献中, 存在几种不同的抗扰控制方法。韩京清[4]提出了由过渡过程、扩张状态观测器(ESO)、非线性反馈等部分所构成的自抗扰控制, 该方法中非线性函数的应用实现了观测器和状态反馈的变增益特性, 提高了系统的抗扰性。然而由于缺乏对此类非线性反馈的完备理论, 对自抗扰控制系统的参数计算和调整需要对被控系统特性的了解和一定的经验[5]。Gao[6]提出了采用线性扩张状态观测器(LESO)的自抗扰控制方法, 通过传统的回路成型和极点配置等方法即可计算观测器和控制器增益。该方法简洁明了, 在高增益的情况下可以获得优秀的抗扰性能, 但同时高增益会使系统对噪声更加敏感。Müller和Lückel[7]提出并开发了一种采用比例积分(PI:proportional integral)观测器的抗扰控制方法, 通过观测器估计扰动并将估计值反馈到控制回路中。随后Müller[8]提出了使用Lyapunov方程配置观测器增益的设计方法。基于Müller的研究成果, Zhang等[9-10]将PI观测器扩展为通用比例积分观测器(GPI:generalized proportional integral), 使用Riccati方程求解观测器增益, 并将其应用于压电悬臂梁的振动抑制。GPI观测器能够准确地估计频率已知的扰动, 因此使用GPI观测器的抗扰控制对已知频率扰动引起的振动具有出色的抑制效果。Lyapunov方程和Riccati方程都能设计出稳定的抗扰控制系统, 但得到的观测器增益值较为保守, 造成观测器收敛速度较慢。此外, 在实际建模过程中未知因素的存在会使系统模型出现一定误差, 影响控制系统的控制效果。然而在以上抗扰控制的设计过程中, 并未考虑控制系统的鲁棒性。当系统模型存在一定误差时, 这些方法的控制性能会有所下降。
针对以上问题, 在Müller[8]和Zhang[9-10]的研究基础上, 本文提出并开发了一种基于H∞优化的抗扰控制方法并应用于压电柔性机械臂的振动抑制。本抗扰控制方法中, 使用闭环系统的H∞混合灵敏度作为优化指标设计具有鲁棒性的观测器和控制器, 通过权函数和极点区域保证系统的低频动态响应和对高频噪声的抑制。得益于观测器快速的动态响应, 控制系统获得了较好的抗扰性能。另一方面, H∞优化抗扰控制的鲁棒性使其在系统模型存在一定误差时仍能保持良好的控制性能。通过压电柔性机械臂振动抑制仿真, 验证了H∞优化抗扰控制方法, 并在振动抑制效果方面与使用GPI观测器的抗扰控制进行比较。仿真结果表明, H∞优化抗扰控制具有良好的振动抑制性能, 并且当系统模型存在一定误差时, 仍能保持较好的振动抑制性能。
1 压电柔性机械臂建模压电柔性机械臂结构示意图如图 1所示, 柔性机械臂根部通过连接结构安装在旋转关节上, 旋转关节带动柔性机械臂在水平平面内做旋转运动。压电致动器和压电传感器平行粘贴于柔性机械臂两侧, 分别负责输出振动抑制作用力和感应柔性机械臂应变。两片压电片和控制器组成了闭环控制系统, 压电传感器随柔性机械臂振动产生感应电信号, 控制器根据感应信号计算振动抑制信号以控制压电致动器输出作用力抑制柔性机械臂振动。

|
| 图 1 压电柔性机构臂结构示意图 |
为简化建模过程, 假设旋转关节为刚性体, 视其为柔性机械臂的刚性固定端。本文中柔性机械臂为薄壁结构, 采用Reissner-Mindlin板壳理论和有限元法对柔性机械臂进行建模, 所使用壳单元为二次Serendipity单元。对于压电材料, 其线性本构方程可表述为
|
(1) |

|
(2) |
式中,σ、c、ε、E、D、∈分别为应力向量、弹性常数矩阵、应变向量、电场向量、电位移向量、介电常数矩阵; e=dc, d为压电常数矩阵。应用Hamilton原理, 可得到柔性机械臂与压电片整体结构的动力学模型如下

|
(3) |
式中,q、ϕa和f为节点位移向量、致动器电压向量和外力扰动向量。矩阵Muu、Cuu、Kuu、Kuϕ分别表示质量矩阵、阻尼矩阵、刚度矩阵、压电耦合刚度矩阵。由虚功原理, 可得到节点位移与压电传感器输出电压之间的关系式如下

|
(4) |
式中,ϕs代表压电传感器输出电压向量, 矩阵Kϕu、Kϕϕ为耦合电容矩阵、压电电容矩阵。
为了建立用于控制器设计的状态空间模型, 定义状态向量x、输入向量u、被测输出向量y和被控输出向量z如下

|
(5) |
联合(3) 式和(4) 式建立状态空间模型为
|
(6) |
式中矩阵A、B、N、C1、D1、C2、D2分别为系统矩阵、输入矩阵、扰动输入矩阵、被测输出矩阵、被测输出馈通矩阵、被控输出矩阵和被控输出馈通矩阵, 以上矩阵分别由以下各式计算而得
|
(7) |
|
(8) |

|
(9) |
|
(10) |
|
(11) |
考虑如(6) 式中的线性时不变系统控制问题, 当系统受到较强的外部扰动f影响时, 系统的控制效果会变差, 甚至变得不稳定。抗扰控制的主要目标, 即为消除外部扰动对系统的影响, 使系统在受到较强扰动的情况下仍可达到设定的控制目标。抗扰控制的核心思想是:通过一个特定的观测器观测系统所受外部扰动和系统状态并将观测值反馈到系统中形成闭环回路, 使外部扰动与其观测值相互消减, 从而减弱甚至消除外部扰动对系统的影响并提高系统抗扰能力。
如图 2所示。虚线框中为基于Luenberger观测器结构所构建的PI或GPI观测器, 用于观测系统扩展状态向量[x, v]T。其中向量v为用于估计扰动f的基向量。当观测器稳定时, 向量x、v和y的观测值


|
| 图 2 抗扰控制原理图 |
为了观测外部扰动, 首先建立扰动f的数学模型如下所示
|
(12) |
其中矩阵H和V分别用于描述f与v之间的线性关系和向量v自身动态特性, Hv和Δ分别代表扰动的线性部分和残余误差。
当扰动的动态特性已知时, 可根据扰动的阶次或频率信息等选择泰勒级数或傅里叶级数来对扰动进行建模, 如Zhang等[9-10]使用含有扰动频率信息的傅立叶级数建立了GPI观测器的扰动模型。若扰动信息完全未知, 可参考PI观测器中扰动模型[11], 即阶跃函数

|
(13) |
当系统采样间隔足够小时, 残余误差Δ可忽略[12], 即

|
(14) |
联合(12)~(13) 式可得到H和V的值为

|
(15) |
一般的状态观测器只能用于观测系统状态而不能观测系统所受扰动, 因此建立由系统状态向量x和扰动基向量v构成的扩展系统并构建状态观测器, 通过观测值
|
(16) |
式中,Ae、Be、Ne、Ce、De分别为扩展系统的系统矩阵、输入矩阵、残余误差影响矩阵、被测输出矩阵和被测输出馈通矩阵。
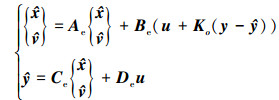
根据Luenberger观测器结构并结合(16) 式构建状态观测器如下
|
(17) |
式中,向量
为了使观测器能够快速准确地跟踪扰动, 需要保证其稳定并且具有较快的响应速度。使用S/T混合灵敏度H∞算法计算动态反馈控制器Ko, 不仅能够得到稳定的观测器, 同时可以通过加权函数设计观测器频域上的整体动态性能和鲁棒性能。首先将(17) 式中观测器系统转化为图 5所示的H∞跟踪控制问题。

|
| 图 3 H∞跟踪控制问题 |

|
| 图 4 压电柔性机械臂仿真示意图 |

|
| 图 5 低频率拔动激励下的未控制和已控制的压电柔性机械臂响应 |
在H∞跟踪控制问题中, y、e、u、d、ŷ分别为代表参考输入、跟踪误差、控制输入、测量干扰和系统输出观测值。Ko和G分别代表观测器系统的动态反馈控制器和被控系统, G的传递函数可表示为

|
(18) |
图 3中系统开环传递函数为

|
(19) |
从y至e和ŷ的闭环传递函数分别为

|
(20) |

|
(21) |
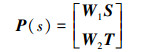
S(s)和T(s)又称作灵敏度函数和补灵敏度函数。灵敏度函数S(s)还代表系统开环频率特性相对偏差到闭环频率特性相对偏差的增益, 同时也是干扰d到输出y的闭环传递函数。因此降低S(s)增益可以减小由系统模型误差引起的闭环系统偏差, 亦可减小干扰对系统输出的影响。通过选取相应的加权函数W1(s)、W2(s)以配置闭环系统的动态性能和鲁棒稳定性, 加权函数与S(s)和T(s)之间关系为

|
(22) |

|
(23) |
σ表示系统的最大奇异值, 则要求解的H∞控制问题为:寻找真实有理函数控制器Ko, 使闭环系统稳定, 且满足

|
(24) |
|
(25) |
式中,P为加权系统, γ为H∞控制性能指标, γ越小, 控制效果越好。
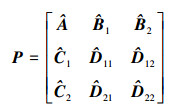
采用2-Riccati方程法[13]求解控制器Ko, 首先由加权系统P的传递函数P(s)建立状态空间模型如下
|
(26) |
则得到混合灵敏度H∞控制器Ko的状态空间模型如下
|
(27) |
式中

|
(28) |
|
(29) |
|
(30) |

|
(31) |
式中,X和Y可通过求解以下2个Riccati方程获得

|
(32) |

|
(33) |
得到了收敛的观测信号

|
(34) |
式中, Kx和Kv分别为
对于(6) 式中系统设计H∞状态反馈控制律, 使得闭环系统满足设计目标如下

|
(35) |
式中,Tfz为扰动信号f至被控输出z的闭环传递函数矩阵, γ为H∞控制性能指标。同时, 为了使闭环系统具有一定的动态特性, 需配置闭环系统的极点在复平面中特定区域

|
(36) |
区域D是线性矩阵不等式(LMI)区域, 对称矩阵L和矩阵M是用于刻画LMI区域的m×m维矩阵。闭环系统极点与复平面虚轴距离越远, 则系统动态响应速度越快。通过求解以下LMI凸优化问题
|
(37) |
可得到状态反馈增益矩阵为

|
(38) |
式中,Y*和X*为问题(37) 的最优解。
为了使反馈回路系统的扰动观测量与真实扰动相互消减, 需要设计适合的反馈矩阵Kv。定义矩阵Xv为向量x与v的线性映射矩阵[16]

|
(39) |
联合(12) 式和(39) 式可得

|
(40) |
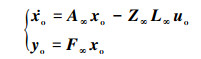
将(34)、(39)、(40) 式代入系统状态空间模型(6) 中并忽略向量x和v的观测值与真实值之间的误差可得

|
(41) |

|
(42) |
将(15) 式代入(41)、(42) 式可得

|
(43) |
则Kv可通过求解(43) 式而得。
3 仿真验证 3.1 仿真设定如图 4所示, 在仿真中一个外部扰动力施加在柔性机械臂末端的中点, 该扰动力方向与柔性机械臂正视图平面相垂直。但为了验证控制算法对模型变化的鲁棒性, 在(6) 式中假设扰动力的施加位置水平向左偏移210 mm。压电柔性机械臂的材料参数和几何参数详见表 1和表 2。
| 材料属性 | 符号 | 机械臂 | 压电片 |
| 杨氏模量/GPa | Y | 210 | 67 |
| 密度/(kg·m-3) | ρ | 7 900 | 7 800 |
| 泊松比 | ν | 0.3 | |
| 压电常数/(C·N-1) | d31, d32 | - | -2.1×10-10 |
| 介电常数/(F·m-1) | ε | - | 2.13×10-8 |
| 几何属性 | 符号 | 机械臂 | 压电片 |
| 长度/mm | l1, l3 | 350 | 75 |
| 宽度/mm | W | 25 | 25 |
| 厚度/mm | h1, h2 | 0.8 | 0.25 |
| 压电片位置/mm | l2 | - | 50 |
| 扰动位置偏差/mm | l4 | 210 | —— |
在以下3个振动抑制仿真中, 设定扰动力按正弦规律变化且其频率分别为π rad/s、柔性机械臂一阶特征频率和二阶特征频率。为了验证H∞优化抗扰控制算法对于抑制外部扰动所引起振动的有效性以及对模型变化的鲁棒性, 在每个仿真中分别对模型中扰动力施加位置无偏差和有偏差2种情况进行仿真。此外, 还加入了使用GPI观测器的抗扰控制以比较2种算法的振动抑制效果及鲁棒性。
3.2.1 低频率扰动第一个仿真中, 设定扰动力频率为π rad/s。仿真结果如图 5所示, 图 5a)、图 5b)分别为模型中扰动力施加位置与实际位置无偏差和有偏差时的压电传感器电压响应信号。未控制、DR-GPI和H∞DR-PI 3条曲线分别表示柔性机械臂在未控制状态、使用抗扰控制(GPI观测器)和H∞抗扰控制(PI观测器)状态下的压电传感器电压响应信号。
由图 5a)可见, 抗扰控制(GPI观测器)和H∞抗扰控制(PI观测器)对低频扰动引起的振动具有出色的抑制效果, 其中抗扰控制(GPI观测器)的收敛速度稍慢。结合图 5b), 不难发现当控制系统中模型与真实模型有偏差时抗扰控制(GPI观测器)的收敛速度进一步变慢, 并且收敛过程中振动幅度变大。另一方面, 模型有偏差时H∞抗扰控制(PI观测器)的振动抑制效果与模型无偏差时基本一致。
3.2.2 一阶特征频率扰动仿真二结果如图 6所示, 即柔性机械臂受一阶特征频率扰动激励下的压电传感器电压响应信号。图 6a)和图 6b)分别为模型中扰动力施加位置与实际位置无偏差和有偏差时的压电传感器电压响应信号。

|
| 图 6 一阶特征频率拔动激励下的未控制和已控制的压电柔性机械臂响应 |
由图 6a)可知, 在模型中扰动位置与实际位置无偏差时, 抗扰控制(GPI观测器)和H∞抗扰控制(PI观测器)均能较好地抑制由机械臂一阶特征频率扰动引起的振动, 但抗扰控制(GPI观测器)的收敛速度较慢。而当模型中扰动位置有偏差时, 如图 6所示, 抗扰控制(GPI观测器)的振动抑制效果变差, 收敛速度明显变慢且振动幅度增大。由于H∞抗扰控制(PI观测器)较好的鲁棒性, 模型中扰动位置有偏差时其仍然保持优秀的振动抑制性能。
3.2.3 二阶特征频率扰动最后的仿真中, 扰动力频率设定为压电柔性机械臂的二阶特征频率。仿真结果如图 7所示, 图 7a)、图 7b)分别为模型中扰动力施加位置与实际位置无偏差和有偏差时的压电传感器输出信号。

|
| 图 7 二阶特征频率扰动激励下的未控制和已控制的压电柔性机械臂响应 |
如图 7a)所示, 具有二阶特征频率的扰动同时激发出了柔性机械臂的一阶模态和二阶模态振动。由于抗扰控制(GPI观测器)中扰动模型的频率为二阶特征频率, 故其能够较好的抑制二阶模态振动, 但对一阶模态振动的抑制效果欠佳。H∞抗扰控制(PI观测器)则恰好相反, 对一阶模态振动的抑制效果优于对二阶模态振动的抑制效果。这种现象的原因为PI观测器响应速度有限, 不能及时估计高频扰动, 造成对高阶模态振动的抑制性能下降。从整体的振动抑制效果来看, H∞抗扰控制(PI观测器)略优于抗扰控制(GPI观测器)。如图 7b)所示, 模型中扰动位置有偏差时, 抗扰控制(GPI观测器)的振动抑制效果变差, 但H∞抗扰控制(PI观测器)的振动抑制效果仍保持良好状态。
4 结论本文提出并开发了一种基于H∞优化的抗扰控制方法, 并将其应用于压电柔性机械臂的振动抑制。基于抗扰控制中观测并反馈扰动的基本原理, 通过H∞优化方法设计了具有鲁棒性的观测器和控制器。此外, 权函数和区域极点配置的使用保证了观测器和控制器快速的低频动态响应和良好的鲁棒性。在压电柔性机械臂振动抑制仿真中, 分别在系统模型准确、系统模型存在误差、低频扰动和高频扰动等多种情况下对H∞优化抗扰控制进行了验证, 同时与使用GPI观测器的抗扰控制进行比较。仿真结果表明, 对于低频或高频未知扰动所引起的柔性机械臂振动, H∞优化抗扰控制都能达到良好的抑制效果。此外, 当系统模型存在一定误差时, H∞优化抗扰控制仍能保持良好的振动抑制效果, 说明其具有较强的鲁棒性。
| [1] |
杨智春, 孙浩. 模态自适应相位调制的多压电元件压电分流系统[J]. 振动与冲击, 2011, 30(11): 90-94.
Yang Zhicun, Sun Hao. Piezoelectric Shunt Damping System with Multiple Transducers Using Techniques of Mode Adaptation and Phase Shift[J]. Journal of Vibration and Shock, 2011, 30(11): 90-94. DOI:10.3969/j.issn.1000-3835.2011.11.019 (in Chinese) |
| [2] |
闫云聚, 姜节胜, 任礼行. 智能材料结构及在振动控制中的应用研究评述和展望[J]. 西北工业大学学报, 2000, 18(1): 35-40.
Yan Yunju, Jiang Jiesheng, Ren Lixing. A Review and Prospect for Intelligent Materials/Structures and Their Applications in Vibration Control[J]. Journal of Northwestern Polytechnical University, 2000, 18(1): 35-40. (in Chinese) |
| [3] | Qu W Z, Sun J C, Qiu Y. Active Control of Vibration Using a Fuzzy Control Method[J]. Journal of Sound and Vibration, 2004, 275, 3: 917-930. |
| [4] |
韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23.
Han Jingqing. Auto-Disturbances-Rejection Controller and Its Applications[J]. Control and Decision, 1998, 13(1): 19-23. (in Chinese) |
| [5] |
李海生, 朱学峰. 自抗扰控制器参数整定与优化方法研究[J]. 控制工程, 2004, 11(5): 419-423.
Li Haisheng, Zhu Xuefeng. On Parameters Tuning and Optimization of Active Disturbance Rejection Controller[J]. Control Engineering of China, 2004, 11(5): 419-423. (in Chinese) |
| [6] | Gao Z Q. Scaling and Bandwidth-Parameterization Based Controller Tuning[C]//Proceedings of the 2003 American Control Conference, 2003: 4989-4996 |
| [7] | Müller P C, Lückel J. Optimal Multivariable Feedback System Design with Disturbance Rejection[J]. Problems of Control and Information Theory, 1977, 6(3): 211-227. |
| [8] | Muller P C. Nonlinearity Estimation and Compensation by Linear Observers: Theory and Applications[C]//2000 2nd International Conference on Control of Oscillations and Chaos, 2000, 1: 16-21 |
| [9] | Zhang S Q, Li H N, Schmidt R, et al. Disturbance Rejection Control for Vibration Suppression of Piezoelectric Laminated Thin-Walled Structures[J]. Journal of Sound and Vibration, 2014, 333(5): 1209-1223. DOI:10.1016/j.jsv.2013.10.024 |
| [10] | Zhang S Q, Schmidt R, Müller P C, et al. Disturbance Rejection Control for Vibration Suppression of Smart Beams and Plates under a High Frequency Excitation[J]. Journal of Sound and Vibration, 2015, 353: 19-37. DOI:10.1016/j.jsv.2015.05.018 |
| [11] | Söffker D, Yu T J, Müller P C. State Estimation of Dynamical Systems with Nonlinearities by Using Proportional-Integral Observer[J]. International Journal of Systems Science, 1995, 26(9): 1571-1582. DOI:10.1080/00207729508929120 |
| [12] | Müller P. Design of PI-Observers and Compensators for Nonlinear Control System[C]//Proceedings of the 14th International Workshop on Dynamics and Control, 2008: 223-231 |
| [13] | Doyle J C, Glover K, Khargonekar P P, et al. State-Space Solutions to Standard H2 and H∞ Control Problems[J]. IEEE Trans on Automatic Control, 1989, 34(8): 831-847. DOI:10.1109/9.29425 |
| [14] | Choi H H, Chung M J. Observer-Based H∞ Controller Design for State Delayed Linear Systems[J]. Automatica, 1996, 32(7): 1073-1075. DOI:10.1016/0005-1098(96)00014-3 |
| [15] |
申铁龙. 基于观测器的H∞鲁棒次优性能回复设计[J]. 自动化学报, 1994, 6: 743-749.
Shen Tielong. A Performance Recovery Approach to H∞ Robust Sub-optimal Control via Observer[J]. Acta Automatica Sinica, 1994, 6: 743-749. (in Chinese) |
| [16] | Müller P C. Estimation and Compensation of Nonlinearities in Descriptor Systems[C]//6th IFAC Symposium on Nolinear Control Systems, 2004: 1313-1317 |
2. School of Mechatronic Engineering and Automation, Shanghai University, Shanghai 200444, China
