

2. 航天飞行动力学国家级重点实验室, 陕西 西安 710072
传统运载火箭通常采用比例微分+校正网络的姿态控制结构, 根据不同的标称飞行状态进行设计, 通过调整控制器参数来适应火箭飞行状态的变化[1]。随着空间发射任务日益复杂、多样, 传统运载火箭受到重量、推力、结构的限制, 逐渐难以满足发射任务需求。大型捆绑运载火箭在结构、重量、推进方式上与传统运载火箭存在较大差异, 导致大型捆绑运载火箭变为一个变质量、刚体、弹性、贮箱燃料晃动和发动机振动相耦合的复杂动力系统, 其运动呈现出不确定性强、干扰多、参数摄动剧烈等非线性特征, 这些特征会严重影响传统姿态控制器性能甚至导致失稳, 从而给火箭姿态控制系统的分析和设计提出了新的挑战[2-4], 因此非常有必要设计控制性能好、抗干扰能力强的运载火箭姿态控制器。
随着控制方法的不断发展, 许多学者针对运载火箭的姿态控制问题展开了研究[5-11], 设计出了很多新型控制器。Sclafani和Shankar对微小卫星运载火箭存在模型不确定性和外扰作用下的刚体姿态控制问题进行了研究, 使用可变记忆递归神经网络对模型不确定性和外扰进行估计补偿, 结合PID控制器提高了姿态控制性能, 但存在网络训练不足或误差阈值选择不合适, 导致系统不稳定的问题, 有待进一步改进[5]。Florentin-Alin Buu等人针对串级运载火箭刚体姿态控制问题, 基于动态逆思想, 设计了由参考模型、线性补偿器、状态观测器和神经网络在线辨识器组成的姿态控制器, 取得了不错的控制效果, 但控制器结构稍显复杂, 对建模要求较高, 且没有验证其抗干扰能力[6]。Diego等人采用H∞鲁棒控制理论, 以欧洲VEGA运载火箭为对象, 设计了运载火箭刚体运动姿态控制器, 具有良好的鲁棒性[7]。刘玉玺等[8]为解决运载火箭全向发射后, 系统通道间存在耦合的问题, 推导了姿态角预补偿解耦控制方法, 设计了变结构自适应滑模控制器[8]。但鲁棒控制和滑模变结构控制对模型的要求较高, 对参数不确定的范围和形式具有限制, 这与新型捆绑运载火箭建模困难相冲突, 如何获取合适的数学模型成为应用上述方法的首要问题。自抗扰控制具有不依赖于被控对象的精确模型、鲁棒性强、精度高等优点, 非常适合于运载火箭姿态控制系统设计, 文献[9-11]利用扩张观测器对内外干扰和未建模部分进行估计, 结合非线性控制律进行姿态控制, 取得了不错的控制效果, 但自抗扰控制也存在设计参数多, 整定困难的问题, 文献[11]利用遗传算法和粒子算法经过600次迭代调参, 才能获得较为满意的结果, 如何快速有效地确定控制参数是自抗扰控制应用需要进一步解决的问题。上述研究主要围绕火箭刚体运动开展, 对箭体弹性振动抑制没有较为详细的探讨, 而大型捆绑运载火箭弹性频率摄动对弹性运动的影响问题不容忽视, 会直接影响传统陷波滤波器的弹性抑制效果, 造成弹性振动发散, 导致姿态失控。
本文以存在模型不确定性、姿态运动耦合、外部干扰和弹性频率摄动的运载火箭刚体、弹性运动模型为对象, 基于动态补偿线性化的思想, 将其他通道运动耦合看成干扰, 采用积分链式微分器对刚体运动受到多种因素影响产生的不确定项进行实时估计, 结合分数阶PDμ控制构成火箭刚体姿态控制器。其次, 根据一阶弹性振动的特点, 利用支持向量机技术对一阶弹性频率进行辨识, 动态调整陷波滤波器的参数实现弹性振动自适应抑制。最后, 在多种工况下使用所设计的控制器对运载火箭进行姿态控制仿真, 并与其他控制器相比较, 结果表明所设计的控制器具有较强的鲁棒性和弹性抑制能力。
1 运载火箭姿态动力学模型目前研究捆绑运载火箭的建模问题主要采用2类方法[2-4]:① 牛顿-欧拉矢量力学方法; ② 以拉格朗日方程为代表的分析力学方法。经过分析, 捆绑运载火箭与传统运载火箭相比具有以下特点:① 3个通道的刚体姿态运动存在耦合; ② 弹性振动频率受助推和芯级之间的耦合影响, 存在频率摄动, 同时与其他运动存在耦合; ③ 助推和芯级的液体晃动与其他运动存在耦合; ④ 发动机摆动与其他运动存在耦合; 鉴于运载火箭的对称特性, 结合文献[2-4]对运载火箭运动模型进行简化, 围绕前2个问题设计姿态控制系统。首先给出考虑存在通道耦合、弹性振动、惯组测量的俯仰通道动力学模型:
1) 刚体运动方程为

|
(1) |
2) 弹性振动方程为

|
(2) |
3) 惯组测量方程为

|
(3) |
式中, Δθ为火箭弹道倾角的偏差; Δα为火箭攻角的偏差; 



捆绑运载火箭在飞行过程中, 不可避免会受到阵风、参数漂移、干扰力、干扰力矩以及通道耦合等多种内外不确定因素的影响, 同时箭体弹性振动的影响不容忽视。因此, 如果能够估计这些不确定性部分, 在控制器中加以补偿, 将极大提高姿态控制器的控制性能和鲁棒性。微分器的发展为信号的跟踪提供了一种有效的途径, 利用微分器可以在不依赖系统模型的前提下估计信号导数, 具有普适性。由于大多数物体运动都可用积分链形式的微分方程来描述, 并且不确定性部分存在于最底层的微分方程中, 这样就可采用微分器估计第一个状态变量的各阶导数, 通过去掉系统运动模型中的已建模部分, 得到不确定性部分的估计值, 同时微分器具有一定的滤波效应, 可以抑制噪声的影响。
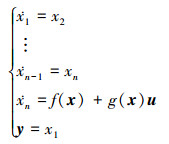
对于n阶非线性系统
|
(4) |
式中, x=(x1, …, xn)T是状态变量, f(x)、g(x)是非线性函数, u∈R、y∈R分别是控制输入和测量输出。
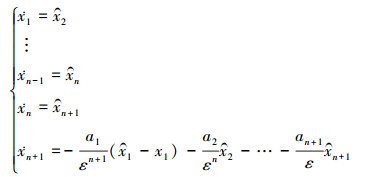
文献[12]提出, 当ε>0可以取充分小的参数, 在sn+1+an+1sn+…+a2s+a1=0满足Hurwitz时, 可设计如下积分链式微分器
|
(5) |
该微分器可对状态x进行充分逼近, 即

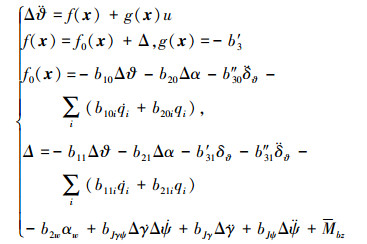
对于运载火箭俯仰通道姿态控制来说, 可以将俯仰角微分方程整理为
|
(6) |
式中, bi0为已建模系数, bi1为由各种原因引起系数的不确定部分。通过选择3阶积分链式微分器获得

分数阶微积分是将整数阶微积分拓展到实数域, 与整数阶微积分相比, 其微分和积分过程更加柔性、细腻。一般分数阶微积分表达式为
|
(7) |
为了提高运载火箭姿态控制系统性能, 引入分数阶微积分对传统运载火箭PD控制器进行改进, 通过增加分数阶微分可调参数, 使其具有更大的灵活性。这里运用分数阶PDμ控制设计火箭刚体姿态主控制器, 同时依据微分器对不确定性部分的估计值加以补偿, 则刚体姿态控制器设计为

|
(8) |
式中, Kp、Kd、μ分别为比例增益、微分增益, 微分阶次, 3者为可调参数; 
传统运载火箭常采用如下形式的陷波滤波器进行弹性抑制。
|
(9) |
该滤波器的最大陷幅幅值为20log(ξ1/ξ2)dB, 阻尼比的值决定了有效陷幅区域, 而最陷幅值发生在中心频率wn[13]。因此, 陷波器设计以事先获得的弹性模态频率为前提, 所以只能将其中心频率设计为固定值或按飞行秒点分段变化, 如果在飞行过程中实际弹性频率发生未知变化后, 滤波器的弹性抑制性能将大幅降低, 甚至出现发散不稳定的情况。大型捆绑运载火箭由于助推和芯级的质量变化、外部干扰和运动耦合导致弹性频率变化规律难以事先准确获得, 这就使得传统陷波滤波器的弹性抑制性能难以保证。
对于长细比较大的运载火箭来说, 其弹体一阶弯曲频率远大于短周期运动频率。在该条件下其弹体传递函数可很好地近似为解析表达式形式。考虑到角速度信号中噪声较大, 可选择姿态角测量信号, 通常弹体俯仰角对发动机摆角输入的传递函数可近似表示为

|
(10) |
式中, 第一项为箭体刚体运动特性, 第二项弹性振动运动特性.
(10) 式合并后为一个分母为4阶的传递函数, 其传递函数的极点为2对共轭复数, 分别为:c1±d1i、c2±d2i。由于火箭刚体、弹性运动频率特性的差异, 通常d1 < d2, 这样d2即可近似认为是箭体的一阶弹性振动频率。从而可以利用发动机摆角信号和俯仰角输出信号对(10) 式中传递函数的系数进行在线辨识, 由辨识结果计算一阶弹性振动频率, 据此对陷波滤波器的中心频率进行不断更新, 从而将传统陷波滤波器转化为自适应陷波滤波器, 抑制弹性振动的影响。考虑到快速性和数据样本量有限, 采用适合解决小样本问题的支持向量机进行参数辨识[14], 具体步骤如下:
1) 首先对发动机摆角和姿态角信号采样, 得到离散形势的输入输出信号。然后, 利用采样信号获得与连续传递函数相对应的离散形式传递函数
|
(11) |
式中,y(k)、u(k)为俯仰角和发动机摆角信号值; z为单位滞后移位算子

|
系数a1, a2…ana, b0, b1, b2…bnb为待辨识的参数。
2) 获得采样信号后, 使采用线性核函数的支持向量机辨识方法[14], 得到系数ai、bi, 获得离散传递函数
3) 由离散传递函数计算离散系统的2对共轭极点, 其中zb、zb*为实部绝对值较大的1对共轭根。根据采样时间Ts以及离散极点计算连续系统对应的箭体一阶弹性振动频率
|
(12) |
4) 利用得到的一阶弹性振动频率修改陷波滤波器的中心频率, 实现自适应弹性抑制。
5 运载火箭姿态控制器设计针对捆绑运载火箭在飞行过程中受到参数摄动、未知干扰、运动耦合等不确定性因素的影响, 采用微分干扰估计和分数阶PDμ控制思想设计刚体姿态控制器。考虑捆绑运载火箭由于弹性振动频率摄动不确定情况的影响, 设计基于支持向量机的自适应滤波器。整个运载火箭姿态控制器结构如图 1所示。

|
| 图 1 运载火箭姿态控制器结构图 |
以某型火箭在相关秒点的模型为例, 对所设计的姿态控制器进行功能验证。
6.1 刚体姿态控制验证运用Oustaloup方法对分数阶控制器进行近似[15], 选择近似频率段范围为(ωb=0.001, ωh=1 000), 近似阶次N=3。刚体姿态控制器参数设计为
|
当火箭俯仰角存在初始偏差时, 对分别采用经典PD控制、分数阶控制和本文方法所设计的控制器从响应时间、稳态误差和ITAE指标3个方面进行性能量化对比。
情况1 标称情况下, 没有参数摄动和内外干扰, 给定初始俯仰角偏差为5°;
情况2 存在常值干扰和参数摄动的不确定性情况, 将运载火箭参数向下摄动50%, 考虑内外干扰均为常值, 其中风干扰, aW=60°, 俯仰通道等效力、力矩干扰为Fby=0.2 s-1, Mbz=0.1 s-2, 给定初始俯仰角偏差为5°;
由图 2和表 1可知, 在情况1下, 相比传统PD控制和分数阶控制, 本文所设计的控制器具有更快的上升时间、调节时间, 超调量、稳态误差与ITAE指标更小。在考虑参数摄动和常值干扰的情况2下, 由图 3和表 1可知, 与标称情况相比, 系统性能均有所下降, 传统PD控制和分数阶控制器, 在受到外界干扰时, 出现约0.7°的稳态误差, 超调和响应时间增加近30%, ITAE指标增大8倍以上。而扰动对本文所设计的控制器影响不大, 性能下降不明显, 仍然保持了较好的动态性能和控制精度, 表现出较强的鲁棒性。

|
| 图 2 情况1下俯仰角偏差控制对比 |

|
| 图 3 情况2下俯仰角偏差控制对比 |
| 情况 | 控制器类型 | 上升时 间/s |
调节时 间/s |
稳态误 差/(°) |
ITAE 指标 |
| 1 | 传统PD | 0.958 | 5.3 | -0.037 | 4.3 |
| 分数阶 | 0.82 | 4.4 | 0.0045 | 2.56 | |
| 本文控制器 | 0.68 | 2.5 | 0.0026 | 0.89 | |
| 2 | 传统PD | 1.28 | 5.9 | 0.7 | 35.8 |
| 分数阶 | 1.15 | 5.33 | 0.68 | 33.9 | |
| 本文控制器 | 0.781 | 3.76 | 0.0066 | 2.39 |
假设火箭一阶弹性频率为w1=8.5+0.5 t, 利用姿态角输出和控制器输入采样信号, 使用支持向量机对箭体传递函数参数进行辨识, 计算弹性频率。
由图 4、图 5可以看出, 当火箭一阶弹性振动频率发生线性变化时, 由于初始条件设置与实际频率情况相差较远, 在4 s左右辨识误差达到1 rad/s以内, 辨识误差随时间不断减小, 能够对线性变化一阶弹性振动频率进行持续在线辨识。

|
| 图 4 时变一阶弹性频率辨识曲线 |

|
| 图 5 一阶弹性频率辨识误差 |
假设运载火箭倾角部分参数摄动为标称系统值的130%, 俯仰角部分参数摄动为标称系统值得60%, 考虑内外干扰、姿态运动耦合均为常值, 其中风干扰aW=30°, 俯仰通道等效力、力矩干扰为Fby=0.2 s-1, Mbz=0.1 s-2, 通道间耦合为



|
| 图 6 俯仰角偏差信号 |

|
| 图 7 一阶弹性广义位移对比 |
由图 6、图 7可以看出对于运载火箭模型参数存在摄动、风扰、干扰力、干扰力矩为常值不确定性、一阶弹性振动频率存在正弦时变情况下, 传统姿态控制系统无法抑制弹性振动, 鲁棒性差, 姿态和弹性振动均发散。而所设计的姿控系统总体上能够对弹性振动进行抑制, 实现姿态控制, 体现了较强的鲁棒性和弹性抑制能力。
7 结论本文针对捆绑运载火箭存在参数变化、内外干扰和弹性频率摄动情况下的姿态控制问题展开研究, 设计了由具有不确定项估计补偿能力的刚体姿态控制部分和具有弹性频率在线辨识能力的自适应弹性抑制部分构成的运载火箭姿态控制器。通过仿真验证了所设计控制器的可行性, 具有一定的工程参考价值。
| [1] |
徐延万. 弹道导弹、运载火箭控制系统设计与分析[M]. 北京: 宇航出版社, 1999.
Xu Yanwan. Design and Analysis of Ballistic Missile and Launch Vehicle Control System[M]. Beijing: China Astronautic Publishing House, 1999. (in Chinese) |
| [2] |
李家文, 李恩奇, 李道奎, 周建平. 两种捆绑火箭弹性振动建模方法对比分析及其对姿控系统的影响[J]. 国防科技大学学报, 2010, 32(4): 43-48.
Li Jiawen, Li Enqi, Li Daokui, Zhou Jianping. Comparative Analysis of Two Types of Strap-on Launch Vehicle's Elastic Vibration Modeling Method and the Influence on Attitude Control System[J]. Journal of National University of Defense Technology, 2010, 32(4): 43-48. (in Chinese) |
| [3] |
杨云飞, 李家文, 陈宇, 等. 大型捆绑火箭姿态动力学模型研究[J]. 中国科学E辑:技术科学, 2009, 39(3): 490-499.
Yang Yunfei, Li Jiawen, Chen Yu, et al. Large Strap-on Launch Vehicle's Attitude Dynamic Modeling Research[J]. Science in China Series E: Technological Sciences, 2009, 39(3): 490-499. (in Chinese) |
| [4] |
王建民, 荣克林, 冯颖川, 等. 捆绑火箭全箭动力学特性研究[J]. 宇航学报, 2009, 30(3): 821-826.
Wang Jianmin, Rong Kelin, Feng Yingchuan, et al. The Research of Dynamic Characteristics for the Strap-on Launch Vehicle[J]. Journal of Astronautics, 2009, 30(3): 821-826. (in Chinese) |
| [5] | Rodolfo Sclafani, Praveen Shankar. Variable Memory Recurrent Neural Networks for Launch Vehicle Attitude Control[C]//AIAA Guidance, Navigation and Control Conference, 2015, 1-17 |
| [6] | Florentin-Alin Butu, Romulus Lungu, Lucian-Florentin Barbulescu. Adaptive Flight Control for a Launch Vehicle Based on the Concept of Dynamic Inversion[C]//20th International Conference on System Theory, Control and Computing, 2016: 812-817 |
| [7] | Diego Navarro-Tapia, Andres Marcos, Samir Bennaniz, Christophe Roux. Structured H-Infinity Control Based on Classical Control Parameters for the VEGA Launch Vehicle[C]//IEEE Conference on Control Applications, 2016: 33-38 |
| [8] |
刘玉玺, 张卫东, 刘汉兵, 等. 全向发射状态下运载火箭变结构自适应滑模控制[J]. 宇航学报, 2015, 36(9): 1002-1008.
Liu Yuxi, Zhang Weidong, Liu Hanbing, et al. Variable Structure/Adaptive Sliding Mode Control of Launch Vehicle Based on the Omni-directional Launch[J]. Journal of Astronautics, 2015, 36(9): 1002-1008. (in Chinese) |
| [9] |
赵党军, 李新民, 王永骥, 陈虹. 基于微分代数方法的运载火箭自抗扰姿态控制[J]. 华中科技大学学报:自然科学版, 2011, 39(8): 104-107.
Zhao Dangjun, Li Xinmin, Wang Yongji, Chen Hong. Auto-Disturbance-Rejection Attitude Control of Carrier Rockets Using Differential Algebraic Approach[J]. Huazhong Univ of Sci & Tech(Natural Science Edition), 2011, 39(8): 104-107. (in Chinese) |
| [10] | Jianshuang Song, Zhang Ren, Xun Song. New Integrated Robust Disturbance Rejection Control Method for Reusable Launch Vehicle Attitude Controller Design[J]. Communications in Information Science and Management Engineering, 2013, 3(11): 540-553. |
| [11] |
程昊宇, 董朝阳, 王青. 运载火箭的抗干扰分数阶控制器设计[J]. 系统工程与电子技术, 2015, 37(9): 2109-2114.
Cheng Haoyu, Dong Chaoyang, Wang Qing. Disturbance Rejection Fractional-Order Controller Design for Launch Vehicle[J]. Systems Engineering and Electronics, 2015, 37(9): 2109-2114. DOI:10.3969/j.issn.1001-506X.2015.09.23 (in Chinese) |
| [12] | Wang Xinhua, Chen Zengqiang, Yuan Zhuzhi. Design and Analysis for New Discrete Tracking-Differentiators[J]. Applied Mathematics: A Journal of Chinese Universities, Series B, 2003, 18(2): 214-222. DOI:10.1007/s11766-003-0027-0 |
| [13] |
楚龙飞, 吴志刚, 杨超, 唐长红. 导弹自适应结构滤波器的设计与仿真[J]. 航空学报, 2011, 32(2): 195-201.
Chu Longfei, Wu Zhigang, Yang Chao, Tang Changhong. Design and Simulation of Adaptive Structure Filter for Missiles[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(2): 195-201. (in Chinese) |
| [14] |
胡良谋, 曹克强, 徐浩军, 董新民. 支持向量机故障诊断及控制技术[M]. 北京: 国防工业出版社, 2011.
Hu Liangmou, Cao Keqiang, Xu Haojun, Dong Xinmin. Support Vector Machine Fault Diagnosis and Control Technology[M]. Beijing: National Defense Industry Press, 2011. (in Chinese) |
| [15] |
薛定宇. 控制系统计算机辅助设计: MATLAB语言与应用[M]. 3版. 北京: 清华大学出版社, 2012 Xue DingYu. Control System Computer Aided Design: MATLAB Language and Application[M].3. Beijing, Tsinghua University Press, 2012(in Chinese) |
2. National Key Laboratory of Aerospace Flight Dynamics, Xi'an 710072, China
